Изобретение относится к автоматизации транспортных установок с дискретно изменяющейся массой и переменными условиями перемещения и может быть использовано в системах автоматического управления движением штабелеров, тележек монорельсовых дорог.
Известно устройство для позиционирования транспортного механизма, содержащее блоки управления режимами включения и торможения, датчик и задатчик положения, усилитель мощности и блок формирования времени включения и торможения электродвигателя, к одному и другому входам которого подключены датчик и задатчик положения. Оно снабжено датчиком скорости и анализатором динамических характеристик, соединенными последовательно, сумматором и датчиком ускорения, подключенным к одному из входов сумматора, к другому входу которого подключен одним из выходов блок формирования времени включения и торможения электродвигателя, другие выходы которого подключены к входу блока управления режимом включения и одному из входов блока управления режимом торможения электродвигателя, а третий вход - к выходу анализатора динамических характеристик, причем выход сумматора через усилитель мощности соединен с другим входом блока управления режимом торможения [1].
Наиболее близким по технической сущности и достигаемому техническому результату является устройство для позиционирования транспортного механизма, содержащее блоки управления режимами включения и торможения, датчик и задатчик положения, усилитель мощности и блок формирования времени включения и торможения электродвигателя, к одному и другому входам которого подключен датчик и задатчик положения, датчик скорости и анализатор динамических характеристик, соединенные последовательно, сумматор и датчик ускорения, подключенный к одному из входов сумматора, к другому входу которого подключен одним из выходов блок формирования времени включения и торможения электродвигателя, другие выходы которого подключены к входу блока управления режимом включения и одному из входов блока управления режимом торможения электродвигателя, а третий вход - к выходу анализатора динамических характеристик, причем выход сумматора через усилитель мощности соединен с другим выходом блока управления режимом торможения, блок управления точным остановом с подключенным к его выходу исполнительным блоком и блоком выделения минимального сигнала, входы которого подключены к датчику и задатчику положения, а выход - к одному из входов блока управления точным остановом, соединенного другим входом и датчиком скорости [2].
Недостатком прототипа является то, что разгон транспортного механизма осуществляется при любой, зачастую случайной величине ускорения, само же устройство может работать лишь при заданной величине ускорения, в то время как в ряде случаев в процессе разгона и торможения требуется изменять или ограничивать величину ускорения.
Задачей изобретения является создание устройства для позиционирования транспортного механизма, обеспечивающего достижение технического результата, заключающегося в повышении гибкости управления движением транспортного механизма за счет регулирования скорости при разгоне и торможении, ускорения при разгоне, обеспечения возможности изменения ускорения по заранее заданной программе за счет введения управления в функции третьей производной от пути.
Поставленная задача решается тем, что устройство содержит блоки управления режимом включения и торможения, датчик и задатчик положения, усилитель мощности и блок формирования времени включения и торможения электродвигателя, к одному и другому входам которого подключен датчик и задатчик положения, датчик скорости и анализатор динамических характеристик, соединенные последовательность, сумматор и датчик ускорения, подключенный к одному из входов сумматора, к другому входу которого подключен одним из выходов блок формирования времени включения и торможения электродвигателя, другие выходы которого подключены к входу блока управления режимом включения и одному из входов блока управления режимом торможения электродвигателя, а третий вход - к выходу анализатора динамических характеристик, причем сумматора через усилитель мощности соединен с другим входом блока управления режимом торможения, а также содержит блок управления точным остановом с подключенным к его выходу исполнительным блоком и блок выделения минимального сигнала, входы которого подключены к датчику и задатчику положения, а выход - к одному из входов блока управления точным остановом, соединенным другим входом с датчиком скорости.
Новым по сравнению с прототипом является то, что оно имеет задатчики скорости, задатчики ускорения, задатчики третьей производной, блок дифференцирования, дополнительно - сумматоры, усилители мощности, при этом выходы задатчиков скорости, ускорения и третьей производной подключены к входам блока формирования времени включения и торможения электродвигателя, первые входы второго и третьего сумматоров соединены с выходами датчика скорости, вторые входы - с выходами блока формирования времени включения и торможения электродвигателя, а выходы второго и третьего сумматоров через второй и третий усилители мощности подключены к блоку управления режимом торможения и блоку управления режимом включения соответственно, один вход четвертого сумматора соединен с выходом датчика ускорения, другой вход - с выходом блока формирования времени включения и торможения электродвигателя, а выход четвертого сумматора через четвертый усилитель мощности подключения к одному из входов блока управления режимом включения, один из выходов датчика ускорения соединен с входом блока дифференцирования, выходы которого подсоединены к входам пятого и шестого сумматоров, вторые входы которых подсоединены к выходам блока формирования времени включения и торможения электродвигателя, выход пятого сумматора через пятый усилитель мощности - к одному из входов блока управления режимом торможения, выход шестого сумматора через шестой усилитель мощности - к одному из входов блока управления режимом включения.
Введение новых стандартных элементов по сравнению с прототипом, а именно задатчиков скорости, задатчиков ускорения, задатчиков третьей производной, блока дифференцирования, дополнительно - сумматоров, усилителей мощности и указанное их соответствующее подключения обеспечивает возможность работы устройства для позиционирования транспортного механизма при заданных характерах изменения в функции времени пути, скорости, ускорения.
Сущность изобретения поясняется чертежом, на котором показана функциональная схема устройства.
Устройство содержит датчик 1 скорости, соединенный своим выходом с входом анализатора 2 динамических характеристик, блок 3 формирования времени включения и торможения электродвигателя, датчик 4 положения, задатчик 5 положения, блок 6 управления режимом торможения, блок 7 управления режимом включения, электродвигатель 8, датчик ускорения, усилители 10, 11, 12, 13, 14, 15 мощности, сумматоры 16, 17, 18, 19, 20, 21, задатчики 22, 23 скорости, задатчики 24, 25 ускорения, задатчики 26, 27 третьей производной, блок 28 выделения минимального сигнала, блок 29 управления точным остановом, исполнительный блок 30, блок 31 дифференцирования.
Устройство работает следующим образом. При подаче команды от датчика 5 положения через блок 3 формирования времени включения и торможения электродвигателя сигнал через блок 7 управления режимом включения подается на электродвигатель 8, вследствие чего начинается вращение ротора электродвигателя 8 и перемещение механизма.
При вращении ротора электродвигателя 8 появляется сигнал от датчика 1 скорости, который подается на анализатор 2 динамических характеристик, вычисляющий по переходной функции динамические характеристики транспортного механизма (время запаздывания и постоянную времени). Сигналы с выхода анализатора 2 динамических характеристик поступают на блок 3 формирования времени включения и торможения электродвигателя, на который также поступают сигналы от датчика 4 положения и задатчика 5 положения. С учетом сигналов от анализатора 2 динамических характеристик, датчика 4 положения и задатчика 5 положения в блоке 3 формирования времени включения и торможения электродвигателя вырабатываются команды, определяющие продолжительность включения электродвигателя 8 через блок 7 управления режимом включения и время начала торможения электродвигателя 8 через блок 6 управления режимом торможения.
По истечении интервала времени, соответствующего вычисленной продолжительности включения, на блок 7 управления режимом включения подается команда на прекращение режима включения от блока 3 формирования времени включения и торможения электродвигателя, и транспортный механизм продолжает движение по инерции.
Для обеспечения точного позиционирования транспортного механизма блок 3 формирования времени включения и торможения электродвигателя подает в заранее вычисленный момент времени команду на блок 6 управления режимом торможения, осуществляя таким образом активное торможение электродвигателя 8.
Для осуществления разгона и торможения с заданной скоростью сигнал от датчика 1 скорости и от блока 3 формирования времени включения и торможения электродвигателя поступают на сумматоры 16 и 17 и далее через усилители 13 и 12 мощности подается команда коррекции на блок 6 управления режимом торможения и блок 7 управления режимом включения.
Для обеспечения изменения ускорения по заданному закону, например по линейному, сигнал от датчика 9 ускорения поступает на блок 31 дифференцирования, с выхода которого сигнал, пропорциональной третьей производной от пути, поступает на сумматоры 16 и 17, на другие входы которых подается сигнал от блока 3 формирования времени включения и торможения электродвигателя, определяющий заданную программу изменения третьей производной. Например, для обеспечения линейного изменения ускорения во времени третья производная от пути должна быть постоянной. С сумматоров 16 и 17 через усилители 14 и 15 мощности команда коррекции подается на блок 6 управления режимом торможения и блок 7 управления режимом включения. Одновременно блок 3 формирования времени включения и торможения электродвигателя задает линейный темп нарастания ускорения путем коррекции сигналов, подаваемых на сумматора 20 и 21. Аналогично блок 3 формирования времени включения и торможения электродвигателя корректирует сигналы, подаваемые на сумматоры 18 и 19, на этот раз в виде квадратичной функции. Это обеспечивает линейный закон изменения ускорения во времени при разгоне и торможения транспортного механизма.
Для обеспечения более точного позиционирования транспортного механизма при наличии случайных возмущений при подходе транспортной установки в точку позиционирования сигнал от датчика 4 положения и задатчика 5 положения подается на блок 28 выделения минимального сигнала, который подает команду на блок 29 управления точным остановом, воздействующий через исполнительный блок 30 на электродвигатель 8.
Все указанные элементы, входящие в схему устройства, выбраны стандартными.
Изобретение может быть использовано при проектировании и внедрении новых высокоскоростных транспортно-технологических установок - монорельсовых дорог, грузовозов, обеспечивающих перемещение грузов при заданных величинах скорости, ускорения, при дополнительной возможности существенного уменьшения или полного исключения необходимости работы механизмов в режиме доводочной скорости, что существенно влияет на надежность и производительность транспортно-технологических установок.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВАЛОПОВОРОТНОЕ УСТРОЙСТВО | 2000 |
|
RU2178087C1 |
| УСТРОЙСТВО ДЛЯ ПОВОРОТА РОТОРА ТУРБОАГРЕГАТА | 2000 |
|
RU2201509C2 |
| МНОГОДВИГАТЕЛЬНЫЙ ПРИВОД КОНВЕЙЕРНЫХ СИСТЕМ | 1996 |
|
RU2111158C1 |
| Устройство для позиционирования транспортного механизма | 1981 |
|
SU1071546A2 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД СУПЕРКАЛАНДРА | 1997 |
|
RU2131641C1 |
| Устройство для позиционирования тарнспортного механизма | 1979 |
|
SU779201A1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЭЛЕКТРОПРИВОД БУМАГОДЕЛАТЕЛЬНОЙ МАШИНЫ | 2002 |
|
RU2203997C1 |
| ВЕТРОЭЛЕКТРИЧЕСКАЯ УСТАНОВКА | 2001 |
|
RU2210854C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ СТЕНД ДЛЯ ОБКАТКИ И ИСПЫТАНИЙ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 1997 |
|
RU2133017C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С ФРИКЦИОННОЙ НАГРУЗКОЙ | 1992 |
|
RU2079961C1 |
Изобретение используется в системах автоматизации транспортных установок с дискретно изменяющейся массой. Устройство содержит блок управления режимом включения и торможения, блок формирования времени включения и торможения, анализатор динамических характеристик, датчики скорости, ускорения, датчик и задатчик положения, сумматоры и усилители мощности, а также блок управления точным остановом и блок выделения минимального сигнала. Дополнительно устройство имеет задатчики скорости, ускорения, третьей производной, блок дифференцирования, дополнительные сумматоры и усилители мощности. Подключены элементы так, что вместе с блоком формирования времени включения и торможения образуют контуры регулирования скорости и ускорения при разгоне и торможении. Это позволяет повысить гибкость и надежность управления движением транспортного механизма. 1 ил.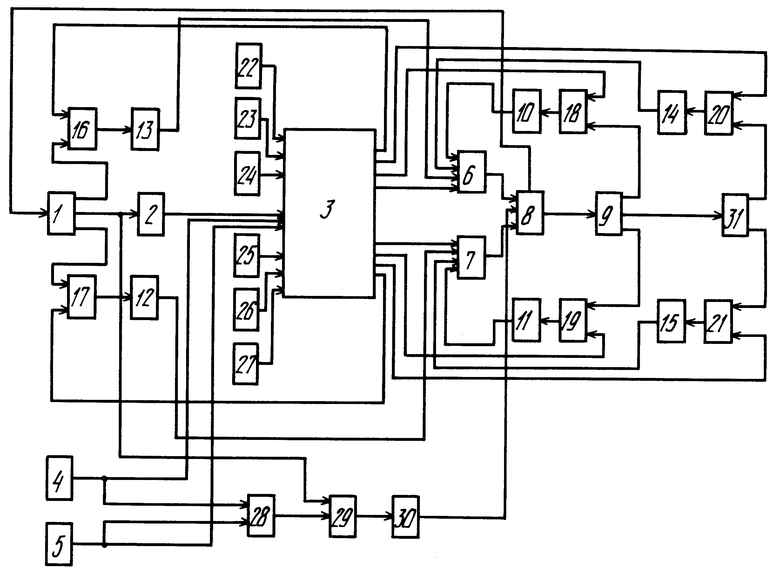
Устройство для позиционирования транспортного механизма, содержащее блоки управления режимом включения и торможения, датчик и задатчик положения, усилитель мощности и блок формирования времени включения и торможения электродвигателя, к одному и другому входам которого подключен датчик и задатчик положения, датчик скорости и анализатор динамических характеристик, соединенные последовательно, сумматор и датчик ускорения, подключенный к одному из входов сумматора, к другому входу которого подключен одним из выходов блок формирования времени включения и торможения электродвигателя, другие выходы которого подключены к входу блока управления режимом включения и одному из входов блока управления режимом торможения электродвигателя, а третий вход - к выходу анализатора динамических характеристик, причем выход сумматора через усилитель мощности соединен с другим входом блока управления режимом торможения, блок управления точным остановом с подключенным к его выходу исполнительным блоком и блок выделения минимального сигнала, входы которого подключены к датчику и задатчику положения, а выход - к одному из входов блока управления точным остановом, соединенным другим входом с датчиком скорости, отличающееся тем, что оно имеет задатчики скорости, задатчики ускорения, задатчики третьей производной, блок дифференцирования, дополнительно - сумматоры, усилители мощности, при этом выходы задатчиков скорости, ускорения и третьей производной подключены к входам блока формирования времени включения и торможения электродвигателя, первые входы второго и третьего сумматоров соединены с выходами датчика скорости, вторые входы - с выходами блока формирования времени включения и торможения электродвигателя, а выходы второго и третьего сумматоров через второй и третий усилители мощности подключены к блоку управления режимом торможения и блоку управления режимом включения соответственно, один вход четвертого сумматора соединен с выходом датчика ускорения, другой вход - с выходом блока формирования времени включения и торможения электродвигателя, а выход четвертого сумматора через четвертый усилитель мощности подключен к одному из входов блока управления режимом включения, один из выходов датчика ускорения соединен с входом блока дифференцирования, выходы которого подсоединены к входам пятого и шестого сумматоров, вторые входы которых подсоединены к выходам блока формирования времени включения и торможения электродвигателя, выход пятого сумматора через пятый усилитель мощности - к одному из входов блока управления режимом торможения, выход шестого сумматора через шестой усилитель мощности - к одному из входов блока управления режимом включения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 779201, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 1071546, кл | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
