Изобретение относится к авиационной технике, и может быть использовано в конструкциях парашютов, кайтов и летательных аппаратах (ЛА) с мягким крылом.
В техническом решении по изобретению, для удобства использования летательных аппаратов с мягким крылом, крыло в стартовое положение поднимается в воздух, натягивая стропы, вне зависимости от наличия набегающего внешнего воздушного потока (ветра).
Известен парашют - состоящий из купола, строп, вытяжного парашюта и подвесной системы, который раскрывается в рабочее положение с помощью набегающего потока воздуха при прыжке. Недостатком данного способа раскрытия парашюта - требуется давление воздуха для раскрытия купола создаваемое при свободном падении, что ограничивает высоту с которой используется парашют.(ru. Wikipedia. Orq Парашют Википедия. Аналог)
Известен надувной кайт-управляемый воздушный змей предназначенный для буксировки с помощью ветра, состоящий из мягкого крыла с наполненным воздухом каркасом, системой строп и ручек управления. Запуск надувного кайта происходит следующим образом: на земле расправляются стропы, надувается воздухом каркас, крыло расправляется и под действием ветра поднимается в воздух. Недостатком такого старта является наличие постоянно дующего ветра и не способность удерживаться в воздухе при отсутствии ветра.(ru. Wikipedia. Orq. Кайт-Википедия. Аналог)
Известно устройство для раскрытия купола парашюта, содержащее два баллона первый баллон, который при наполнении водородом или гелием выполнен с возможностью подъема и расправки купола парашюта, а второй баллон предназначенный для хранения водорода или гелия, устройство снабжено шлангом с запорным устройством для наполнения первого баллона из второго. В данном парашюте купол при заполнении первого баллона расправляется и поднимается в стартовую позицию. Недостатком данного способа является низкое аэродинамическое качество, взрывоопасность водорода и высокая стоимость гелия. (Патент РФ2285638 Аналог.)
Наиболее близким к заявленному изобретению относится мягкое газонаполненное крыло. Информация: «МЯГКОЕ ГАЗОНАПОЛНЯЕМОЕ КРЫЛО» Патент РФ2121943 Автор: Киселёв Валерий Семёнович. Крыло выполнено с полой газонепроницаемой оболочкой, разделенную на секции, снабженное герметичными отсеками для легкого газа, оснащенное системой строп и подвесок, содержит емкость со сжатым газом и гибкий газопровод соединяющий емкость со всеми герметичными отсеками. Подъем крыла в предстартовую позицию происходит при наполнении легким газом (водородом или гелием) герметичных отсеков крыла, что создает крылу подъемную Архимедову силу и расправляет крыло для старта. Основным недостатком данного способа подъема крыла является одноразовость заполнения герметичных отсеков крыла газом легче воздуха, при этом водород - взрывоопасен а гелий дорогой газ. Если использовать газ многократно то потребуются дополнительные перекачивающие насосы, что значительно усложняет конструкцию крыла и ограничивает функциональные возможности летательных аппаратов, конкретно -сборку и хранение крыла, например в малом объеме ранца или отсека летательного аппарата. Данное техническое решение, для рассматриваемого изобретения является прототипом.
Задача заявленного изобретения:
* Создание летательных аппаратов с мягким крылом, с функцией подъема крыла в стартовую позицию, без применения подъемной статической Архимедовой силы газа легче воздуха.
* Подъем мягкого крыла летательного аппарата в стартовое положение вне зависимости от наличия внешнего воздушного потока (ветра).
* Сбор и хранение мягкого крыла летательного аппарата в малом объеме, например ранца или отсека для хранения крыла в собранном виде.
* Применение мягкого крыла в линейке летательных аппаратов низкой стоимости при улучшенных функциональных свойствах.
Поставленная задача достигается тем, что мягкое крыло связанно стропами с системой подвеса закрепленным на перемещаемом объекте, например; ранце, корпусе летательного аппарата (фюзеляже), или корпусе транспортного средства. Для раскрытия мягкого крыла, крыло выполнено пневмокаркасным, причем каркас воздухонепроницаем и заполняется воздухом под давлением, обеспечивая мягкому крылу соответствующую форму и относительную жесткость. Воздух поступает в каркас через гибкий воздуховод связанный, в зависимости от требуемой экономической целесообразности или скорости наполнения каркаса воздухом, через редуктор с баллоном со сжатым воздухом или насосом прямого действия или компрессором с ресивером. Для сброса воздуха, при упаковке мягкого крыла, пневмокаркас снабжен сбросным клапаном. Для подъема в воздух мягкого крыла, в нем выполнено одно или несколько отверстий, в которых в кольцевой раме закреплены воздушные винтовые движители, содержащие электродвигатель с воздушным винтом на валу. Электродвигатели и электропривода, соединены электрическими кабелями, с источником питания, расположенным ниже системы подвеса строп. Воздушные винтовые движители создают при подъеме мягкого крыла, перпендикулярный к плоскости мягкого крыла, воздушный поток через отверстия. Мягкое крыло, имеющее форму и объем, созданный наполненным воздухом пневмокаркасом, поднимается в воздух воздушным потоком проходящих через отверстия в крыле. Мягкое крыло, поднятое в воздух воздушным потоком, созданным воздушными винтами, натягивает стропы, электрокабели, гибкий воздуховод и устанавливается в предстартовое положение. В конструкции следует учитывать фактор крутящего момента создаваемым воздушным винтом, то есть крутящиеся моменты должны быть взаимно компенсированы. Для снятия излишней нагрузки на мягком крыле от воздушных винтовых движителей, кольцевая рама движителей непосредственно соединена стропами с системой подвеса. При необходимости дополнительного маневрирования крылом в полете, что желательно например: в конструкции воздушных змеев и устройств на их основе, тяговых кайтов, парашютов в форме крыла и летательных аппаратов на их основе, двигатели, воздушных винтовых движителей, выполнены с регуляторами оборотов и поворотными, создающие воздушный поток регулируемой мощности различного направления. Для осуществления данной функции, в кольцевой раме воздушных винтовых движителей, установлены исполнительные механизмы с электроприводом, поворачивающие электродвигатели воздушных винтовых движителей плоскостью воздушных винтов от параллельного до перпендикулярного к плоскости мягкого крыла. В дополнении к данному механизму, установлены механизмы с электроприводом, поворачивающие кольцевую раму в плоскости мягкого крыла, что создает большие возможности для маневра. Механизм поворота электродвигателя воздушного винтового движителя, плоскостью воздушных винтов от параллельного до перпендикулярного к плоскости мягкого крыла, установлен на кольцевой раме закрепленной на пневмокаркасе мягкого крыла в отверстиях, посажен на двух осях вращения параллельных продольной оси крыла и снабжен электроприводом поворота электродвигателя, закрепленного на осях, воздушного винтового движителя. Механизм, поворачивающий кольцевую раму в плоскости мягкого крыла, снабжен электроприводом поворота кольцевой рамы в плоскости крыла, соответственно механизм поворота, установлен на кольцевой опоре, жестко закрепленной на пневмокаркасе в отверстии крыла. Маневрирования мягкого крыла в воздухе, регулируемыми по величине и направлению векторами тяги воздушных потоков, применим для летательных аппаратов использующих воздушные винтовые движители крыла и в качестве тяговых движителей при подъеме, зависании и горизонтальном полете. Стропы, электрические кабеля и гибкий воздуховод мягкого крыла, в зависимости от летательных аппаратов в котором они применены, собираются и распускаются обычным способом (парашют), или в более сложных летательных аппаратах с помощью электролебедок, причем индивидуальная электролебедка может быть установлена и на стропы управления мягкого крыла, например в буксировочных кайтах большой мощности. Управление оборотами и механизмами поворотов воздушных винтовых движителей - по электрическому кабелю или с пульта дистанционного управления. Запуск крыла в предстартовое положение производится следующим образом; крыло извлекается из ранца (отсека хранения), открывается клапан источника сжатого воздуха, по гибкому воздуховоду, воздух под давлением поступает в пневмокаркас мягкого крыла. Мягкое крыло принимает рабочую форму, под действием давления воздуха в пневмокаркасе. Включаются винтовые воздушные движители. При включении, движители создают воздушный поток через отверстия в крыле перпендикулярно к земле и поднимают крыло в воздух натягивая стропы. Мягкое крыло занимает стартовое положение и в зависимости от варианта летательного аппарата, для которого предназначено крыло, производятся дальнейшие действия с мягким крылом и объектом соединенным с крылом стропами.
Варианты летательных аппаратов с мягким крылом по вышеизложенному описанию:
1. А) Летательный аппарат с мягким крылом и движителем - парашют для прыжков с высотных неподвижных объектов. Летательный аппарат содержит; встроенный в мягкое крыло (парашют), воздухонепроницаемый пневмокаркас со сбросным клапаном, источник сжатого воздуха, соединенный с пневмокаркасом гибким воздуховодом, систему строп соединенные с подвесной системой парашютиста и электрические кабеля соединяющие электрические воздушные винтовые движители с аккумулятором. В пневмокаркасном мягком крыле, в верхней части, выполнены одно или два отверстия, в которых установлены и закреплены на пневмокаркасе, один или два воздушных винтовых движителя. Воздушный винтовой движитель содержит электродвигатель с воздушными винтом на валу, направляющий воздушный поток перпендикулярно плоскости крыла - вниз. Мягкое крыло соединено стропами с подвесной системой парашютиста. Для снятия излишней нагрузки от воздушных винтовых движителей, каркас движителей непосредственно соединен стропами с системой подвеса. В сложенном состоянии мягкое крыло, стропы, электрический кабель, гибкий воздуховод и воздушные винтовые движители помещаются в ранце за спиной парашютиста, а аккумуляторы и баллон со сжатым воздухом на подвесной системе мягкого крыла (парашюта). Приведение мягкого крыла в предстартовое положение производится следующим образом; крыло извлекается из ранца, открывается клапан источника сжатого воздуха, по гибкому воздуховоду, воздух под давлением поступает в пневмокаркас мягкого крыла. Мягкое крыло принимает рабочую форму, под действием давления воздуха в пневмокаркасе.
Включаются винтовые воздушные движители. При включении, движители создают воздушный поток через отверстия в крыле перпендикулярно к земле и поднимают крыло в воздух натягивая стропы, гибкий воздуховод и электрический кабель. Мягкое крыло занимает стартовое положение. После занятия мягкого крыла (парашюта) положения над парашютистом и натяжкой строп - совершается прыжок. Причем прыжок с неподвижных объектов может совершаться с любой высоты, так как мягкое крыло (купол парашюта) с натянутыми стропами полностью раскрыт и находится над парашютистом. При приземлении парашютиста, воздух с пневмокаркаса сбрасывается в атмосферу через сбросной клапан, мягкое крыло с движителями, стропами, подвесной системой и остальными элементами мягкого крыла (парашюта) собирается в сумку и готово для транспортировки.
1Б) Летательный аппарат с мягким крылом и движителем- парашют для прыжков с высотных неподвижных объектов с функцией полета летательного аппарата в режиме горизонтальной тяги. Летательный аппарат содержит, встроенный в мягкое крыло (парашют), воздухонепроницаемый пневмокаркас со сбросным клапаном, источник сжатого воздуха, соединенный с пневмокаркасом гибким воздуховодом, систему строп соединенные с подвесной системой парашютиста и электрические кабеля соединяющие электрические воздушные винтовые движители с аккумулятором. В пневмокаркасном мягком крыле, в верхней части, выполнены два отверстия, в которых установлены и закреплены на пневмокаркасе, в кольцевой раме два воздушных винтовых движителя, содержащие электродвигатель с воздушными винтом на валу. Электродвигатели воздушных винтовых движителей имеют регуляторы оборотов, выполнены поворотными и создают воздушный поток различного направления. Для осуществления данной функции, в кольцевой раме, воздушных винтовых движителей, установлены исполнительные механизмы с электроприводом, поворачивающие электродвигатели воздушных винтовых движителей плоскостью воздушных винтов до перпендикулярного к плоскости мягкого крыла. В дополнение к данному механизму установлены механизмы с электроприводом, поворачивающие кольцевую раму в плоскости мягкого крыла, что создает большие возможности для маневра. Механизм поворота электродвигателя воздушного винтового движителя, плоскостью воздушных винтов от параллельного до перпендикулярного к плоскости мягкого крыла, установлен на кольцевой раме закрепленной на пневмокаркасе мягкого крыла в отверстиях, посажен на двух осях вращения параллельных продольной оси крыла и снабжен электроприводом поворота электродвигателя, закрепленного на осях, воздушного винтового движителя. Механизм поворачивающий кольцевую раму в плоскости мягкого крыла, снабжен электроприводом поворота кольцевой рамы в плоскости крыла, соответственно механизм поворота, установлен на кольцевой опоре жестко закрепленной на пневмокаркасе в отверстии крыла. Для снятия излишней нагрузки от воздушных винтовых движителей, каркас движителей непосредственно соединен стропами с системой подвеса. В сложенном состоянии мягкое крыло, стропы, электрический кабель, гибкий воздуховод и воздушные винтовые движители помещаются в ранце за спиной парашютиста, а аккумуляторы и баллон со сжатым воздухом на подвесной системе мягкого крыла (парашюта). Приведение мягкого крыла (парашюта) в предстартовое положение производится следующим образом; крыло извлекается из ранца, открывается клапан источника сжатого воздуха, по гибкому воздуховоду, воздух под давлением поступает в пневмокаркас мягкого крыла. Мягкое крыло принимает рабочую форму под действием давления воздуха в пневмокаркасе. Включаются винтовые воздушные движители. При включении движители, создают воздушный поток через отверстия в крыле перпендикулярно к земле и поднимают крыло в воздух натягивая стропы, гибкий воздуховод и электрический кабель. Мягкое крыло занимает стартовое положение. После занятия мягкого крыла (парашюта) положения над парашютистом и натяжкой строп - совершается прыжок. Причем прыжок с неподвижных объектов может совершаться с любой высоты, так как мягкое крыло (купол парашюта) с натянутыми стропами полностью раскрыт и находится над парашютистом. Далее, при нахождении парашютиста в воздухе, механизмом поворота, электродвигатели воздушных винтовых движителей поворачивают воздушным винтом перпендикулярно к плоскости крыла и создают поток воздуха параллельно плоскости крыла. Поток создает горизонтальную тягу и мягкое крыло (парашют) с парашютистом совершает полет в режиме летательного аппарата с горизонтальной тягой. При необходимости дополнительного маневрирования крыла в полете, применяется механизм поворачивающий воздушный винтовой движитель в режиме горизонтальной тяги при повороте кольцевой рамы в плоскости мягкого крыла, При приземлении парашютиста, тяга воздушного винтового движителя переводится в режим вертикальной тяги и парашютист совершает посадку, или посадка совершается системой управления мягкого крыла (парашютом) с помощью строп, при отключенных движителях. Управление и маневрирование мягким крылом (парашютом) - производится изменением оборотов и механизмами поворотов воздушных винтовых движителей - по электрическому кабелю или с пульта дистанционного управления, дополнительное управление мягкого крыла (парашютом) - с помощью строп. При приземлении парашютиста, воздух с пневмокаркаса сбрасывается в атмосферу через сбросной клапан, мягкое крыло с движителями, стропами, подвесной системой и другими элементами собирается в сумку и готово для транспортировки.
1В) Летательный аппарат с мягким крылом и движителем - парашют для прыжков с летательных аппаратов или высотных объектов, с высотой достаточной для раскрытия парашюта, применимо мягкое крыло (парашют) с функцией полета летательного аппарата в режиме горизонтальной тяги. Крыло (парашют) содержит; мягкое крыло, в верхней части которого выполнены два отверстия, в которых установлены и закреплены на двух кольцевых рамах, связанных между собой поперечинами, два воздушных винтовых движителя, каждый винтовой движитель содержит электродвигатель с воздушными винтом на валу, воздушные винтовые движители имеют регуляторы оборотов, выполнены поворотными и создают воздушный поток различного направления. Для осуществления данной функции, в кольцевых рамах воздушных винтовых движителей установлены исполнительные механизмы с электроприводом, поворачивающие электродвигатели воздушных винтовых движители плоскостью воздушных винтов от параллельного до перпендикулярного к плоскости мягкого крыла. В дополнение к данному механизму, установлены механизмы с электроприводом, поворачивающие кольцевую раму в плоскости мягкого крыла, что создает большие возможности для маневра. Механизм поворота электродвигателя воздушного винтового движителя, плоскостью воздушных винтов до перпендикулярного к плоскости мягкого крыла, установлен на кольцевой раме закрепленной на пневмокаркасе мягкого крыла в отверстиях, посажен на двух осях вращения параллельных продольной оси крыла и снабжен электроприводом поворота электродвигателя, закрепленного на осях, воздушного винтового движителя. Механизм, поворачивающий кольцевую раму в плоскости мягкого крыла, снабжен электроприводом поворота кольцевой рамы в плоскости крыла, соответственно механизм поворота, установлен на кольцевой опоре, жестко закрепленной в отверстии крыла. Мягкое крыло соединено стропами с подвесной системой, а электродвигатели и электроприводы мягкого крыла с аккумулятором расположенным на подвесной системе парашютиста. Для снятия излишней нагрузки от воздушных винтовых движителей, каркас движителей непосредственно соединен стропами с системой подвеса. В сложенном состоянии мягкое крыло, стропы, электрический кабель и воздушные винтовые движители помещаются в ранце за спиной парашютиста, а аккумуляторы на подвесной системе парашюта. Мягкое крыло выполненным без пневмокаркаса, Отличие от обычного парашюта только в том, что в ранец дополнительно упаковывается воздушные винтовые движители. При совершении прыжка с летательного аппарата, мягкое крыло (парашют) открывается при открытии ранца парашюта, непосредственно набегающим потоком воздуха, вытяжным парашютом или вытяжным фалом. Далее, при нахождении парашютиста в воздухе, электроприводом механизма поворота, электродвигатели воздушных винтовых движителей поворачиваются воздушным винтом, перпендикулярно к плоскости крыла и создают поток воздуха параллельно плоскости крыла. Поток создает горизонтальную тягу и ЛА (парашют) с парашютистом совершает полет в режиме летательного аппарата с горизонтальной тягой. При необходимости дополнительного маневрирования мягкого крыла в полете, применяется механизм с электроприводом поворачивающий воздушный винтовой движитель в режиме горизонтальной тяги, в плоскости мягкого крыла. При приземлении парашютиста, тяга воздушного винтового движителя переводится в режим вертикальной тяги и парашютист совершает посадку, или посадка совершается системой управления мягкого крыла (парашюта) с помощью строп при отключенных движителях. Управление и маневрирование мягким крылом (парашютом) - производится изменением оборотов и механизмами поворотов воздушных винтовых движителей - по электрическому кабелю или с пульта дистанционного управления, дополнительное управление мягким крылом (парашютом) - с помощью строп. При приземлении парашютиста, мягкое крыло с движителями, стропами, подвесной системой и другими элементами собирается в сумку и готово для транспортировки.
2А) Летательный аппарат с мягким крылом и движителем, воздушный змей - кайт для буксировки спортсмена. Кайт содержит; встроенный в мягкое крыло воздухонепроницаемый пневмокаркас с входным и сбросным клапанами, в верхней части крыла выполнены одно или два отверстия, в которых установлены и закреплены на пневмокаркасе, один или два воздушных винтовых движителя, содержащие электродвигатель с воздушными винтом на валу, направляющих воздушный поток перпендикулярно плоскости крыла - вниз. Электродвигатели воздушных винтовых движителей, установлены в отверстиях крыла в кольцевых рамах и создают воздушный поток регулируемый по величине и направлению. Каждый воздушный движитель снабжен механизмом с электроприводом, выполненным с возможностью поворота электродвигателя с воздушным винтом, в положение воздушного винта от параллельного до перпендикулярного к поверхности крыла. Механизм поворота электродвигателя воздушного винтового движителя установлен на кольцевой раме, закрепленной на каркасе мягкого крыла в отверстии, посажен на двух осях вращения, параллельных продольной оси крыла и снабжен электроприводом поворота электродвигателя, закрепленного на осях, воздушного винтового движителя. Крыло соединено системой строп с управляющими ручками (планкой) за которую держится спортсмен и управляет кайтом. Для снятия излишней нагрузки от воздушных винтовых движителей, каркас движителей непосредственно соединен с системой строп. Воздушные винтовые движителями мягкого крыла кайта, соединены электрическим кабелем с аккумулятором расположенным на спортсмене. Управление оборотами и механизмами поворотов с электроприводом воздушных винтовых движителей - по электрическому кабелю или с пульта дистанционного управления. Приведение мягкого крыла кайта в стартовое положение производится следующим образом; крыло извлекается из переносной сумки, в пневмокаркас мягкого крыла закачивается насосом воздух под давлением. Мягкое крыло принимает рабочую форму, под действием давления воздуха в пневмокаркасе. Включаются винтовые воздушные движители. При включении движители, создают воздушный поток через отверстия в крыле перпендикулярно к земле и поднимают крыло кайта в воздух натягивая стропы и электрический кабель. Мягкое крыло кайта занимает стартовое положение. После занятия крыла положения над спортсменом и натяжкой строп - ловится ветер и начинается движение спортсмена под действием тяги кайта. Далее, при нахождении крыла кайта в воздухе, маневрирование крылом в воздухе производится механизмами поворота с электроприводом и изменением тяги, по величине и направлению, воздушных винтовых движителей, которые поворачиваются воздушным винтом от параллельного до перпендикулярного к плоскости крыла и создают поток воздуха от перпендикулярного до параллельного плоскости крыла. Крыло кайта управляется так же и системой строп с управляющими ручками (планкой) за которую держится спортсмен, так же управление и маневрирование крылом кайта производится по электрическому кабелю или с пульта дистанционного управления. При приземлении кайта, воздух с пневмокаркаса сбрасывается в атмосферу через сбросной клапан, мягкое крыло кайта с движителями, стропами и другими элементами собирается в сумку и готово для транспортировки.
Отличие от существующих конструкций кайтов в новых функциональных возможностях:
* Подъем крыла в стартовую позицию возможен при любом ветре и в штиль.
* Маневрирование кайтом осуществляется как стропами так и воздушными винтовыми движителями.
* Тяга кайта осуществляется от двух источников-тяги ветра и воздушных винтовых движителей, что позволяет использовать кайт при слабом ветре и в штиль.
* Кайт способен зависать в воздухе в штиль.
* Аккумулятор расположен внизу на спортсмене, что значительно облегчает крыло, увеличивая полезную тяговую нагрузку.
2Б) Летательный аппарат с мягким крылом и движителем, тяговый кайт - для буксировки траспортных средств - например яхт и морских судов. Кайт содержит; встроенный в мягкое крыло воздухонепроницаемый пневмокаркас с сбросным клапаном, в верхней части крыла выполнены одно или два отверстия, в которых установлены и закреплены на пневмокаркасе, один или два воздушных винтовых движителя, содержащие электродвигатель с воздушными винтом на валу, направляющих воздушный поток перпендикулярно плоскости мягкого крыла - вниз. Каждый движитель снабжен механизмом с электроприводом, выполненным с возможностью поворота электродвигателя с воздушным винтом, в положение воздушного винта от параллельного до перпендикулярного к поверхности крыла. Механизм поворота электродвигателя воздушного винтового движителя установлен на кольцевой раме, жестко закрепленной на пневмокаркасе мягкого крыла в отверстии, посажен на двух осях вращения параллельных продольной оси крыла и снабжен электроприводом поворота электродвигателя, закрепленного на осях, воздушного винтового движителя. Мягкое крыло кайта соединено системой строп с барабаном электролебедки, установленной на транспортном средстве (судне), для сматывания и разматывания основных строп и электрического кабеля, электролебедки для строп управления и электролебедки для гибкого воздуховода. Гибкий воздуховод соединяет источник сжатого воздуха и пневмокаркас крыла. Электролебедки установлены на поворотных платформах для установки мягкого крыла кайта по ветру. Энергоснабжение воздушных винтовых движителей крыла, от бортового источника судна по электрическому кабелю находящегося на лебедке. Для эффективного использования ветра, в зависимости от водоизмещения судна, устанавливается одна или несколько тяговых кайтовых установок, что позволяет регулировать ветровую тягу с помощью количества запущенных кайтов. Применение кайтовых установок для мягкого крыла; с электроприводом, электрическими лебедками, системой закачки воздуха и электромагнитного сбросного воздушного клапана, позволяет быстро запускать и собирать кайты, удерживать кайты в воздухе при слабом ветре и в штиль, а так же маневрировать ими в воздухе. Запуск тягового кайта производится следующим образом; извлекается мягкое крыло кайта из отсека хранения, от источника сжатого воздуха заполняется пневмокаркас крыла, при принятии крылом кайта рабочей формы, включаются воздушные винтовые движители. Крыло кайта поднимается в воздух, натягивая стропы, кабеля электропитания и управления, а также гибкий воздуховод подачи воздуха. Крыло кайта принимает стартовое положение, разворачивается поворотными платформами лебедок в рабочее положение в зависимости от направления ветра. Включаются лебедки и крыло занимает положение в воздухе необходимое для тяги по курсу движения транспортного средства (судна) с помощью ветра. Причем нет необходимости сажать крыло кайта, при изменении курса транспортного средства (судна) при неблагоприятном ветре или в штиль, так как в воздухе при отсутствии тяги ветра мягкое крыло кайта поддерживается и маневрирует регулируемой тягой по величине и направлению, созданной воздушными винтовыми движителями. Посадка мягкого крыла кайта осуществляется при включении лебедок на «сматывание» строп, кабелей, гофрированных шлангов и сброса воздуха с пневмокаркаса крыла кайта. После сброса воздуха в пневмокаркасе крыла, крыло кайта помещается в отсек хранения. Предложенная система тяговых кайтов позволит транспортным средствам (судам) экономить большое количество топлива.
3) Летательный аппарат с мягким крылом с функцией полета летательного аппарата в режиме горизонтальной тяги и подъема мягкого крыла ЛА в стартовое положение с помощью воздушных винтовых движителей. Летательный аппарат содержит; встроенное в мягкое крыло воздухонепроницаемый пневмокаркас с входным и сбросным клапанами, в верхней части крыла выполнены два отверстия, в которых установлены и закреплены на пневмокаркасе в кольцевой раме, два воздушных винтовых движителя, содержащие электродвигатель с воздушным винтом на валу. Воздушные винтовые движители имеют регуляторы оборотов, выполнены поворотными и создают воздушный поток различной силы и направления. Для осуществления данной функции, в каркас воздушных винтовых движителей установлены исполнительные механизмы с электроприводом, поворачивающие электродвигатели воздушных винтовых движителей плоскостью воздушных винтов от параллельного до перпендикулярного к плоскости мягкого крыла и как дополнение к данному механизму - механизмы с электроприводом, поворачивающие кольцевую раму механизма поворота в плоскости мягкого крыла, что создает большие возможности для маневра. Механизм поворота воздушного винтового движителя, плоскостью воздушных винтов от параллельного до перпендикулярного к плоскости мягкого крыла, установлен на кольцевой раме закрепленной на каркасе мягкого крыла в отверстиях, посажен на двух осях вращения параллельных продольной оси крыла и снабжен электроприводом поворота электродвигателя, закрепленного на осях, воздушного винтового движителя. Механизм поворачивающие кольцевую раму в плоскости мягкого крыла, снабжен электроприводом поворота кольцевой рамы в плоскости крыла, соответственно механизм поворота, установлен на кольцевой опоре, жестко закрепленной на пневмокаркасе в отверстии крыла. Мягкое крыло соединено стропами с подвесной системой пилота, а электродвигатели и электропривода соединены электрическим кабелем с аккумулятором закрепленным на подвесной системе. Для снятия излишней нагрузки от воздушных винтовых движителей, каркас движителей непосредственно соединен стропами с системой подвеса. Управление оборотами и механизмами поворотов воздушных винтовых движителей - по электрическому кабелю или с пульта дистанционного управления. В сложенном состоянии мягкое крыло, стропы, электрический кабель, воздушные винтовые движители, аккумулятор помещаются в переносной сумке. Пневмокаркас заполняется воздухом с помощью обычного насоса и снабжен входным и сбросным клапанами. Летательный аппарат запускается с земли или небольшой возвышенности. Приведение мягкого крыла в стартовое положение происходит при включении воздушных винтовых движителей в положении вектора тяги перпендикулярно к земле. После занятия мягкого крыла положения над пилотом и натяжкой строп - совершается разбег пилота и взлет. При этом устанавливаются воздушные винтовые движители вектором тяги под углом к земле. При наборе высоты воздушные движители переводится в режим горизонтального вектора тяги. Посадка летательного аппарата производится с помощью изменения вектора тяги воздушных винтовых движителей или в режиме парашюта.
4) Летательный аппарат с мягким крылом - мотопараплан, с функцией подъема мягкого крыла ЛА в стартовое положение с помощью воздушных винтовых движителей. Летательный аппарат содержит; встроенный в мягкое крыло воздухонепроницаемый пневмокаркас с входным и сбросным клапанами, в верхней части крыла выполнены два отверстия, в которых установлены и закреплены на пневмокаркасе, два воздушных винтовых движителя, содержащие электродвигатель с воздушными винтом на валу, создающие при включении воздушных винтовых движителей вектора тяги перпендикулярно к земле. Мотопараплан-летательный аппарат снабжен маршевым парамотором горизонтальной тяги, закрепленным на спине спортсмена или на платформе тележки. Мягкое крыло соединено стропами с подвесной системой пилота или с платформой тележки. Для снятия излишней нагрузки от воздушных винтовых движителей, каркас движителей непосредственно соединен стропами с системой подвеса. Воздушные винтовые движителями мягкого крыла, соединены электрическим кабелем с аккумулятором расположенным на пилоте или на платформе тележки. Управление оборотами - по электрическому кабелю или с пульта дистанционного управления. В сложенном состоянии мягкое крыло, стропы, электрический кабель, воздушные винтовые движители и аккумулятор помещаются в отсеке платформы тележки или переносной сумке. Пневмокаркас заполняется воздухом, как вариант с помощью обычного насоса и снабжен входным и сбросным клапаном. Летательный аппарат запускается с земли или небольшой возвышенности. Приведение мягкого крыла в предстартовое положение происходит при включении воздушных винтовых движителей в положении вектора тяги перпендикулярно к земле. После занятия мягкого крыла положения над пилотом и натяжкой строп, включается парамотор, совершается разбег и происходит взлет мотопараплана. Посадка летательного аппарата производится аналогично существующим мотопарапланам или в режиме парашюта. Отличие предлагаемого летательного аппарата от существующих мотопарапланов - дополнительными возможностями создаваемые подъемом мягкого крыла в стартовое положение в штиль и небольшом ветре.
5) Летательный аппарат вертикального взлета и посадки с мягким крылом с функцией подъема мягкого крыла ЛА в стартовое положение с помощью воздушных винтовых движителей. Летательный аппарат содержит; встроенный в мягкое крыло воздухонепроницаемый пневмокаркас с входным и сбросным клапанами, в верхней части крыла выполнены два отверстия, в которых установлены и закреплены в кольцевой раме жестко на пневмокаркасе, два воздушных винтовых движителя. Воздушный винтовой движитель содержит электродвигатель с воздушными винтом на валу, создающий при включении воздушных винтовых движителей, воздушный поток с вектором тяги перпендикулярно к земле. Мягкое крыло соединено стропами с кабиной (фюзеляжем) летательного аппарата. Для снятия излишней нагрузки от воздушных винтовых движителей, рама воздушных винтовых движителей непосредственно соединена стропами с кабиной ЛА. Воздушные винтовые движителями мягкого крыла, соединены электрическим кабелем с источником питания расположенным в отсеке, где установлена, как вариант электролебедка для сматывания-разматывания строп, электрического кабеля, гибкого воздуховода соединенного с источником сжатого воздуха, расположенным в верхней части кабины. По внешнему периметру кабины пилота установлены поворотные тяговые воздушные движители, с вектором тяги потока воздуха от перпендикулярного до горизонтального к земле, с регулируемой тягой, как по величине, так и направлению. Как вариант, движители установлены жестко соединенными с корпусом, с перпендикулярным и горизонтальным потоком, с вертикальной и горизонтальной регулируемой тягой. Как вариант, возможна установка жестко закрепленных и поворотных тяговых движителей. Тяговые воздушные движители расположены по периметру, попарно симметрично относительно продольной оси ЛА, их количество от двух до нескольких, главное, что бы суммарная тяга всех движителей при подъеме, спуске и маневрировании аппарата поддерживался режим многороторного вертолета. В режиме горизонтального полета, работает подъемная сила мягкого крыла и тяговые поворотные движители в режиме горизонтальной тяги, возможны и варианты, в зависимости от комплектации тяговыми воздушными движителями. Приведение мягкого крыла в предстартовое положение или его сборка производится на земле, а при наличии электролебедки сматывающие-разматывающие стропы, электрический кабель и гибкий воздуховод, возможно и при зависании летательного аппарата в воздухе в вертолетном режиме, что может быть полезно в стесненных городских условиях.. Летательный аппарат запускается с любой площадки вертикально. Запуск ЛА производится следующим образом; извлекается мягкое крыло ЛА из отсека хранения, от источника сжатого воздуха заполняется пневмокаркас крыла, при принятии крылом рабочей формы, включаются воздушные винтовые движители. Крыло ЛА поднимается в воздух, натягивая стропы, кабеля электропитания и управления, а также гибкий воздуховод подачи воздуха. После занятия мягкого крыла положения над кабиной ЛА и натяжкой строп, включаются тяговые, расположенные по периметру кабины, поворотные (или жестко закрепленные) воздушные движители с тягой перпендикулярно к поверхности земли. ЛА поднимается в воздух в режиме многороторного вертолета, тягой создаваемой движителями в режиме перпендикулярной тяги. При достижение заданной высоты, ЛА переходит в горизонтальный полет. Горизонтальная тяга в режиме горизонтального полета обеспечивается поворотом тяговых движителей в режим горизонтальной тяги, или движителями горизонтальной тяги, при исполнении ЛА с жестко закрепленными движителями горизонтальной тяги. Посадка ЛА вертикального взлета и посадки производится в режиме многороторного вертолета, при включении тяговых движителей в режиме тяги перпендикулярной к земле. После завершения посадки, сбрасывается воздух с пневмокаркаса, сматываются стропы, электрические кабеля, и мягкий воздуховод. Крыло помещается в отсек хранения.
Летательный аппарат с мягким крылом вертикального взлета и посадки с функцией подъема мягкого крыла ЛА в стартовое положение с помощью воздушных винтовых движителей, служат базой для создания летательных аппаратов, как пилотируемых, так и БПЛА по своим функциональным возможностям аналогичны конвертопланам но гораздо их дешевле, что позволит найти свою нишу в линейке летательных аппаратов, с грузоподъемностью от килограмма до десятков тонн, то есть ЛА для перевозки на внешней подвеске крупногабаритных грузов. Так же найдет применение: в системе МЧС в качестве ЛА, возможно БПЛА, оборудованным оборудованием пожаротушения, для автоматизированной доставки грузов от 1 кг до сотен кг, в качестве летающего автомобиля низкой стоимости, например скорой помощи.
На листе 1 изображены:
1) Фиг. 1 мягкое крыло с двумя воздушными винтовыми движителями. Вид сверху.
2) Фиг. 2 мягкое крыло с двумя винтами с противоположным вращением от одного движителя. Вид сверху.
На листе 2 изображен:
3) Фиг. 3 воздушный винтовой движитель с механизмом поворота винта до перпендикулярного к плоскости мягкого крыла. Вид сверху.
На листе 3 изображены:
4) Фиг. 4 воздушный винтовой движитель с механизмом поворота винта до перпендикулярного к плоскости мягкого крыла и поворота в плоскости мягкого крыла. Вид сверху.
5) Фиг. 5 электролебедка для сматывания-разматывания строп, электрокабеля и гибкого воздуховода.
На листе 4 изображены:
6) Фиг. 6 мягкое крыло с функцией тягового кайта установленного на яхте.
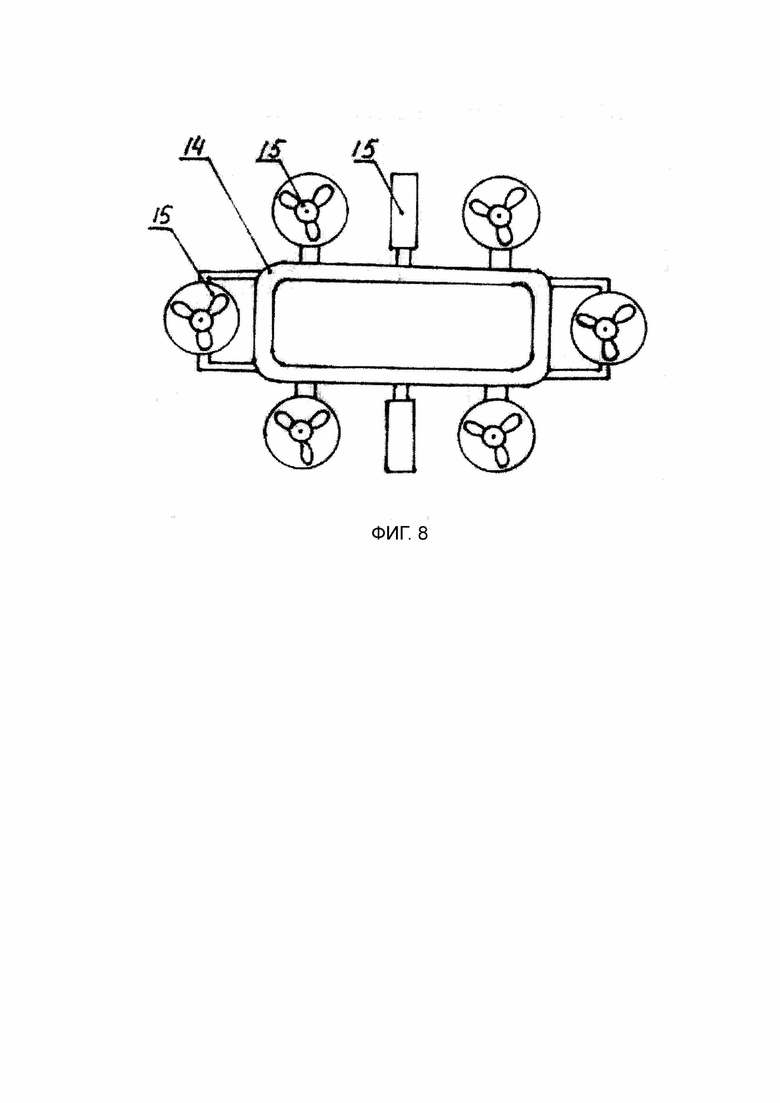
7) Фиг. 7 летательный аппарат вертикального взлета и посадки с поворотными тяговыми движителями (движители в горизонтальном положении). Вид спереди.
На листе 5 изображено:
8) Фиг. 8 возможное расположение как неподвижных так и поворотных тяговых движителей на раме летательного аппарата вертикального взлета и посадки (указано без мягкого крыла), Вид сверху.
Летательный аппарат, в различных вариантах, с мягким крылом состоит из следующих элементов: мягкого крыла 1, содержащий воздухонепроницаемый пневмокаркас 2 со сбросным и входным клапаном. Мягкое крыло 1 соединенное стропами 10 с системой подвеса закрепленным на перемещаемом объекте, например; ранца, корпуса летательного аппарата (фюзеляжа), или с корпуса транспортного средства.. Для подъема в воздух мягкого крыла 1, в нем выполнено одно или несколько отверстий, в которых в кольцевой раме 4 закреплены воздушные винтовые движители 3, содержащие электродвигатель с воздушным винтом на валу. Электродвигатели и электропривода, соединены электрическими кабелями, с источником питания, расположенным ниже системы подвеса строп 10. Воздушные винтовые движители создают при подъеме мягкого крыла, перпендикулярный к плоскости мягкого крыла, воздушный поток через отверстия. Электродвигатель воздушного винтового движителя 3, в варианте поворота плоскости воздушного винта от параллельного до перпендикулярного к плоскости мягкого крыла 1, закреплен на двух осях 5 вращения параллельных продольной оси крыла и снабжен электроприводом поворота 6, закрепленного на осях 5, воздушного винтового движителя 3. Механизм поворачивающие в плоскости мягкого крыла 1, снабжен электроприводом поворота кольцевой рамы 4 в плоскости крыла 1, дополнительно установлена кольцевая опора 7, в отверстии крыла1, на которой закреплен привод поворота 8 поворачивающий раму 4 в плоскости мягкого крыла 1. Летательный аппарат для быстрого сматывания - разматывания строп 10, электрокабеля 11 и гибкого воздуховода 12 снабжен электролебедкой 9, которая устанавливается например на яхте 13, на поворотной платформе. Мягкое крыло 1, является тяговым кайтом и используется в качестве паруса. Летательные аппараты вертикального взлета и посадки, снабженные мягким крылом 1, имеют: раму 14 с установленными тяговыми воздушными движителями 15, расположенными по периметру фюзеляжа летательного аппарата. Тяговые воздушные движетели15 выполнены, как неподвижными, так и поворотными или в их комбинации.
Летательные аппараты с мягким крылом работают следующим образом: мягкое крыло 1, при наполнении воздухом пневмокаркаса 2, расправляется и принимает аэродинамический объем, запускаются электродвигатели воздушных винтовых движителей 3. Электродвигатели создают воздушный поток направленным вниз перпендикулярно к земле. Воздушный поток, имеющий вектор тяги направленный вверх, поднимает мягкое крыло 1 в воздух, натягиваются соединенные с крылом 1 стропы 10, электрический кабель 11 и гибкий воздуховод 12. Мягкое крыло 1 устанавливается в стартовое положение. Дальнейшие манипуляции с мягким крылом 1 зависят от принадлежности к классу летательных аппаратов. Для ЛА высокой маневренности и дальность полета, для которых воздушные движители крыла являются так же тяговыми, после подъеме в воздух ЛА, для горизонтального полета, включаются воздушные винтовые движителя 3, с изменяемыми направлениями потока воздуха и векторами тяги, и осуществляется дополнительное маневрирование мягкого крыла 1 в полете, что желательно например: в конструкции воздушных змеев и устройств на их основе, тяговых кайтов, парашютов в форме крыла и летательных аппаратов на их основе. Воздушные винтовые движители 3 изменяют тягу по величине при изменение оборотов двигателей воздушных винтовых движителей 3, и по направлению, при поворотах в кольцевой раму 4 воздушных винтовых движителей 3 исполнительными механизмами 6 с электроприводами поворачивающие воздушные винтовые движители 3, плоскостью воздушных винтов, до перпендикулярного к плоскости мягкого крыла 1. Так же изменение направление тяги производится поворотом в плоскости мягкого крыла 1, поворотным механизмом 8, поворачивающую кольцевую раму 4, что создает большие возможности для маневра крыла 1.
Варианты исполнения ЛА с мягким крылом.
1. А) Летательный аппарат с мягким крылом и движителем - парашют для прыжков с высотных неподвижных объектов. Летательный аппарат содержит; встроенный в мягкое крыло1 (парашют), воздухонепроницаемый пневмокаркас 2 со сбросным клапаном, расположенного на подвесной системе парашюта источник сжатого воздуха, соединенный с пневмокаркасом 2 гибким воздуховодом 12, систему строп 10 соединенные с подвесной системой парашютиста. В пневмокаркасном мягком крыле 1, в верхней части, выполнены одно или два отверстия, в которых установлены и закреплены на пневмокаркасе 2, один или два воздушных винтовых движителя 3, содержащие электродвигатель с воздушными винтом на валу, направляющих воздушный поток перпендикулярно плоскости крыла 1 - вниз. Электродвигатели и электропривода воздушных винтовых движителей 3, соединены электрическим кабелем 11 с аккумулятором расположенном на подвесной системе парашютиста. В сложенном состоянии мягкое крыло 1, стропы 10, электрический кабель 11, гибкий воздуховод 12 и воздушные винтовые движители 3 помещаются в ранце за спиной парашютиста, а аккумуляторы и баллон со сжатым воздухом на подвесной системе мягкого крыла (парашюта).
Приведение мягкого крыла 1 (парашюта) в предстартовое положение производится следующим образом; крыло 1 извлекается из ранца, открывается клапан источника сжатого воздуха, по гибкому воздуховоду 12, воздух под давлением поступает в пневмокаркас 2 мягкого крыла 1. Мягкое крыло 1 принимает рабочую форму, под действием давления воздуха в пневмокаркасе 2. Включаются электродвигатели винтовых воздушных движителий 3. При включении движители 3, создают воздушный поток через отверстия в мягком крыле 1 перпендикулярно к земле и поднимают крыло 1 в воздух натягивая стропы 10, электрический кабель 11 и гибкий воздуховод 12. Мягкое крыло 1 занимает стартовое положение. После занятия купола крыла 1 положения над парашютистом и натяжкой строп - совершается прыжок. Причем прыжок с неподвижных объектов может совершаться с любой высоты, так как мягкое крыло (купол парашюта) с натянутыми стропами 10 полностью раскрыт и находится над парашютистом. При приземлении парашютиста, воздух с пневмокаркаса 2 сбрасывается в атмосферу через сбросной клапан, мягкое крыло 2 с движителями 3, стропами 10, подвесной системой и остальными элементами собирается в сумку и готово для транспортировки.
1Б) Летательный аппарат с мягким крылом и движителем - парашют для прыжков с высотных неподвижных объектов с функцией полета летательного аппарата в режиме горизонтальной тяги. Летательный аппарат содержит; встроенный в мягкое крыло 1 (парашют), воздухонепроницаемый пневмокаркас 2 со сбросным клапаном, расположенного на подвесной системе парашюта источник сжатого воздуха, соединенный с пневмокаркасом 2 гибким воздуховодом 12, систему строп 10 и электрических кабелей соединенных с подвесной системой ЛА мягкого крыла (парашюта). В пневмокаркасном мягком крыле 1, в верхней части, выполнены два отверстия, в которых установлены и закреплены на пневмокаркасе 2, два воздушных винтовых движителя 3, содержащие электродвигатель с воздушными винтом на валу. Воздушные винтовые движители 3 имеют регуляторы оборотов, выполнены поворотными и создают воздушный поток различного направления. Для осуществления данной функции, в каркас воздушных винтовых движителей 3 установлены исполнительные механизмы 6 с электроприводом, поворачивающие воздушные винтовые движители 3 плоскостью воздушных винтов от параллельного до перпендикулярного к плоскости мягкого крыла 1 и как дополнение к данному механизму - механизмы 8 поворачивающие эти механизмы 6 в плоскости мягкого крыла 1, что создает большие возможности для маневра. Механизм поворота воздушного винтового движителя, плоскостью воздушных винтов от параллельного до перпендикулярного к плоскости мягкого крыла, установлен на кольцевой раме 4 закрепленной на каркасе мягкого крыла 1 в отверстиях, посажен на двух осях 5 вращения параллельных продольной оси крыла 1 и снабжен электроприводом поворота 6, закрепленного на осях 5, воздушного винтового движителя 3. Механизм поворачивающий кольцевую раму 4 в плоскости мягкого крыла, снабжен электроприводом поворота 8 кольцевой рамы 4 в плоскости крыла, соответственно механизм поворота 8, установлен на кольцевой опоре 7, жестко закрепленной на пневмокаркасе 2 в отверстии крыла 1. Мягкое крыло1 соединено стропами 10 с подвесной системой. Для снятия излишней нагрузки от воздушных винтовых движителей 3, каркас движителей 3 непосредственно соединен стропами 10 с системой подвеса. В сложенном состоянии мягкое крыло 1, стропы 10, электрический кабель 11, гибкий воздуховод 12 и воздушные винтовые движители 3 помещаются в ранце за спиной парашютиста, а аккумуляторы и баллон со сжатым воздухом на подвесной системе парашюта.
Приведение мягкого крыла 1 в стартовое положение производится следующим образом; крыло 1 извлекается из ранца, открывается клапан источника сжатого воздуха, по гибкому воздуховоду 12, воздух под давлением поступает в пневмокаркас 2 мягкого крыла 1. Мягкое крыло 1 принимает рабочую форму, под действием давления воздуха в пневмокаркасе 2. Включаются электродвигатели винтовых воздушных движителей 3. При включении движители 3, создают воздушный поток через отверстия в мягком крыле 1 перпендикулярно к земле и поднимают мягкое крыло 1 в воздух, натягивая стропы 10. Мягкое крыло 1 занимает стартовое положение. После занятия мягкого крыла 1 положения над парашютистом и натяжкой строп 10 - совершается прыжок. Причем прыжок с неподвижных объектов может совершаться с любой высоты, так как мягкое крыло (купол парашюта) с натянутыми стропами полностью раскрыт и находится над парашютистом. Далее, при нахождении парашютиста в воздухе, механизмом поворота с электроприводом 6, электродвигатели воздушных винтовых движителей 3 поворачиваются воздушным винтом перпендикулярно к плоскости крыла 1 и создают поток воздуха параллельно плоскости мягкого крыла 1. Поток создает горизонтальную тягу и ЛА- мягкое крыло1 (парашют) с парашютистом совершает полет в режиме летательного аппарата с горизонтальной тягой. При необходимости дополнительного маневрирования мягкого крыла 1 в полете, включается механизм 8 с электроприводом поворачивающий воздушный винтовой движитель 3 в режиме горизонтальной тяги, в плоскости мягкого крыла 1. При приземлении парашютиста, тяга воздушного винтового движителя 3 переводится в режим вертикальной тяги и парашютист совершает посадку, или посадка совершается системой управления ЛА с мягким крылом (парашютом) с помощью строп 10, при отключенных движителях 3. Управление и маневрирование ЛА с мягким крылом (парашютом)-производится изменением оборотов и механизмами поворотов 6 и 8 воздушных винтовых движителей 3- по электрическому кабелю 11 или с пульта дистанционного управления, дополнительное управление мягким крылом (парашютом)- с помощью строп 10. При приземлении парашютиста, воздух с пневмокаркаса 2 сбрасывается в атмосферу через сбросной клапан, мягкое крыло 1 с движителями 3, стропами 10, подвесной системой и другими элементами мягкого крыла (парашюта) собирается в сумку и готово для транспортировки.
1В) Летательный аппарат с мягким крылом и движителем - парашют для прыжков с летательных аппаратов или высотных объектов, с высотой достаточной для раскрытия парашюта, применим ЛА с мягким крылом (парашют) с функцией полета летательного аппарата в режиме горизонтальной тяги. ЛА (парашют) содержит; мягкое крыло 1, в верхней части которого выполнены два отверстия, в которых установлены и закреплены на двух кольцевых рамах 4 связанных между собой поперечинами, два воздушных винтовых движителя 3, содержащие электродвигатель с воздушными винтом на валу, воздушные винтовые движители 3 имеют регуляторы оборотов, выполнены поворотными и создают воздушный поток различного направления. Для осуществления данной функции, в каркас воздушных винтовых движителей 3 установлены исполнительные механизмы 6, поворачивающие воздушные винтовые движители 3 плоскостью воздушных винтов от параллельного до перпендикулярного к плоскости мягкого крыла 1 и как дополнение к данному механизму 6 - механизмы 8 поворачивающие кольцевую раму 4 в плоскости мягкого крыла 1, что создает большие возможности для маневра. Механизм поворота воздушного винтового движителя 3, плоскостью воздушных винтов до перпендикулярного к плоскости мягкого крыла 1, установлен на кольцевой раме 4, закрепленной на мягком крыле 1 в отверстиях, посажен на двух осях 5 вращения параллельных продольной оси крыла 1 и снабжен электроприводом поворота 6, закрепленного на осях 5, воздушного винтового движителя 3. Механизм поворачивающие в плоскости мягкого крыла 1, снабжен электроприводом поворота 8 кольцевой рамы 4 в плоскости крыла, соответственно механизм поворота 8, установлен на кольцевой опоре 7 жестко закрепленной в отверстии крыла 1. Мягкое крыло 1 соединен стропами 10 с подвесной системой. Для снятия излишней нагрузки от воздушных винтовых движителей 3, каркас движителей 3 непосредственно соединен стропами 10 с системой подвеса. В сложенном состоянии мягкое крыло 1, стропы 10, электрический кабель 11 и воздушные винтовые движители 3 помещаются в ранце за спиной парашютиста, а аккумуляторы на подвесной системе ЛА с мягким крылом (парашюта). Мягкое крыло 1 выполненным без пневмокаркаса, Отличие от обычного парашюта только в том, что в ранец дополнительно упаковывается воздушные винтовые движители 3 и электрические кабеля.
При совершении прыжка с летательного аппарата, мягкое крыло (парашют) раскрывается непосредственно набегающим воздушным потоком при раскрытии ранца, или вытяжным парашютом, или вытяжным фалом. Далее, при нахождении парашютиста в воздухе, механизмом поворота 6, электродвигатели воздушных винтовых движителей 3, поворачиваются воздушным винтом перпендикулярно к плоскости мягкого крыла 1 и создают поток воздуха параллельно плоскости крыла. Поток создает горизонтальную тягу и ЛА с мягким крылом (парашют) с парашютистом совершает полет в режиме летательного аппарата с горизонтальной тягой. При необходимости дополнительного маневрирования крыла 1 в полете, применяется механизм 8 поворачивающий воздушный винтовой движитель 3 в режиме горизонтальной тяги, в плоскости мягкого крыла. При приземлении парашютиста, тяга воздушного винтового движителя 3 переводится в режим вертикальной тяги и парашютист совершает посадку, или посадка совершается системой управления ЛА с мягким крылом (парашютом) с помощью строп 10 при отключенных движителях 3. Управление и маневрирование ЛА с мягким крылом (парашютом) - производится изменением оборотов и механизмами поворотов 6 и 8 воздушных винтовых движителей 3 - по электрическому кабелю или с пульта дистанционного управления, дополнительное управление с помощью строп 10. При приземлении парашютиста, мягкое крыло 1 с движителями 3, стропами 10, подвесной системой и другими элементами собирается в сумку и готово для транспортировки.
2А) Летательный аппарат с мягким крылом и движителем, воздушный змей - кайт для буксировки спортсмена. Кайт содержит; встроенный в мягкое крыло 1, воздухонепроницаемый пневмокаркас 2 с входным и сбросным клапанами, в верхней части крыла 1 выполнены одно или два отверстия, в которых установлены и закреплены на пневмокаркасе 2, один или два воздушных винтовых движителя 3, содержащие электродвигатель с воздушными винтом на валу, направляющих воздушный поток перпендикулярно плоскости крыла - вниз. Воздушные винтовые движители 3 установлены в отверстиях крыла 1 кайта жестко или, в отверстиях установлены соответственно один или два воздушными винтовыми движителями 3, состоящие из электродвигателя с воздушным винтом на валу, создающими поток различного направления. Каждый движитель 3 снабжен механизмом с электроприводом 6, выполненным с возможностью поворота электродвигателя с воздушным винтом в положение воздушного винта от параллельного до перпендикулярного к поверхности крыла 1. Механизм поворота воздушного винтового движителя 3 установлен на кольцевой раме 4, жестко закрепленной на пневмокаркасе 2 мягкого крыла 1 в отверстии, посажен на двух осях 5 вращения параллельных продольной оси крыла 1 и снабжен электроприводом поворота 6, закрепленного на осях 5, воздушного винтового движителя 3. Крыло 1 соединено системой строп 10 с управляющими ручками (планкой) за которую держится спортсмен и управляет крылом кайта. Для снятия излишней нагрузки от воздушных винтовых движителей 3, каркас движителей 3 непосредственно соединен с системой строп 10. Воздушные винтовые движителями 3 крыла кайта, соединены электрическим кабелем 11 с аккумулятором расположенным на спортсмене. Управление оборотами и механизмами поворотов 6 воздушных винтовых движителей - по электрическому кабелю 11 или с пульта дистанционного управления.
Приведение мягкого крыла 1 кайта в предстартовое положение производится следующим образом; крыло 1 извлекается из переносной сумки, в пневмокаркас 2 крыла 1 закачивается насосом воздух под давлением. Мягкое крыло 1 принимает рабочую форму, под действием давления воздуха в пневмокаркасе 2. Включаются винтовые воздушные движители 3. При включении движители 3, создают воздушный поток через отверстия в крыле 1 перпендикулярно к земле и поднимают крыло 1 кайта в воздух натягивая стропы 10 и электрические кабеля 11. Мягкое крыло 1 кайта занимает стартовое положение. После занятия крыла 1 положения над спортсменом и натяжкой строп 10 -ловится ветер и начинается движение спортсмена под действием тяги кайта. Далее, при нахождении крыла 1 кайта в воздухе, маневрирование крылом 1 в воздухе производится электроприводами 6 механизмами поворота и изменением тяги, по величине и направлению, воздушных винтовых движителей 3, которые поворачиваются воздушным винтом от параллельного до перпендикулярного к плоскости крыла 1 и создают поток воздуха от перпендикулярного до параллельного плоскости крыла1. Крыло 1 управляется так же и системой строп 10 с управляющими ручками (планкой) за которую держится спортсмен и так же управление и маневрирование крылом кайта - по электрическому кабелю 11 или с пульта дистанционного управления. При приземлении крыла кайта, воздух с пневмокаркаса 2 сбрасывается в атмосферу через сбросной клапан, мягкое крыло 1 кайта с движителями 3, стропами 10 и другими элементами собирается в сумку и готово для транспортировки. Подъем крыла кайта в воздух возможен как при слабом ветре так и в штиль.
2Б) Летательный аппарат с мягким крылом и движителем, тяговый кайт - для буксировки транспортных средств - например яхт, морских судов. Летательный аппарат содержит; встроенный в мягкое крыло 1 воздухонепроницаемый пневмокаркас 2 с сбросным клапанам, в верхней части крыла 1 выполнены одно или два отверстия, в которых установлены и закреплены на пневмокаркасе 2, один или два воздушных винтовых движителя 3, содержащие электродвигатель с воздушными винтом на валу, направляющих воздушный поток перпендикулярно плоскости крыла 1 - вниз. Каждый движитель снабжен механизмом, выполненным с возможностью поворота электродвигателя воздушного винта в положение воздушного винта от параллельного до перпендикулярного к поверхности крыла 1. Механизм поворота электродвигателя воздушного винтового движителя установлен на кольцевой раме 4, жестко закрепленной на пневмокаркасе 2 мягкого крыла 1 в отверстии, посажен на двух осях 5 вращения параллельных продольной оси крыла 1 и снабжен электроприводом поворота 6, закрепленного на осях 5, воздушного винтового движителя. Крыло 1 соединено с соответствующими барабанами электролебедок 9, установленной на транспортном средстве (судне), для сматывания и разматывания основных тяговых строп 10, электрического кабеля 11, строп управления 10 и гибкого воздуховода 12. Гибкий воздуховод 12 соединяет источник сжатого воздуха и пневмокаркас 2 крыла 1. Пневмокаркас 2 выполнен со сбросным клапаном и входным клапаном закачки воздуха Электролебедки 9 установлены на поворотных платформах для установки крыла кайта по ветру. Энергоснабжение воздушных винтовых движителей 3 крыла 1, от бортового источника судна по электрическому кабелю 11 находящегося на поворотной платформе. Для эффективного использования ветра, в зависимости от водоизмещения судна, устанавливается одна или несколько тяговых кайтовых установок, что позволяет регулировать ветровую тягу с помощью количества запущенных кайтов..
Запуск тягового кайта производится следующим образом; извлекается мягкое крыло 1 кайта из отсека хранения, от источника сжатого воздуха заполняется пневмокаркас 2 крыла 1, при принятии крылом 1 кайта рабочей формы, включаются воздушные винтовые движители 3. Крыло 1 кайта поднимается в воздух, натягивая стропы 10, кабеля 11 электропитания и управления и гибкий воздуховод 12. Крыло 1 принимает стартовое положение, разворачивается поворотными платформами лебедок 9 в рабочее положение в зависимости от направления ветра. Включаются лебедки 9 и крыло 1 занимает положение в воздухе необходимое для тяги по курсу движения транспортного средства (судна) с помощью ветра. Причем нет необходимости сажать крыло кайта, при изменении курса транспортного средства (судна) при неблагоприятном ветре или в штиль, так как в воздухе при отсутствии тяги ветра мягкое крыло 1 кайта поддерживается и маневрирует регулируемой тягой по величине и направлению, созданной воздушными винтовыми движителями 3. Посадка мягкого крыла 1 кайта осуществляется при включении лебедок на «сматывание» строп 10, кабелей 11, гибкого воздуховода 12 и сброса воздуха с пневмокаркаса 2 крыла 1 кайта. После сброса воздуха в пневмокаркасе 2 крыла 1, крыло 1 кайта помещается в отсек хранения. Предложенная система тяговых кайтов позволит транспортным средствам (судам) экономить большое количество топлива.
3) Летательный аппарат с мягким крылом с функцией полета летательного аппарата в режиме горизонтальной тяги и подъема мягкого крыла ЛА в стартовое положение с помощью воздушных винтовых движителей, Летательный аппарат содержит; встроенный в мягкое крыло 1 воздухонепроницаемый пневмокаркас 2 с входным и сбросным клапанами, в верхней части крыла 1 выполнены два отверстия, в которых установлены и закреплены на пневмокаркасе 2, два воздушных винтовых движителя 3, содержащие электродвигатель с воздушными винтом на валу. Воздушные винтовые движители 3 имеют регуляторы оборотов, выполнены поворотными и создают воздушный поток различного направления. Для осуществления данной функции, в каркас воздушных винтовых движителей 3 установлены исполнительные механизмы с электроприводом 6, поворачивающие электродвигатели воздушных винтовых движителей 3 плоскостью воздушных винтов от параллельного до перпендикулярного к плоскости мягкого крыла 1. Механизм поворота воздушного винтового движителя 3, плоскостью воздушных винтов от параллельного до перпендикулярного к плоскости мягкого крыла 1, установлен на кольцевой раме 4 жестко закрепленной на каркасе мягкого крыла 1 в отверстиях, посажен на двух осях 5 вращения параллельных продольной оси крыла 1 и снабжен электроприводом 6 поворота, закрепленного на осях 5, воздушного винтового движителя. В дополнение к данному механизму, установлены механизмы с электроприводом 8, поворачивающие кольцевую раму 4 в плоскости мягкого крыла 1, что создает большие возможности для маневра. Соответственно механизм поворота с электроприводом 8, установлен на кольцевой опоре 7, жестко закрепленной на пневмокаркасе 2 в отверстии крыла 1. Мягкое крыло 1 соединен стропами 10 с подвесной системой пилота. Для снятия излишней нагрузки от воздушных винтовых движителей 3, каркас движителей 3 непосредственно соединен стропами 10 с системой подвеса. Воздушные винтовые движителями 3 мягкого крыла 1, соединены электрическим кабелем 11 с аккумулятором расположенным на пилоте. Управление оборотами и механизмами поворотов воздушных винтовых движителей 3 - по электрическому кабелю 11 или с пульта дистанционного управления. В сложенном состоянии мягкое крыло 1, стропы 10, электрический кабель 11, воздушные винтовые движители 3, аккумулятор помещаются в переносной сумке. Пневмокаркас 2 заполняется воздухом с помощью обычного насоса и снабжен входным и сбросным клапанами.
Летательный аппарат запускается с земли или небольшой возвышенности. Запуск ЛА производится следующим образом; извлекается мягкое крыло 1 из переносной сумки, насосом заполняется пневмокаркас 2 крыла 1, при принятии крылом 1 рабочей формы включаются воздушные винтовые движители 3. При включении воздушных винтовых движителей 3 в положении вектора тяги перпендикулярно к земле. После занятия мягкого крыла 1 положения над пилотом и натяжкой строп 10 - совершается разбег пилота и взлет. При этом устанавливаются воздушные винтовые движители 3 вектором тяги под углом к земле. При наборе высоты воздушные движители 3 переводится в режим горизонтального вектора тяги. Посадка летательного аппарата производится с помощью изменения вектора тяги воздушных винтовых движителей 3 или в режиме парашюта.
4) Летательный аппарат с мягким крылом - мотопараплан, с функцией подъема мягкого крыла ЛА в стартовое положение с помощью воздушных винтовых движителей. Летательный аппарат содержит; встроенный в мягкое крыло 1, воздухонепроницаемый пневмокаркас 2 с входным и сбросным клапанами, в верхней части крыла 1 выполнены два отверстия, в которых установлены на кольцевой раме 4 и закреплены на пневмокаркасе 2, два воздушных винтовых движителя 3, содержащие электродвигатель с воздушными винтом на валу, создающие при включении воздушных винтовых движителей 3 вектора тяги перпендикулярно к земле. Мотопараплан - летательный аппарат снабжен маршевым парамотором горизонтальной тяги закрепленным на спине спортсмена или на платформе тележки. Мягкое крыло 1 соединен стропами 10 с подвесной системой пилота или с платформой тележки. Для снятия излишней нагрузки от воздушных винтовых движителей 3, каркас движителей 3 непосредственно соединен стропами 10 с системой подвеса. Воздушные винтовые движителями 3 мягкого крыла 1, соединены электрическим кабелем 11 с аккумулятором расположенным на пилоте или на платформе тележки. Управление оборотами - по электрическому кабелю 11 или с пульта дистанционного управления. В сложенном состоянии мягкое крыло 1, стропы 10, электрический кабель 11, воздушные винтовые движители 3 и аккумулятор помещаются в отсеке платформы тележки или переносной сумке. Пневмокаркас 2 заполняется воздухом, как вариант с помощью обычного насоса и снабжен входным и сбросным клапаном.
Летательный аппарат запускается с земли или небольшой возвышенности. Запуск ЛА производится следующим образом; извлекается мягкое крыло 1 из переносной сумки, насосом заполняется пневмокаркас 2 крыла 1, при принятии крылом 1 рабочей формы включаются воздушные винтовые движители 3 создающие вектор тяги воздушного потока перпендикулярно к земле. После занятия мягкого крыла 1 положения над пилотом и натяжкой строп 10, включается парамотор, совершается разбег и происходит взлет мотопараплана. Посадка летательного аппарата производится аналогично существующим мотопарапланам, с помощью установки воздушных винтовых движителей 3 в режим перпендикулярной тяги и отключении парамотора, или в режиме парашюта.
5) Летательный аппарат вертикального взлета и посадки с мягким крылом с функцией подъема мягкого крыла ЛА в стартовое положение с помощью воздушных винтовых движителей. Летательный аппарат содержит; встроенный в мягкое крыло 1 воздухонепроницаемый пневмокаркас 2 с входным и сбросным клапанами, в верхней части крыла 1 выполнены два отверстия, в которых установлены и закреплены на пневмокаркасе 2, два воздушных винтовых движителя 3, состоящие из электродвигателя с воздушными винтом на валу, создающие при включении воздушных винтовых движителей 3 воздушный поток с вектором тяги перпендикулярно к земле. Мягкое крыло 1 соединено стропами 10 с кабиной (фюзеляжем) летательного аппарата. Для снятия излишней нагрузки от воздушных винтовых движителей 3, каркас воздушных винтовых движителей 3 непосредственно соединена стропами 10 с кабиной ЛА. Воздушные винтовые движителями 3 мягкого крыла 1, соединены электрическим кабелем 11 с источником питания расположенным в отсеке, где установлена, как вариант, электролебедка для сматывания-разматывания строп 10, электрического кабеля 11, гибкого воздуховода 12 соединенного с источником сжатого воздуха, расположенным в кабине ЛА. По внешнему периметру кабины пилота, на раме 14 установлены поворотные тяговые воздушные движители 15, с вектором тяги потока воздуха от перпендикулярного до горизонтального к земле, с регулируемой тягой, как по величине, так и направлению. Как вариант, движители 15 установлены жестко соединенными с корпусом, с перпендикулярным и горизонтальным потоком, с вертикальной и горизонтальной регулируемой тягой. Как вариант, возможна установка жестко закрепленных и поворотных тяговых движителей 15. Тяговые воздушные движители 15 расположены по периметру, попарно симметрично относительно продольной оси ЛА, их количество от двух до нескольких, главное, что бы суммарная тяга всех движителей при подъеме, спуске и маневрировании аппарата поддерживался режим многороторного вертолета. В режиме горизонтального полета, работает подъемная сила мягкого крыла и тяговые поворотные движители в режиме горизонтальной тяги, возможны и варианты, в зависимости от комплектации тяговыми воздушными движителями.
Летательный аппарат запускается с любой площадки вертикально. Запуск ЛА производится следующим образом; извлекается мягкое крыло 1 ЛА из отсека хранения, от источника сжатого воздуха заполняется пневмокаркас 2 крыла 1, при принятии крылом 1 рабочей формы, включаются воздушные винтовые движители 3. Крыло 1 ЛА поднимается в воздух, натягивая стропы 10, кабеля 11 электропитания и управления, а также гибкий воздуховод 12 подачи воздуха.
После занятия мягкого крыла 1 положения над кабиной ЛА и натяжкой строп 10, включаются тяговые, расположенные по периметру кабины, поворотные (или жестко закрепленные) воздушные движители 15 с тягой перпендикулярно к поверхности земли. ЛА поднимается в воздух в режиме многороторного вертолета, тягой создаваемой движителями 15 в режиме перпендикулярной тяги. При достижение заданной высоты, ЛА переходит в горизонтальный полет. Горизонтальная тяга в режиме горизонтального полета обеспечивается поворотом тяговых движителей 15 в режим горизонтальной тяги, или движителями горизонтальной тяги 15, при исполнении ЛА с жестко закрепленными движителями 15 горизонтальной тяги. Посадка ЛА вертикального взлета и посадки производится в режиме многороторного вертолета, при включении тяговых движителей 15 в режиме тяги перпендикулярной к земле. После завершения посадки, сбрасывается воздух с пневмокаркаса 2, сматываются стропы 10, электрические кабеля 11, и мягкий воздуховод 12. Крыло 1 помещается в отсек хранения.
Технический эффект предлагаемых летательных аппаратов заключается в использовании как обычных, так и режимов вертикального взлета и посадки аппаратов, с экономичным и маневренным мягким крылом. Данный технический эффект достигается тем, что мягкое крыло выполнено с пневмокаркасом наполненным воздухом. При старте поднимается в воздух воздушными винтовыми движителями с управляемой тягой, установленными в отверстиях мягкого крыла, поднимая за собой стропы и электрический кабель питания, а при необходимости и гибкий воздуховод от источника сжатого воздуха, установкой по периметру платформы аппарата тяговых воздушных движителей с изменяемыми векторами тяги, применением электролебедок для эффективного роспуска и сборки мягкого крыла. Все выше перечисленное обеспечивает заявленный технический эффект предложенного изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОДЪЁМА И МАНЕВРИРОВАНИЯ В ПОЛЁТЕ МЯГКИМ КРЫЛОМ ЛЕТАТЕЛЬНОГО АППАРАТА | 2024 |
|
RU2828629C1 |
| Способ подъёма в стартовое положение мягкого крыла летательного аппарата | 2023 |
|
RU2821148C1 |
| Летательный аппарат вертикального взлёта и посадки с изменяемым направлением тяги движителей | 2019 |
|
RU2790454C2 |
| ТРАСПОРТНОЕ СРЕДСТВО С КРЫЛОМ | 2019 |
|
RU2722732C1 |
| ТРЕНАЖЕР ПАРАШЮТИСТА-ДЕСАНТНИКА И СПОСОБ ДИНАМИЧЕСКОГО СОПРОВОЖДЕНИЯ ОБУЧЕНИЯ НА НЕМ | 2016 |
|
RU2653900C1 |
| Способ подготовки парашютистов и устройство его реализующее | 2019 |
|
RU2730759C1 |
| Способ подготовки парашютистов на тренажере воздушно-десантной подготовки и устройство его реализующее | 2021 |
|
RU2769481C1 |
| ТРАНСПОРТНАЯ СИСТЕМА ДЛЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ ВЕРТИКАЛЬНОГО ВЗЛЁТА И ПОСАДКИ | 2020 |
|
RU2790417C2 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ПРИ ДВИЖЕНИИ ПОЕЗДА МЕТРОПОЛИТЕНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ С ПРИМЕНЕНИЕМ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2022 |
|
RU2829794C2 |
| Тренажер для наземной подготовки парашютиста | 2023 |
|
RU2806470C1 |
Изобретение относится к авиационной технике, в частности к конструкциям летательных аппаратов (ЛА) с мягким крылом. Летательный аппарат с мягким крылом состоит из мягкого крыла (1), содержащего воздухонепроницаемый пневмокаркас (2) со сбросным и входным клапаном. Мягкое крыло (1) соединено стропами (10) с системой подвеса, закрепленной на ранце, или корпусе летательного аппарата, или корпусе транспортного средства. Для подъема в воздух мягкого крыла (1) в нем выполнено одно или несколько отверстий, в которых в кольцевой раме (4) закреплены электродвигатели с воздушными винтами. Электродвигатели и электропривода соединены электрическими кабелями с источником питания, расположенным ниже системы подвеса строп (10). Электродвигатель воздушного винтового движителя (3), имеющий возможность поворота плоскости воздушного винта от параллельного до перпендикулярного к плоскости мягкого крыла (1), закреплен на двух осях вращения (5), закрепленных на кольцевой раме (4). Обеспечивается возможность подъема мягкого крыла без воздействия внешнего воздушного потока - ветра. 5 н. и 7 з.п. ф-лы, 9 ил.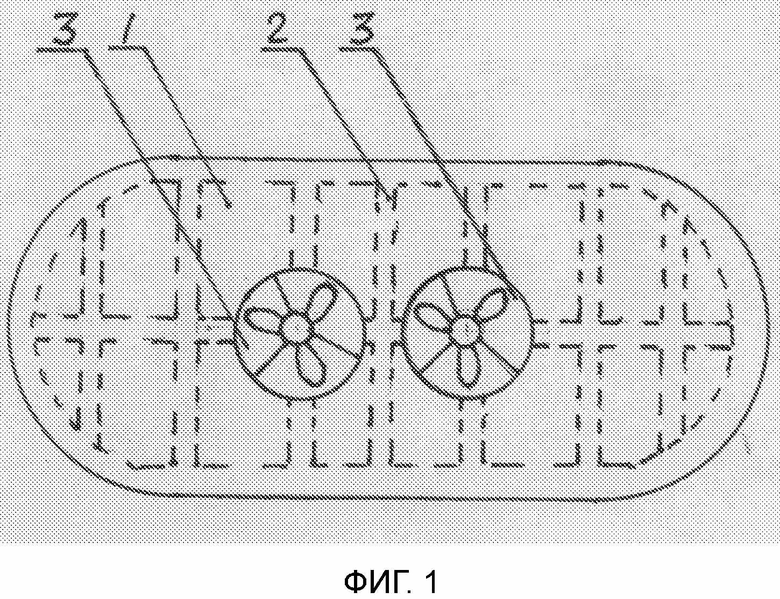
1. Летательный аппарат с мягким крылом (1) и движителем (3), содержащий воздухонепроницаемый пневмокаркас (2) со сбросным клапаном, источник сжатого воздуха, соединенный с упомянутым пневмокаркасом гибким воздуховодом (12), систему строп (10), соединенных с подвесной системой спортсмена, и по меньшей мере один движитель (3), выполненный с возможностью создавать поток воздуха и включающий источник питания, отличающийся тем, что он снабжен вторым движителем, упомянутое крыло выполнено по меньшей мере с двумя отверстиями, а каждый упомянутый движитель включает электродвигатель с воздушным винтом на валу, закреплен в соответствующем упомянутом отверстии на пневмокаркасе (2) с возможностью создавать поток воздуха через упомянутое отверстие.
2. Летательный аппарат по п. 1, отличающийся тем, что он выполнен в виде парашюта, а упомянутый источник питания в виде аккумулятора.
3. Летательный аппарат по п. 2, отличающийся тем, что каждый упомянутый движитель снабжен механизмом (6), выполненным с возможностью поворота упомянутого электродвигателя воздушного винта в положении воздушного винта от параллельного до перпендикулярного к поверхности упомянутого крыла (1).
4. Летательный аппарат по п. 3, отличающийся тем, что каждый упомянутый движитель снабжен опорой (7), механизмом (6), ось (5) которого закреплена на раме (4).
5. Летательный аппарат с мягким крылом (1) и движителем (3), содержащий воздухонепроницаемый пневмокаркас (2) со сбросным клапаном, источник сжатого воздуха, соединенный с упомянутым пневмокаркасом гибким воздуховодом (12), стропы (10), соединенные с подвесной системой спортсмена, и по меньшей мере один движитель (3), выполненный с возможностью создавать поток воздуха и включающий источник питания, отличающийся тем, что упомянутое крыло выполнено по меньшей мере с одним отверстием, а упомянутый движитель включает электродвигатель с воздушным винтом на валу, при этом движитель закреплен на упомянутом пневмокаркасе с возможностью создавать поток воздуха через упомянутое отверстие, упомянутая подвесная система снабжена ранцем, источник питания выполнен в виде аккумуляторов, которые электрическим кабелем соединены с упомянутым электродвигателем и размещены с источником сжатого воздуха на упомянутой подвесной системе, ранец которой выполнен с возможностью разместить упомянутое крыло, стропы, электрический кабель, гибкий воздуховод и движитель.
6. Летательный аппарат по п. 5, отличающийся тем, что он выполнен в виде парашюта, а упомянутый источник питания в виде аккумулятора.
7. Летательный аппарат по п. 2, отличающийся тем, что каждый упомянутый движитель снабжен механизмом (6), выполненным с возможностью поворота упомянутого электродвигателя воздушного винта в положении воздушного винта от параллельного до перпендикулярного к поверхности упомянутого крыла (1).
8. Летательный аппарат с мягким крылом (1) и движителем (3), содержащий воздухонепроницаемый пневмокаркас (2) со сбросным клапаном, источник сжатого воздуха, соединенный с упомянутым пневмокаркасом гибким воздуховодом (12), стропы (10), соединенные с подвесной системой спортсмена, и по меньшей мере один движитель (3), выполненный с возможностью создавать поток воздуха и включающий источник питания, отличающийся тем, что он снабжен пультом управления упомянутым движителем, а упомянутое крыло снабжено дополнительной системой строп, соединенной с управляющими ручками планки, и выполнено по меньшей мере с одним отверстием, а упомянутый движитель включает электродвигатель с воздушным винтом на валу, при этом движитель закреплен на упомянутом пневмокаркасе с возможностью создавать поток воздуха через упомянутое отверстие.
9. Летательный аппарат по п. 8, отличающийся тем, что он выполнен в виде тягового кайта.
10. Летательный аппарат по п. 9, отличающийся тем, что каждый упомянутый движитель снабжен механизмом (6), выполненным с возможностью поворота упомянутого электродвигателя воздушного винта в положении воздушного винта от параллельного до перпендикулярного к поверхности упомянутого крыла (1).
11. Летательный аппарат с мягким крылом (1) и движителем (3), содержащий воздухонепроницаемый пневмокаркас (2) со сбросным клапаном, источник сжатого воздуха, соединенный с упомянутым пневмокаркасом гибким воздуховодом (12), стропы (10), соединенные с подвесной системой спортсмена, и по меньшей мере один движитель (3), выполненный с возможностью создавать поток воздуха и включающий источник питания, отличающийся тем, что он снабжен дополнительным движителем в виде параматора, выполненного с возможностью закрепления на спине спортсмена или на платформе тележки, упомянутое крыло выполнено по меньшей мере с одним отверстием, а упомянутый движитель включает электродвигатель с воздушным винтом на валу, при этом движитель закреплен на упомянутом пневмокаркасе с возможностью создавать поток воздуха через упомянутое отверстие.
12. Летательный аппарат с мягким крылом (1) и движителем (3), содержащий воздухонепроницаемый пневмокаркас (2) со сбросным клапаном, источник сжатого воздуха, соединенный с упомянутым пневмокаркасом гибким воздуховодом (12), стропы (10), соединенные с подвесной системой спортсмена, и по меньшей мере один движитель (3), выполненный с возможностью создавать поток воздуха и включающий источник питания, отличающийся тем, что он выполнен в виде летательного аппарата вертикального взлета и посадки, снабжен кабиной пилота, по периметру которой установлены дополнительные тяговые поворотные воздушные движители с системой регулирования тяги по величине и направлению, а также с механизмом поворота и фиксации, верхняя часть кабины имеет отсек хранения крыла, где упомянутое крыло выполнено по меньшей мере с одним отверстием, при этом движитель закреплен на упомянутом пневмокаркасе с возможностью создавать поток воздуха через упомянутое отверстие, а каждый упомянутый движитель включает электродвигатель с воздушным винтом на валу.
| WO 2006077315 A1, 27.07.2006 | |||
| US 6824098 B1, 30.11.2004 | |||
| МЯГКОЕ ГАЗОНАПОЛНЯЕМОЕ КРЫЛО | 1997 |
|
RU2121943C1 |

