Изобретение относится к точному приборостроению, преимущественно гироскопическому, и может быть использовано при создании гирокомпасов и курсоуказывающих устройств аналитического типа.
Известен способ аналитического гирокомпасирования с помощью гироскопического датчика угловой скорости (см., например, книгу В.И. Назарова и Г.А. Хлебникова "Гиростабилизаторы ракет". М., 1975, с. 191-196) согласно которому курсовое направление измерительной оси гироскопа определяют аналитически путем вычислений по результатам измерений горизонтальной составляющей угловой скорости вращения Земли. Для определения курса делают несколько поворотов гироскопа с азимутальной плоскостью с последующим измерением выходных сигналов датчика угловой скорости в этих угловых положениях, которые затем используют для аналитического вычисления курса. При этом отмечено, что одним из факторов, обуславливающим погрешность определения курса, является неточность разворота гироскопа в азимутальной плоскости на заданные углы, которых может быть два, три четыре и более.
За прототип взят способ аналитического гирокомпасирования с помощью гироскопического датчика угловой скорости (см. статью S.P.Redkin "Analytical gyrocompassing by angular rate sensor based on dynamically tuned gyro". Saint Petersburg International Conference on Gyroscopic technology, May 1994).
В этом способе проводят предварительную настройку по выставке измерительных осей гироскопа в горизонт и привязке их к продольной оси объекта, включают гироскоп в режим работы с обратной связью по току датчика момента, определяют сигнал с эталонного сопротивления датчика угловой скорости в первом положении на угле измеряемого курса, поворачивают гироскоп в азимуте во второе положение вокруг собственной оси на 180 градусов, а затем в третье положение на 90 градусов и измеряют сигналы с гироскопа на этих углах, после чего искомый угол находят аналитически с использованием значений сигнала с эталонного сопротивления, полученных на этих углах, с помощью следующего соотношения
где
Ux1, Ux2, Ux3 - напряжения с эталонного сопротивления датчика угловой скорости соответственно в первом, втором и третьем положениях.
Известный способ аналитического гидрокомпасирования позволяет производить автокомпенсацию ряда погрешностей, обусловленных систематическими составляющими моментов, не связанных с корпусом гироскопа. Однако в данном способе не компенсируются погрешности, обусловленные разворотом гироскопа в азимуте на заданные углы. Погрешность определения курса в известном способе, реализованном с помощью ДУС на базе динамически настраиваемого гироскопа (ДНГ), в соответствии с исследованиями, проведенными в статье S.P. Redkin "Analytical gyrocompassiny by angular rate sensor based on dynamically tuned gyro", опубликованной в сборнике докладов "Saint Peterbury International Conference on Gyroscopic technology, May 1994, можно представить в следующем виде ,
,
где ,
,
где
Δψ - погрешность определения курса;
ψ - угол истинного курса;
υ,κ - углы тангажа и крена;
αб,βб,γб - углы, характеризующие погрешность установки корпуса гироскопа на базе ДУС на объекте;
αнп,βнп,γнп - углы, характеризующие погрешность установки поворотной платформы гироскопа в корпусе гирокомпаса.
 ,
,
где:
U - угловая скорость вращения Земли;
ϕ - широта места;
K* - остаточная жесткость ДНГ;
δ2,δ3 - погрешность азимутального поворота гироскопа на заданные углы;
Ky - коэффициент усиления контура обратной связи гироскопа
Kу = Kдм Kус Kду;
Kду - крутизна датчика угла поворота;
Kус - коэффициент усиления усилителя обратной связи;
Kдм - крутизна датчика момента гироскопа; λ=TD+n1•N1D
Tд - момент сил аэродинамического сопротивления вращению ротора;
D - коэффициент демпфирования;
n1 - количество карданных рамок ДНГ;
N1 - скорость вращения ротора гироскопа;
H1 - кинетический момент гироскопа;
M
ΔM
ΔM
ΔM
rz - смещение центра масс ротора гироскопа вдоль оси собственного вращения;
g - ускорение свободного падения.
С помощью выражения (2) была рассчитана погрешность определения курса при следующих типичных параметрах:
H1 = 180 гсмс, K* = 0,3 гсм/рад, Kу = 200 гсм/рад, r2g = 8,6 • 10-4 гсм, .
.
При этом δ2=δ3 и изменялись в диапазоне ± 0,0872 рад.
На фиг. 1 показана расчетная зависимость погрешности определения курса от величины погрешности азимутального поворота гироскопа на заданные углы от курсового угла ψ = 90o.
Из зависимости, представленной на фиг. 1, следует, что в известном способе определения курса имеет место существенная погрешность, обусловленная неточностью азимутального поворота гироскопа на заданные углы. Точность поворота гироскопа на заданные азимутальные углы обусловлена точностью применяемого устройства углового позиционирования гироскопа.
В имеющихся образцах аналитических гирокомпасов погрешность азимутального поворота гироскопа может достигать ± 30 угловых минут, что обуславливает погрешность определения курса ± 0,008734 рад.
Целью настоящего изобретения является повышение точности аналитического гирокомпасирования с помощью гироскопического датчика угловой скорости.
Поставленная цель достигается тем, что в известном способе аналитического гирокомпасирования с помощью гироскопического датчика угловой скорости, включающем предварительную выставку измерительных осей гироскопа в горизонт и их привязку к продольной оси объекта, работу гироскопа в режиме обратной связи по току датчика момента, поворот корпуса в азимуте на заданные углы, определяющие при этом сигнал с эталонного сопротивления гироскопа на заданных углах азимутального поворота и аналитическое вычисление курса с использованием полученных на заданных азимутальных углах сигналов с гироскопа, а определение сигнала с эталонного сопротивления гироскопа на заданных азимутальных углах его поворота проводят путем поворота корпуса гироскопа на эти углы, число которых выбирается нечетным, не менее трех, измеряют полученные фактические углы азимутального поворота корпуса гироскопа и соответствующие этим углам фактические сигналы с эталонного сопротивления гироскопа, а значения сигналов с эталонного сопротивления гироскопа, соответствующих заданным углам поворота, вычисляют по формуле: ,
,
где
u(γj) - сигнал с эталонного сопротивления гироскопа на заданном угле γj его азимутального поворота;
γj - заданный азимутальный угол поворота гироскопа;  ;
;
m - число заданных азимутальных углов поворота гироскопа, требующееся для принятого алгоритма вычисления курсового угла;
u*(γ
γ ;
;
N = 2n + 1 - нечетное число фактических азимутальных углов поворота гироскопа.
По алгоритму известного способа задается желаемый азимутальный поворот гироскопа на угол γj . В результате погрешности углового позиционирования, обусловленного погрешностями устройства, реализующего эти повороты, гироскоп поворачивается на фактический угол γ
γ
где
Δγi - погрешность углового позиционирования гироскопа.
Устройство углового позиционирования гироскопа имеет в своем составе измеритель угла поворота гироскопа, исполнительный элемент в виде двигателя и электронного устройства, управляющего движением поворотной платформы, на которой установлен гироскоп. Датчик угла поворота выбирается исходя из требуемой точности поворота на желаемые заданные углы, и практически выбор и конструктивная реализация позволяют удовлетворять эти требования. Погрешность позиционирования обусловлена главным образом погрешностью остальных узлов устройства углового позиционирования гироскопа. Пусть в результате поворота гироскопа в азимуте имеется нечетное число N = 2n + 1 измерений сигнала ДУС на фактических углах γ
u*(γ
При определении истинного курса по известному способу необходимо использовать значения u*(γ*) для промежуточного значения аргумента, то есть на желаемых задаваемых углах поворота.
В этом случае построим функцию u(γ), которая в узловых точках γ
Условия, налагаемые приближением, можно записать в виде
Рассмотрим равенства (3) и равенства (2) как систему однородных линейных алгебраических уравнений относительно коэффициентов при 1, cos kγ, sinkγ, coskγ
Эта система имеет нетривиальное решение. Следовательно, определитель системы равен нулю.

Раскрывая этот определитель по элементам первого столбца, получим:
u(γ)Δ-u*(γ
Из выражения (5) после соответствующих преобразований можно представить u(γ) для дискретных значений γj в следующем виде ,
,
где
u(γj) - сигнал с эталонного сопротивления гироскопа на заданном угле γj его азимутального поворота;
γj - заданный азимутальный угол поворота гироскопа,  ;
;
u*(γ
γ ;
;
N = 2n + 1 - нечетное число фактических азимутальных углов поворота гироскопа.
Таким образом, предлагаемый способ аналитического гирокомпасирования с помощью гироскопического датчика угловой скорости имеет следующее основное отличие от известного способа: в операции определения сигнала с эталонного сопротивления гироскопа на заданных азимутальных углах его поворота сначала определяют промежуточные значения сигналов на полученных фактических углах поворота гироскопа, а затем в результате приближения на основе измеренных фактических углов поворота и соответствующих им сигналов с гироскопа определяют с помощью аналитической зависимости сигнала с гироскопа на желаемых задаваемых углах азимутального поворота.
На фиг. 1 показана теоретическая зависимость погрешности определения истинного курса от погрешности задания азимутальных углов поворота гироскопа на курсовом угле ψ = 90o.
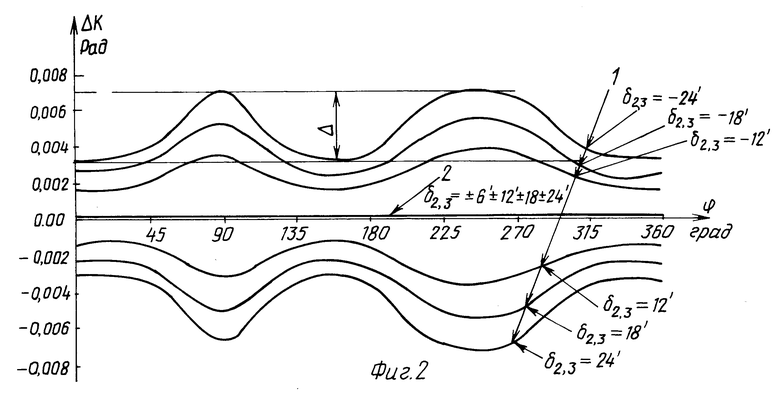
На фиг. 2 показана зависимость погрешности определения истинного курса при различных погрешностях δ2,3 задания азимутальных углов поворота гироскопа в случае известного и предлагаемого способа.
С помощью компьютера проводилось сравнительное моделирование погрешности определения курса известным и предлагаемым способами.
На фиг. 2 показаны зависимости 1 и 2 погрешности определения истинного курса при различных погрешностях δ2,3 задания азимутальных углов поворота гироскопа соответственно в случае известного и предлагаемого способа. Из сравнения этих зависимостей видно, что применение предлагаемого способа позволяет существенно повысить точность определения истинного курса по сравнению с известным способом.
Так, в известном способе при изменении курса в диапазоне углов [0,2π] курсовая погрешность изменяется в пределах трубки шириной Δ = 0,0035 рад при погрешности углового позиционирования гироскопа в азимуте 24 угловые минуты, а при применении предлагаемого способа погрешность определения курса при этом практически отсутствует.
Использование предлагаемого способа аналитического гирокомпасирования с помощью гироскопического датчика угловой скорости обеспечивает по сравнению с существующим способом существенное повышение точности его определения.
При этом применение предлагаемого способа уменьшает стоимость разработки и конструкции гироскопа за счет уменьшения требований к точности устройства узлового позиционирования гироскопа в азимуте.
Способ аналитического гирокомпасирования может быть использован при создании гирокомпасов аналитического типа. Для аналитического гирокомпасирования с помощью гироскопического датчика угловой скорости поворачивают корпус гироскопа на фактические азимутальные углы, отличающиеся от требуемых заданных углов на величину погрешности углового позиционирования гироскопа. Число фактических углов поворота должно быть нечетное в количестве не менее трех. Измеряют полученные фактические углы азимутального поворота гироскопа и соответствующие этим углам фактические сигналы с эталонного сопротивления гироскопа. Аналитически вычисляют курс с использованием значений заданных азимутальных углов поворота гироскопа и значений сигналов с эталонного сопротивления гироскопа соответствующих заданным углам поворота, которые определяют по предложенному аналитическому выражению. 2 ил.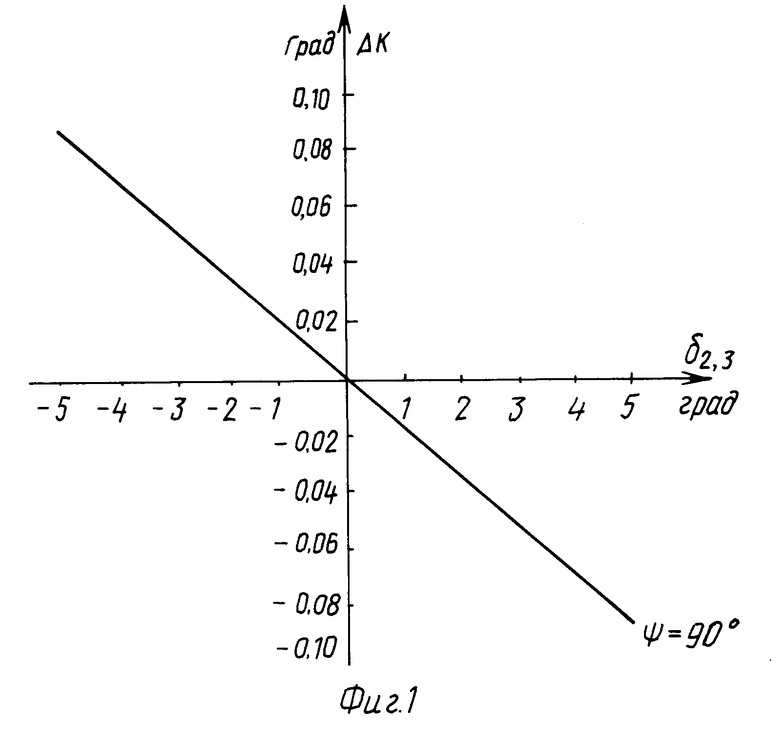
Способ аналитического гирокомпасирования с помощью гироскопического датчика угловой скорости, включающий предварительную выставку измерительных осей гироскопа в горизонт и их привязку к продольной оси объекта, работу гироскопа в режиме обратной связи по току датчика момента, поворот корпуса гироскопа в азимуте на заданные углы, определение при этом сигнала с эталонного сопротивления гироскопа на заданных углах азимутального поворота и аналитическое вычисление курса с использованием полученных на заданных азимутальных углах сигналов с эталонного сопротивления гироскопа, отличающийся тем, что определение сигнала с эталонного сопротивления гироскопа на заданных азимутальных углах его поворота проводят путем поворота корпуса гироскопа на эти углы, число которых выбирается нечетным не менее трех, измеряют полученные фактические углы азимутального поворота корпуса гироскопа и соответствующие этим углам фактические сигналы с эталонного сопротивления гироскопа, а значения сигналов с эталонного сопротивления гироскопа, соответствующих заданным углам поворота, вычисляют по формуле
где u(γj) - - сигнал с эталонного сопротивления гироскопа на заданном угле γj его азимутального поворота;
γj- заданный азимутальный угол поворота гироскопа j = 1, m,
m - число заданных азимутальных углов поворота гироскопа, требующееся для принятого алгоритма вычисления курсового угла;
u*(γ
γ
N = 2n + 1 - нечетное число фактических азимутальных углов поворота гироскопа.
| RU, патент, 2051330, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| RU, заявка, 94005560, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| RU, патент, 2000542, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| S.P.REDKIN | |||
| ANALYTICAL GYROCOMPASSING BY ANGULAR RATE SENSOR BASED ON DYNAMICALLY TUNED GYRO.I SAINT PETERSBURG INTERNATIONAL CONFERENCE ON GYROSCOPIC TECHNOLOGY | |||
| Прибор для охлаждения жидкостей в зимнее время | 1921 |
|
SU1994A1 |
