СП
ел
со
tc
4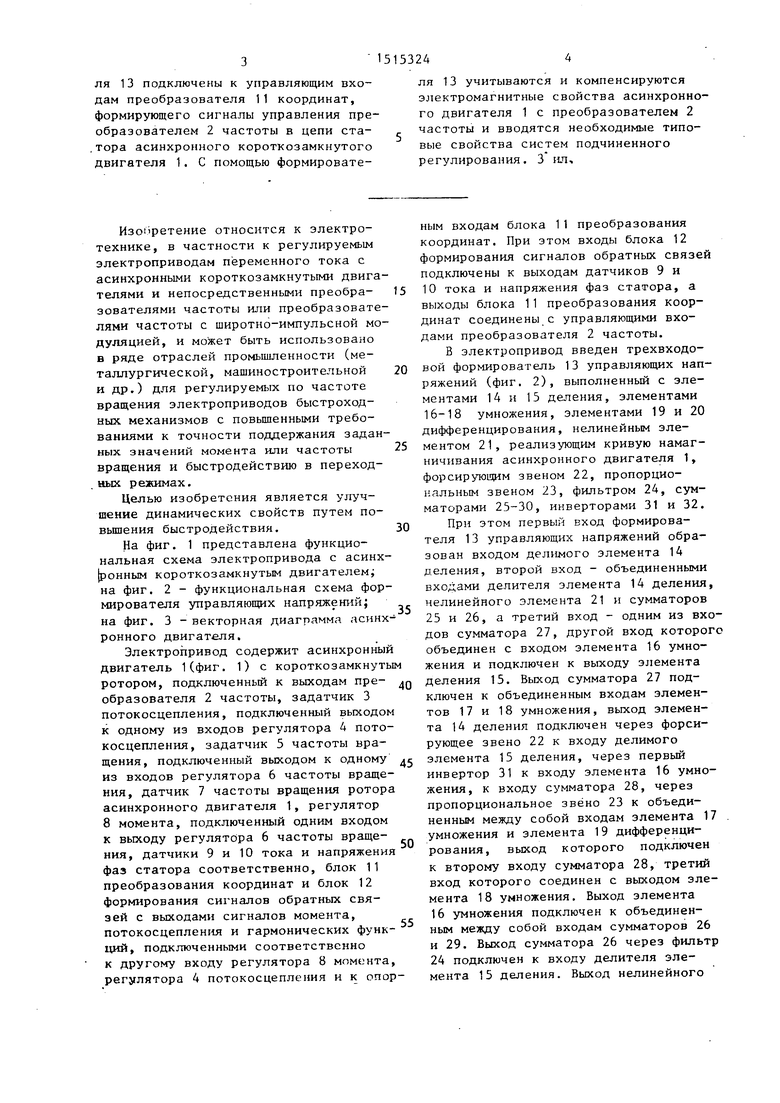
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электропривод | 1987 |
|
SU1439727A1 |
| Частотно-управляемый электропривод | 1988 |
|
SU1527701A1 |
| Вентильный электропривод | 1984 |
|
SU1205246A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Частотно-регулируемый асинхронный электропривод | 1981 |
|
SU1046891A1 |
| Устройство для испытания механической трансмиссии | 1988 |
|
SU1585704A1 |
| Устройство для частотного управления асинхронным двигателем | 1978 |
|
SU744887A1 |
| Электропривод переменного тока | 1987 |
|
SU1429272A1 |
| Способ управления асинхронным электродвигателем и устройство для его осуществления | 1981 |
|
SU1443110A1 |
Изобретение относится к электротехнике и может быть использовано в металлургической и машиностроительной промышленности. Целью изобретения является улучшение динамических свойств путем повышения быстродействия. В электропривод введен трехвходовый формирователь 13 управляющих напряжений. Входы формирователя 13 подключены соответственно к выходам регулятора 8 момента, регулятора 4 потокосцепления и датчика 7 частоты вращения. Выходы формирователя 13 подключены к управляющим входам преобразователя 11 координат, формирующего сигналы управления преобразователем 2 частоты в цепи статора асинхронного короткозамкнутого двигателя 1. С помощью формирователя 13 учитываются и компенсируются электромагнитные свойства асинхронного двигателя 1 с преобразователем 2 частоты и вводятся необходимые типовые свойства систем подчиненного регулирования. 3 ил.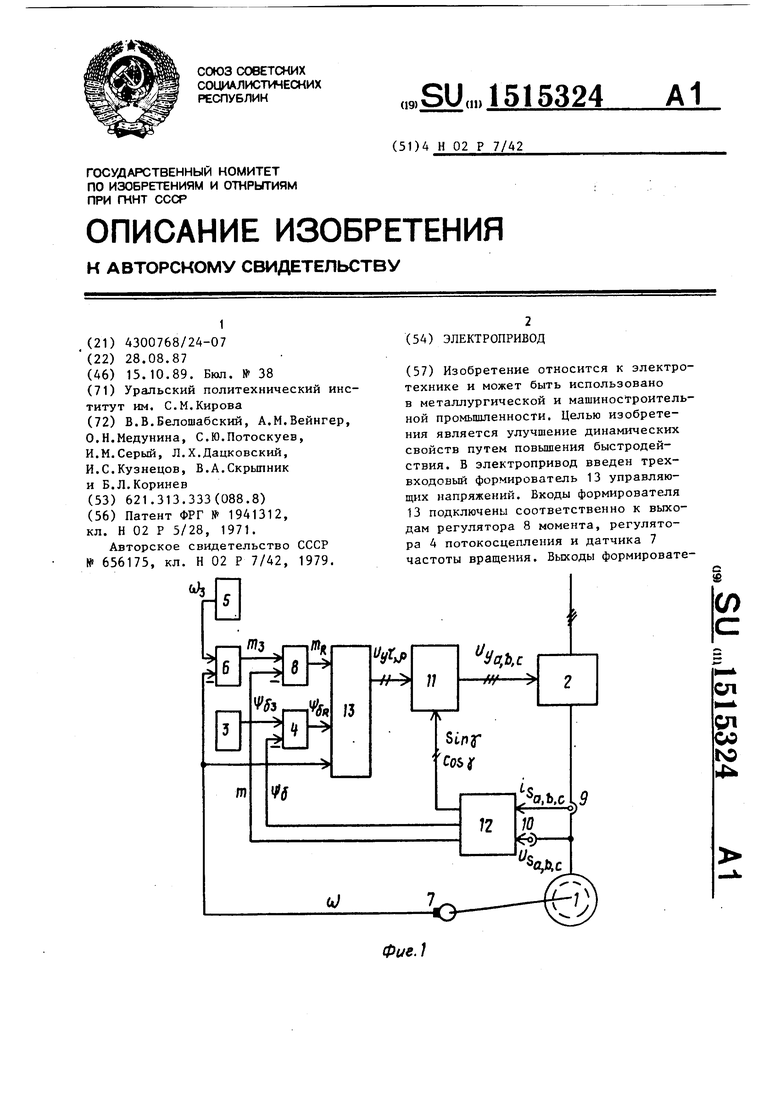
Фие.1
3
ля 13 подключены к управляющим входам преобразователя 11 координат, формирующего сигналы управления преобразователем 2 частоты в цепи ста- ,тора асинхронного короткозамкнутого двигателя 1. С помощью формировате
Изобретение относится к электротехнике, в частности к регулируемым электроприводам переменного тока с асинхронными короткозамкнутыми двигателями и непосредственными преобра- зователями частоты или преобразователями частоты с широтно-импульсной модуляцией, и может быть использовано в ряде отраслей промышленности (металлургической, машиностроительной и др.) для регулируемых по частоте вращения электроприводов быстроходных механизмов с повышенными требованиями к точности поддержания заданных значений момента или частоты вращения и быстродействию в переходных режимах.
Целью изобретения является улучшение динамических свойств путем повышения быстродействия.
На фиг. 1 представлена функциональная схема электропривода с асинх- ронным короткозамкнутым двигателем; на фиг. 2 - функциональная схема формирователя управляющих напряжений; на фиг. 3 - векторная диаграмма асинхронного двигателя.
Электропривод содержит асинхронный двигатель 1(фиг. 1) с короткозамкнуты ротором, подключенный к выходам пре- образователя 2 частоты, задатчик 3 потокосцепления, подключенный вьгходом к одному из входов регулятора А потокосцепления, задатчик 5 частоты вращения, подключенный выходом к одному из входов регулятора 6 частоты вращения, датчик 7 частоты вращения ротора асинхронного двигателя 1, регулятор 8 момента, подключенный одним входом к выходу регулятора 6 частоты вращения, датчики 9 и 10 тока и напряжения фаз статора соответственно, блок 11 преобразования координат и блок 12 формирования сигналов обратных связей с выходами сигналов момента, потокосцепления и гармонических функций, подключенными соответственно к другому входу регулятора 8 момента регулятора 4 потокосцепления и к опор
ля 13 учитываются и компенсируются электромагнитные свойства асинхронного двигателя 1 с преобразователем 2 частоты и вводятся необходимые типовые свойства систем подчиненного регулирования. З ил.
5 0 5
0
д 0
5
ным входам блока 11 преобразования координат. При этом входы блока 12 формирования сигналов обратных связей подключены к выходам датчиков 9 и 10 тока и напряжения фаз статора, а выходы блока 11 преобразования координат соединены с управляющими входами преобразователя 2 частоты.
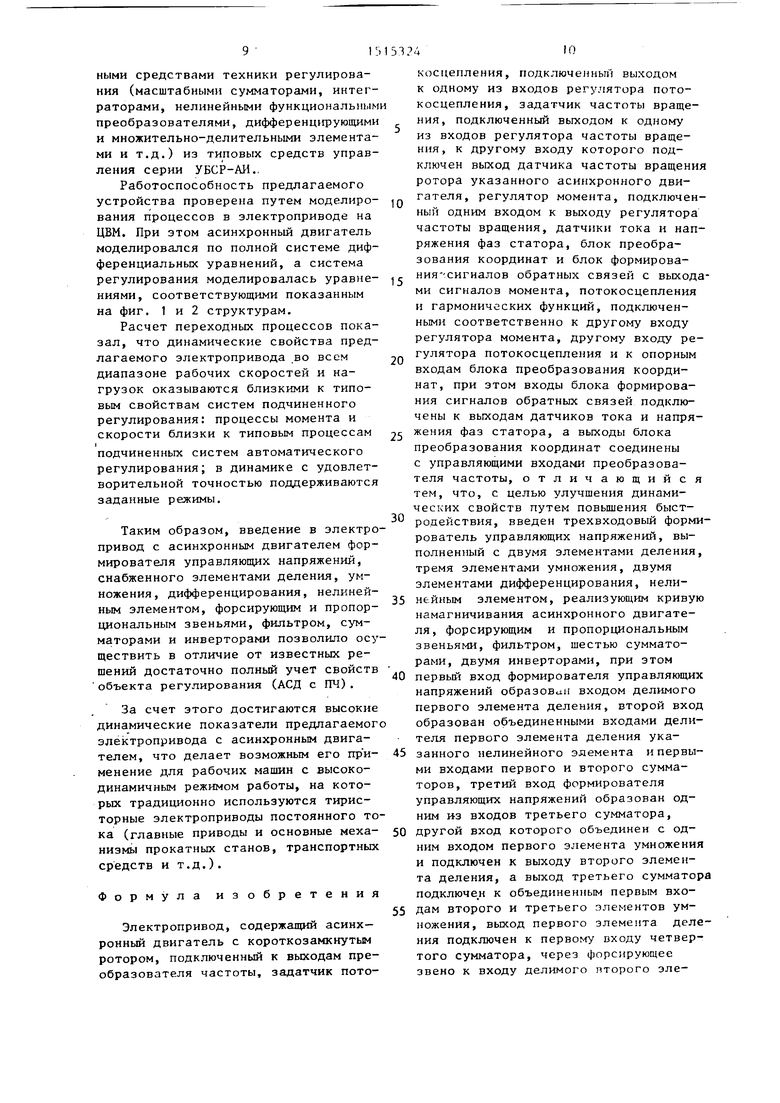
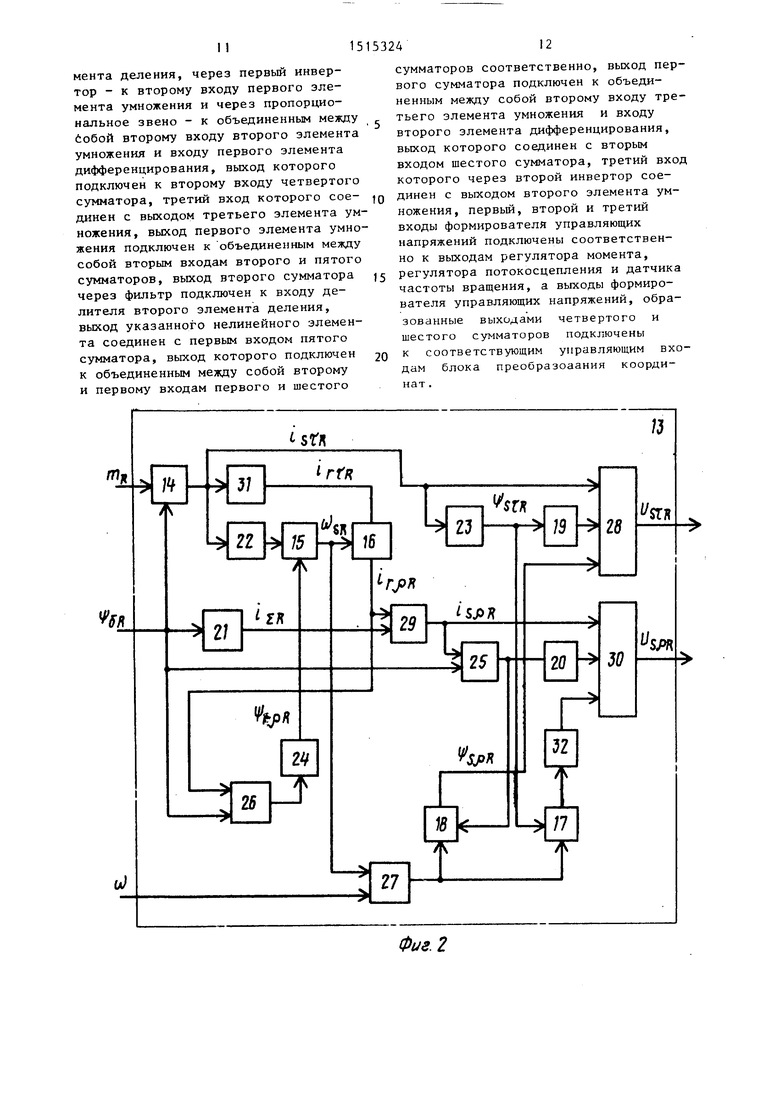
В электропривод введен трехвходо- вой формирователь 13 управляющих напряжений (фиг. 2), выполненньй с элементами 14 н 15 деления, элементами 16-18 умножения, элементами 19 и 20 дифференцирования, нелинейным элементом 21, реализующим кривую намагничивания асинхронного двигателя 1, форсирующим звеном 22, пропорциональным звеном 23, фильтром 24, сумматорами 25-30, инверторами 31 и 32.
При этом первый вход формирователя 13 управляющих напряжений образован входом делимого элемента 14 деления, второй вход - объединенными входами делителя элемента 14 деления, нелинейного элемента 21 и сумматоров 25 и 26, а третий вход - одним из входов сумматора 27, другой вход которого объединен с входом элемента 16 умножения и подключен к выходу элемента деления 15. Выход сумматора 27 подключен к объединенным входам элементов 17 и 18 умножения, выход элемента 14 деления подключен через форсирующее звено 22 к входу делимого элемента 15 деления, через первый инвертор 31 к входу элемента 16 умножения, к входу сумматора 28, через пропорциональное звено 23 к объединенным между собой входам элемента 17 . умножения и элемента 19 дифференцирования, выход которого подключен к второму входу сумматора 28, третий вход которого соединен с выходом элемента 18 умножения. Выход элемента 16 умножения подключен к объединенным между собой входам сумматоров 26 и 29. Выход сумматора 26 через фильтр 24 подключен к входу делителя элемента 15 деления. Выход нелинейного
1
элемента 21 соединен с входом сумматора 29, выход которого подключен к объединенным между собой входам сумматоров 25 и 30. Выход сумматора 25 подключен к объединенным между собой входам элемента 18 умножения и элемента 20 дифференцирования, выход которого соединен с вторым входом сумматора 30, третий вход которого через инвертор 32 соединен с выходом элемента 17 умножения. Первый, второй и третий входы формирователя 13 управляющих напряжений подключены соответственно к выходам регулятора момента 18, регулятора потокосцепле- ния 4 и датчика частоты вращения 7. Выходы формирователя 13 управляющих напряжений, образованные выходами сумматоров 28 и 30, подключены к соответствующим управляющим входам блока 11 преобразования координат.
В системе автоматического регулирования (САР) электропривода образованы два замкнутых контура регулирования: внешний контур регулирования частоты вращения с регулятором частоты вращения и внутренний контур регулирования момента. Требуемое электромагнитное состояние двигателя обеспечивается контуром регулирования потока асинхронного двигателя. Синтез САР проведен на основе теории нелинейных многосвязных систем подчиненного регулирования и с учетом свойств асинхронного двигателя при питании от непосредственного преобразователя частоты или преобразователя частоты с широтно-импульсной модуляцией как объекта регулирования. Особенностью структуры САР является использование вращающейся системы координат, ориентированной по основному потоку асинхронного двигателя.
Электропривод работает следующим образом.
Сигналы задания потокосцепления (fe и частоты вращения и, двигателя 1 с выходов задатчиков 3 и 5 поступают соответственно на входы регуляторов А и 6, где они сравниваются с сигналами действительных значений потокосцепления Ц j и частоты вращения U), поступающими от блока 12 формирования сигналов обратных связей и датчика 7 частоты вращения. Заданное значение момента Ш1 асинхронного двигателя с выхода регулятора 6 подается на вход регулятора 8 момента, где
5324 ,
сравнивается с сигналом действительного значения момента ш, поступающим с соответствующего выхода блока
5 12.
Формирование в блоке 12 гармонических функций ainv , соа |-осуществляется на основании сигналов токов - Чо,ь,с и напряжений - Us „ ь фаз
д ПО соотношениям (использованы обозначения, общепринятые в аналитической теории мащин переменного тока; все переменные и параметры, кроме времени и постоянных времени, представлены 15 в от носительных единицах) :
Vs -isp- « sp (1)
,
V vV - T/b (2)
I
. f.
coa f --- (3)
V,/r d.iT subci.p () .Л.сГ ,b,c- isaXc dt (5)
Sa,
2- I- 3 S b 3 SC
isp
2 1 1 sd 3 Vsb 3 + scl
sb-
(6)
(6a)
Величины определяются с помощью операционных усилителей в режиме 35 интегрирования по формуле (5).
Регуляторы 4 и 8 потокосцепления и момента имеют передаточные функции:
W(P)
1
(Т + Т Р)
(7)
где Т. - постоянная времени, выбираемая в соответствии с требованиями к электроприводу и определяющая .быстродействие 45 системы автоматического регу-лирования.
Регуляторы обеспечивают равенство момента и потокосцепления их заданным значениям в установившихся режимах 50 работы электропривода.
Выходные сигналы регулятора 8 момента (ш({) , регулятора 4 потокосцепления ((), датчика 7 частоты вращения (ы) подаются соответственно на 55 первый - третий входы формирователя 13 управляющих напряжений, на выходе которого формируются сигналы управления р для преобразователя частоты 2 на основании следующих уравнений.
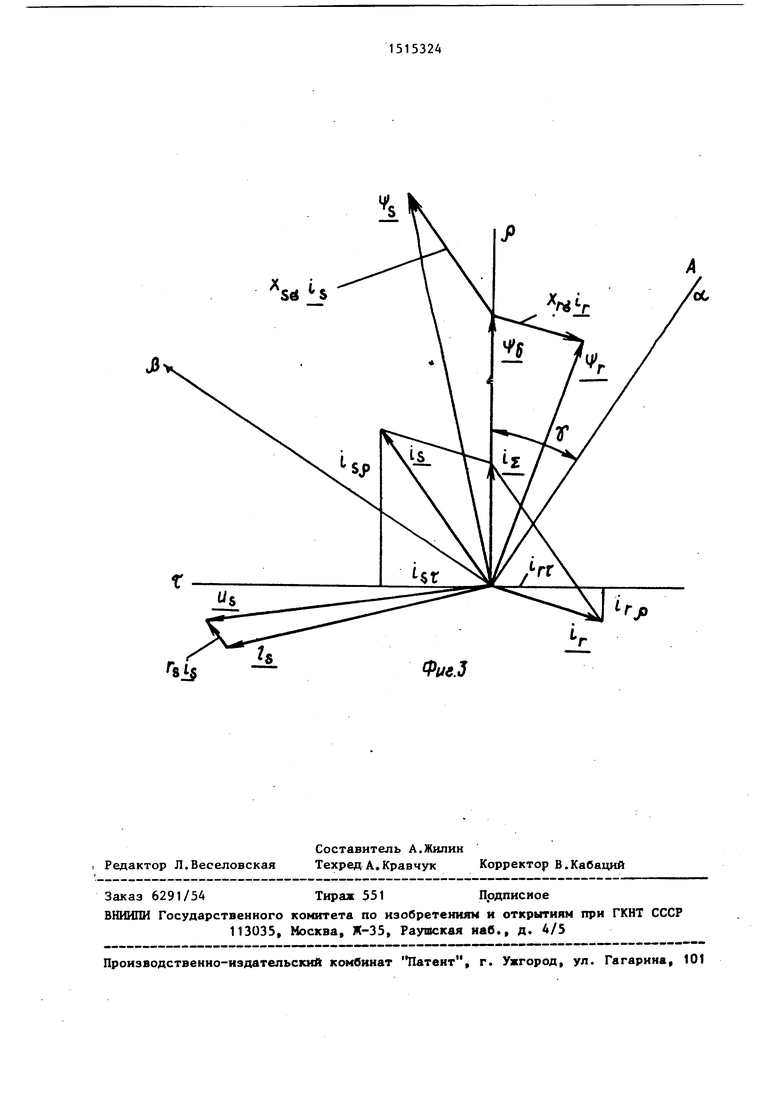
описывающих работу асинхронного корот- козамкнутого двигателя в системе координат J3 , 1 , ориентированной по вектору основного потока двигателя , (фиг. 3):
Ug РЧ, -ы, Vsc +rsispi (8) UsO + (xJKVsp + Tsis- (9) О Piy y rt + (10) 0 +Ws Vrp+ ; (11),o
Цр isp+ i.
s-C r-O
1 rT -1 cc ;
(12)
f(i), (13)
t cf , i.rt s6 (1-) 15
Vji + VpJ,Vrt i.-Xru)O5)
, I/ H :
m
«г
(16)
где Ыц углов-ая скорость вращения
системы координат;
5 (Г угловая скорость ара- щения системы координат относительно ротора. С помощью формирователя 13 управляющих напряжений, структура которог составлена в соответствии с структур ной схемой асинхронного двигателя и преобразователя частоты в двумерном контуре регулирования момента двигателя, учитываются и компенсируются электромагнитные свойства асинхронно го двигателя с преобразователем частоты и одновременно вводятся необходимые типовые свойства систем подчиненного регулирования (заданное быстродействие, стандартный характер переходных процессов и т.д.).
Сигнал m „ на первом входе формирователя управляющих напряжений 13 с помощью элемента деления 14 преобразуется в сигнал
.
ЧГ«- г-СГ
(17
На выходе элемента деления 15 формируется сигнал WSR по соотноще- нию
ы
SR IiCltlLiPlkL, (18
г$(1
X г6
где W,,(P) 1 1 + --; Р передаточная функция форсирующего звена 21.
На выходе фильтра 24 с передаточной функцией W(P) ФормИ
(-б руется сигнал «i. по соотношению
,гт;т;р- « 7 - «
Непинейный элемент 21 представляет кривую намагничивания в виде
Ц Г )
На выходе пропорционального звена 23 формируется с игнал
VsCfi Хзб .(20)
На выходе сумматора 29 формируется сигнал
irfR (21) На выходе сумматора 25 формируется сигнал
V
SfR
iVrf., + isj,RXsi
(22)
На выходах сумматоров 28 и 30 формируются сигналы управления преобразователя частоты 2 по соотношениям:
I
-K sfbR- (23) U,f ,tR - ), (24)
где К „ - коэффициент передачи преобразователя частоты по напряжению.
SS
г S + г
г
г f, - сопротивление эквивалентной
схемы преобразователя частоты.
Блок 12 преобразования координат формирует сигналы управления преобразователем 2 частоты ,, последовательно реализуя преобразование поворота координат на угол и переход от двухфазной системы координат о, л к трехфазной по соотношениям:
U.cos у - U. «inj-; T- + U.,ccos , j
и.
(25)
- I и.-ь - и,;
1
V3
(26)
- 2 So( 2
Операции, реализуемые элементами дифференцирования 19, 20, выполняются с необходимой точностью, поскольку на вход формирователя управляющих напряжений поступают сигналы m,tpj,, прошедшие фильтрацию.
Блоки 11 и 12 реализуются с помощью стандартных элементов функциональных устройств для электроприводов переменного тока УБСР-А - преобразователей фаз 3/2 , преобразователей фаз 2/3 , векторного анализатора, блока преобразования координат. Остальные элементы системы могут быть реализованы непосредственно по уравнениям, описывающим их работу, обьпными средствами техники регулирования (масштабными сумматорами, интеграторами, нелинейными функциональным преобразователями, дифференц1фующими и множительно-делительными элементами и т.д.) из типовых средств управления серии УБСР-АИ..
Работоспособность предлагаемого устройства проверена путем моделиро- вания процессов в злектроприводе на ЦВМ, При этом асинхронный двигатель моделировался по полной системе дифференциальных уравнений, а система регулирования моделировалась уравне- киями, соответствующими показанным на фиг. 1 и 2 структурам.
Расчет переходных процессов показал, что динамические свойства предлагаемого электропривода во всем диапазоне рабочих скоростей и нагрузок оказываются близкими к типовым свойствам систем подчиненного регулирования: процессы момента и скорости близки к типовым процессам
подчиненных систем автоматического регулирования; в динамике с удовлетворительной точностью поддерживаются заданные режимы.
Таким образом, введение в электропривод с асинхронным двигателем формирователя управляющих напряжений, снабженного элементами деления, умножения, дифференцирования, нелиней- НЬПУ элементом, форсирующим и пропорциональным звеньями, фильтром, сумматорами и инверторами позволило осуществить в отличие от известных решений достаточно полный учет свойств объекта регулирования (АСД с ПЧ).
За счет этого достигаются высокие динамические показатели предлагаемого электропривода с асинхронным двигателем, что делает возможным его пр и- менение для рабочих машин с высокодинамичным режимом работы, на которых традиционно используются тирис- торные электроприводы постоянного тока (главные приводы и основные меха- низмь прокатных станов, транспортных средств и т.д.).
Формула изобретения
Электропривод, содержащий асинхронный двигатель с короткозамкнутым ротором, подключенный к выходам преобразователя частоты, задатчик пото Q
0 5
0
5
0
5 0
5
косцепления, подключенньш выходом к одному из входов регулятора пото- косцепления, задатчик частоты вращения, подключенный выходом к одному из входов регулятора частоты вращения, к другому входу которого подключен выход датчика частоты вращения ротора указанного асинхронного двигателя, регулятор момента, подключенный одним входом к выходу регулятора частоты вращения, датчики тока и напряжения фаз статора, блок преобразования координат и блок формирова- ния- сигналов обратных связей с выходами сигналов момента, потокосцепления и гармонических функций, подключенными соответственно к другому входу регулятора момента, другому входу регулятора потокосцепления и к опорным входам блока преобразования координат, при этом входы блока формирования сигналов обратных связей подключены к выходам датчиков тока и напряжения фаз статора, а выходы блока преобразования координат соединены с управляющими входами преобразователя частоты, отличающийся тем, что, с целью улучшения динамических свойств путем повышения быстродействия, введен трехвходовый формирователь управляющих напряжений, выполненный с двумя элементами деления, тремя элементами умножения, двумя элементами дифференцирования, нелинейным элементом, реализующим кривую намагничивания асинхронного двигателя, форсирующим и пропорциональным звеньями, фильтром, шестью сумматорами, двумя инверторами, при этом первый вход формирователя управляющих напряжений образован входом делимого первого элемента деления, второй вход образован объединенными входами делителя первого элемента деления указанного нелинейного элемента и первыми входами первого и второго сумматоров, третий вход формирователя управляющих напряжений образован одним из входов третьего сумматора, другой вход которого объединен с одним входом первого элемента умножения и подключен к выходу второго элемента деления, а выход третьего сумматора подключен к объединенным первым входам второго и третьего элементов умножения, выход первого элемента деления подключен к первому входу четвертого сумматора, через форсирующее звено к входу делимого второго эле-
мента деления, через первый инвертор - к второму входу первого элемента умножения и через пропорциональное звено - к объединенным между бобой второму входу второго элемента умножения и входу первого элемента дифференцирования, выход которого подключен к второму входу четвертого сумматора, третий вход которого сое- динен с выходом третьего элемента умножения, выход первого элемента умножения подключен к объединенным между собой вторым входам второго и пятого сумматоров, выход второго сумматора через фильтр подключен к входу делителя второго элемента деления, выход указанного нелинейного элемента соединен с первым входом пятого сумматора, выход которого подключен к объединенным между собой второму и первому входам первого и шестого
сумматоров соответственно, выход первого сумматора подключен к объединенным между собой второму входу третьего элемента умножения и входу второго элемента дифференцирования, выход которого соединен с вторым входом шестого сумматора, третий вход которого через второй инвертор соединен с выходом второго элемента умножения, первый, второй и третий входы формирователя управляющих напряжений подключены соответственно к выходам регулятора момента, регулятора потокосцепления и датчика частоты вращения, а выходы формирователя управляющих напряжений, образованные выходами четвертого и шестого сумматоров подключены к соответствующим управляющим входам блока преобразоаания координат .
Фиг. 2
-
fj
Фи.З
| Патент ФРГ № 1941312, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ управления электроприводом переменного тока и устройство для его осуществления | 1976 |
|
SU656175A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
