Изобретение относится к области приборостроения и может применяться в лазерных гироскопах (ЛГ) с виброподставкой (ВП). Задачей, на которую направлено данное изобретение, является повышение точностных характеристик бесплатформенных инерциальных навигационных систем (БИНС) на основе лазерных гироскопов с виброподставкой за счет исключения зависимости выдачи выходной информации ЛГ об угле поворота в абсолютном пространстве от частоты движений ВП.
Из уровня техники известен способ определения параметров относительных крутильных колебаний кольцевого лазера (КЛ) с виброподставкой (ВП) в лазерном гироскопе [1], при котором параметры относительных крутильных колебаний КЛ определяют по реперным положениям, в качестве которых выбраны точки с нулевой скоростью вращения КЛ в абсолютном пространстве. В моменты смены направления вращения КЛ производится обработка информации ЛГ, при этом показания накапливаются только за целое число периодов колебаний КЛ. Суммарный угол относительного поворота КЛ за один период колебаний, обусловленный ВП, равен нулю, в связи с чем, составляющая этих колебаний в выходном сигнале ЛГ исключается.
Из уровня техники известно устройство лазерного гироскопа [1], содержащего кольцевой лазер с виброподставкой. В данном устройстве параметры относительных крутильных колебаний КЛ определяются по реперным положениям, в качестве которых электронная схема выделяет моменты смены направления вращения КЛ из преобразованных выходных сигналов фотодетектора ЛГ и генерирует соответствующие управляющие сигналы для системы обработки информации ЛГ. В результате работы устройства гироскоп накапливает показания только за целое число периодов колебаний КЛ. Суммарный угол относительного поворота КЛ за один период колебаний, обусловленный ВП, равен нулю, в связи с чем, составляющая этих колебаний в выходном сигнале ЛГ исключается.
Недостатком известного из [1] способа и устройства является низкая частота получения выходного сигнала ЛГ, ограниченная частотой колебаний КЛ.
Из уровня техники известен также способ компенсации составляющей крутильных колебаний кольцевого лазерного гироскопа [2], при котором относительное угловое положение КЛ определяют по параметрам оптико-электронной системы и вычитают из абсолютного углового положения, полученного в результате цифровой обработки сигналов кольцевого лазера.
Из уровня техники известно также устройство лазерного гироскопа [2], в состав которого, кроме кольцевого лазера и виброподставки, входит датчик параметров относительных крутильных колебаний, выполненный в виде оптико-электронной схемы. Для компенсации составляющей крутильных колебаний кольцевого лазера, вносимой виброподставкой, его относительное угловое положение, определенное по сигналам оптико-электронной схемы, при помощи блока компенсации вычитают из абсолютного углового положения, формируемого блоком обработки сигналов кольцевого лазера.
Недостатком известного из [2] способа и устройства является необходимость введения в конструкцию лазерного гироскопа дополнительных устройств, в том числе оптико-электронной схемы определения смещения положения виброподставки, что существенно усложняет технологию изготовления ЛГ и приводит к нежелательным изменениям массогабаритных характеристик и характеристик устойчивости к внешним воздействиям.
Наиболее близким к заявляемому способу компенсации движения виброподставки лазерного гироскопа является известный из уровня техники способ вычета вибрации кольцевого лазерного гироскопа [3] за счет схемы, которая воспринимает аналоговый сигнал вибродвижения, преобразовывает его в цифровой вид и компенсирует замкнутой системой для регулирования усиления сигнала вибрации. Сигнал вибрации сравнивают с определенным значением и получают сигнал рассогласования. Для компенсации вибродвижения сигнал вибрации вычитают из считанной из лазера информации. Полученный компенсированный сигнал обрабатывают и используют для управления усилением замкнутого контура.
Наиболее близким к заявляемому устройству для реализации способа компенсации движения виброподставки лазерного гироскопа является известное из уровня техники устройство для вычета вибрации кольцевого лазерного гироскопа [3], содержащее схему на базе микроконтроллера, которая воспринимает аналоговый сигнал вибродвижения. Аналоговый сигнал вибрации преобразовывается в цифровой вид и замкнутой системой микроконтроллера компенсируется для регулирования усиления сигнала вибрации. Формируется сигнал рассогласования путем сравнения сигнала вибрации с определенным значением. В устройстве вычитания вибрации для компенсации вибродвижения сигнал вибрации вычитают из считанной из лазера информации. С помощью обработки компенсированного сигнала выполняют функции управления усилением замкнутого контура.
Недостатком известного из [3] способа и устройства является потребность в постоянной регулировке усиления сигнала вибрации, которая вносит ошибку в компенсированный сигнал.
Технической проблемой, на решение которой направлено данное изобретение, является разработка способа компенсации движения виброподставки лазерного гироскопа, а также устройства для его реализации, исключающих зависимость выдачи выходной информации лазерного гироскопа об угле поворота в абсолютном пространстве от частоты колебаний виброподставки и повышающих точностные характеристики бесплатформенных инерциальных навигационных систем на основе лазерных гироскопов с виброподставкой.
Техническая проблема изобретения решена за счет того, что в предлагаемом способе компенсации движения виброподставки лазерного гироскопа выходные сигналы кольцевого лазера и датчика положения (ДП) поступают на преобразователь, преобразующий их в цифровой вид, а далее на компенсатор, в котором в моменты получения информации об угловом положении лазерного гироскопа осуществляется вычет составляющей, вносимой движением виброподставки, из абсолютного углового положения кольцевого лазера, относительно опорных точек, определяемых датчиком положения, в положениях, при которых составляющая, вносимая виброподставкой, отсутствует, с учетом задержки сигнала датчика положения от движения кольцевого лазера, при этом используются закономерность колебаний кольцевого лазера и параметры лазерного гироскопа: период и амплитуда колебаний кольцевого лазера, время запаздывания движения датчика положения от движения кольцевого лазера, время между нулевым положением датчика положения, соответствующим смене знака амплитуды с отрицательного на положительное, и требуемым моментом получения информации об угловом положении лазерного гироскопа.
Техническая проблема изобретения также решена за счет того, что предлагаемое устройство для реализации способа компенсации движения виброподставки лазерного гироскопа представляет собой лазерный гироскоп, содержащий кольцевой лазер с виброподставкой, датчиком положения, преобразователем, на который поступают выходные сигналы от кольцевого лазера и датчика положения, преобразованные сигналы с преобразователя поступают на компенсатор, выполняющий вычет составляющей, вносимой движением виброподставки, из абсолютного углового положения кольцевого лазера, при этом компенсатор включает в себя тактовый генератор, счетчик, два квадратурных счетчика, шесть блоков захвата, блок сдвига фазы, и арифметический блок.
Техническим результатом, как способа, так и устройства является повышение точностных характеристик БИНС на базе лазерных гироскопов с виброподставкой.
В предложенном способе это достигается за счет вычета составляющей, вносимой движением ВП, с использованием параметров, определяемых во время работы ЛГ, с учетом запаздывания движения ДП от движения КЛ.
В предложенном устройстве это достигается за счет введения компенсатора, исполненного на микроконтроллере, который одновременно обеспечивает функционирование лазерного гироскопа без ухудшения массогабаритных характеристик ЛГ.
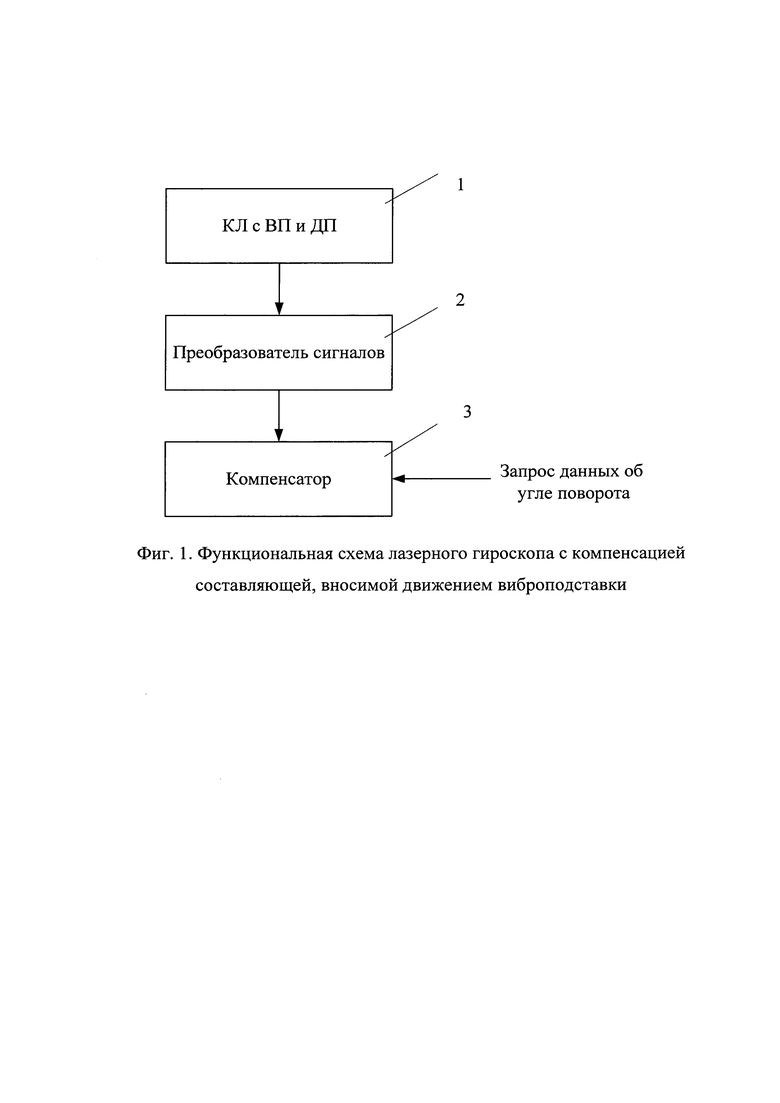
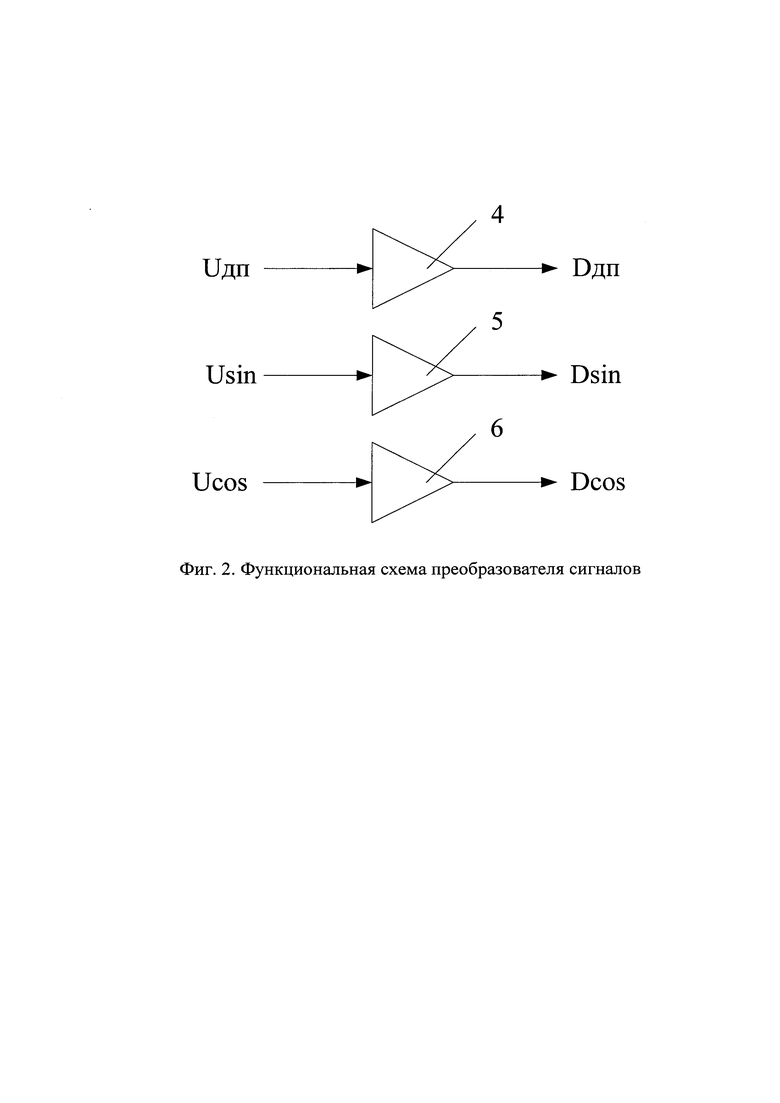
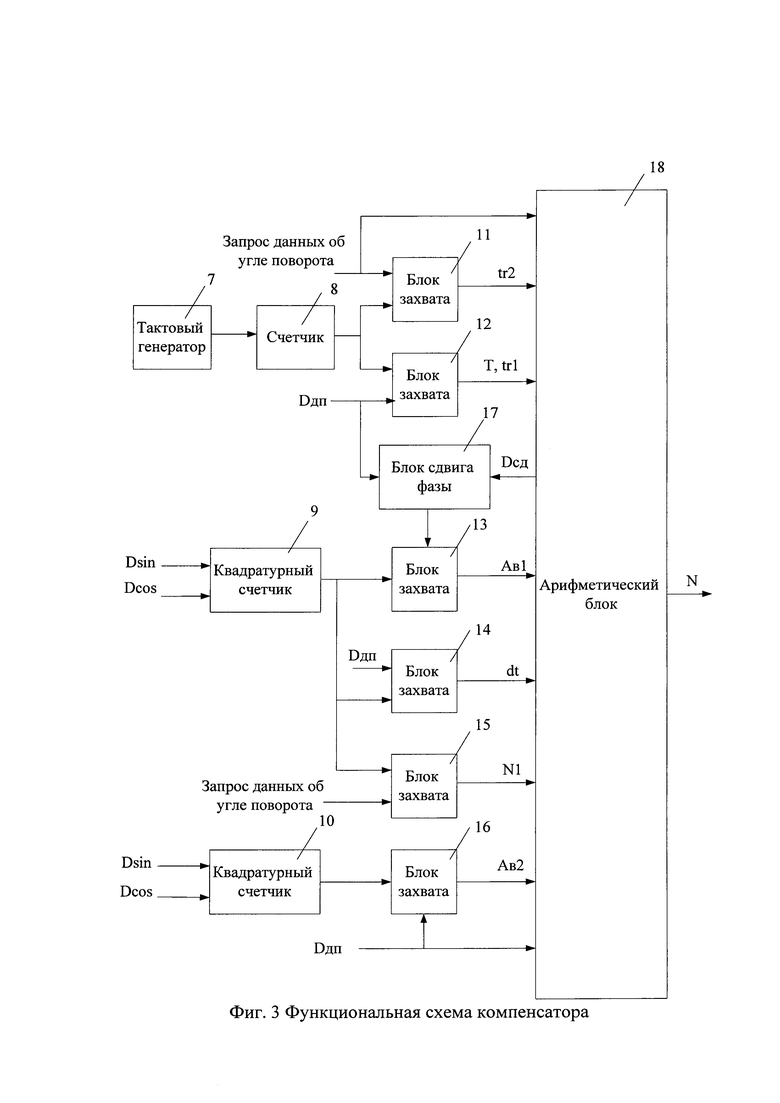
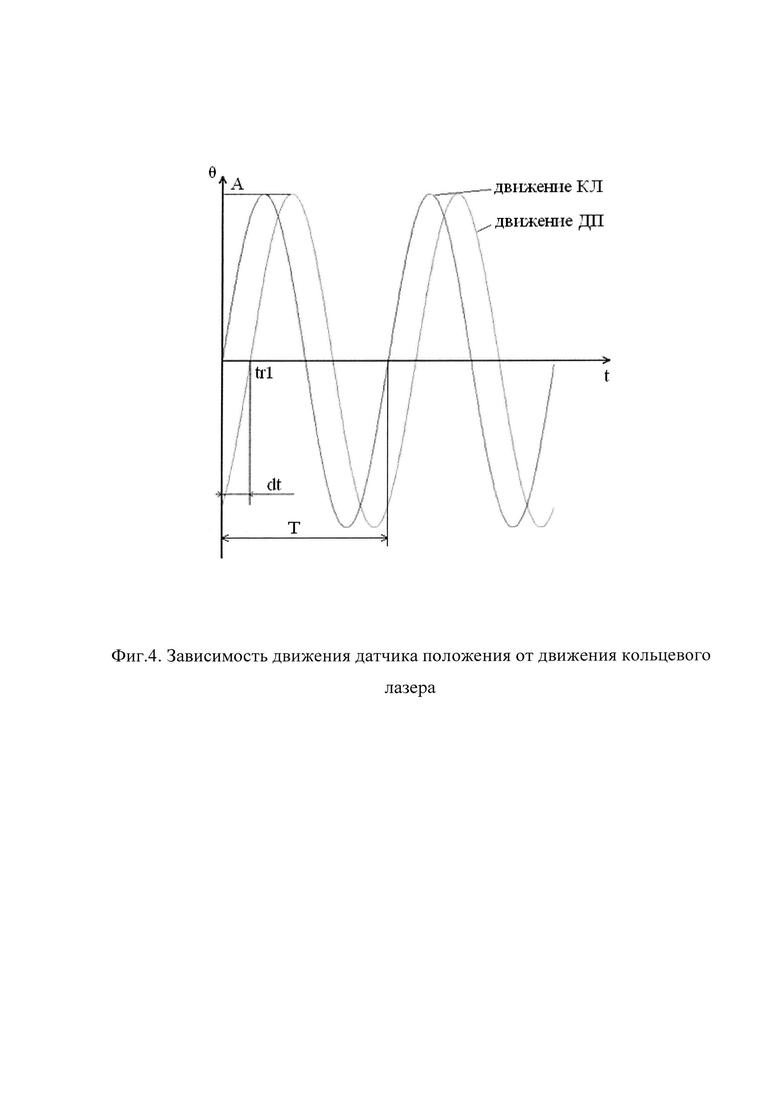
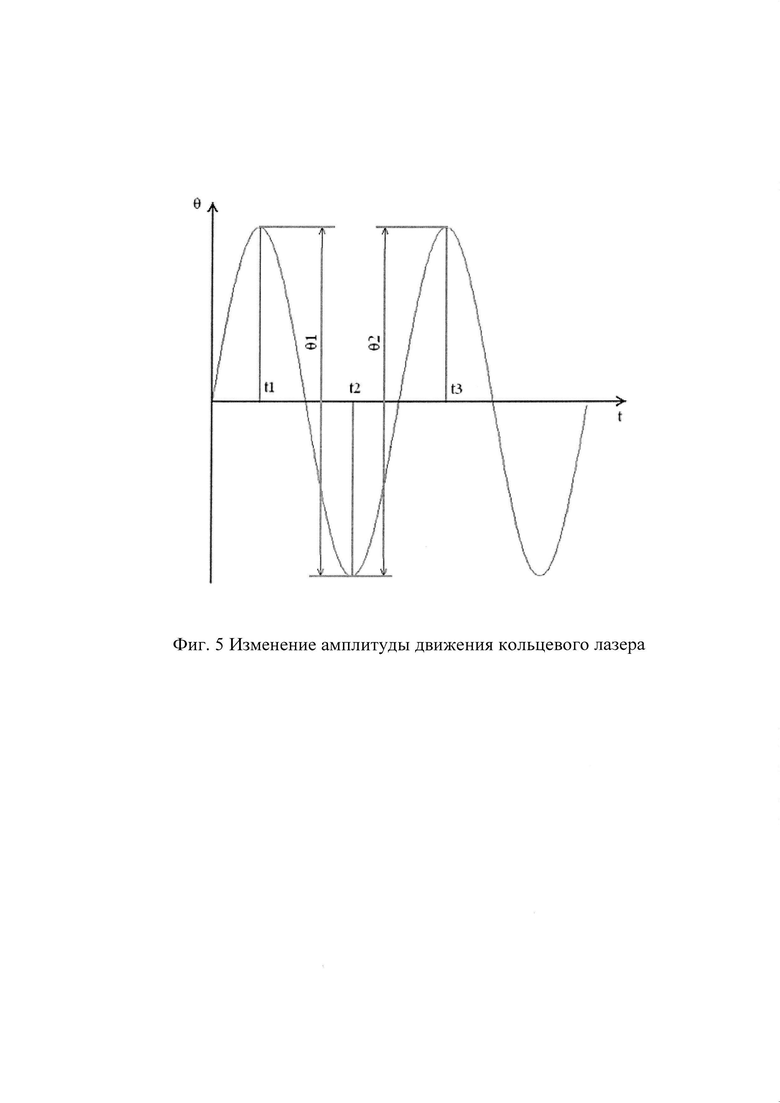
Изобретение иллюстрируется чертежами, где на фиг. 1 изображена функциональная схема лазерного гироскопа с компенсацией составляющей, вносимой движением виброподставки; на фиг. 2 изображена функциональная схема преобразователя сигналов; на фиг. 3 изображена функциональная схема компенсатора; на фиг. 4 изображена зависимость движения ДП от движения КЛ; на фиг. 5 изображено изменение амплитуды движения КЛ.
На чертежах указаны следующие позиции: 1 - кольцевой лазер с виброподставкой и датчиком положения; 2 - преобразователь сигналов; 3 - компенсатор; 4-6 - компараторы; 7 - тактовый генератор; 8 - счетчик; 9 - квадратурный счетчик; 10 - квадратурный счетчик; 11-16 - блоки захвата; 17 - блок сдвига фазы; 18 - арифметический блок;
Способ компенсации движения виброподставки лазерного гироскопа осуществляется следующим образом. Кольцевой лазер в лазерном гироскопе выполняет крутильные колебания, вызываемые виброподставкой, близкие к синусоидальным с амплитудой А и периодом Т, которые можно представить в виде:

В моменты получения информации об угловом положении лазерного гироскопа в компенсаторе 3 выполняется вычет составляющей, вносимой движением ВП, из абсолютного углового положения КЛ относительно опорных точек, определяемых датчиком положения, в положениях, при которых составляющая, вносимая ВП, отсутствует с учетом задержки сигнала ДП от движения КЛ.
Способ компенсации движения виброподставки лазерного гироскопа реализуется следующим образом. В лазерном гироскопе (фиг. 1), содержащем кольцевой лазер с виброподставкой и датчиком положения 1, выходные данные, как и в выше описанных изобретениях, поступают на преобразователь сигналов 2 (фиг. 2), в котором на компараторах 5 и 6 осуществляют преобразование квадратурного сигнала Usin и Ucos с КЛ в квадратурный сигнал цифрового вида Dsin и Dcos, несущий информацию об абсолютном угловом положении КЛ в масштабе реального времени, и на компараторе 4 преобразование выходного сигнала датчика положения Uдп в цифровой вид Dдп, фронты которого совпадают с моментами нулевого положения ДП, соответствующими смене знака амплитуды с отрицательного на положительное, и являются опорными точками для вычета составляющей, вносимой ВП. Отличием от прототипа является то, что выходные сигналы с преобразователя 2 поступают на компенсатор 3 (фиг. 3), который включает в себя тактовый генератор 7, являющийся задающим для определения времени, счетчик 8, осуществляющий счет только на увеличение, квадратурный счетчик 9, осуществляющий работу в режиме квадратурного счета, квадратурный счетчик 10, осуществляющий счет только на увеличение, блоки захвата 11-16, осуществляющие в необходимые моменты времени захват значений счетчиков, блок сдвига фазы 17, осуществляющий формирование сигнала, сдвинутого на 90°, относительно сигнала датчика положения Dдп с учетом запаздывания движения датчика положения Dсд от движения КЛ, арифметический блок 18, осуществляющий вычет составляющей, вносимой виброподставкой, из информации абсолютного углового положения ЛГ, и осуществляет определение амплитуды А и периода Т крутильных колебаний КЛ, определение запаздывания dt (2) движения ДП от движения КЛ (фиг. 4), определение значения времени tr между опорной точкой tr1 (фиг. 4) и требуемым моментом получения информации об угловом положении лазерного генератора tr2 (3), захват информации N1 абсолютного углового положения ЛГ в требуемый момент времени запроса информации, формирование выходной информации N об угловом положении ЛГ (4) с учетом вычета составляющей, вносимой движением ВП. Компенсатор 3 выполнен на базе микроконтроллера, обеспечивающего также функционирование ЛГ.
Для определения периода крутильных колебаний кольцевого лазера Т и значения времени опорных точек tr1 используются тактовый генератор 7 и счетчик 8. Блоком захвата 12 по сигналу датчика положения Dдп производится захват значений из счетчика 8, являющихся временем для опорных точек tr1. Периодом крутильных колебаний кольцевого лазера Т является разница между значениями времени соседних опорных точек.
Амплитуда крутильных колебаний кольцевого лазера А определяется по двум вариантам. В первом варианте определения амплитуды цифровые сигналы Dsin и Dcos являются входными для квадратурного счетчика 9, значения которого захватываются в блоке захвата 13 по сигналу, формируемому в блоке сдвига фазы 17. За время равное периоду колебания КЛ в промежутках между максимальными противоположными отклонениями КЛ накапливаются две противоположных по знаку величины 01 и 02, соответствующие углу отклонения КЛ от правого крайнего положения до левого крайнего и обратно (фиг. 5), модуль разности между которыми составляет четырехкратную амплитуду крутильных колебаний КЛ. Во втором варианте определения амплитуды цифровые сигналы Dsin и Dcos являются входными для квадратурного счетчика 10, значения которого захватываются в блоке захвата 16 по фронту цифрового сигнала датчика положения Dдп. За период колебания КЛ осуществляется одно измерение, за которое при условии не превышения величины внешней скорости значения скорости, создаваемой движением ВП, накапливается четырехкратное значение амплитуды. Влияние ошибки определения амплитуды крутильных колебаний КЛ при компенсации движения виброподставки лазерного гироскопа, уменьшается с увеличением внешней скорости, вследствие чего, при величине внешней скорости, не превышающей значения скорости, создаваемой движением ВП, для определения достоверного значения амплитуды колебаний КЛ, применяются одновременно два варианта.
Для определения запаздывания движения ДП от движения КЛ цифровые сигналы Dsin и Dcos поступают на квадратурный счетчик 9, значения которого захватываются в блоке захвата 14 по сигналу датчика положения Dдп каждые полпериода в моменты времени, соответствующие нулевым положениям ДП (фиг. 4). За период ВП осуществляют два измерения с противоположными по знаку результатами, модуль разности которых составляет четырехкратную величину запаздывания движения ДП от движения кольцевого лазера Z. Преобразование запаздывания движения ДП от движения кольцевого лазера во временной интервал dt производится следующим образом:

Для определения времени требуемого момента получения информации об угловом положении лазерного гироскопа tr2 значения счетчика 8 захватываются в блоке захвата 11 по внешнему сигналу запроса данных об угле поворота, формируемому потребителем. Время между опорной точкой tr1 и требуемым моментом времени получения информации об угловом положении лазерного гироскопа tr2, инициируемым потребителем, определяют следующим образом:

где tr1 - время опорных точек, которое определяется при определении периода колебаний КЛ.
Формирование информации об угловом положении ЛГ с учетом вычета составляющей, вносимой движением ВП, осуществляют в арифметическом блоке 18 с использованием выражения следующего вида:

Таким образом, предложенные способ и устройство устраняют зависимость выдачи выходной информации ЛГ об угле поворота в абсолютном пространстве от частоты ВП, не увеличивая массогабаритные характеристики ЛГ и позволяя повысить точностные характеристики БИНС.
Источники информации
[1] Патент США US 3627425, 14.12.1971, МПК G01C 19/66.
[2] Авиев А.А., Болотнов С.А., Енин В.Н. Лазерный гироскоп с компенсацией составляющей, вносимой виброподставкой // Патент России № 2613043. 2017. Бюл. № 8.
[3] Патент США US 5249031, 28.09.1993, МПК G01C 19/68.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ГИРОСКОП С КОМПЕНСАЦИЕЙ СОСТАВЛЯЮЩЕЙ, ВНОСИМОЙ ВИБРОПОДСТАВКОЙ | 2015 |
|
RU2613043C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ УГЛОВОЙ ОРИЕНТАЦИИ ПОДВИЖНОГО ОБЪЕКТА И ЛАЗЕРНЫЙ ИЗМЕРИТЕЛЬНЫЙ БЛОК | 1996 |
|
RU2112926C1 |
| Устройство для настройки датчика угловых скоростей лазерного | 2020 |
|
RU2737027C1 |
| Способ оценки систематических дрейфов трехосного лазерного гироскопа с виброподставкой | 2019 |
|
RU2748030C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ДИНАМИЧЕСКИЙ ГИРОКОМПАС | 2020 |
|
RU2754964C1 |
| СПОСОБ ПРЕЦИЗИОННОЙ ОБРАБОТКИ СИГНАЛОВ ЛАЗЕРНОГО ГИРОСКОПА | 2014 |
|
RU2571437C1 |
| СПОСОБ ДИНАМИЧЕСКОГО ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1997 |
|
RU2127867C1 |
| ИНЕРЦИАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО С ЦИФРОВЫМ СРЕДСТВОМ УПРАВЛЕНИЯ | 2019 |
|
RU2731656C1 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2217692C2 |
| Способ юстировки кольцевых резонаторов лазерных гироскопов | 2015 |
|
RU2616348C2 |
Изобретение относится к области приборостроения и касается лазерного гироскопа с компенсацией составляющей, вносимой виброподставкой (ВП). Способ компенсации движения ВП лазерного гироскопа состоит в том, что выходные сигналы кольцевого лазера (КЛ) и датчика положения поступают на преобразователь, в котором сигналы преобразуют в цифровой вид. Преобразованные сигналы с преобразователя поступают в компенсатор, в котором в моменты получения информации об угловом положении лазерного гироскопа осуществляют вычет составляющей, вносимой движением ВП, из абсолютного углового положения КЛ, относительно опорных точек, определяемых датчиком положения, в положениях, при которых составляющая, вносимая ВП, отсутствует, с учетом задержки сигнала датчика положения от движения КЛ. При этом используют закономерности колебаний КЛ и параметров лазерного гироскопа: периода и амплитуды колебаний КЛ, времени запаздывания движения датчика положения от движения КЛ, времени между нулевым положением датчика положения, соответствующим смене знака амплитуды с отрицательного на положительное, и требуемым моментом получения информации об угловом положении лазерного гироскопа. Лазерный гироскоп содержит КЛ с ВП, датчиком положения, преобразователем, на который поступают выходные сигналы от КЛ и датчика положения. При этом дополнительно введен компенсатор, в который поступают преобразованные сигналы с преобразователя, при этом компенсатор включает в себя тактовый генератор, счетчик, два квадратурных счетчика, шесть блоков захвата, блок сдвига фазы и арифметический блок. Технический результат – повышение точности БИНС на основе лазерных гироскопов. 2 н.п. ф-лы, 5 ил.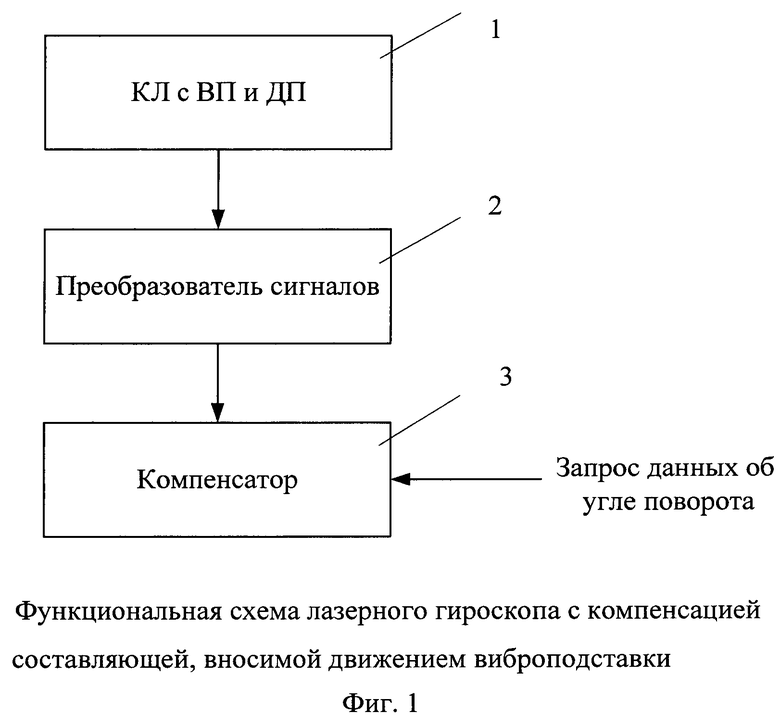
1. Способ компенсации движения виброподставки лазерного гироскопа, состоящий в том, что выходные сигналы кольцевого лазера и датчика положения поступают на преобразователь, в котором сигналы преобразуют в цифровой вид, отличающийся тем, что преобразованные сигналы с преобразователя поступают в компенсатор, в котором в моменты получения информации об угловом положении лазерного гироскопа осуществляют вычет составляющей, вносимой движением виброподставки, из абсолютного углового положения кольцевого лазера, относительно опорных точек, определяемых датчиком положения, в положениях, при которых составляющая, вносимая виброподставкой, отсутствует, с учетом задержки сигнала датчика положения от движения кольцевого лазера, при этом используют закономерности колебаний кольцевого лазера и параметров лазерного гироскопа: периода и амплитуды колебаний кольцевого лазера, времени запаздывания движения датчика положения от движения кольцевого лазера, времени между нулевым положением датчика положения, соответствующим смене знака амплитуды с отрицательного на положительное, и требуемым моментом получения информации об угловом положении лазерного гироскопа.
2. Лазерный гироскоп, содержащий кольцевой лазер с виброподставкой, датчиком положения, преобразователем, на который поступают выходные сигналы от кольцевого лазера и датчика положения, отличающийся тем, что дополнительно введен компенсатор, в который поступают преобразованные сигналы с преобразователя, при этом компенсатор включает в себя тактовый генератор, счетчик, два квадратурных счетчика, шесть блоков захвата, блок сдвига фазы и арифметический блок, причем тактовый генератор своим выходом соединен с входом счетчика, выход которого соединен с входами первого и второго блоков захвата, выходы которых соединены с входами арифметического блока, первый выход арифметического блока соединен с вторым входом блока сдвига фазы, выход которого соединен со вторым входом третьего блока захвата, на входы первого и второго квадратурных счетчиков поступают преобразованные сигналы, причем выход первого квадратурного счетчика соединен с входами третьего, четвертого и пятого блоков захвата, а выходы этих блоков захвата соединены с входами арифметического блока, на вход второго блока захвата и первый вход блока сдвига фазы и на второй вход четвертого блока захвата поступает сигнал с датчика положения, а на вход арифметического блока и вход первого блока захвата и на второй вход пятого блока захвата поступает запрос данных об угле поворота, выход второго квадратурного счетчика соединен с входом шестого блока захвата, выход которого соединен с соответствующим входом арифметического блока, на второй вход шестого блока захвата и на соответствующий вход арифметического блока поступает сигнал с датчика положения, а второй выход арифметического блока является выходом компенсатора.
| ЛАЗЕРНЫЙ ГИРОСКОП С КОМПЕНСАЦИЕЙ СОСТАВЛЯЮЩЕЙ, ВНОСИМОЙ ВИБРОПОДСТАВКОЙ | 2015 |
|
RU2613043C1 |
| СПОСОБ ОЦЕНКИ ПОГРЕШНОСТЕЙ ТРЕХОСНОГО ГИРОСКОПА | 2015 |
|
RU2619443C2 |
| Устройство для обучения перкуссии | 1984 |
|
SU1205172A1 |
| Способ измерения угловой скорости лазерного гироскопа со знакопеременной частотной подставкой | 2017 |
|
RU2651612C1 |

