Изобретение относится к точному приборостроению.
Целью способа является повышение точности за счет обеспечения возможности его осуществления в режиме с замкнутой обратной связью.
Указанная цель достигается тем, что в способе определения коэффициента качества динамически настраиваемого гироскопа, заключающемся в отклонении ротора при нерезонансной скорости его вращения по одной из осей чувствительности измерения изменения его параметров вычисления на основании полученных данных коэффициента качества, отклонение ротора производят по гармоническому закону с низкой частотой при замкнутой обратной связи, определяют изменение моментов по обеим осям чувствительности по изменению амплитуды низкочастотных колебаний токов обратной связи, а коэффициент качества F вычисляют по формуле:
где
ωр,ωн - соответственно резонансная и нерезонансная скорости вращения ротора;
Ω - круговая частота отклонения ротора;
kx, ky - крутизна по току каналов обратной связи по осям чувствительности x и y соответственно;
2Ix, 2Iy - размах колебаний токов в каналах обратной связи при низкочастотных колебаниях ротора относительно оси x гироскопа;
δω = ωр-ωн - величина расстройки.
Устройство, реализующее предложенный способ (ДНГ - с обратной связью по моменту) представлено на чертеже.
В режиме работы ДНГ с обратной связью по моменту сигналы с датчиком угла (ДУ) 1,2 подаются через предварительные усилители (ПУ) 3, 4, фазовые детекторы (ФД) 5, 6, усилители постоянного тока (УПТ) 7, 8, на датчики момента (ДМ) 9, 10 соответствующих каналов обратной связи (КОС).
Пусть с корпусом ДНГ связана правая система координат (СК) OXY. Вектор кинетического момента  направлен по положительному направлению оси O. На чертеже показаны статоры ДУ и ДМ соответствующих КОС. Здесь и ниже под осью ДУ понимается ось чувствительности ДУ, под осью ДМ - ось, по которой направлен вектор момента, развиваемый соответствующим ДМ (рассматривается магнитоэлектрический ДМ).
направлен по положительному направлению оси O. На чертеже показаны статоры ДУ и ДМ соответствующих КОС. Здесь и ниже под осью ДУ понимается ось чувствительности ДУ, под осью ДМ - ось, по которой направлен вектор момента, развиваемый соответствующим ДМ (рассматривается магнитоэлектрический ДМ).
На чертеже обозначены  - углы и угловые скорости отклонения ротора ДНГ относительно осей x и y соответственно. На чертеже также показано, что на вход соответствующего КОС может быть подано или постоянное напряжение смещения (как в способе-прототипе), или переменное, изменяющееся по гармоническому закону, например, по косинусу, которые обозначены в пересчете на углы отклонения ротора соответственно как
- углы и угловые скорости отклонения ротора ДНГ относительно осей x и y соответственно. На чертеже также показано, что на вход соответствующего КОС может быть подано или постоянное напряжение смещения (как в способе-прототипе), или переменное, изменяющееся по гармоническому закону, например, по косинусу, которые обозначены в пересчете на углы отклонения ротора соответственно как  для канала коррекции x и
для канала коррекции x и  для канала коррекции y. В какой канал (x или y) подается напряжение смещения - принципиального значения не имеет, поэтому в дальнейшем для примера взят канал y (смещение α
для канала коррекции y. В какой канал (x или y) подается напряжение смещения - принципиального значения не имеет, поэтому в дальнейшем для примера взят канал y (смещение α
Поскольку рассматривается магнитоэлектрический ДМ, а на чертеже условно показаны его статорные обмотки, то вектор момента, развиваемый ДМx при протекании тока в его статорных обмотках будет направлен вдоль оси x, хотя статоры ДМx расположены на оси OY. Соответственно, вектор момента, развиваемый ДМy, будет направлен вдоль оси y, как это показано на примере момента Eα0cosΩt для переменного смещения.
Схема работает следующим образом. Поскольку подается гармоническое смещение, примем для определенности без ущерба для общности, что в момент времени t=0 на вход УПТ подано отрицательное напряжение смещения, которое равно в пересчете на угол отклонения ротора  . ЭП вынуждена "отработать" возникший (мнимый) угол отклонения (сигнал смещения через УПТ поступает в виде постоянного тока на обмотку ДМy). Поэтому ЭП создаст момент E(-α
. ЭП вынуждена "отработать" возникший (мнимый) угол отклонения (сигнал смещения через УПТ поступает в виде постоянного тока на обмотку ДМy). Поэтому ЭП создаст момент E(-α будет стремиться совместиться с вектором внешнего момента по кратчайшему пути. Таким образом возникнет "истинный" угол отклонения ротора
будет стремиться совместиться с вектором внешнего момента по кратчайшему пути. Таким образом возникнет "истинный" угол отклонения ротора  (положительный). Отклонения ротора будет продолжаться до тех пор, пока напряжение с ДУy не с компенсирует поданное на вход УПТ напряжение смещения, или в пересчете на углы отклонения, пока угол
(положительный). Отклонения ротора будет продолжаться до тех пор, пока напряжение с ДУy не с компенсирует поданное на вход УПТ напряжение смещения, или в пересчете на углы отклонения, пока угол  не станет равным углу
не станет равным углу  . Поскольку напряжение смещения изменяется по гармоническому закону с низкой частотой Ω , то и ротор ДНГ будет вынужден совершать гармонические колебания относительно оси x с той же частотой.
. Поскольку напряжение смещения изменяется по гармоническому закону с низкой частотой Ω , то и ротор ДНГ будет вынужден совершать гармонические колебания относительно оси x с той же частотой.
В предположении, что в начальный момент времени (t=0) момент ЭП от поданного сигнала смещения направлен по отрицательной полуоси "y" КОС "y", прецессионные уравнения движения ДНГ будут иметь вид для нерезонансного режима работы (индексом "H" показывается, что скорость вращения ротора равна нерезонансной скорости)
где
Hн - кинетический момент при скорости  ;
;
τ - постоянная времени;
ΔKн - остаточная жесткость;
E - "жесткость" ЭП;
Ω - круговая частота сигнала смещения.
Токи тогда, протекающие в КОС, определяются из выражений ,
,
где
α*,β* - частное решение системы (1) при нулевых начальных условиях (считается, что переходный процесс завершен и производится измерение "установившихся" значений токов).
Решая известными методами систему (1), получим:
В реальных гироскопах всегда выполняются условия:
E ≫ λн, E ≫ ΔKн,
а для любого H подбором величины Ω можно обеспечить требование: E ≫ HΩ.
Тогда из (3) можно получить:
Представляя (4) в (2) получим
Как видно из (5), токи в КОС будут изменяться с частотой поданного низкочастотного сигнала смещения, причем ток в КОС "y", в который смещение подается, пропорционален величине гироскопического момента HнΩ, , а в перекрестном канале x - величине момента от остаточной жесткости ΔKн .
Поскольку удобнее регистрировать размах (удвоенную амплитуду) гармонических колебаний токов в КОС, то из (5) можно получить ,
,
где
2Ix, 2Iy - размахи колебаний токов в КОС x и y.
Подставляя полученное значение  в формулу 7
в формулу 7 (7)
(7)
где
C - осевой момент инерции ротора гироскопа,
an - экваториальный момент инерции карданной рамки,
получим формулу, характеризующую коэффициент качества
Таким образом, в предложенном способе определение отношения  производится в режиме с замкнутой обратной связью путем отклонения ротора по гармоническому закону с низкой частотой с измерением амплитуд изменений токов в каналах обратной связи, что позволяет повысить его точность.
производится в режиме с замкнутой обратной связью путем отклонения ротора по гармоническому закону с низкой частотой с измерением амплитуд изменений токов в каналах обратной связи, что позволяет повысить его точность.
Изобретение относится к точному приборостроению. Целью изобретения является повышение точности. Данный способ заключается в определении коэффициента качества гироскопа. Определение данного параметра осуществляется отклонением ротора, которое производят по гармоническому закону с низкой частотой при замкнутой обратной связи, при этом определяют изменение моментов по обеим осям чувствительности по изменению амплитуды низкочастотных колебаний токов обратной связи, а коэффициент качества вычисляют по формуле
где δω = ωр-ωн - величина расстойки, ωр,ωн - соответственно резонансная и нерезонансная скорости вращения ротора, Kx, y - крутизна по току каналов обратной связи DMx, DMy; 2Ix, 2Iy - размах колебаний (удвоенные амплитуды) токов в цепях обратной связи x и y при отклонении ротора по гармоническому закону с низкой частотой относительно оси x. 1 ил.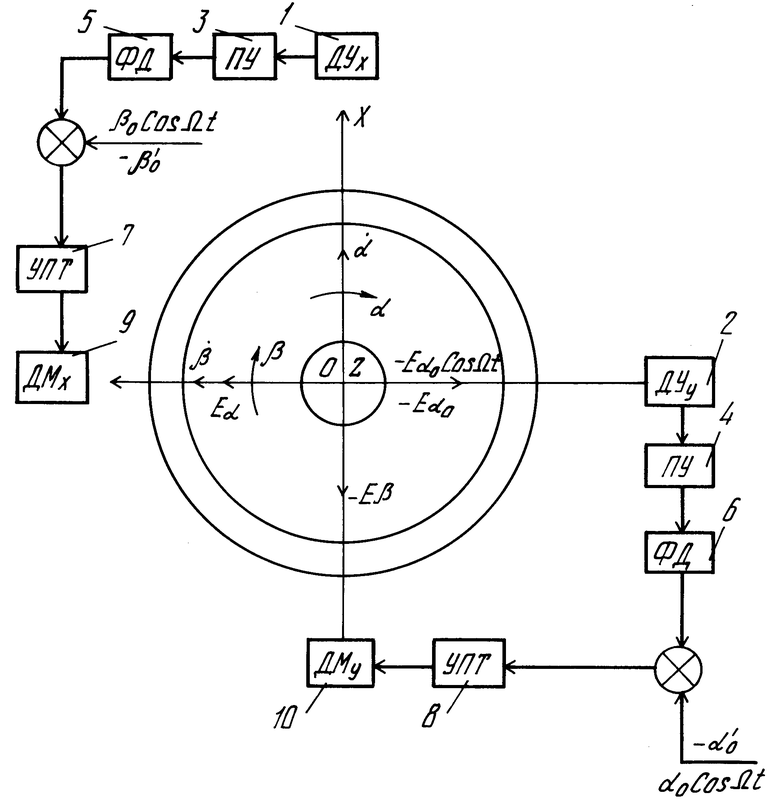
Способ определения коэффициента качества динамически настраиваемого гироскопа, заключающийся в отклонении ротора при нерезонансной скорости его вращения по одной из осей чувствительности, измерении изменения его параметров и вычислении на основании полученных данных коэффициента качества, отличающийся тем, что, с целью повышения точности, отклонение ротора производят по гармоническому закону с низкой частотой при замкнутой обратной связи, определяют изменение моментов по обеим осям чувствительности по изменению амплитуды низкочастотных колебаний токов обратной связи, а коэффициент качества Fm вычисляют по формуле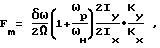
где
ωр, ωн - соответственно резонансная и нерезонансная скорости вращения ротора;
Ω - круговая частота отклонения ротора;
Кх, Ку - крутизна по току каналов обратной связи по осям чувствительности х и y соответственно;
2Ix, 2Iy - размах колебаний токов в каналах обратной связи при низкочастотных колебаниях ротора относительно оси х гироскопа;
δω = ωр-ωн - величина расстройки.
