Изобретение относится к области измерительной техники, в частности, гироскопического приборостроения и предназначено для настройки датчиков угловых скоростей лазерного.
Функционально датчик угловых скоростей лазерный (ДУС-Л) состоит из двух узлов - чувствительного элемента и блока электронного.
Основой чувствительного элемента является кольцевой оптический квантовый генератор (кольцевой лазер), в котором создаются и поддерживаются автоколебания электромагнитной волны в оптическом диапазоне частот. Резонатор кольцевого лазера заполняется гелий-неоновой смесью, генерирующей лазерное излучение на длине волны 0,6328 мкм.
Принцип работы ДУС-Л основан на вихревом оптическом эффекте Саньяка, заключающемся в том, что во вращающейся системе координат время прохождения электромагнитной волны (светового луча) по замкнутому контуру отличается от времени ее прохождения по такому же контуру в покоящейся системе координат. Причем при вращении контура вокруг оси, нормальной к плоскости контура, разность фаз лучей пропорциональна угловой скорости вращения контура.
Блок электронный обеспечивает работу чувствительного элемента в заданных режимах и содержит следующие функциональные узлы.
Узел формирования информационных сигналов - предназначен для генерации импульсов, количество которых (при определенном пересчете квадратурными счетчиками) пропорционально приращению угла чувствительного элемента. Узел поджига и стабилизации токов накачки - предназначен для создания газового разряда в резонаторе кольцевого лазера и формирования токов накачки, обеспечивающих параметры лазерного излучения. Узел регулировки длины периметра резонатора кольцевого лазера - предназначен для обеспечения оптической длины периметра резонатора, кратной целому числу длин волн лазерного излучения. Тем самым обеспечивается работа чувствительного элемента на максимуме мощности лазерного излучения и минимизация погрешностей ДУС-Л. Регулирование длины оптического периметра производится посредством пьезокорректоров, установленных на зеркала резонатора кольцевого лазера. Узел вибрационной подставки - предназначен для задания и поддержания такого режима знакопеременных угловых колебаний, который обеспечивает выполнение измерений во всем рабочем диапазоне угловых скоростей, включая зону «захвата» (диапазон малых угловых скоростей). Возбуждение знакопеременных угловых колебаний осуществляется с помощью виброподвеса - электромеханического устройства (из состава чувствительного элемента) с пьезоэлектрическим приводом. Датчик углового положения (из состава виброподвеса) фиксирует момент перехода виброподвеса через положение равновесия, и его сигнал используется для обработки информации.
Блок электронный обычно разрабатывается на базе мощного быстродействующего микропроцессорного устройства с периферийными устройствами, обеспечивающими заданные уровни сигналов управления чувствительным элементом. Для работы системы, в целом, создается функциональное программное обеспечение, загружаемое в микропроцессор и управляющее работой ДУС-Л.
Настройка ДУС-Л является достаточно сложной технической задачей, поскольку с помощью программных средств микропроцессора необходимо реализовать одновременную работу нескольких функциональных узлов блока электронного таким образом, чтобы обеспечить наилучшие точностные характеристики чувствительного элемента и, соответственно, ДУС-Л.
Известно устройство для настройки электронной аппаратуры кольцевого лазера (Шолохова А.Л. Исследование конструктивно-технологических параметров автоматической системы регулирования периметра лазерного гироскопа с целью повышения его точности / Диссертация на соискание ученой степени кандидата технических наук, МАТИ, Москва, 2003),основанное на моделировании с использованием стандартных пакетов прикладных программ (SPACE-2, SPLICE и др.) и содержащее блоки датчика угловых скоростей (оптический генератор, измеритель мощности лазера, систему регулировки периметра резонатора и др.) и обеспечивает программный расчет параметров модели и их анализ для обеспечения оптимизации принципиальной схемы электронной аппаратуры кольцевого лазера.
Недостатком данного устройства является сложность математического моделирования больших принципиальных схем управления кольцевым лазером, что приводит к появлению неточностей в математическом моделировании его работы и, соответственно, увеличению погрешностей.
Известно устройство для настройки лазерного гироскопа (ДУС-Л) (лазерного датчика угловых скоростей) (Суханов С.В. Методы и алгоритмы повышения точностных характеристик лазерного гироскопа. Диссертация на соискание ученой степени кандидата технических наук, НГТУ, Н. Новгород, 2009), содержащее систему стабилизации токов разряда, систему вибрационной частотной подставки, систему регулировки периметра и систему обработки информации. Управление этими системами осуществляется микроконтроллером 87С196КС (серии MCS-196). Настройка ДУС-Л заключается в отладке программного обеспечения электронного блока для конкретного чувствительного элемента.
Недостатками данного устройства является следующее. Чувствительный элемент ДУС-Л представляет собой сложное и дорогостоящее устройство. Его оптический резонатор герметичен и заполнен гелий-неоновой смесью, а электронные схемы устанавливаются в герметизированный корпус, внутренний объем которого заполняется осушенным азотом. При отладке блока электронного, в случае ошибки оператора, например, подачи на выводы чувствительного элемента сигналов повышенного уровня напряжения, могут выйти из строя электронные, электромеханические или оптические компоненты, находящиеся внутри герметичного объема или герметизированного корпуса. При локализации неисправности внутри корпуса чувствительного элемента, его необходимо разобрать и заменить неисправный узел, выполнив при этом ряд других технологических операций, а в случае неисправности внутри герметичного объема - изготавливать весь чувствительный элемент заново. В результате значительно увеличивается время и стоимость изготовления ДУС-Л. Также, для настройки ДУС-Л в известном устройстве используют только реальные сигналы конкретного чувствительного элемента, что не позволяет эффективно (в полной мере) отработать программное обеспечение электронного блока, и тем самым повысить, в целом, точностные характеристики ДУС-Л.
Техническая проблема заключается в создании устройства для настройки датчика угловых скоростей лазерного, значительно уменьшающего вероятность выхода из строя сложного и дорогостоящего прибора - чувствительного элемента, ремонт которого связан с большими технологическими трудностями и материальными затратами.
Техническим результатом, на достижение которого направлено заявляемое изобретение, является повышение надежности, снижение трудоемкости изготовления лазерного датчика угловых скоростей и, как следствие, уменьшения экономических затрат.
Данные технические результаты достигаются тем, что для настройки ДУС-Л вместо чувствительного элемента применяется устройство, имитирующее работу функционального элемента ДУС-Л и содержащее блок формирования информационных сигналов, первый и второй выходы которого являются первым и вторым выходами устройства для настройки ДУС-Л соответственно, систему поджига и накачки лазера, первый и второй входы и выход которой являются соответственно первым и вторым входами и третьим выходом устройства для настройки ДУС-Л, датчик углового положения, выход которого является четвертым выходом устройства для настройки ДУС-Л, систему регулировки длин периметров резонатора, вход и первый и второй выходы которой являются соответственно третьим входом и пятым и шестым выходами устройства для настройки ДУС-Л, вибрационную подставку, вход и выход которой являются соответственно четвертым входом и седьмым выходом устройства для настройки ДУС-Л, при этом блок формирования информационных сигналов содержит формирователь информационных сигналов, первый, второй и третий входы которого соединены соответственно с выходами формирователя сигнала общего запуска, генератора сигнала опорной частоты и генератора сигнала датчика углового положения, а четвертый и пятый входы соединены соответственно с входами схем формирования частоты сигнала вращения ДУС-Л по часовой и против часовой стрелок, входы которых соединены с выходом первой схемы программирования, шестой вход формирователя информационных сигналов соединен с выходом второй схемы программирования, а выходы являются первым и вторым выходами блока формирования информационных сигналов соответственно; система поджига и накачки лазера включает в себя последовательно соединенные блок резистивных делителей, аналого-цифровой преобразователь, управляющий микроконтроллер и последовательный приемо-передатчик, выход которого является выходом системы поджига и накачки лазера, второй вход управляющего микроконтроллера соединен с выходом схемы программирования, при этом входы блока резистивных делителей являются первым и вторым входами системы поджига и накачки лазера соответственно; датчик углового положения содержит последовательно соединенные генератор частоты и счетчик-делитель, выход которого является выходом датчика углового положения; система регулировки длины периметра резонатора содержит последовательно соединенные блок резистивных делителей пьезокорректоров, аналого-цифровой преобразователь и управляющий микроконтроллер, первый и второй выходы которого соединены соответственно с входами цифро-аналоговый преобразователя и последовательного приемо-передатчика, выходы которых являются соответственно первым и вторым выходами системы регулировки длины периметра резонатора, а вход блока резистивных делителей пьезокорректоров является входом системы регулировки длины периметра резонатора, второй вход управляющего микроконтроллера соединен с выходом схемы программирования; вибрационная подставка содержит последовательно соединенные блок резистивных делителей виброподставки, аналого-цифровой преобразователь, управляющий микроконтроллер, последовательный приемо-передатчик, выход которого является выходом вибрационной подставки, а второй вход управляющего микроконтроллера соединен с выходом схемы программирования, при этом вход блока резистивных делителей вибрационной подставки является входом вибрационной подставки.
Заявляемое устройство для настройки ДУС-Л имитирует и формирует сигналы, идентичные по своим параметрам реальным сигналам чувствительного элемента ДУС-Л. Для ДУС-Л блок электронный подключается к заявляемому устройству и производится отладка электронных функциональных узлов блока электронного, алгоритмов работы и его программного обеспечения. Таким образом, при устранении в процессе работы возможных неисправностей блока электронного уменьшается вероятность вывода из строя чувствительного элемента, за счет чего повышается надежность, сокращается время и себестоимость отладки ДУС-Л в целом.
ДУС-Л может иметь более чем одну ось чувствительности. Наиболее распространены трехосевые лазерные датчики угловых скоростей с тремя перпендикулярно расположенными кольцевыми лазерами, позволяющими измерять угловые скорости вращения лазерного датчика угловых скоростей в трех плоскостях. Системы управления и блоки электронные для трехосевых датчиков угловых скоростей лазерных практически совпадают с системами управления лазерного датчика угловых скоростей с одной осью чувствительности.
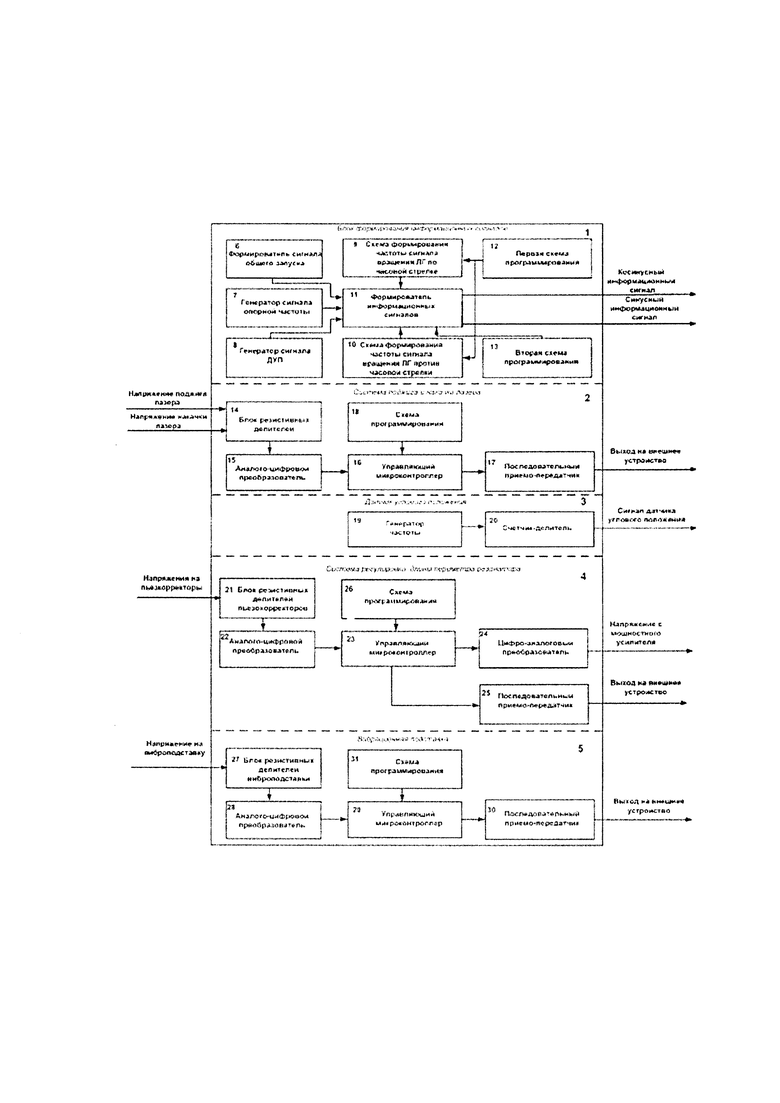
На фигуре приведена структурная схема устройства для настройки ДУС-Л (одноосного).
Устройство для настройки лазерного датчика угловых скоростей содержит блок 1 формирования информационных сигналов, первый и второй выходы которого являются первым и вторым выходами устройства для настройки ДУС-Л соответственно, систему 2 поджига и накачки лазера, первый и второй входы и выход которой являются соответственно первым и вторым входами и третьим выходом устройства для настройки ДУС-Л, датчик 3 углового положения, выход которого является четвертым выходом устройства для настройки ДУС-Л, систему 4 регулировки длины периметра резонатора, вход и первый и второй выходы которой являются соответственно третьим входом и пятым и шестым выходами устройства для настройки ДУС-Л, вибрационную подставку 5, вход и выход которой являются соответственно четвертым входом и седьмым выходом устройства для настройки ДУС-Л.
Блок 1 формирования информационных сигналов содержит формирователь 6 сигнала общего запуска, генератор 7 сигнала опорной частоты, генератор 8 сигнала датчика углового положения, схемы 9, 10 формирования частоты сигнала вращения датчика по часовой и против часовой стрелок, формирователь 11 информационных сигналов, первую 12 и вторую 13 схемы программирования. Первый, второй и третий входы формирователя 11 информационных сигналов соединены соответственно с выходами формирователя 6 сигнала общего запуска, генератора 7 сигнала опорной частоты и генератора 8 сигнала датчика углового положения, а четвертый и пятый входы соединены соответственно с входами схем формирования частоты сигнала вращения датчика по часовой 9 и против часовой 10 стрелки, входы которых соединены с выходом первой схемы 12 программирования. Шестой вход формирователя 11 информационных сигналов соединен с выходом второй схемы 13 программирования. Выходы (косинусный и синусный) формирователя 11 информационных сигналов являются первым и вторым выходами блока 1 формирования информационных сигналов соответственно. Формирователь 6 сигнала запускает работу всех систем имитатора и может быть реализован на цифровых логических элементах и кнопке. Генератор 7 сигнала формирует опорную частоту информационных импульсов и может быть выполнен на КМОП-микросхемах и кварцевом резонаторе. Генератор 8 сигнала датчика углового положения используется в квадратурных счетчиках для подсчета числа информационных импульсов и фиксации моментов времени перехода ВП через положение равновесия и смены фаз синусного и косинусного сигналов. Генератор 8 может быть выполнен в программируемой логической интегральной схеме (ПЛИС).
Формирователь информационных сигналов 11 может быть запрограммирован в ПЛИС. Он формирует два информационных сигнала (синусный и косинусный), сдвинутых по фазе друг относительно друга на 90 градусов. Данная схема дополнительно осуществляет смену следования фаз двух информационных сигналов по переднему фронту сигнала датчика углового положения. Для имитации поворота датчика по и против часовой стрелок используются внешние сигналы с микроконтроллера схемы формирования частот вращения 9, 10.
Схемы программирования 12, 13 могут быть разработаны на основе микросхем стандартных интерфейсов для микроконтроллеров и ПЛИС.
На основе структурной схемы фигуры 1 можно реализовать не только одноосный, но и двух или трехосный ДУС-Л. Это обеспечивается увеличением числа формирователей 11 информационных сигналов и схем формирования имитации сигналов вращения ДУС-Л 9 и 10 на нескольких микроконтроллерах.
Система 2 поджига и накачки лазера включает в себя последовательно соединенные блок 14 резистивных делителей, аналого-цифровой преобразователь (АЦП) 15, управляющий микроконтроллер 16 и последовательный приемо-передатчик 17. Выход последовательного приемо-передатчика 17 является выходом системы 2 поджига и накачки лазеров, второй вход управляющего микроконтроллера 16 соединен с выходом схемы 18 программирования. Входы блока 14 резистивных делителей резонаторов являются первым (напряжение поджига лазеров) и вторым (напряжение накачки лазеров) входами системы 2 поджига и накачки лазера соответственно. АЦП 15 и микроконтроллер 16 могут быть разработаны на базе стандартных аналоговых микросхем. Схема 18 программирования и последовательный приемо-передатчик 17 могут быть выполнены на основе микросхем стандартных интерфейсов.
Амплитуда импульсного напряжения поджига измеряется на блоке 14 резистивных делителей высоковольтным щупом и осциллографом.
Датчик 3 углового положения содержит последовательно соединенные генератор 19 частоты и счетчик-делитель 20, выход которого является выходом датчика 3 углового положения.
Генератор 19 может быть выполнен на КМОП-микросхемах и кварцевом резонаторе. Опорный сигнал поступает на счетчики-делители 20, запрограммированные в ПЛИС, с выхода которых генерируется сигнал датчика углового положения частотой несколько сотен герц, поступающий в формирователь 11 информационных сигналов для подсчета числа импульсов и вычисления приращения угла поворота чувствительного элемента.
Система 4 регулировки длины периметра резонатора содержит последовательно соединенные блок 21 резистивных делителей пьезокорректоров, аналого-цифровой преобразователь 22 и управляющий микроконтроллер 23. Первый и второй выходы управляющего микроконтроллера 23 соединены соответственно с входами цифро-аналоговый преобразователя 24 и последовательного приемо-передатчика 25, выходы которых являются соответственно первым (напряжение с мощностных усилителей) и вторым (на блок электронный) выходами системы 4 регулировки длин периметров резонаторов. Вход блока 21 резистивных делителей пьезокорректоров является входом системы 4 регулировки длин периметров резонаторов. Второй вход управляющего микроконтроллера 23 соединен с выходом схемы 26 программирования. АЦП 22 может быть выполнен на базе стандартных аналоговых микросхем.
Вибрационная подставка 5 содержит последовательно соединенные блок 27 резистивных делителей виброподставки, АЦП 28, управляющий микроконтроллер 29, последовательный приемо-передатчик 30. Выход последовательного приемо-передатчика 30 является выходом вибрационной подставки 5. Второй вход управляющего микроконтроллера 29 соединен с выходом схемы 31 программирования. Вход блока 27 резистивных делителей вибрационной подставки является входом вибрационной подставки 5.
Устройство для настройки датчика угловых скоростей лазерного работает следующим образом.
При включении питания (система 2 поджига и накачки лазеров) лазера напряжения накачки и поджига поступают на входы блока 14 резистивных делителей резонаторов и далее на АЦП 15. Цифровые значения двух токов накачки запоминаются в микроконтроллере 16 и затем через последовательный приемо-передатчик 17 по стандартному интерфейсу транслируются на внешнее устройство (персональный компьютер) для анализа. Если значения стабилизированных разрядных токов отвечают требованиям работоспособности системы накачки лазера, то разрешается работа ДУС-Л по измерению углов поворота.
В процессе настройки проверяется исправность устройства стабилизатора токов накачки, и измеряются амплитуды напряжений с импульсного преобразователя высоковольтного вторичного, входящих в состав блока электронного. Предварительная настройка высоковольтной системы 2 поджига и накачки лазера с помощью заявляемого устройства позволяет значительно уменьшить вероятность возможного высоковольтного пробоя и ремонта чувствительного, и тем самым, в итоге, снизить себестоимость изготовления ДУС-Л.
В системе 4 регулировки длины периметра резонатора напряжение с пьезокорректора поступает на вход блока 21 резистивного делителя пьезокорректоров и далее на АЦП 22. Цифровое значение напряжения пьезокорректора с выхода АЦП 22 запоминается в микроконтроллере 23 и передается через последовательный приемо-передатчик 25 на внешнее устройство. Пьезоэлемент, управляющий сдвигом зеркала резонатора, в допустимом диапазоне напряжений позволяет обеспечивать от трех до пяти максимумов мощности лазерного излучения. В микроконтроллере 23 программа управления его работой имитирует функцию изменения цифровых кодов пропорционально мощности лазера в зависимости от напряжения на пьезокорректоре, и также дополнительно имитирует смещение максимумов мощности лазерного излучения в зависимости от температуры резонатора во всем диапазоне регулировки напряжений на пьезокорректоре. После обработки цифрового кода напряжения на пьезокорректоре микроконтроллер 23 передает его значение в цифро-аналоговый преобразователь 24. С выхода цифро-аналогового преобразователя 24 напряжение, пропорциональное мощностному сигналу кольцевого лазера, поступает в блок электронный. Подпрограмма регулировки длин периметров резонаторов в микропроцессоре блока электронного анализирует значение имитируемой мощности лазерного излучения с заявляемого устройства и на следующем шаге регулировки изменяет напряжения на пьезокорректоре в сторону увеличения мощности кольцевого лазера. В результате производится автоматическое регулирование длины периметра резонатора, при котором лазерное излучение имеет максимально возможное значение. Так как в микроконтроллере 23 имитируется смещение максимумов мощности лазера при изменении температуры, то появляется возможность отработать режим, так называемого, «переброса» периметра, когда пик мощности лазерного излучения генерируется на границах диапазона регулировки напряжений на пьезокорректорах. В этом случае программа управления микропроцессора в блоке электронном скачкообразно изменяет напряжение на пьезокорректоре на константу переброса таким образом, чтобы напряжение на нем приблизилось к центру регулировки напряжений (нулю вольт). Тогда длина периметра резонатора скачкообразно изменится на 0,6328 мкм (длина волны лазерного излучения), и он начнет работать на другом максимуме мощности. В итоге, в процессе настройки системы 4 регулировки длины периметра резонатора заявляемое устройство дает возможность отработать электронные и программные средства блока электронного, при которых обеспечивается максимум лазерного излучения и, как следствие, лучшие точностные характеристики датчика.
В системе вибрационной подставки напряжение виброподставки поступает на вход блока 27 резистивного делителя виброподставки и далее на АЦП 28. Цифровое значения амплитуды напряжения на виброподставке запоминается в микроконтроллере 29, который предварительно программируется схемой 31, и затем через последовательный приемо-передатчик 30 по стандартному интерфейсу транслируется на внешнее устройство (для анализа). В процессе работы чувствительного элемента в программе управления микропроцессором блока электронного реализуются режимы ошумления и стабилизации амплитуды виброподставки, которые минимизируют ошибки измерения, обусловленные так называемой «зоной захвата». Анализ значений амплитуды вибрационной подставки (на внешнем устройстве) позволяет сделать выводы о корректности работы виброподставки 5 на длительном промежутке измерений, и обеспечить минимальную погрешность измерения угловой скорости.
Таким образом, на этапе настройки предварительная отработка алгоритмов программного обеспечения и электронных узлов блока электронного совместно с заявляемым устройством для настройки лазерного датчика угловых скоростей позволяют повысить точностные характеристики лазерного датчика угловых скоростей.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИАЛЬНОЕ ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО С ЦИФРОВЫМ СРЕДСТВОМ УПРАВЛЕНИЯ | 2019 |
|
RU2731656C1 |
| Система регулировки периметра зеемановского лазерного гироскопа | 2020 |
|
RU2724242C1 |
| Двухрежимный зеемановский лазерный гироскоп | 2020 |
|
RU2740167C1 |
| Система регулировки периметра зеемановского лазерного гироскопа | 2020 |
|
RU2736737C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2022 |
|
RU2796228C1 |
| Устройство регулировки периметра четырехчастотного зеемановского лазерного гироскопа | 2020 |
|
RU2744420C1 |
| Способ определения коэффициента чувствительности периметра резонатора зеемановского кольцевого лазера к воздействию линейных ускорений | 2020 |
|
RU2735490C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ДИНАМИЧЕСКИЙ ГИРОКОМПАС | 2020 |
|
RU2754964C1 |
| Способ компенсации движения виброподставки лазерного гироскопа и устройство для его реализации | 2020 |
|
RU2783617C1 |
| СИСТЕМА РЕГУЛИРОВКИ ПЕРИМЕТРА ЗЕЕМАНОВСКОГО ЛАЗЕРНОГО ГИРОСКОПА | 2015 |
|
RU2589756C1 |
Изобретение относится к области измерительной техники. Устройство для настройки лазерного датчика угловых скоростей, имитирующее работу чувствительного элемента лазерного датчика угловых скоростей, содержит блок формирования информационных сигналов, первый и второй выходы которого являются первым и вторым выходами устройства для настройки лазерного датчика угловых скоростей соответственно, систему поджига и накачки лазеров, первый и второй входы и выход которой являются соответственно первым и вторым входами и третьим выходом устройства для настройки лазерного датчика угловых скоростей, датчик углового положения, выход которого является четвертым выходом устройства для настройки лазерного датчика угловых скоростей, систему регулировки длин периметров резонаторов, вход и первый и второй выходы которой являются соответственно третьим входом и пятым и шестым выходами устройства для настройки лазерного датчика угловых скоростей, вибрационную подставку, вход и выход которой являются соответственно четвертым входом и седьмым выходом устройства для настройки лазерного датчика угловых скоростей. Технический результат – повышение надежности, снижение трудоемкости изготовления лазерного датчика угловых скоростей. 1 ил.
Устройство для настройки датчика угловых скоростей лазерного, имитирующее работу чувствительного элемента датчика угловых скоростей лазерного и содержащее блок формирования информационных сигналов, первый и второй выходы которого являются первым и вторым выходами устройства для настройки датчика угловых скоростей лазерного соответственно, систему поджига и накачки лазера, первый и второй входы и выход которой являются соответственно первым и вторым входами и третьим выходом устройства для настройки датчика угловых скоростей лазерного, датчик углового положения, выход которого является четвертым выходом устройства для настройки датчика угловых скоростей лазерного, систему регулировки длин периметров резонатора, вход и первый и второй выходы которой являются соответственно третьим входом и пятым и шестым выходами устройства для настройки датчика угловых скоростей лазерного, вибрационную подставку, вход и выход которой являются соответственно четвертым входом и седьмым выходом устройства для настройки датчика угловых скоростей лазерного, при этом блок формирования информационных сигналов содержит формирователь информационных сигналов, первый, второй и третий входы которого соединены соответственно с выходами формирователя сигнала общего запуска, генератора сигнала опорной частоты и генератора сигнала датчика углового положения, а четвертый и пятый входы соединены соответственно с входами схем формирования частоты сигнала вращения датчика угловых скоростей лазерного по часовой и против часовой стрелок, входы которых соединены с выходом первой схемы программирования, шестой вход формирователя информационных сигналов соединен с выходом второй схемы программирования, а выходы являются первым и вторым выходами блока формирования информационных сигналов соответственно; система поджига и накачки лазера включает в себя последовательно соединенные блок резистивных делителей, аналого-цифровой преобразователь, управляющий микроконтроллер и последовательный приемо-передатчик, выход которого является выходом системы поджига и накачки лазера, второй вход управляющего микроконтроллера соединен с выходом схемы программирования, при этом входы блока резистивных делителей являются первым и вторым входами системы поджига и накачки лазера соответственно; датчик углового положения содержит последовательно соединенные генератор частоты и счетчик-делитель, выход которого является выходом датчика углового положения; система регулировки длины периметра резонатора содержит последовательно соединенные блок резистивных делителей пьезокорректоров, аналого-цифровой преобразователь и управляющий микроконтроллер, первый и второй выходы которого соединены соответственно с входами цифро-аналоговый преобразователя и последовательного приемопередатчика, выходы которых являются соответственно первым и вторым выходами системы регулировки длины периметра резонатора, а вход блока резистивных делителей пьезокорректоров является входом системы регулировки длины периметра резонатора, второй вход управляющего микроконтроллера соединен с выходом схемы программирования; вибрационная подставка содержит последовательно соединенные блок резистивных делителей виброподставки, аналого-цифровой преобразователь, управляющий микроконтроллер, последовательный приемо-передатчик, выход которого является выходом вибрационной подставки, а второй вход управляющего микроконтроллера соединен с выходом схемы программирования, при этом вход блока резистивных делителей вибрационной подставки является входом вибрационной подставки.
| RU 2075042 C1, 10.03.1997 | |||
| УНИВЕРСАЛЬНЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ПРЕЦИЗИОННЫХ ГИРОСКОПИЧЕСКИХ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2009 |
|
RU2403538C1 |
| УНИВЕРСАЛЬНЫЙ ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2012 |
|
RU2494345C1 |
| CN 206919902 U, 23.01.2018. | |||

