Изобретение, относится к автоматизации транспортных установок с дискретно изменяющейся массой, например штабелеров, тележек монорельсовых дорог и т. д., и с переменными условиями перемещения.
Наиболее близким к изобретению по технической сущности и достигаемому результату является устройство для позиционирования транспортного механизма, содержащее блоки управления режимами включения и торможения, датчик и задатчик положения, усилитель мощности и блок формирования времени включения и торможения электродвигателя, к одному и другому входам которого подключены датчик и. задатчик положения 1.
Недостатком такого устройства является отсутствие учета изменяющихся динамических характеристик перемещающегося механизма в связи с дискретным изменением массы и условий пе4}емещения, что отрицательно сказывается на точности позиционирования и надежности работы устройства.
Цель изобретения - повыщение.точности позиционирования и надежности устройства.
Поставленная цель достигается тем, что устройство для позиционирования транспортного механизма снабжено датчиком скорости и анализатором динамических характеристик, соединенными последовательно, сумматором и датчиком ускорения, подключенным к одному из входов сумматора, к другому бходу которого подключен одним из выходов блок формирования времени включения и торможения электродвигателя, другие выходы котЬрого подключены ко вхо10ду блока управления режимом включения и одному из входов блока управления режимом торможения электродвигателя, а третий вход - к выходу анализатора динамических характеристик, причем выход сумматора через усилитель мощности соединен с
15 другим входом блока управления режимом торможения.
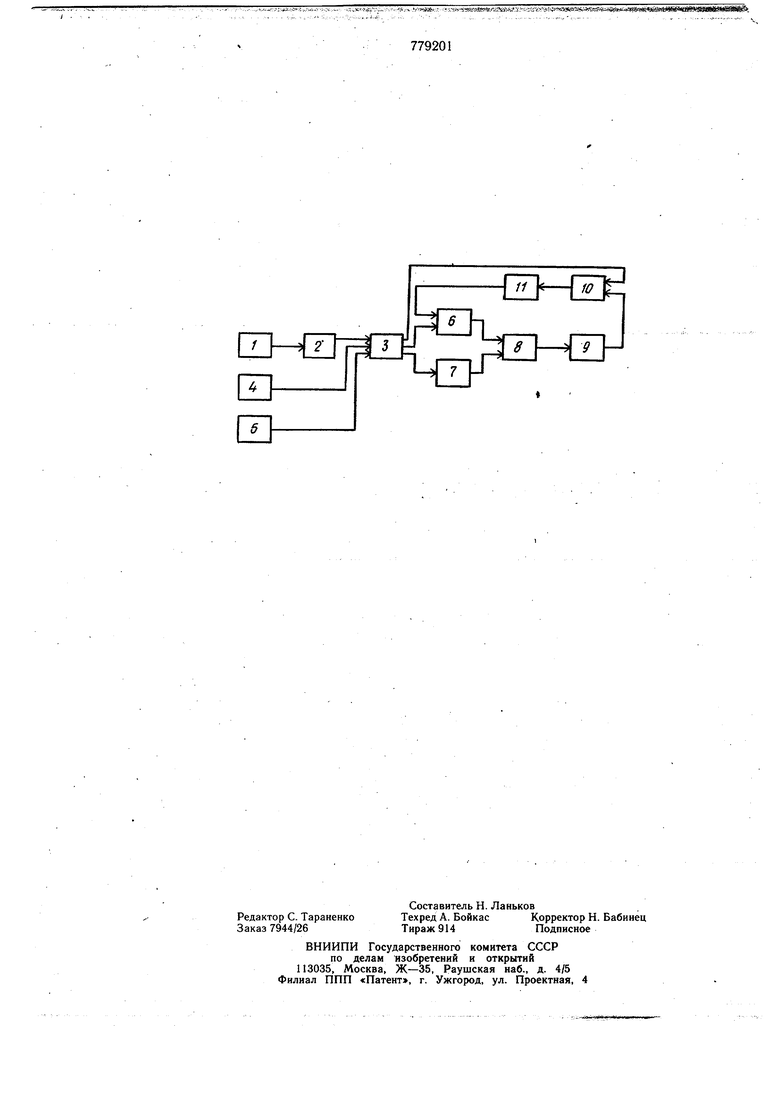
На чертеже показана функциональная схема устройства.
Устройство содержит датчик 1 скорости,
20 подсоединенный своим выходом к входу анализатора 2 динамических характеристик, блок 3 формирования времени включения и торможения электродвигателя, датчик 4 положения, задатчик 5 положения, блок 6 управления режимом торможения и блок 7 управления режимом включения, воздействующие на электродвигатель 8, датчик 9 ускорения, сумматор 10, усилитель 11 мощности. Датчик скорости связан с валом электродвигателя 8. Устройство работает следующим образом. При подаче команды от задатчика 5 положения через блок 3 формирования времени включения и торможения электродвигателя сигнал через блок 7 управления режи мом включения подается на электродвигатель 8, вследствие чего начинается вращение ротора электродвигателя и перемещение механизма. При вращении ротора электродвигателя 8 появляется сигнал от датчика 1 скорости, который подается на анализатор 2 динамических характеристик, вычисляющий по переходной функции динамические характеристики транспортного механизма (время запаздывания и постоянную времени) Сигналы с выхода анализатора 2 динамических характеристик поступают на блок 3 формирования времени включения и торможення электродвигателя, на который также поступают сигналы от датчика 4 положения и задатчика 5 положения. С учетом сигналов от анализатора 2 динамических характеристик, датчика 4 положения и задатчика 5 положения в блоке 3 формирования времени включения и торможения электродвигателя вырабатываются команды, определяющие продолжительность включения электродвигателя 8 через блок 7 управления режимом включения и время начала торможения электродвигателя 8 через блок 6 управления режимом торможения. По истечении интервала времени, соответствующего вычисленной продолжительности включения, на блок 7 управления режимом включения подается команда на прекращение режима включения от блока 3 формирования времени включения и торможения электродвигателя и транспортный механизм продолжает движение по инерции. Для обеспечения точного позиционирования транспортного механизма блок 3 формирования времени, включения и торможения электродвигателя подает в заранее вычисленный момент времени команду на блок 6 управления оежимом торможения, осущест.вляющим активное торможение электродвигателя 8. Для учета изменивщихся условий пере- . мещения и внесения коррекции в режим торможения сигнал от датчика 9 ускорения и от блока 3 формирования времени включения и торможения электродвигателя подается на сумматор 10, а далее через усилитель 11 мощности команда коррекции поступает на блок 6 управления режимом торможения. Устройство для позиционирования транспортного механизма позволяет повысить надежность работы механизмов с дискретной массой и меняющимися условиями перемещения, например переменным коэффициентом трения, что особенно важно при внедрении автоматизированных систем управления пОгрузочно-разгрузочных процессов. Формула изобретения Устройство для позиционирования транспортного механизма, содержащее блоки управления режимом включения и торможения датчик и задатчик положения, усилитель мощности и блок формирования времени включения и торможения электродвигателя, к одному и другому входам которого подключен датчик и задатчик положения, отличающееся тем, что, с целью повыщения точности позиционирования и надежности работы, оно снабжено датчиком скорости и анализатором динамических характеристик, соединенными последовательно, сумматором и датчиком ускорения, подключенным к одному из входов сумматора, к другому входу которого подключен одним из выходов блок формирования времени включения и торможения электродвигателя, другие выходы которого подключены ко входу блока управления режимом включения и одному из входов блока управления режимом торможения электродвигателя, а третий вход - к выходу анализатора динамических характеристик, причем выход сумматора через усилитель мощности соединен с другим входом блока управления режимом торгюжения. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 596518, кл. В 65 G 47/46, 01.06.76 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОЗИЦИОНИРОВАНИЯ ТРАНСПОРТНОГО МЕХАНИЗМА | 1996 |
|
RU2111159C1 |
| Устройство для позиционирования транспортного механизма | 1981 |
|
SU1071546A2 |
| ВАЛОПОВОРОТНОЕ УСТРОЙСТВО | 2000 |
|
RU2178087C1 |
| УСТРОЙСТВО ДЛЯ ПОВОРОТА РОТОРА ТУРБОАГРЕГАТА | 2000 |
|
RU2201509C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕХНИЧЕСКОГО СОСТОЯНИЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ И ЭКСПЕРТНАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2175120C2 |
| Система управления транспортным средством | 1987 |
|
SU1550480A1 |
| Электропривод постоянного тока | 1980 |
|
SU1023600A1 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| Способ подачи и точного останова хлыстов на раскряжовочных установках | 1980 |
|
SU905070A1 |
| Электропривод с автономным источником питания | 1984 |
|
SU1236594A1 |