Изобретение относится к машиностроению, в частности к конструкциям манипуляторов и может быть иснользовано при механизации и автоматизации производственных процессов в различных отраслях техники.
Цель изобретения - упрощение конструкции и уменьшение габаритов манипулятора за счет обеспечения компактности и снижения металлоемкости.
На чертеже представлен манипулятор, общий вид.
Манипулятор содержит установленную на портале 1 с возможностью аозвратно- поступательного перемещения опорную площадку (основание) 2, схват 3 с механизмом его вертикального перемещения. Последний выполнен в виде параллельно установленных дисков 4 с размещенными между ними коническими пружинами 5, жестко связанными с дисками 4, которые соединены между собой гибкими связями (тягами), выполненными в виде металлических лент 6, проходящих через прорези или радиальные отверстия дисков 4. Одни концы лент 6 жестко связаны с нижним диском 4, несущим захват 3, а другие - с намоточными барабанами 7, которые кинематически связаны между собой коническими передачами 8, с датчиками 9 обратной связи с двигателем 10 (приводом), уста- новленными на опорной площадке 2 (основании).
0
5
Манипулятор работает следующи.м образом.
В исходном состоянии схват 3 находится в верхнем положении. Ленты 6 максимально накручены на барабаны 7, при этом пружины 5 сжаты между дисками 4, опорной площадкой 2 до плоского состояния. Таким образом, расстояние между опорной площадкой 2 и нижним диском 4 равно 6-«+d(n+l), где п - количество дисков;
б - толщина дисков;
d - диаметр проволоки конической пружины.
При включении двигателя 10 на опускание схвата 3 манипулятора происходит синхронное раскручивание лент 6 барабанов 7. Под действием упругих сил пружин 5 и веса перемещающегося вертикально механизма пружины 5 разжимают диски 4, и нижний диск вместе с закрепленным на нем схватом 3 начинает перемещаться вертикально вниз, вытягивая за собой ленты 6 до заданного размера. При этом величину опускания контролирует датчик 9 обратной связи. В заданной позиции может осуществляться захват или опускание предмета.
При включении двигателя 10 на подъем схвата 3 манипулятора происходит синхронное закручивание лент 6 на барабаны 7. Под действием момента, создаваемого двигателем 10, ленты поднимают нижний опорный диск со схватом 3, сжи.мая конические пружины 5. Подъем схвата 3 происходит до заданного размера, контролируемого датчиком 9 обратной связи.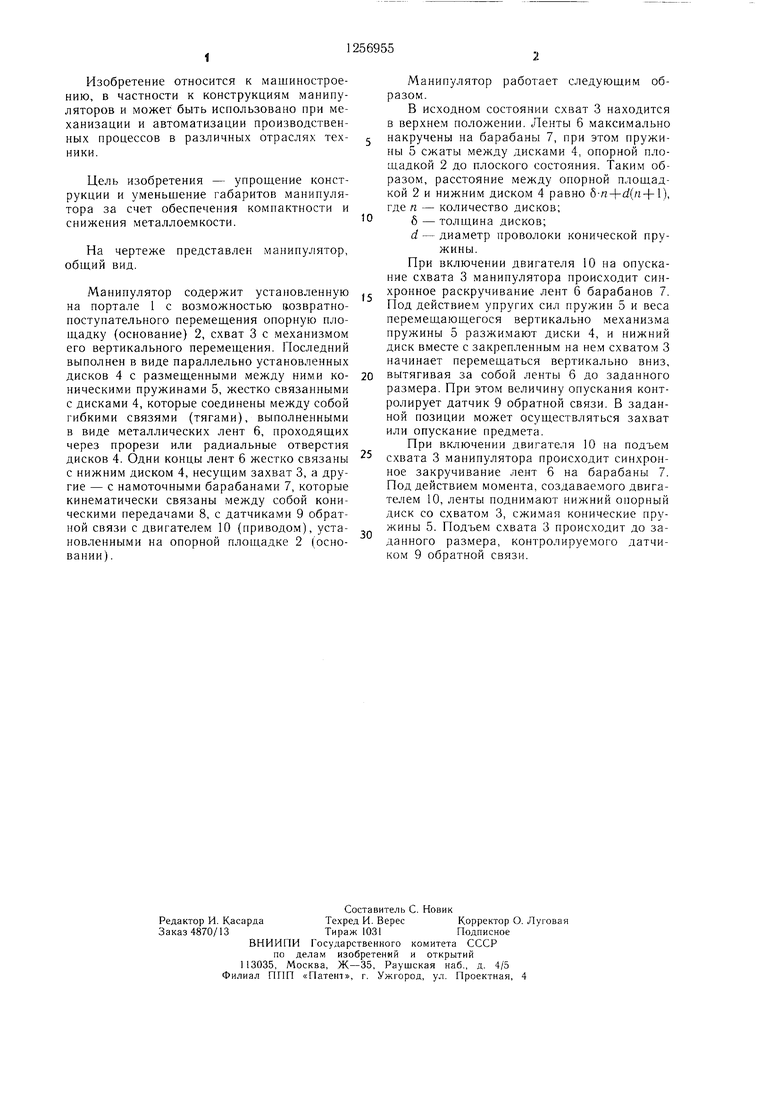
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| УНИВЕРСАЛЬНЫЙ КОМПЛЕКС ДОЛИНСКОГО УКД, СЕКЦИЯ КРЕПИ (ВАРИАНТЫ), ПЕРЕКРЫТИЕ КРЕПИ, ВЫДВИЖНОЙ КОЗЫРЕК, СТАВ, ЛЕНТОЧНЫЙ КОНВЕЙЕР, МЕХАНИЗМ ЦЕНТРИРОВАНИЯ ЛЕНТЫ, УСТРОЙСТВО УПРАВЛЕНИЯ КОНВЕЙЕРА, КОМБАЙН ОЧИСТНОЙ (ВАРИАНТЫ), УСТРОЙСТВО ПОДЪЕМА БАРАБАНА КОМБАЙНА, ПРИВОД ОТБОЙНОГО БАРАБАНА КОМБАЙНА, СПОСОБ ОБЕСПЫЛИВАНИЯ РАБОЧЕГО ПРОСТРАНСТВА, УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ, МАНИПУЛЯТОР ОЧИСТНОГО КОМПЛЕКСА, ЛЕСТНИЦА СТОЕЧНАЯ | 1997 |
|
RU2130554C1 |
| Устройство для сборки керамических пластинчатых конденсаторов с однонаправленными выводами | 1989 |
|
SU1653015A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Испытательный комплекс | 1984 |
|
SU1224731A1 |
| МАНИПУЛЯТОР | 1996 |
|
RU2111113C1 |
| Способ манипулирования ферромагнитными деталями с отверстием | 1986 |
|
SU1799727A1 |
| ТРАНСПОРТНЫЙ РОТОР РОТОРНОЙ ТАБЛЕТОЧНОЙ МАШИНЫ | 2004 |
|
RU2296052C2 |
| Бухтосъемный манипулятор трубоволочильного стана с вертикальным барабаном | 1983 |
|
SU1168310A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |

| Манипулятор | 1974 |
|
SU965758A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Манипулятор | 1982 |
|
SU1041283A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
