Данное изобретение относится к трехосным гироскопам средней и повышенной точности, а конкретно к способу оценки их систематических погрешностей.
Для оценки качества трехосного гироскопа необходимо проводить оценку погрешностей по трем измерительным осям. Оценки систематических погрешностей используют для калибровки гироскопа с целью повышения его точностных характеристик.
Определение систематических дрейфов основано на измерении проекций угловой скорости вращения Земли на оси чувствительности гироскопа, ориентация которых определяется их конструктивным расположением и азимутальным расположением базы трехосного лазерного гироскопа в инерциальном пространстве.
Важными факторами (ограничениями) при оценке систематических погрешностей являются временные затраты, трудоемкость испытаний, а также использование дополнительного оборудования (стенды, специализированные кронштейны и т.д.) и необходимость выставки базы в известное азимутальное положение, либо его измерение. Кроме того необходимо корректно отделить систематическую составляющую ошибки выходной характеристики от других ошибок, например от ошибок, вызванных коническими колебаниями в осях механической виброподставки (ВП).
Известен способ [1, 2] оценки систематических погрешностей, заключающийся в том, что проводят поочередную выставку каждой оси чувствительности в вертикальное положение и проводят измерения в каждом положении в течение некоторого времени, оценивают систематическую составляющую измеренной угловой скорости по каждой оси по среднему значению измерений за вычетом вертикальной составляющей угловой скорости вращения Земли на данной широте места.
Недостатками данного способа являются необходимость использования специализированного кронштейна для выставки каждой оси чувствительности в вертикальное положение, а также большие временные затраты, необходимые для определения систематических погрешностей по каждой из трех осей чувствительности в отдельности, и высокая трудоемкость, обусловленная повторными операциями закрепления трехосного гироскопа на специализированном кронштейне.
Известен способ [2, 3] оценки систематических погрешностей трехосного гироскопа, заключающийся в том, что последовательно измеряют проекции угловой скорости вращения Земли в двух различных азимутальных положениях на поворотном столе, затем решают систему уравнений с нелинейными ограничениями, при этом поворот совершают вокруг оси, несовпадающей ни с одной из осей чувствительности трехосного гироскопа.
Недостатком данного способа является необходимость использования высокоточного поворотного стенда (требование по точности позиционирования менее 30'').
Наиболее близким к заявленному является способ [4] оценки систематических погрешностей трехосного гироскопа, заключающийся в определении разности между средними значениями систематической составляющей измеренной угловой скорости и проекциями вертикальной составляющей угловой скорости вращения Земли в нескольких азимутальных положениях относительно вертикальной оси базы трехосного гироскопа.
Недостатком данного и всех способов, рассмотренных выше, является то, что при расчете систематических ошибок измерительных каналов трехосного лазерного гироскопа не происходит отделение систематических ошибок от ошибок, вызванных коническими движениями в осях ВП.
Задачей, на решение которой направлено изобретение, является оценка систематических погрешностей трехосного лазерного гироскопа в нескольких азимутальных положениях (полученных поворотом с точностью 1° и хуже), с учетом ошибки вызванной коническими движениями вибрационной подставки.
Технический результат заключается в повышении достоверности оценки систематических погрешностей трехосного гироскопа, и как следствие в повышении точностных характеристик датчика с одновременным уменьшением трудоемкости процесса измерений.
Технический результат достигается за счет того, что в способе оценки систематических дрейфов трехосного лазерного гироскопа, заключающемся в определении разности между средним значением систематической составляющей измеренной угловой скорости и проекцией вертикальной составляющей угловой скорости вращения Земли, выполняют высокочастотные измерения в нескольких азимутальных положениях относительно вертикальной оси базы трехосного лазерного гироскопа, перевод в нормальную земную систему координат с помощью матрицы ориентации, компенсацию составляющей, обусловленной коническими движениями в осях виброподставки трехосного лазерного гироскопа с помощью алгоритма ориентации, цифровую фильтрацию углов ориентации, их обратный перевод из нормальной земной системы координат в измерительные оси трехосного лазерного гироскопа и переход от углов ориентации к измерениям температурного коэффициента линейного расширения (ТКЛР) (с помощью обратных кинематических соотношений); цифровую обработку измерений осуществляют путем построения аппроксимирующих функций, коэффициенты которых содержат информацию о характере изменения проекций угловой скорости вращения Земли; обработки коэффициентов аппроксимации, содержащих информацию о систематических дрейфах гироскопа.
К существенным отличиям заявляемого изобретения относятся необходимость высокочастотного съема и обработки информации с частотой, на порядок превышающей собственную частоту ВП трехосного гироскопа, применение алгоритма ориентации, для расчета углов Эйлера, цифровой фильтрации углов Эйлера и использования обратных кинематических соотношений для получения приращений измеренных углов с целью исключения из оценки систематического дрейфа ошибки, обусловленной коническими движениями в осях ВП.
Данный способ реализуют следующим образом.
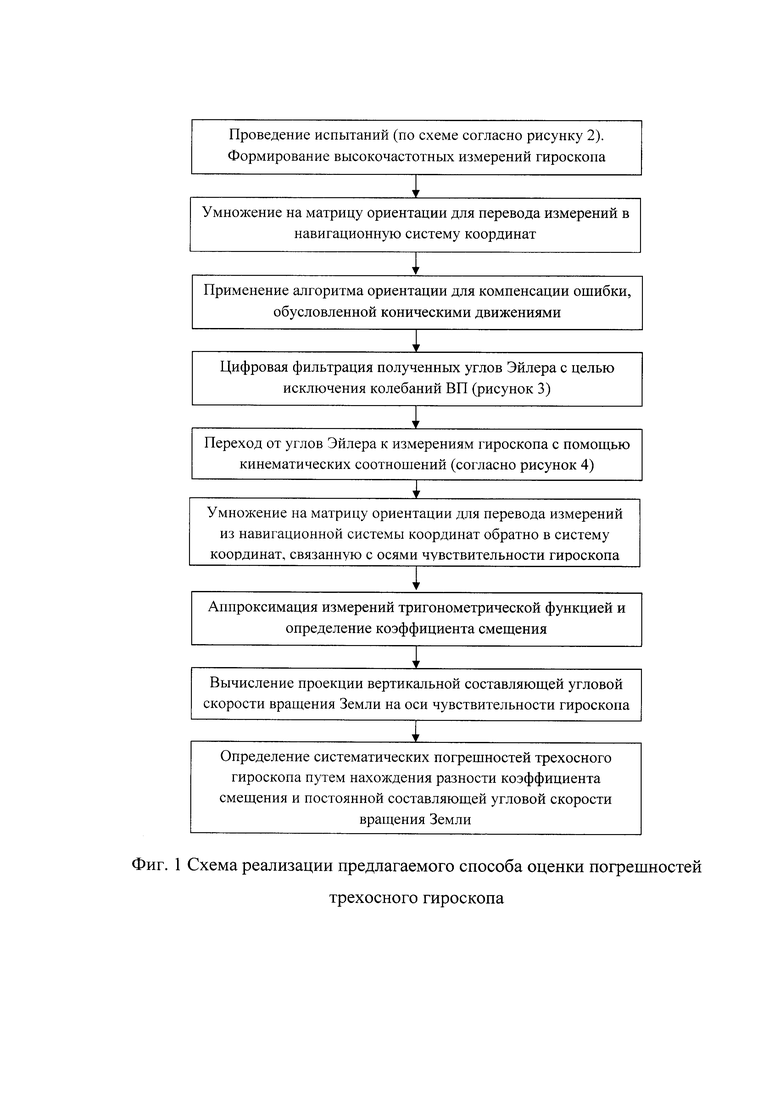
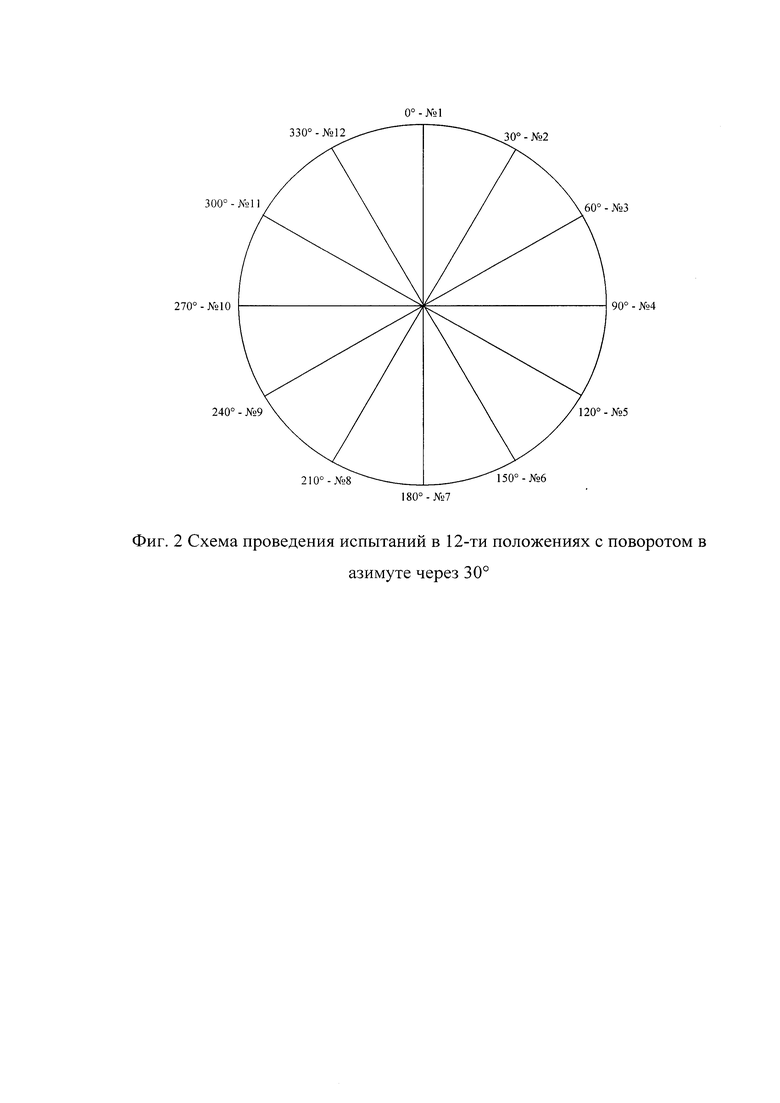
На рисунке 1 представлена схема реализации данного способа, согласно которой проводят высокочастотные измерения выходных сигналов гироскопа в нескольких азимутальных положениях (например, в 12-х положениях с поворотом в азимуте через 30° (рисунок 2)). При проведении испытаний начальный азимут может быть произвольным (требования к выставке азимута не предъявляются).
Полученные измерения из системы координат, связанной с осями чувствительности трехосного лазерного гироскопа, переводятся в навигационную систему координат с помощью умножения на соответствующую матрицу ориентации М, которая определяется исходя из расположения осей чувствительности гироскопа относительно основания установки. Например, если оси чувствительности образуют с плоскостью основания угол 35°15'92'', то матрица перехода будет равна:
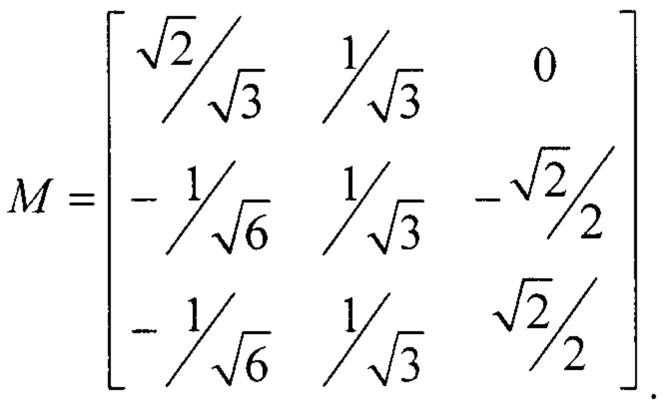
Далее измерения подаются на алгоритм ориентации (например, на двухшаговый алгоритм ориентации 2-го порядка), который компенсирует конические движения и постоянные ошибки, обусловленные этим движением, из показаний гироскопа.
Рассчитанные углы ориентации пропускают через цифровой фильтр для исключения (минимизации) гармонических колебаний виброподставки прибора. Применяемый цифровой полосовой фильтр (bandstop filter) получен объединением передаточных функций трех режекторных фильтров с частотами подавления равными:
1-й - частота ВП минус 10 Гц;
2-й - частота ВП;
3-й - частота ВП плюс 10 Гц.
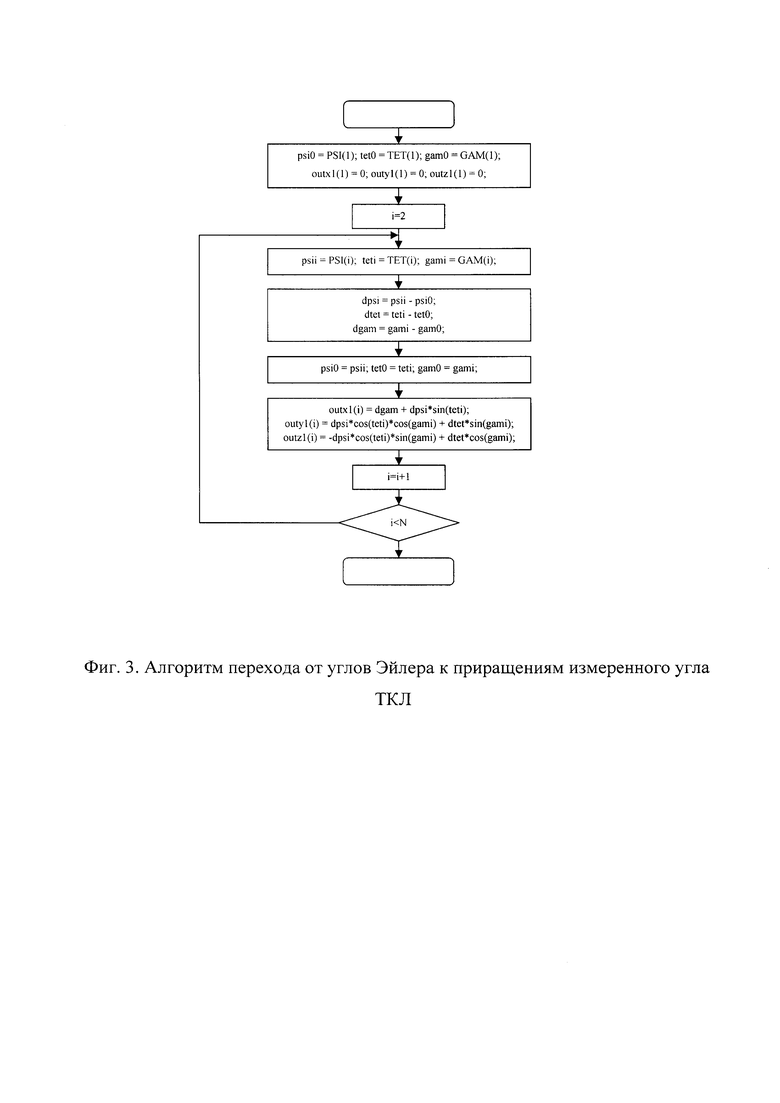
С помощью обратных кинематических соотношений из рассчитанных углов Эйлера получают приращения измеренного угла трехосного гироскопа (рисунок 3).
Далее с помощью умножения на матрицу ориентации MT измерения переводятся из навигационной системы координат обратно в систему координат, связанную с осями чувствительности трехосного лазерного гироскопа.
Затем повторно формируют массивы измерений, каждый из которых аппроксимируют тригонометрической функцией вида:
ωapr=C1⋅sin(C2+αr0)+C3,
где C1, C2, C3, α0 - параметры, определяемые по результатам аппроксимации - амплитуда, частота, смещение, начальная фаза соответственно.
Коэффициент С3 - коэффициент смещения - включает в себя систематическую погрешность гироскопа и постоянную составляющую, обусловленную вертикальной составляющей угловой скорости вращения Земли на данной широте места. Вычисляя проекцию вертикальной составляющей угловой скорости вращения Земли по известной формуле [5] (Ωy=ΩE⋅sin(B), где В - широта места, ΩE=15,04°/час - модуль угловой скорости вращения Земли) можно выделить систематические погрешности по каждому каналу трехосного гироскопа.
Проверка работоспособности предложенного способа оценки систематических погрешностей трехосного гироскопа была проведена на модельных данных и по результатам натурных испытаний трехосного лазерного гироскопа. Главное преимущество предлагаемого способа является то, что вначале проводится компенсация конических движений в осях ВП, приводящих к дополнительной ошибке в измерениях (результаты реальных включений прибора показывают, что ошибка от конических движений ВП в каждом канале достигает 1°/час и может меняться в зависимости от пространственного положения прибора). Исключение данной ошибки, позволит более качественно проводить оценку систематических дрейфов трехосного лазерного гироскопа с ВП.
Источники информации
1. Чувствительный элемент ЧЭ-03. Проверка. Техническая приемка. Инструкция. ИСМЯ.433741.029И1, п. 5.2.4.1
2. Суханов С.В., Гурлов Д.В. Алгоритмы оценки погрешностей трехосного лазерного гироскопа // Тезисы докладов XX научно-технической конференции молодых ученых и специалистов. Королев, 2014. С. 218-220.
3. Федоров А.Е., Рекунов Д.А., Переляев С.Е., Челноков Ю.Н. Калибровка блока инерциальных чувствительных элементов и моделирование автономного режима функционирования инерциальной системы на базе монолитного трехкомпонентного лазерного гироскопа // Новости навигации, 2010, №3. С. 20-25.
4. Гурлов Д.В., Суханов С.В. Способ оценки погрешностей трехосного гироскопа: пат.№2619443 РФ / 10.05.2017 Бюл. №13.
5. Матвеев В.В., Распопов В.Я. Основы построения бесплатформенных инерциальных навигационных систем // СПб.: ГНЦ РФ ОАО "Концерн "ЦНИИ Электроприбор", 2009. - 280 с. ISBN 978-5-900180-73-3. С. 119.
Изобретение относится к трехосным гироскопам средней и повышенной точности, а именно к способу оценки их систематических погрешностей. Способ оценки систематических дрейфов трехосного лазерного гироскопа (ТЛГ) с механической виброподставкой (ВП) дополнительно содержит этапы, на которых оценка систематических дрейфов ТЛГ проводится после компенсации ошибок, обусловленных коническими движениями в осях ВП. Технический результат заключается в повышении достоверности оценки систематических погрешностей трехосного гироскопа, и как следствие в повышении точностных характеристик датчика с одновременным уменьшением трудоемкости процесса измерений. 3 ил.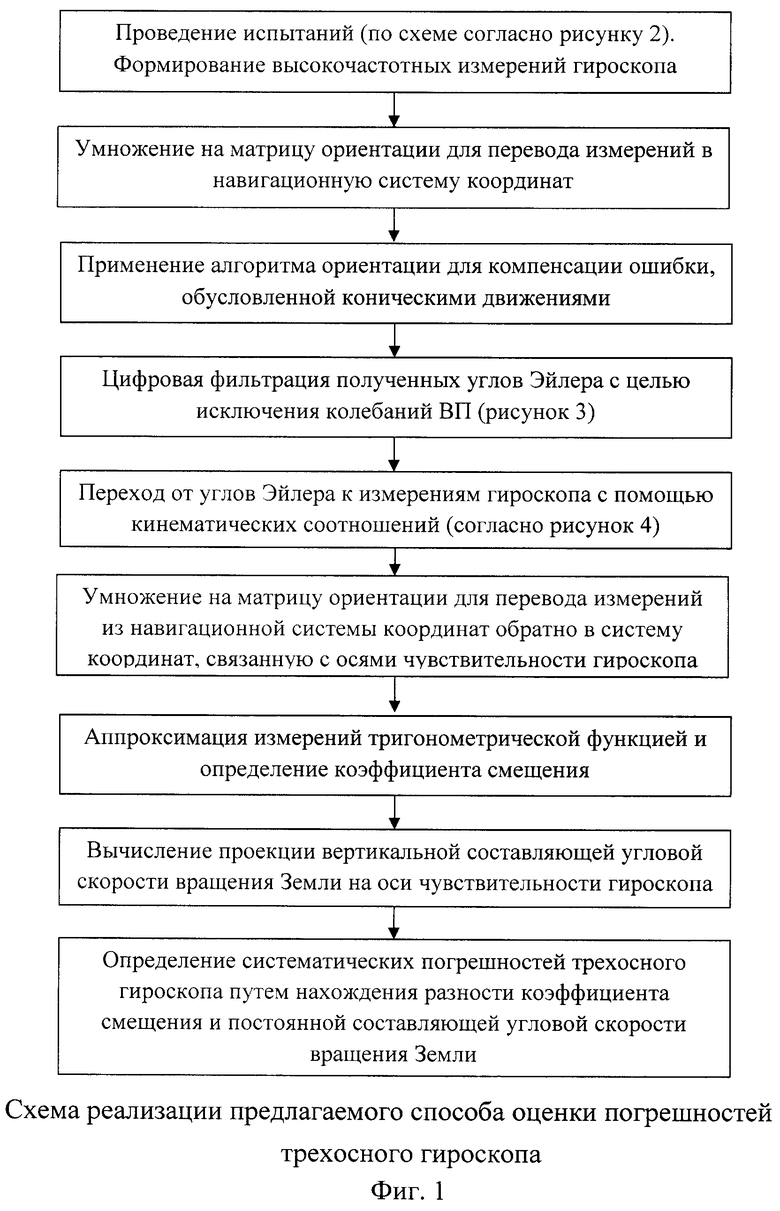
Способ оценки систематических дрейфов трехосного лазерного гироскопа (ТЛГ) с механической виброподставкой (ВП), заключающийся в проведении высокочастотных измерений выходных сигналов ТЛГ с частотой, на порядок превышающей собственную частоту ВП гироскопа, в нескольких азимутальных положениях и цифровой обработке полученных измерений с применением алгоритмов ориентации на основе расчета углов Эйлера для исключения из выходных измерений ТКЛР погрешностей, вызванных коническими движениями ВП, алгоритмов фильтрации для исключения колебаний ВП и обратных кинематических отношений для получения приращений измеренных углов, отличающийся тем, что оценка систематических дрейфов ТЛГ проводится после компенсации ошибок, обусловленных коническими движениями в осях ВП.
| СПОСОБ ОЦЕНКИ ПОГРЕШНОСТЕЙ ТРЕХОСНОГО ГИРОСКОПА | 2015 |
|
RU2619443C2 |
| Способ измерения дрейфа гироинерциальных систем | 1991 |
|
SU1838761A3 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА | 2014 |
|
RU2560742C1 |
| CN 106643802 A, 10.05.2017. | |||

