Изобретение относится к авиационной технике, в частности к легким самолетам, содержащим в качестве несущей поверхности парашют-крыло, и может быть использовано в качестве компактного, простого в управлении, летательного аппарата.
Как известно, планирующие парашютные крылья (парапланы) пользуются исключительной популярностью. Однако совершать самостоятельные полеты на них можно только со склонов гор. Дополнительное оснащение параплана силовой установкой исключает указанный недостаток и позволяет осуществлять взлет практически с любой площадки.
Известен сверхлегкий летательный аппарат с двигателем и воздушным винтом (Франция, заявка N 2655017, кл. 5 B 64 C 39/00), включающий жесткую раму, связанную подвесной системой с несущей поверхностью парашютного крыла. Однако данный летательный аппарат, являясь простейшим, обладает существенным недостатком: во время полета пилоту требуется постоянно парировать воздействие реакции крутящего момента воздушного винта. В противном случае последний, воздействуя посредством подвесной системы на несущую поверхность указанного парашютного крыла, вызывает наклон этой поверхности, приводящий соответственно к развороту всего летательного аппарата в зависимости от величины реакции крутящего момента воздушного винта, в результате чего усложняется управление полетом.
Известен также легкий самолет (ЕПВ (ЕР), заявка N 0278784, кл. B 64 C 31/02), имеющий парашют-крыло, которое поддерживает шасси. Движущую силу создает двигатель, приводящий один воздушный винт. Реакцию от момента кручения воздушного винта компенсируют путем постоянной регулировки относительно длин строп, поддерживающих шасси.
Указанный выше принцип компенсации момента кручения воздушного винта при его технической реализации обладает существенным недостатком: при автоматической компенсации требуется дополнительное устройство, обеспечивающее однозначное соотношение между относительной длиной строп, поддерживающих шасси, и моментом кручения воздушного винта. В противном случае требуется отвлечение внимания и действий пилота на регулировку длин строп при управлении тягой воздушного винта, что существенно усложняет технику пилотирования, например в тех случаях, когда возникает необходимость в частом и резком изменении высоты полета или при выполнении полетов в восходящих и нисходящих потоках с выдерживанием заданной высоты полета.
Как следует из вышеизложенного, исключение влияния момента кручения воздушного винта на управление полетом является актуальной задачей при создании летальных аппаратов, содержащих в качестве несущей поверхности парашютное крыло и силовую установку с одним воздушным винтом.
Наиболее близким по технической сущности к предлагаемому решению является летательный аппарат, называемый мотопарапланом (США, заявка N 487221, кл. B 64 C 31/02 (патент ЕПВ N 0130925 A1). По своему составу он аналогичен предыдущему легкому самолету. В авторской интерпретации даны решения указанной задачи для варианта мотопараплана, имеющего силовую установку с одним воздушным винтом, реакция крутящего момента которого компенсируется с помощью одного из двух предлагаемых устройств - это шарнирной (маятниковой) подвески силовой установки вместе с воздушным винтом к тележке (шасси), и устройства, обеспечивающего перемещение в поперечном направлении тележки (шасси) вместе с силовой установкой относительно точек крепления силовых строп парашютного крыла. Однако и в том и в другом случае происходит отклонение линии действия силы тяги относительно вертикальной оси летательного аппарата, что приводит к возникновению нескомпенсированного разворачивающего момента и соответственно к развороту мотопараплана.
В силу сказанного, предложенные в данном случае варианты компенсации реакции момента кручения воздушного винта при их технической реализации обладают недостатками, аналогичными предыдущему решению: при автоматической компенсации требуется дополнительное устройство, обеспечивающее однозначное соответствие между положением центра тяжести мотопараплана и моментом кручения воздушного винта, в противном случае требуется отвлечение внимания и действий пилота на регулировку положения центра тяжести мотопараплана при управлении тягой воздушного винта (возникающий при этом нескомпенсированный разворачивающий момент является дополнительной помехой), что существенно усложняет технику пилотирования.
Отмеченные выше недостатки является следствием неэффективности предлагаемых решений по пути компенсации отрицательного влияния реакции крутящего момента воздушного винта на характеристики управляемости летательных аппаратов, использующих парашютные крылья в качестве несущих поверхностей.
Техническим результатом данного изобретения является летательный аппарат с высокими летно-техническими характеристиками и эксплуатационной технологичностью, благодаря исключению воздействия реакции крутящего момента воздушного винта на парашют-крыло (парашютное крыло).
Указанный технический результат достигается тем, что известный легкий самолет содержит парашют-крыло, шасси с силовой установкой, имеющей воздушный винт, снабжен подвесной системой в виде шарнирного механизма с ограниченной подвижностью, одно звено которого представляет собой двуплечий рычаг, к концам которого крепятся стропы парашюта-крыла, а другое звено образует шасси с силовой установкой и воздушным винтом.
На фиг. 1 изображен легкий самолет; на фиг. 2 - пример конструкции подвесной системы; на фиг. 3, 4, 5 - схемы, поясняющие работу подвесной системы; на фиг. 6 - пример конструкции упоров фиксации подвесной системы.
Действие подвесной системы основано на известных свойствах передачи крутящего момента цилиндрических шарниров в кинематических парах и выполненных на их основе карданных соединений.
Легкий самолет (фиг. 1) включает в себя: парашют-крыло 1; подвесную систему 2; подвешенную часть самолета, состоящую из шасси 3 и силовой установки 4 с воздушным винтом.
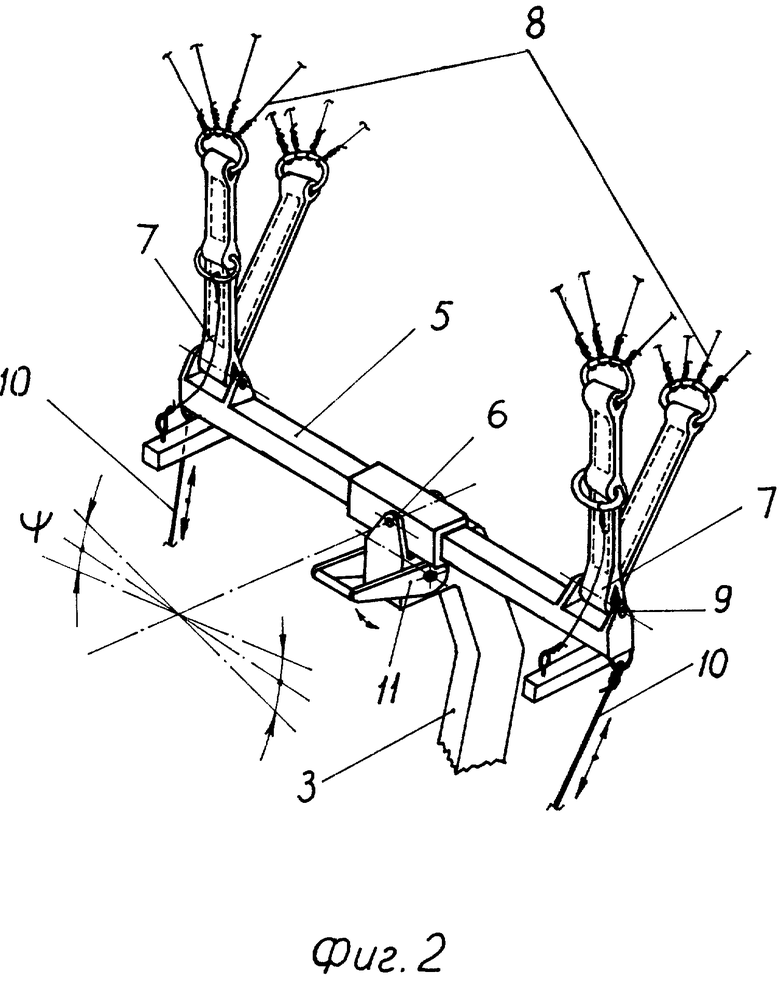
Подвесная система (фиг. 2) включает в себя: двуплечий рычаг 5, обладающий ограниченной подвижностью вокруг продольной оси 6 на величину угла ψ , которая обеспечивается конструктивно, в данном случае зазором между нижней поверхностью рычага 5 и шасси 3; узлы крепления 7 строп парашюта-крыла 1, обладающие подвижностью вокруг поперечной оси 9.
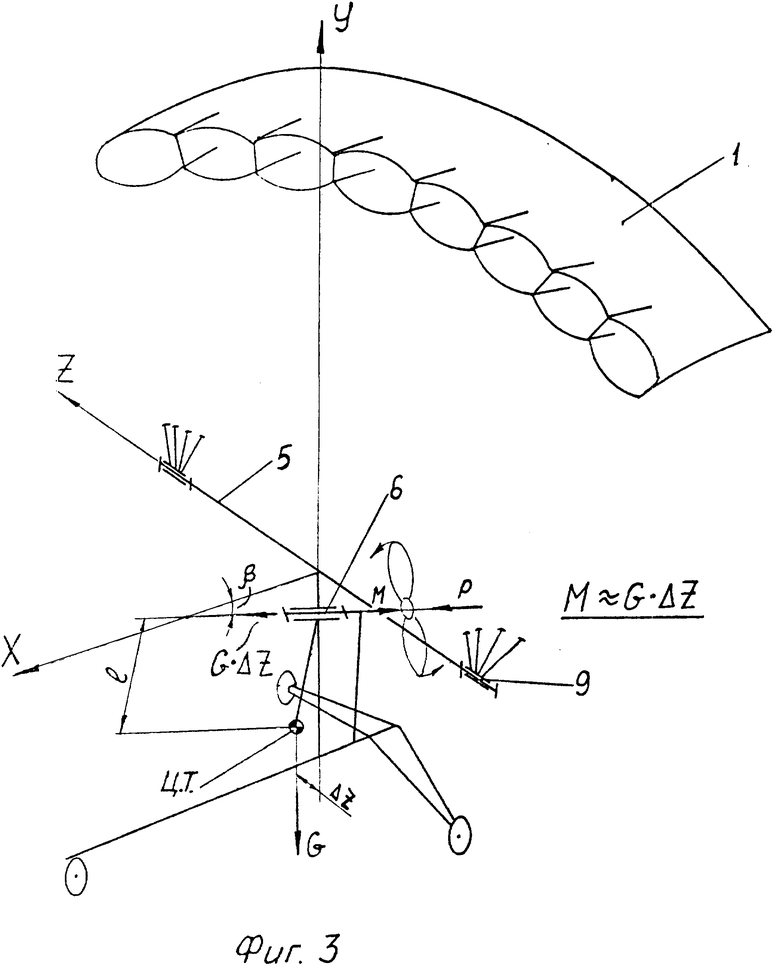
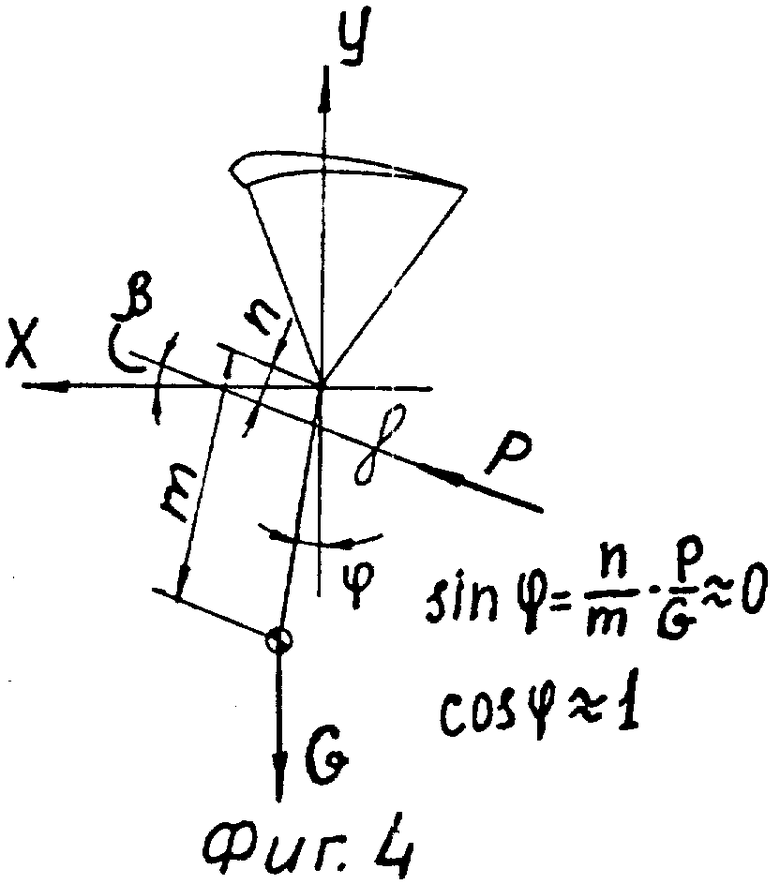
При движении самолета парашют-крыло 1 создает подъемную силу, которая посредством подвесной системы 2 осуществляет подъем и поддержку в полете подвешенной части самолета, состоящей из шасси 3 и силовой установки 4 с воздушным винтом, создающим для полета (движения) силу тяги. Во время полета при работающей силовой установке 4 происходит отклонение подвешенной части самолета вокруг осей 6 и 9 относительно вертикальной оси Y под действием реакции крутящего момента M и силы P тяги воздушного винта фиг. 3, 4, 5.
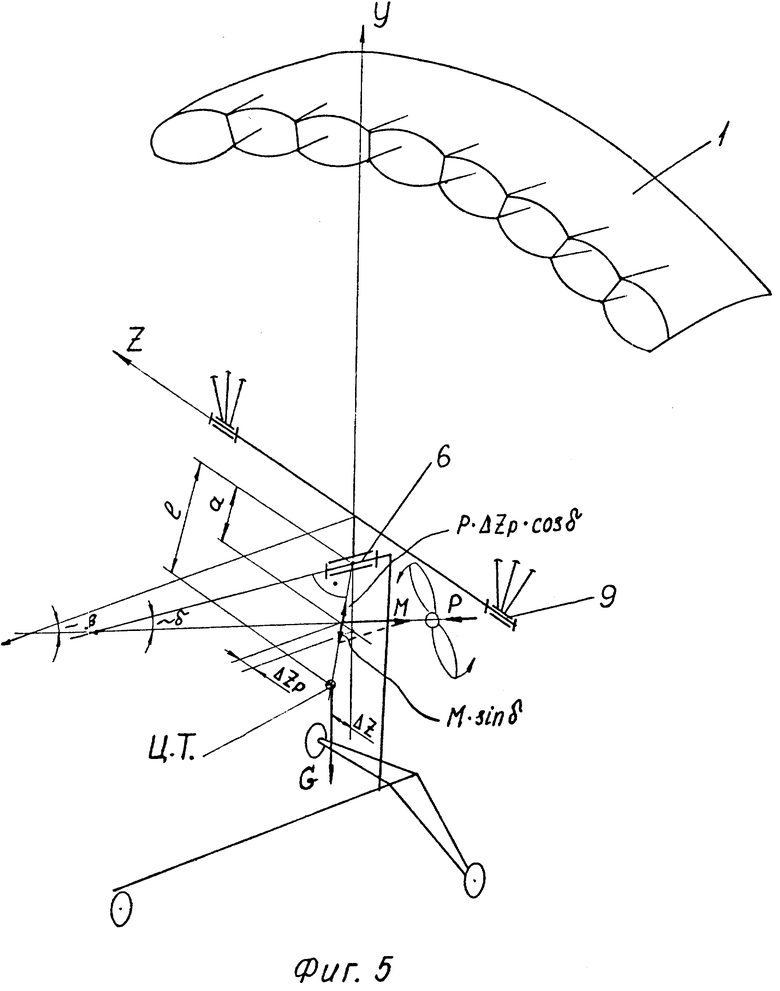
При этом, как видно из фиг. 3 и 5, величина отклонения ΔZ вокруг оси 6 зависит от расстояния l центра тяжести подвешенной части самолета до оси 6 и крутящего момента M реакции воздушного винта, а величина отклонения ϕ (фиг. 4) вокруг оси 9 - от соотношения расстояний центра тяжести подвешенной части самолета и линии действия силы тяги P до оси 9 и практически должна быть пренебрежимо малой.
Относительное положение линии действия силы тяги P и продольной оси 6 должно быть таким, чтобы они либо пересекались, либо совпадали.
При совпадении продольной оси 6 и линии действия силы тяги P (фиг. 3) последняя, при изменении величины силы тяги, соответственно и величины реакции крутящего момента воздушного винта, не создает разворачивающего момента, действующего на парашют-крыло, относительно вертикальной оси, т.к. всегда пересекает ее. Благодаря тому, что вектор реакции крутящего момента воздушного винта M параллелен продольной оси 6, то его передача на рычаг 5 и далее на парашют-крыло 1 исключается, и он полностью уравновешивается моментом силы тяжести G•ΔZ относительно продольной оси 6.
Таким образом, при совпадении линии действия силы тяги P воздушного винта с продольной осью 6 подвесной системы 2 парашют-крыло 1 свободно от влияния реакции крутящего момента M воздушного винта на характеристики управления самолетом.
Причем необходимо отметить, что данное решение позволяет выбрать угол наклона вектора тяги P (фиг. 3) воздушного винта в вертикальной плоскости исходя из условия обеспечения требуемых летно-технических характеристик: минимальной взлетной дистанции, минимальной потребной мощности для горизонтального полета и т.д.
Если линия действия силы тяги P и продольная ось 6 подвесной системы 2 пересекаются (фиг. 5), то угол пересечения δ (угол установки воздушного винта) между ними выбирается таким образом, чтобы суммарный момент относительно вертикальной оси, слагаемый из действия силы тяги и равный P•ΔZp, и реакции крутящего момента, равной M•sinδ , был минимальным, т.е. должно выполняться условие:
где
a - отрезок от оси кардана до линии действия силы тяги;
l - отрезок оси кардана до ц.т. подвешенной части самолета;
Pф - сила тяги воздушного винта, соответствующая определенному режиму полета (например горизонтальному полету);
G - сила тяжести подвешенной части самолета.
При этом, если текущее значение силы тяги равно Pф, то суммарный момент относительно вертикальной оси Y будет равен нулю, а при остальных значениях силы тяги от будет отличаться на величину ,
,
где
M - текущее значение реакции крутящего момента воздушного винта;
P - текущее значение тяги воздушного винта;
Pф - значение тяги воздушного винта, в соответствии с которым определен угол установки δ.
Из формулы видно, что величину ΔΜ можно уменьшить до любых приемлемых величин соотношением a/l, а следовательно, практически исключить воздействие реакции крутящего момента воздушного винта на характеристики управления самолетом.
Необходимо отметить, что в данном случае, как и в предыдущем, когда продольная ось подвесной системы и линия действия силы тяги совпадают, можно выбрать угол наклона вектора тяги воздушного винта в вертикальной плоскости, исходя из условия требуемых летно-технических характеристик: минимальной взлетной дистанции, минимальной потребной мощности для горизонтального полета и т.п. Возникающую при этом незначительную боковую силу (проекция силы тяги P на ось Z) компенсирует скольжение купола парашюта-крыла, тем самым сохраняя направление полета.
Важным техническим результатом применения данного изобретения является возможность управления полетом самолета с помощью изменения положения двуплечего рычага 5 в пределах угла наклона ψ (фиг. 2) посредством кинематической связи 10 с командными органами-рычагами ножного или ручного управления, установленными для этой цели на самолет. Наклон двуплечего рычага 5 влево или вправо соответственно вызывает крен парашюта-крыла 1 и разворот самолета в ту же строну.
Конструктивно проводка управления (кинематическая связь) может быть заимствована или выполнена аналогично проводке управления элеронами или рулем направления, применяемой на самолетах. Таким образом можно обеспечить не только управление курсом данного самолета в полете, но и, зафиксировав с помощью усилия рук или ног органы командного управления в одном положении, например в крайнем или нейтральном, исключив тем самым подвижность двуплечего рычага 5, улучшить устойчивость самолета на разбеге.
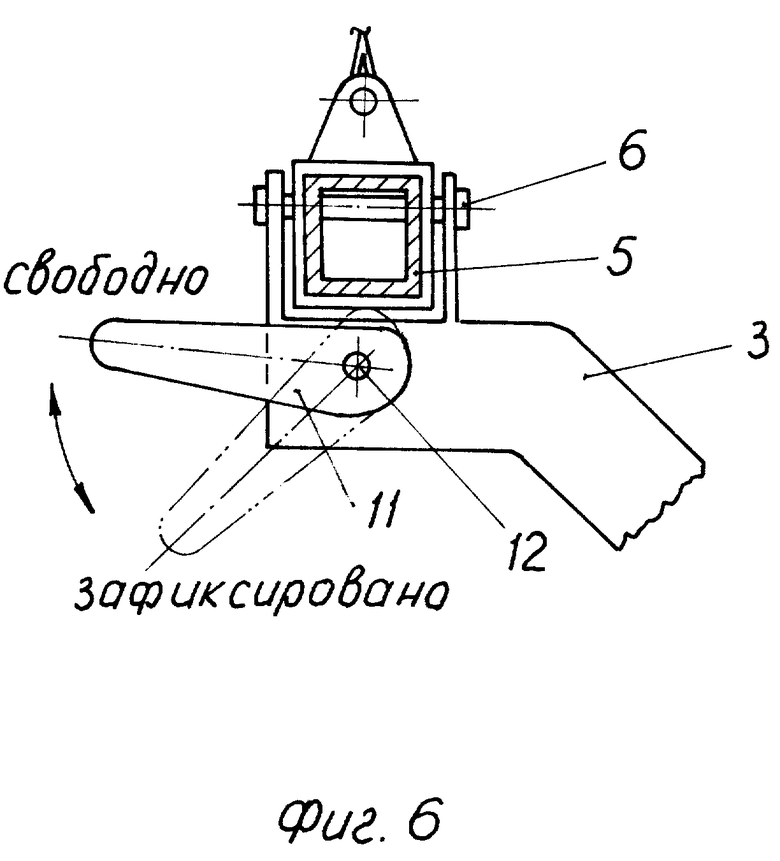
Фиксацию рычага с вышеуказанной целью можно осуществить и с помощью упора 11, изображенного в качестве примера на фиг. 6. Конструктивно он состоит из двух соединенных между собой пластин, сквозь которые проходит ось 12. Часть контура пластин относительно указанной оси выполнена по эксцентричной дуге.
В положении "зафиксировано" пластины упираются в нижнюю поверхность двуплечего рычага 5 (фиг. 2, 6) по обе стороны относительно оси 6. При этом, очевидно, рычаг 5 оказывается зафиксированным. Управление наклоном рычага 5 в этом случае исключается до момента взлета самолета. После взлета упор 11 переводится в положение "свободно", благодаря эксцентриситету, между пластинами упора 11 и рычагом 5 образуется зазор и рычаг 5 может свободно вращаться относительно оси 6 в пределах угла ψ .
| название | год | авторы | номер документа |
|---|---|---|---|
| ПАРАШЮТНАЯ СИСТЕМА | 1990 |
|
SU1762508A1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С МЯГКИМ КРЫЛОМ И ДВИЖИТЕЛЕМ (ВАРИАНТЫ) | 2019 |
|
RU2830446C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2020 |
|
RU2754278C1 |
| Способ парашютной посадки беспилотных самолетов и беспилотный самолет с системой парашютной посадки | 2023 |
|
RU2834660C1 |
| АВТОКОНВЕРТОПЛАН | 2017 |
|
RU2699593C2 |
| СПОСОБ ПАРАШЮТНОЙ ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА И ПАРАШЮТНАЯ СИСТЕМА ПОСАДКИ БЕСПИЛОТНОГО САМОЛЕТА | 2014 |
|
RU2592961C2 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С ПАРАШЮТНОЙ СИСТЕМОЙ ПОСАДКИ | 2010 |
|
RU2456211C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
| СКОРОСТНОЙ ТУРБОВЕНТИЛЯТОРНЫЙ ВИНТОКРЫЛ | 2016 |
|
RU2629475C1 |
| Парашютный спасательный комплекс для легкого многоцелевого самолёта | 2023 |
|
RU2819466C1 |
Изобретение относится к авиационной технике. Сущность: самолет содержит парашют-крыло 1, силовую установку, подвесную систему в виде шарнирного механизма с ограниченной подвижностью, одно из звеньев которого представляет собой двуплечий рычаг, к концам которого крепятся стропы парашюта-крыла 1, а другое звено образовано шасси с силовой установкой, имеющей воздушный винт. Звенья соединены друг с другом осью так, что исключается воздействие крутящего момента силовой установки на парашют-крыло 1, отрицательно влияющее на управление самолетом. Самолет оснащен рычагами ручного или ножного управления, связанными кинематически с двуплечим рычагом. Угол наклона вектора тяги воздушного винта можно согласовать с летно-техническими характеристиками минимальной потребной мощностью для горизонтального полета, минимальной взлетной дистанцией и т.д. 2 з.п. ф-лы, 6 ил.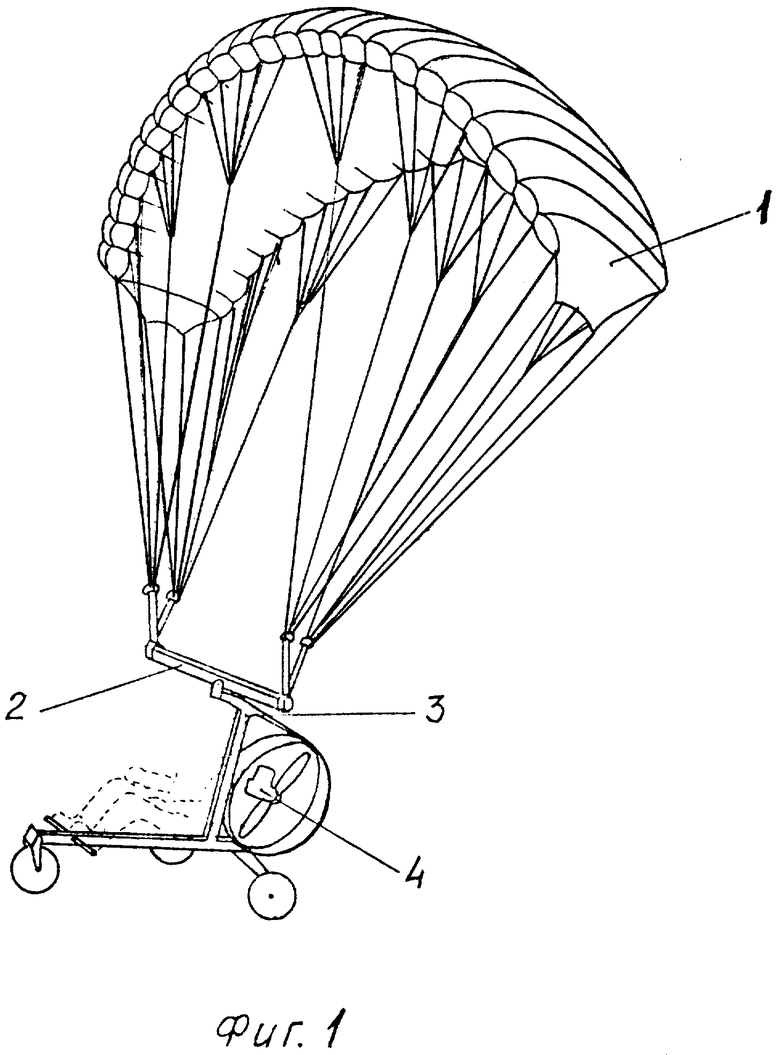
| EP, заявка, 030925, B 64 C 31/02 | |||
| FR, заявка, 2577514, B 64 C 19/00, 1986 . |
