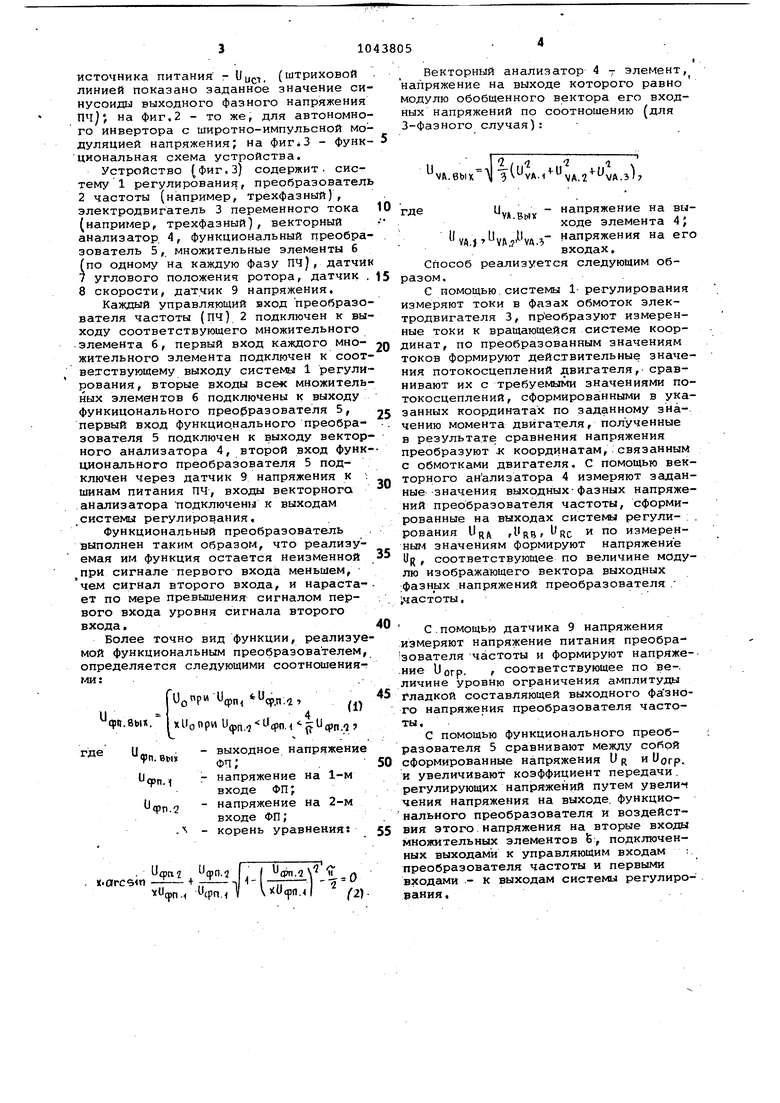
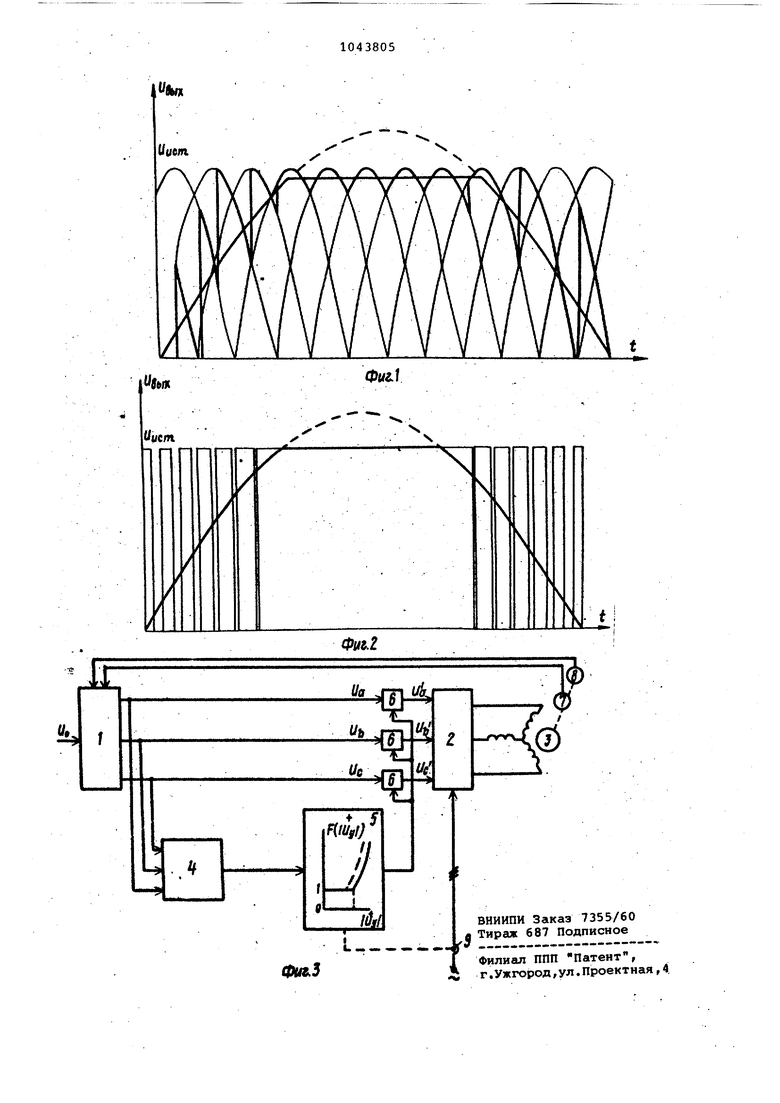
Изобретение относится к электротехнике и может быть использовано в ч астотно-регулируемых электроприводах переменного тока с высокими требова:ниями к качеству регулирования скорости . Известен способ регулирования выходного напряжения преобразователя частоты в составе электропривода с асинхронизированным синхронным двигателем (ЛСД), заключающийся в том, что измеряют токи многофазной систег ы обмоток ротора, преобразуютизмеренные величины токов к системе врашающихся координат, связанных с полем статора, по преобразованным значениям токов ротора вычисляют ЭДС скольжения в обмотках ротора, кроме того, в указанных координатах по заданному значению скорости двигателя и сигналу задания по реактивной мощности статора ЛСД вычисляют требуемые значения токов статора и сравнивают их вычисленными значениями ЭДС скольжения в обмотках ротора и с измеренными и преобразованными в указанных ко ординатах действительными значениями токов статора, а полученными в результате сравнения регулирующими сиг налами, содержащими пропорциональную и интегральную составляющие, преобра зованными к координатам, связанным с многофазной системой обмоток ротора, управляют фазными выходными напряжени ями преобразователя частоты, питающе го роторные обмотки АСД l . Наиболее близким техническим реше нием к изобретению является способ регулирования скорости вращения автоматизированного частотно-управляе-, мого электропривода, при котором измеряют токи в фазах обмоток электродвигателя электропривода, преобразую измеренные токи к системе вращающихся координат, формируют по преобразо ванным значениям токов действительны значения потокосцеплений фаз обмоток электродвигателя, сравнивают их с требуемыми значениями потокосцепле-; НИИ, сформированными в указанных координатах по заданному значению мо- мента двигателя, полученные в резуль тате сравнения напряжения преобразуют к координатам, связанным с осями фаз обмоток электродвигателя, и полу ченными сигналами воздействуют на входные напряжения преобразователя частоты 2 . Поскольку в данном электроприводе решается задача высокого качества ре гулирования скорости в динамике, напряжение питания преобразователя час тоты (ПЧ) выбирается исходя из макси мальных значений выходного напряжения ПЧ, которые могут возникнуть в процессе регулирования Такой выбор; уровня напряжения питания ПЧ предопределяет для него повышенные габарит ные показатели, а в случае непосредственного ПЧ - также и низкий коэффициент мощности. Снижение наЬряжения источника питания улучвгало. бы экономичность ПЧ, но существенно ухудшило бы качество регулирования ввиду возникающего ограничения амплитуды максимальных выходных напряжений ПЧ уровнем напряжения источника питания. Цель изобретения - повышение качества регулирования, и улучшение энергетических показателей электропривода . Поставленная цель достигается тем, что дополнительно измеряют заданные мгновенные значения выходных фазных напряжений преобразователя частоты, по измеренным значениям формируют напряжение, соответствующее по величине модулю обобщенного вектора выходных фазных напряжений преобразователя частоты, измеряют напряжение источника питaния преобразователя частоты и формируют напряжение, соответствующее по величине уровню ограничения амплитуду гладкой составляющей выходного фазного напряжения преобразователя частоты; сравнивают между собой по величине сформированные напряжения и при превышении требуемой величины модуля обобщённого вектора уровня ограничения в функции требуемой величины модуля увеличивают коэффициент передачи регулирующих напряжений,, управля ющих фазными выходными напряжениями преобразователя частоты. : в устройство для реализации способа, содержащее преобразователь частоты, выход которого подключен к электродвигателю электропривода, систему регулирования электропривода, дополнительно введены множительные элементы, число которых равно числу фаз преобразователя частоты, функциональный преобразователь управляющих напряжений, векторный анализатор выходных сигналов системы регулирования электропривода и датчик напряжения, причем каждый множительный элемент включен между соответствующим выходом системы регулирования и соответствующим входом преобразователя частоты,, второй вход каждого множительного элемента подключен к. выходу функционального преобразователя, первый вход которого связан с выходом векторного анализатора, входы которого соединены с выходами системы регулирования электропривода, а второй вход функционального преобразователя связан через датчик напряжения с источником питания преобразователя частоты,. На фиг.1 показана для преобразователя частоты с непосредственной связью форма выходного фазного напряжения и его глгшкой составляющей в . зоне ограничения уровнем напряжения источника питания - ,-,, (штриховой линией показано заданное значение си нусоиды выходного фазного напряжения ПЧ), на фиг.2 - то же, для автономно го инвертора с широтно-импульсной мо дуляцией напряжения; на - функ циональная схема устройства. Устройство (Фиг.З) содержит, систему 1 регулирования, преобразовател 2 частоты (например, трехфазный), электродвигатель 3 переменного тока (например, трехфазный, векторный анализатор. 4, функциональный преобра зователь 5, множительные элементы б (по одному на каждую Фазу ПЧ), датчи 7углового положения ротора, датчик 8скорости, датчик 9 напряжения. Каждый управляющий вход преобразо вателя частоты (ПЧ) 2 подключен к вы ходу соответствующего множительного элемента 6, первый вход каждого множительного элемента подключен к соот ветствующему выходу системы 1 регули рования , вторые входы все« множитель ных элементов б подключены к выходу функицонального преобразователя 5, первый вход функционального преобразователя 5 подключен к выходу вектор ного анализатора 4, второй вход функ ционального преобразователя 5 подключен через датчик 9 напряжения к шинам питания ПЧ, входы векторнога анализатора подключены к выходам системы регулирования. Функциональный преобразователь выполнен таким образом, что реализуемая им функция остается неизменной при сигнале первого входа меньшем, чем сигнал второго входа, и нарастает по мере превышения сигналом первого входа уровня сигнала второго входа, Более точно вид функции, реализуе мой функциональным преобразователем, определяется следующими соотношенияt-mt n:i. Фп-вых. 1 хиопри Uфn.,,Uфn.,4 чп-.1. -выходное напряжение фп; . -напряжение на 1-м входе ФП; -напряжение на 2-м входе ФП; -корень уравнения: I Цфп.У фП ифП.2 .;l х-агсвш . фп. Векторный анализатор 4 у элемент, напряжение на выходе которого равно модулю обобщенного вектора его входных напряжений по соотношению (для 3-фазного случая): j|(C уА,.з). Uvi п .« напряжение на выТА . D Ь лл ходе элемента 4; IVA 1 напряжения на его входах. Способ реализуется следующим образом.. С помощью.системы 1- регулирования измеряют токи в фазах обмоток электродвигателя 3, преобразуют измеренные токи к вращающейся системе координат, по преобразованным значениям токов формируют действительные значения потокосцеплений двигателя,-сравнивают их с требуемыми значениями потокосцеплений , сформированными в указанных координатах по заданному значению момента двигателя, полученные в результате сравнения напряжения преобразуют .к координатам, связанным с обмотками двигателя, С помощью векторного анализатора 4 измеряют згщанные -значения выходных-фазных напряжений преобразователя частоты, сформированные на выходах систе1«ы регули- : . рования Дйв, и по измеренным значениям формируют напряжение UR, соответствующее по величине модулю изображающего вектора выходных ;фазных напряжений преобразователя . частоты, С.помощью датчика 9 напряжения измеряют напряжение питания преобразователя частоты и формируют напряжение Uorp. г соответствующее по ве-. личине уровню ограничения амплитуды ладкой составляющей выходного фазного напряжения преобразователя частоты, С помощью функционального преобразователя 5 сравнивают между собой сформированные напряжения U R и Uorp. и увеличивают коэффициент передачи. регулирующих напряжений путем увелич чения напряжения на выходе, функционального преобразователя и воздействия этого.напряжения на вторые входы множительных элементов fe:, подключенных выходами к управляющим входам :. преобразователя частоты и первыми входами - к выходам системы регулирования.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом переменного тока | 1980 |
|
SU983958A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕТРОПРИВОДОМ ПЕРЕМЕННОГО ТОКА | 1996 |
|
RU2115218C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ ВРАЩЕНИЯ ТРЕХФАЗНОЙ МАШИНЫ | 2013 |
|
RU2557071C2 |
| СИСТЕМА ВЕКТОРНОГО УПРАВЛЕНИЯ СКОРОСТЬЮ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 2006 |
|
RU2317632C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЭЛЕКТРИЧЕСКОЙ МАШИНЫ ПЕРЕМЕННОГО ТОКА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2074394C1 |
| СПОСОБ ВЕКТОРНОГО УПРАВЛЕНИЯ СИНХРОННЫМ ЭЛЕКТРОДВИГАТЕЛЕМ С ПОСТОЯННЫМИ МАГНИТАМИ НА РОТОРЕ И ЭЛЕКТРОПРИВОД ДЛЯ ОСУЩЕСТВЛЕНИЯ ЭТОГО СПОСОБА | 1998 |
|
RU2141719C1 |
| Вентильный электропривод | 1984 |
|
SU1205246A1 |
| Электропривод с асинхронной короткозамкнутой машиной | 1975 |
|
SU647828A1 |
| Частотно-регулируемый электропривод | 1988 |
|
SU1605307A1 |
| Частотно-регулируемый электропривод переменного тока | 1980 |
|
SU892635A1 |
1, Способ регулирования .скорости вращения автоматизированного часг . тотно-управляемого электропривода, при котором измеряют токи в фазах oftмоток электродвигателя электропривода, преобразуют измеренные токи к . системе вращающихся координат, формируют по преобразованным значениям токов действительные значения потокосцепле- .НИИ фаз обмоток электродвигателя,сравнивают их с требуемыми значениями потокосцеплений,сформированными в указанных координатах по заданному значению момента электродвигателя,полученные в результате сравнения напряжения,преобразуют к координатам,связанным с осями фаз обмоток электродвигателя,и приученными сигналами воздействуют на входные напряжв«ия преобразователя частоты,о тл и чающий ей тем, что, с целью повышения качества регулирования и улучшения энергетических показателей электро-; привода,дополнительно измеряют задан- ные мгновенные значения .выходных фаэнЫх напряжений преобразователя частоты,по и:эмеренным значениям формируют напряжение, соответствующее по величине i . Модулю обобщенного вектора выходных ; .фазных напряжений преобразователя частоты, измеряют напряжение .источника питани преобразователя частоты и формируют напряжение, соответствующее по величине, уровню ограничения амплитуды гладкой составляющей выходного фазного напряжения преобразователя частоты, сравнивают между собой по величине сформированные напряжения и при превышении требуемой величины модуля обобщенного вектора напряжений УРОВНЯ ограничения в функ-. ции требуемой величины модуля увеличивают коэффициент передачи регулирующих напряжений, управляющих фазными выходными напряжениями преобразовате- ля частоты. 2. Устройство для реализации способа по п.1, содержащее преобразователь частоты, выход которого подключен к электродвигателю электроприво- да, систему регулирования электропри-е вода, отлич.ающее с я тем, . что в него дополнительно введены множительные элементы, число которых равно числу фаз преобразователя час4 ;тоты, функциональный преобразователь DO 00 управляющих напряжений, векторный анализатор выходных сигналов системы регулирования электропривода и датчик о напряжения, причем .каждый множительный элемент включен между соответстСП вующим выходом системы регулирования и соответствующим входом преобразователя частоты, второй вход каждого множительного элемента подключен к выходу функционального преобразователя, первый вход которого связан с выходом векторного анализатора, входы; которого соединены с выходами систе-; мы регулирования электропривода, а второй вход функционального преобраэоват ля связан через датчик напряжения с источником питания преобразоватедя частоты.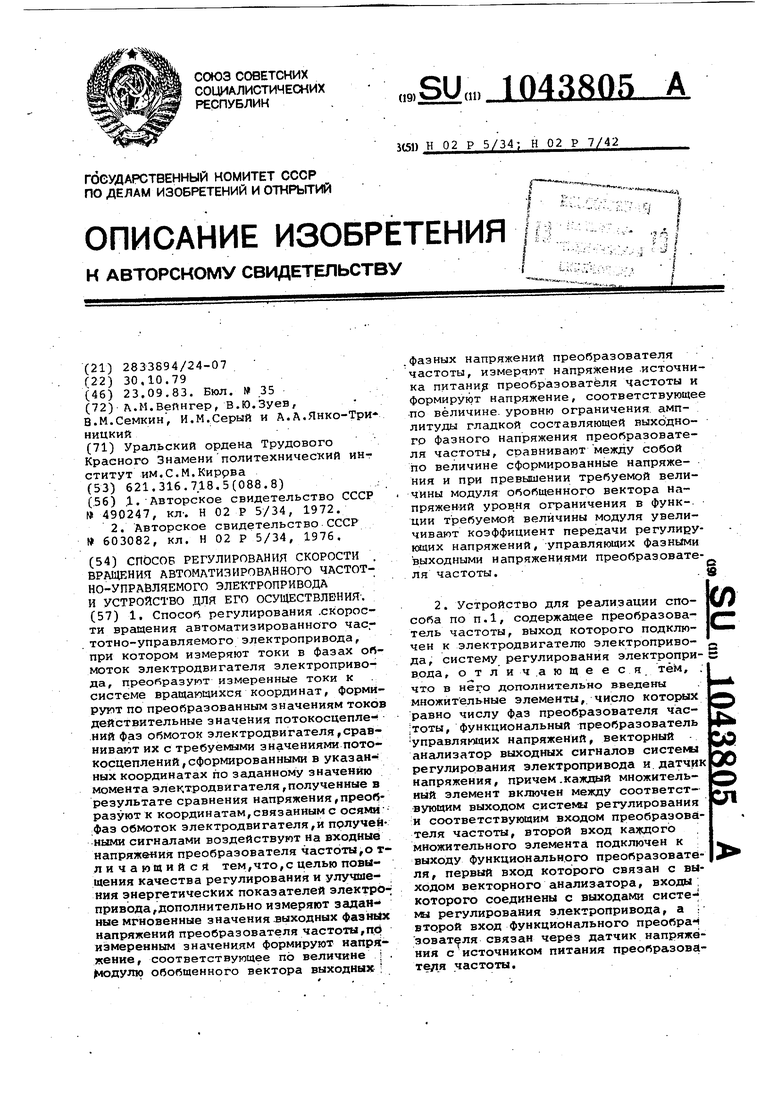
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Регулируемый электропривод с асинхронизированным синхронным двигателем | 1972 |
|
SU490247A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод с синхронным двигателем | 1976 |
|
SU603082A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
