Изобретение относится к области гироскопического и навигационного приборостроения, в частности к приборам по топографическому контролю разведочных скважин.
Известны системы контроля разведочных скважин, в которых спускаемые зонды содержат блок трех ортогональных акселерометров и трехкомпонентный магнитометр (Исаченко В.Х. Инклинометрия скважин. - М.: Недра, 1987).
Недостаток этих систем заключается в том, что с их помощью возможно проводить измерения параметров скважин только при неработающем буре и при полной остановке зонда.
Известен гироскопический инклинометр (Е.А. Салов, Р.И. Кривоносов, В.П. Ильчанинов и др. "Гироскопический инклинометр" - [1]), содержащий корпус, трехстепенный гироскоп, два датчика углов поворотов, закрепленных на подвижной эксцентричной рамке, измерительный датчик угловой скорости, моментный двигатель, преобразовательный блок и два цифровых фазометра, причем датчик угловой скорости установлен на наружной рамке трехстепенного гироскопа так, что его ось чувствительности расположена перпендикулярно вектору кинетического момента трехстепенного гироскопа, статор которого размещен на наружной рамке гироскопа, а ротор - на внутренней.
Недостатком данного инклинометра является большая сложность из-за необходимости применения двух прецизионных гироскопов - трехстепенного и двухстепенного.
Известен инклинометр (В.Н. Пономарев, В.Л. Нехорошков, А.А. Мухаметшин - [2] , содержащий корпус, датчики магнитного поля, маятниковые кардановы подвесы и грузик-эксцентрик, причем три ортогональных магнитометра установлены в наружной рамке с эксцентриком, обеспечивающим установку наружной рамки в апсидальной плоскости, а два других магнитометра установлены на двух маятниках, оси подвесов которых параллельны между собой и перпендикулярны плоскости эксцентрика, при этом ось чувствительности магнитометра, расположенного на верхнем маятнике, параллельна плечу маятника, а ось чувствительности магнитометра, укрепленного на нижнем маятнике, лежит в аспидальной плоскости и перпендикулярна плечу этого маятника.
Ближайшим по технической сущности к предлагаемому изобретению является измерительное устройство для контроля разведочной буровой скважины [3], имеющее зонд для введения в скважину, механизм для генерации сигнала, соответствующего скорости движения зонда в скважине, а также расположенные внутри зонда модуль датчиков первичной информации в виде трех акселерометров с ортогональными осями чувствительности и двух однокомпонентных датчиков угловой скорости, а также модуль обработки информации.
Недостатки данного устройства заключаются в следующем. Во-первых, это необходимость использования специального механизма генерации сигнала скорости движения зонда, нарушающего автономность работы опускаемого измерительного устройства, необходимость организации дополнительных линий связи для передачи с поверхности Земли сигналов скорости движения спускаемого зонда. Во-вторых, в условиях интенсивных линейных вибраций, возникающих при работающем буре, восстановление по сигналам акселерометров третьей компоненты угловой скорости вращения спускаемого зонда приводит к значительному повышению интенсивности случайных высокочастотных ошибок в определении угловых скоростей вращения зонда, что соответствующим образом ограничивает достижимую точность определения параметров скважин. В-третьих, в определении координат спускаемого зонда будет накапливаться ошибка, так как в качестве корректирующего сигнала в фильтре Кальмана, реализованного в модуле обработки информации, используется сигнал скорости поступательного движения зонда и систематические составляющие погрешности этого сигнала (нулевой сигнал, погрешность масштабного коэффициента) будут интегрироваться, что приведет к накоплению ошибки.
Задачей предлагаемого изобретения является обеспечение автономности работы системы и повышение точности определения параметров разведочных скважин.
Поставленная задача достигается тем, что в известное устройство для контроля параметров разведочной буровой скважины, содержащее зонд для контроля скважины, в составе которого имеется модуль датчиков первичной информации в виде маятниковых компенсационных акселерометров с ортогональными осями чувствительности и датчиков угловых скоростей, а также модуль обработки информации, входы которого соединены с выходами модуля датчиков первичной информации, введены третий датчик угловой скорости, ось чувствительности которого перпендикулярна осям чувствительности двух других датчиков угловой скорости, а также три магнитометра с ортогональными осями чувствительности. В состав модуля обработки информации введены блок фильтров нижних частот, блок вычисления параметров ориентации, блок идентификации режимов движения зонда, блок вычисления координат, содержащий блок коммутации, вычислитель направляющих косинусов и вычислитель координат, при этом выходы всех датчиков соединены через блок фильтров нижних частот с соответствующими входами блока вычисления параметров ориентации, три выхода которого соединены через блок коммутации с последовательно соединенными вычислителем направляющих косинусов и вычислителем координат, а выход датчика угловой скорости, ось чувствительности которого параллельна продольной оси зонда, дополнительно соединен через блок идентификации режимов движения зонда с управляющим входом блока коммутации, при этом блок вычисления параметров ориентации содержит вычислитель скорости измерения параметров ориентации, вычислитель алгебраических оценок параметров ориентации, три сравнивающих устройства, по три сумматора цепей позиционной и интегральной коррекции, по три интегратора прямой цепи и цепи интегральной коррекции, а также по три усилителя позиционной и интегральной коррекций, при этом три первых входа вычислителя скорости измерения параметров ориентации соединены с соответствующими выходами по угловым скоростям блока фильтров нижних частот, а выходы этого вычислителя в каждом из трех каналов соединены через соответствующие сумматоры цепей интегральной и позиционной коррекции с одним из интеграторов прямой цепи, выходы которых соединены с тремя другими входами вычислителя скорости изменения параметров ориентации и входами соответствующих сравнивающих устройств, вторые входы которых соединены с соответствующими выходами вычислителя алгебраических оценок параметров ориентации, входы которого соединены с шестью выходами блока фильтров нижних частот по сигналам напряженности магнитного поля Земли и сигналам ускорений, а также с выходами двух интеграторов прямой цепи, выход сравнивающего устройства в каждом из трех каналов соединен через последовательно соединенные интегратор и усилитель цепи интегральной коррекции с вторым входом сумматора цепи интегральной коррекции, а также через усилитель цепи позиционной коррекции - с вторым входом сумматора цепи позиционной коррекции, при этом блок идентификации режимов движения зонда содержит последовательно соединенные устройство умножения, фильтр и пороговое устройство, при этом два входа устройства умножения соединены между собой.
При определении приращения длины ствола скважины по сигналам акселерометров исключается возможность ошибочного счисления длины ствола скважины при остановках бура, не связанных с наращиванием бурильных труб. Для этого каждый маятниковый компенсационный акселерометр дополнительно содержит устройство переключения диапазонов и второй усилитель обратной связи, при этом датчик угла акселерометра соединен с первым входом устройства переключения диапазонов, а два соответствующих ему выхода соединены через соответствующие усилители с датчиком момента и с вторым и третьим входами устройства переключения диапазонов, а соответствующий им выход соединен с входом акселерометра, четвертый вход устройства является входом сигнала управления переключением диапазонов и соединен с выходом блока идентификации режимов движения зонда, при этом блок вычисления координат дополнительно содержит блок вычисления модуля ускорения, и последовательно соединенные блок вычисления глубины погружения и вычислитель приращения длины скважины, второй вход которого соединен со вторым выходом вычислителя направляющих косинусов, а выход - с четвертым входом вычислителя координат, входы блока вычисления модуля ускорения соединены с выходами по ускорениям блока фильтров нижних частот, а выход - через блок коммутации с входом блока вычисления глубины погружения. Недостатком данной схемы определения координат зонда является снижение точности определения координат вплоть до потери работоспособности блока вычисления координат при приближении ориентации оси зонда к плоскости горизонта.
Для эффективного использования информации о длине наращиваемых бурильных труб и исключения ошибочного счисления длины ствола скважины при остановках бура, не связанных с наращиванием бурильных труб, в систему дополнительно введено логическое устройство, включенное между вычислителем приращения длины скважины и вычислителем координат, при этом второй вход логического устройства подключен к второму входу вычислителя направляющих косинусов.
На фиг. 1 представлена функциональная схема системы определения параметров разведочных скважин; на фиг. 2 и 3 - функциональные схемы блока вычисления параметров ориентации и блока идентификации режимов движения зонда соответственно; на фиг. 4 - кинематическая функциональная схема компенсационного акселерометра; на фиг. 5 и 6 - варианты исполнения блока вычисления координат.
Система содержит зонд, в составе которого имеется модуль 1 (см. фиг. 1) датчиков первичной информации (ДПИ), состоящий из блока трех датчиков угловой скорости (ДУС), блока трех магнитометров (ММ) и блока трех маятниковых компенсационных акселерометров (АМК). Оси чувствительности каждой тройки датчиков образуют ортогональные трехгранники, коллинеарные между собой и с осями опускаемого зонда. Кроме этого, зонд содержит модуль обработки информации, в состав которого входят блок 2 фильтров нижних частот (ФНЧ), блок 3 вычисления параметров ориентации (БВПО), блок 4 идентификации режимов (БИР) движения основания, блок 5 вычисления координат (БВК), содержащий блок 6 коммутации (БК), вычислитель 7 направляющих косинусов (ВК) и вычислитель 8 координат (ВК).
Выходы всех ДПИ соединены через блок ФНЧ с соответствующими входами БВПО, три выхода которого соединены через БК с последовательно соединенными ВНК и ВК, а выход датчика угловой скорости, ось чувствительности которого параллельна продольной оси зонда, дополнительно соединен через БИР с управляющим входом БК.
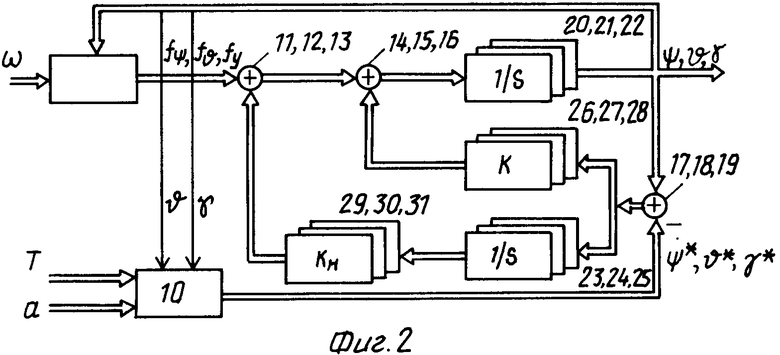
БВПО (см. фиг. 2) содержит вычислитель 9 скорости измерения параметров ориентации (ВСИПО), вычислитель 10 алгебраических оценок параметров ориентации (ВАОПО), по три сумматора 11, 12, 13 цепей интегральной и 14, 15, 16 позиционной коррекций, а также три сравнивающих устройства 17, 18, 19, по три интегратора 20, 21, 22 прямой цепи и 23, 24, 25 цепи интегральной коррекции, а также по три усилителя 26, 27, 28 позиционной и 29, 30, 31 интегральной коррекций. Три первых входа ВСИПО соединены с соответствующими выходами по угловым скоростям блока ФНЧ, а выходы ВСИПО в каждом из трех каналов соединены через соответствующие сумматоры 11 (12, 13) цепей интегральной и 14 (15, 16) позиционной коррекции с одним из интеграторов 20 (21, 22) прямой цепи, выходы которых соединены с тремя другими входами ВСИПО и входами соответствующих сравнивающих устройств 17 (18, 19), вторые входы которых соединены с соответствующими выходами ВАОПО. При этом входы ВАОПО соединены с шестью выходами блока ФНЧ по сигналам напряженности магнитного поля Земли и сигналам ускорений, а также с выходами двух интеграторов (21, 22) прямой цепи. Выход сравнивающего устройства 17 (18, 19) в каждом из трех каналов соединен через последовательно соединенные интегратор 23 (24, 25) и усилитель 29 (30, 31) цепи интегральной коррекции с вторым входом сумматора 11 (12, 13) цепи интегральной коррекции, а также через усилитель 26 (27, 28) цепи позиционной коррекции - с вторым входом сумматора 14 (15, 16) цепи позиционной коррекции.
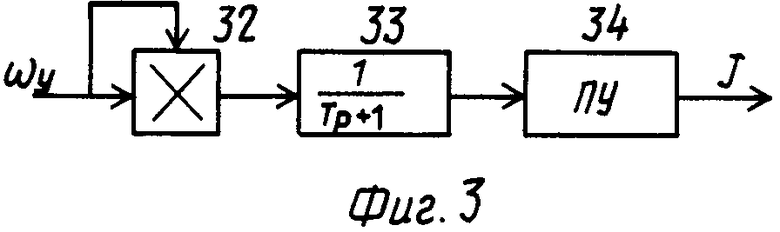
Блок 4 идентификации режимов движения зонда (см. фиг. 3) содержит последовательно соединенные устройство умножения 32, фильтр 33 и пороговое устройство (ПУ) 34, при котором два входа устройства умножения соединены между собой.
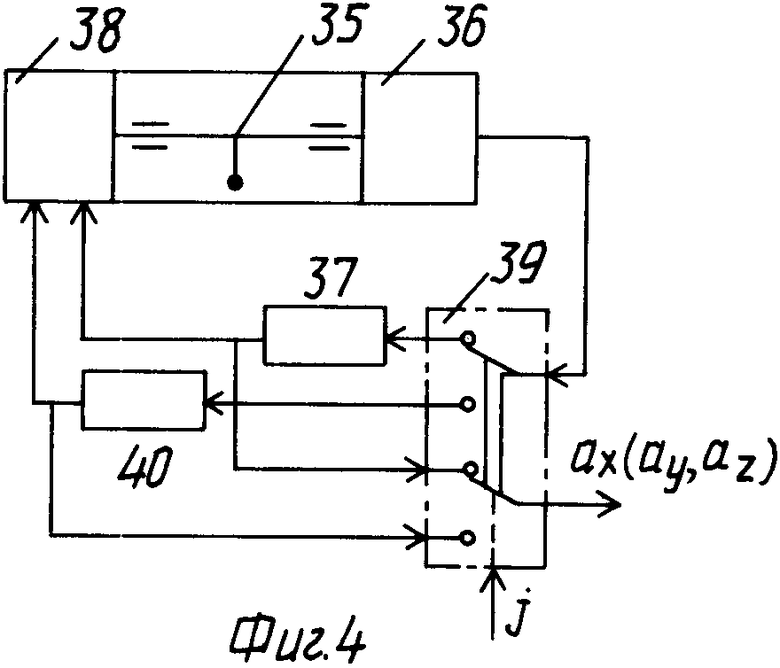
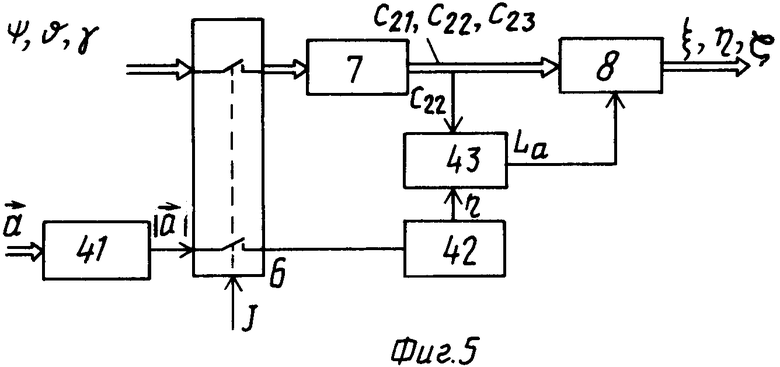
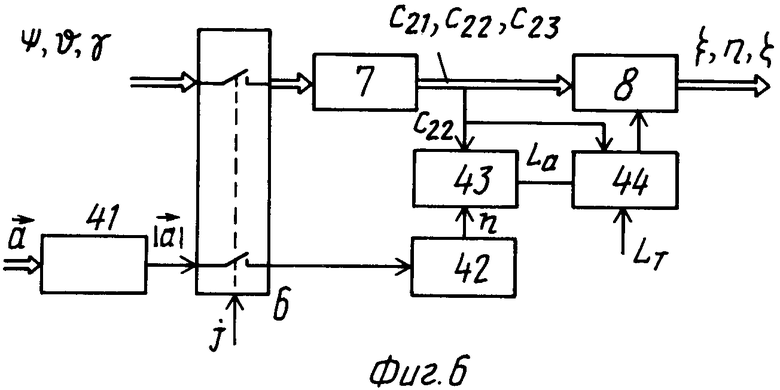
Во второй модификации БВК (см. фиг. 5) он дополнительно содержит блок 41 вычисления модуля ускорения (БМВУ), и последовательно соединенные блок 42 вычисления глубины погружения (БВГП) и вычислитель 43 приращения длины скважины (ВПДС), второй вход которого соединен со вторым выходом ВНК, а выход - с четвертым входом ВК, входы БВМУ с выходами по ускорениям блока ФНЧ, а выход - через БК с входом БВГП. При этом каждый АМК (см. фиг. 4), содержащий маятниковый чувствительный элемент 35, датчик угла 36, усилитель обратной связи 37 и датчик момента 38, дополнительно содержит устройство 39 переключения диапазонов и второй усилитель 40 обратной связи, при этом датчик угла акселерометра соединен с первым входом устройства переключения диапазонов, а два соответствующих ему выхода соединены через соответствующие усилители с датчиком момента и с вторым и третьим входами устройства переключения диапазонов, а соответствующий им выход соединен с входом акселерометра, четвертый вход устройства является входом сигнала управления переключением диапазонов и соединен с выходом БИР.
В третьей модификации БВК (см. фиг. 5) он дополнительно содержит логическое устройство 44, включенное между ВПДС и ВК, при этом второй вход логического устройства подключен к второму выходу ВНК.
Система определения параметров разведочных скважин работает следующим образом.
Оценки параметров ориентации ψ, ϑ, γ формируются блоком 3 по сигналам датчиков угловой скорости, магнитометров и акселерометров, предварительно обработанным в блоке 2 фильтром нижних частот, по следующему алгоритму.
Вычислитель 9 по сигналам угловых скоростей  и оценкам параметров ориентации ψ, ϑ, γ формирует оценки скоростей изменения параметров ориентации.
и оценкам параметров ориентации ψ, ϑ, γ формирует оценки скоростей изменения параметров ориентации.
Вычислитель 10 по сигналам ускорений  = col (ax, ay, az), напряженности магнитного поля Земли
= col (ax, ay, az), напряженности магнитного поля Земли  = col (Tx, Ty, Tz), а также, используя оценки ϑ и γ , формирует алгебраические оценки параметров ориентации.
= col (Tx, Ty, Tz), а также, используя оценки ϑ и γ , формирует алгебраические оценки параметров ориентации.
 .
.
Далее алгебраические оценки ψ, ϑ, γ сравниваются на сумматорах 17, 18, 19 с оценками параметров ориентации ψ, ϑ, γ и с помощью усилителей 26, 27, 28, а также усилителей 29, 30, 31 и интеграторов 23, 24, 25 реализуется позиционно-интегральная коррекция по разностям ψ*-ψ, ϑ*-ϑ, γ*-γ.
Корректирующие сигналы (позиционной и интегральной коррекции) через сумматоры 11 - 16 совместно с соответствующими выходными сигналами блока 9 подаются на соответствующие интеграторы 20, 21, 22, на выходе которых и формируются оценки параметров ориентации.
Вычисление координат зонда осуществляется в моменты остановки бура для наращивания бурильных труб. При работающем буре датчик угловой скорости, ось чувствительности которого параллельна продольной оси зонда, реагирует на круговые вибрации, среднеквадратическое значение его сигнала, вычисляемое в блоке 4, резко увеличивается. Это служит признаком работы бура (J = 0). Таким образом, алгоритм формирования управляющего сигнала имеет следующий вид:
где
Δ = 0,01 с-2;
T = 20 - 40 с - постоянная времени;
p - оператор дифференцирования.
При остановке бура блок 4 вырабатывает сигнал J = 1 и блок 6 коммутирует выходы БВПО и входы ВНК, где определяются направляющие косинусы
c21= sinϑ; c22= cosϑ•cosγ; c23= -cosϑ•sinγ. (5) .
После этого 8 однократно определяет координаты зонда по алгоритму: n = n + 1; ,
,
где
L = LT - длина наращиваемых бурильных труб;
n - порядковый номер остановки бура.
При счислении координат по сигналам маятниковых компенсационных акселерометров (БВК второй модификации - см. фиг. 5) система работает следующим образом.
Перед опусканием зонда в скважину при неработающем буре в систему подается питание. В блоке 4 формируется сигнал определенного уровня (J = 1), который коммутирует ключи в блоке 6 и переключает обратную связь и входной сигнал в каждом акселерометре с помощью устройства 39 на усилитель 40 малого диапазона измерения (1,01 g). Сигналы акселерометров поступают в блок 2, который срезает в них высокочастотные составляющие частотой выше 5 Гц. Затем сигналы ускорения поступают в блок 41, который формирует оценку модуля ускорения по следующему алгоритму: .
.
Выходной сигнал блока 41 поступает в блок 42, где фиксируется значение модуля ускорения на поверхности Земли .
.
При последующих остановках процесса бурения акселерометры описанным выше способом переводятся на малый диапазон измерения и по их сигналам в блоке 42 определяется глубина погружения зонда по следующему алгоритму: ,
,
где
R = 6,37 • 106 м - радиус Земли.
Блок 43 с учетом значения ηn и значения глубины ηn-1 погружения зонда при предыдущей остановке определяет приращение длины скважины
La= (ηn-ηn-1)/c22. (10) .
После этого в блоке 8 по аналогии с выражениями (6) определяются координаты зонда, при этом L = La.
При третьей модификации БВК (фиг. 6) перед вычислением координат с помощью логического устройства 44 определяется, что принять за истинное приращение длины скважины: LT - длину бурильной трубы или La. При этом учитывается, что при приближении продольной оси зонда к плоскости горизонта точность определения приращения длины скважины по сигналам акселерометров резко снижается и за истинное значение данного параметра следует принимать LT (блок 43 определяет L = LT). При других ориентациях зонда сравнение La и LT позволяет определить остановки бура, не связанные с наращиванием бурильных труб - в этих условиях блок 44 определяет L = La или выдает сигнал на запрет вычисления координат на данном такте. Таким образом, алгоритм работы логического устройства имеет следующий вид: с
с
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗАБОЙНЫХ СКВАЖИН | 2001 |
|
RU2204712C2 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2001 |
|
RU2197714C1 |
| СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 1999 |
|
RU2152059C1 |
| СИСТЕМА ОРИЕНТАЦИИ | 2003 |
|
RU2239160C1 |
| Способ автономной ориентации подвижного объекта с помощью инерциального измерительного модуля | 2019 |
|
RU2738342C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ДЕВИАЦИОННЫХ РАБОТ НА ПОДВИЖНЫХ ОБЪЕКТАХ | 1998 |
|
RU2156440C2 |
| СИСТЕМА ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ И КООРДИНАТ ДЕФЕКТОВ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2004 |
|
RU2261424C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ СЕЙСМОПРИЕМНИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2209449C1 |
| ЛАЗЕРНЫЙ ВОЛОКОННЫЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ | 1996 |
|
RU2129283C1 |
| АВТОНОМНЫЙ КОМПЛЕКС ДЛЯ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ СИСТЕМ ПЛАТФОРМЕННОЙ ОРИЕНТАЦИИ И НАВИГАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2826826C2 |
Изобретение относится к области гироскопического и навигационного приборостроения, в частности к приборам по топографическому контролю разведочных скважин. Система определения параметров разведочных скважин содержит зонд для контроля скважины, в составе которого имеется модуль датчиков первичной информации в виде трех маятниковых компенсационных акселерометров с ортогональными осями чувствительности и трех датчиков угловых скоростей, модуль обработки информации, входы которого соединены с выходами модуля датчиков первичной информации, а также три магнитометра с ортогональными осями чувствительности. В состав модуля обработки информации введены блок фильтров нижних частот, блок вычисления параметров ориентации, блок идентификации режимов движения зонда, блок вычисления координат, а также может содержать блок вычисления модуля ускорения и последовательно соединенные блок вычисления глубины погружения и вычислитель приращения длины скважины, и логическое устройство. Каждый маятниковый компенсационный акселерометр дополнительно содержит устройство переключения диапазонов и второй усилитель обратной связи. Устройство переключения диапазонов управляется выходным сигналом блока идентификации режимов движения зонда. 2 з.п. ф-лы, 6 ил.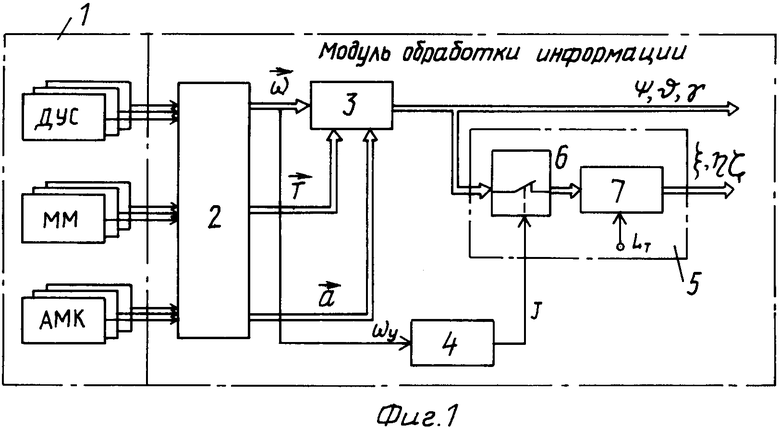
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авторское свидетельство, 1002551, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| SU, авторское свидетельство, 804822, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| FR, патент, 2541366, кл | |||
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
