Изобретение относится к способам виброизоляции и может быть использовано при оборудовании рабочих мест операторов (водителей) транспортно-технологических машин (ТТМ) в сельском хозяйстве, промышленности, грузовых и пассажирских перевозках.
Известен способ виброизоляции человека-оператора ТТМ [1], заключающийся в том, что смягчают упругий элемент подвески сиденья, размещаемого между источником колебаний и человеком.
Способ обеспечивает известное качество виброизоляции оператора в вертикальном направлении колебаний.
Недостатком способа является невозможность достижения инфранизкочастотной и качественной низкочастотной виброизоляции при колебаниях транспортной виброзащитной системы: источник колебаний (ТТМ) - упругие связи сиденья - объект защиты (человек).
Известен также способ виброизоляции человека-оператора ТТМ [2], заключающийся в том, что смягчают упругий элемент подвески сиденья путем управления взаимным влиянием групповых свойств податливости составляющих упомянутого упругого элемента.
Способ обеспечивает известное качество инфранизкочастотной и низкочастотной виброизоляции оператора по вертикали.
Недостаток способа - обеспечение качественной виброизоляции лишь при малых амплитудах колебаний, что недостаточно для транспортной виброзащитной системы.
Кроме того, способ не позволяет осуществить качественную горизонтальную виброизоляцию, так как система в данном направлении обладает динамической неустойчивостью.
В целом отмеченные недостатки не позволяют обеспечить оператору необходимый рабочий комфорт.
Наиболее близкий по технической сущности и достигаемому результату является способ виброизоляции человека-оператора ТТМ [3], принятый в качестве прототипа и заключающийся в том, что осуществляют смягчение упругого элемента подвески компактного сиденья, размещаемого между источником колебаний и человеком, путем перераспределения групповых упругих свойств между несколькими цилиндрическими пружинами кручения упругого элемента.
Данным способом достигается известное качество виброизоляции оператора в вертикальном и горизонтальном направлениях колебаний, а также регулирования параметров виброзащитной системы.
Недостатком способа является невозможность достижения качественной инфранизкочастотной и низкочастотной виброизоляции в вертикальном направлении вследствие относительно высокой жесткости упругого элемента подвески, имеющего на рабочем участке перемещений линейную или близкую к ней упругую характеристику, что при рациональных габаритах может обеспечить основную частоту f'0 собственных колебаний системы не ниже 1,5 - 7,0 Гц. Поэтому система будет работать в резонансных режимах или околорезонансных режимах на частотах, где, как известно, находятся основные частоты собственных колебаний тела человека и его органов.
Кроме того, связанность вертикальных и горизонтальных колебаний системы при относительно высокой жесткости упругого элемента не позволяет обеспечить инфранизкочастотную и качественную низкочастотную горизонтальную виброизоляцию.
Вместе с тем, способ связан с необходимостью увеличения рабочего пространства, а также затратами значительных усилий при регулировании параметров системы, например, по вертикали.
В целом отмеченные недостатки не позволяют обеспечить оператору необходимый рабочий комфорт.
Известно сиденье человека-оператора ТТМ [4], содержащее посадочное место с подушкой и спинкой, закрепленными на каркасе, механизм регулирования статической нагрузки и подвески, включающую основание, упругий элемент в виде цилиндрической пружины кручения, размещенной вокруг силового вала, установленного в боковых стойках основания, и направляющий параллелограммный механизм.
С помощью данного сиденья невозможно достичь инфранизкочастотной и качественной низкочастотной виброизоляции при колебаниях виброзащитной системы человека-оператора ТТМ. Кроме того, для регулирования сиденья необходимо приложить значительные усилия.
Все это снижает комфорт оператора при выполнении им работы.
Известно также компактное сиденье [3], являющееся прототипом предлагаемого сиденья и содержащее посадочное место с подушками и каркасом, механизмы регулирования вертикального положения, статической нагрузки и подвеску, включающую упругий элемент в виде двух цилиндрических пружин кручения и направляющий параллелограммный механизм, рычаги которого связаны вращательными кинематическими парами с основанием последнего и каркасом, при этом пружины упругого элемента размещены соосно друг другу и оси вращения по меньшей мере одного из рычагов.
Сиденье при рациональных габаритах обеспечивает известное качество низкочастотной вибраизоляции в вертикальном и горизонтальном направлениях.
Однако линейность или почти линейность упругих характеристик на участке рабочих перемещений, относительно высокая жесткость упругих элементов, применяемых в сиденьях данного типа, связанность колебаний вследствие особенностей структуры параллелограммного направляющего механизма снижают качество низкочастотной, не обеспечивают инфранизкочастотной виброизоляции человека в вертикальном и в горизонтальном направлениях колебаний, а также усложняет регулирование сиденья. Все это снижает рабочий комфорт оператора.
Анализ приведенного уровня техники свидетельствует о том, что задачей изобретения является создание способа виброизоляции человека-оператора ТТМ и сиденья для реализации способа, позволяющих повысить комфорт оператору. Изобретение может обеспечить повышенный комфорт за счет качественной инфра- и низкочастотной виброизоляции в вертикальном и горизонтальном направлениях, а также упрощения регулирования параметров при рациональных габаритах виброзащитной системы.
Это достигается тем, что в известном способе, согласно которому смягчают упругий элемент подвески компактного сиденья, смягчение осуществляют путем деформирования дополнительного упругого элемента в закритической области по одной из координат до второй формы изгиба и до сообщения системе колебаний, нагружения по другой координате до одной из критических точек исходной формы равновесия, далее освобождают систему и удерживают ее за критической точкой путем совместного деформирования обоих упругих элементов.
Кроме того, вертикальные положения человека-оператора могут регулировать на участке малой жесткости совместного деформирования упругого элемента подвески и дополнительного упругого элемента за критической точкой исходной формы равновесия последнего.
Эффект достигается также тем, что в известное сиденье, содержащее посадочное место, механизмы регулирования вертикального положения, статической нагрузки и подвеску с упругим элементом и рычажным направляющим механизмом, введен дополнительный упругий элемент, включающий размещенные соосно друг другу и оси вращения одного или нескольких рычагов корпус, установленный на основании, втулку, соединенную с осью с возможностью регулирования углового положения относительно последней, и плоские тонкостенные конструкции, центральные сечения которых закреплены во втулке, а концы - в корпусе с возможностью упругого изгиба по второй форме при деформировании в закритической области по одной из координат.
Упомянутые плоские тонкостенные конструкции могут быть выполнены в виде равнопрочных тонких пластин, собранных в пакеты.
Кроме того, механизм регулирования вертикального положения выполнен в виде полого корпуса, жестко закрепленного на основании, штока и упругого упора, при этом направляющая часть штока размещена в полом корпусе, а свободная часть имеет геометрическую форму, обеспечивающую возможность контакта с одним или несколькими рычагами направляющего механизма, причем шток и упор имеют возможность перемещения и фиксирования положения относительно основания при настройке сиденья.
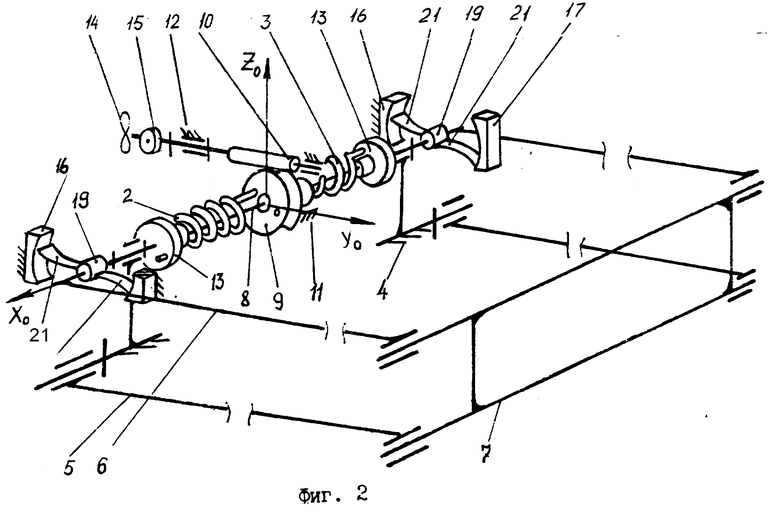
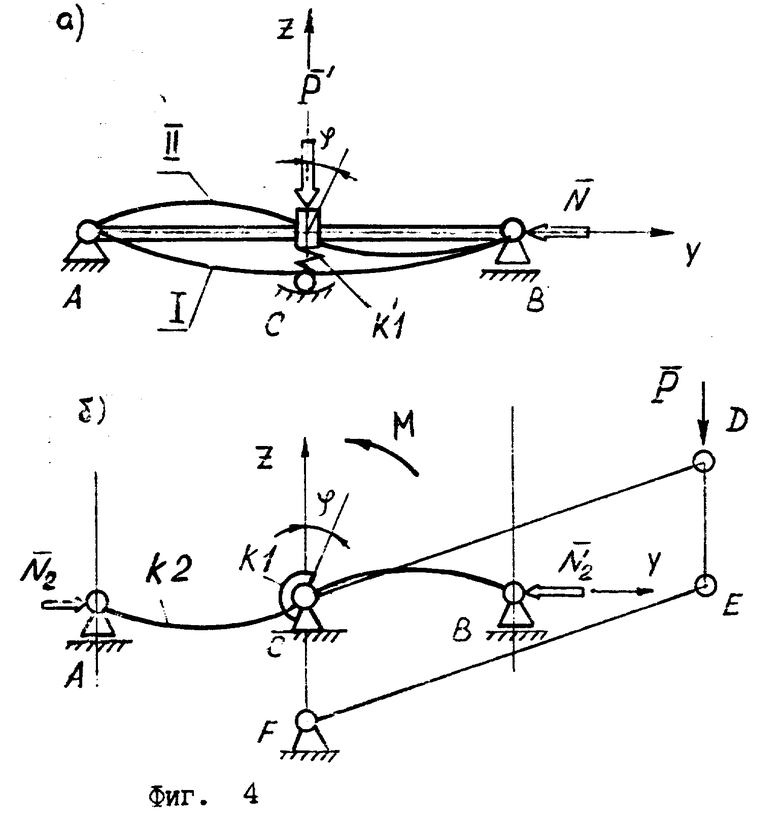
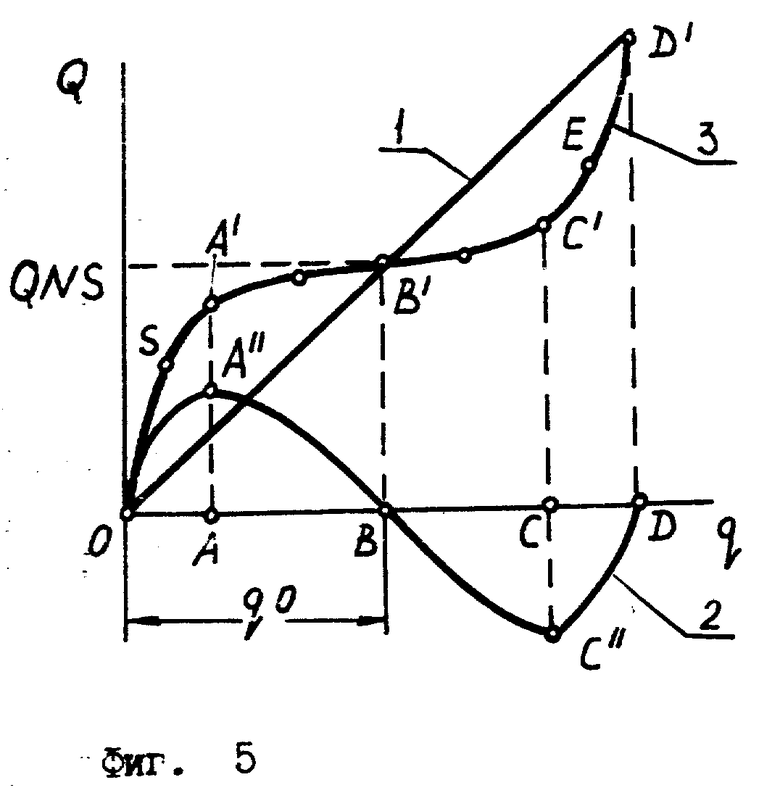
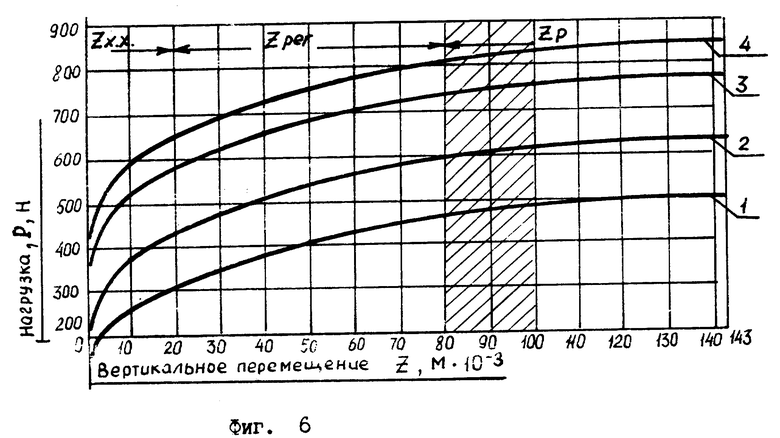
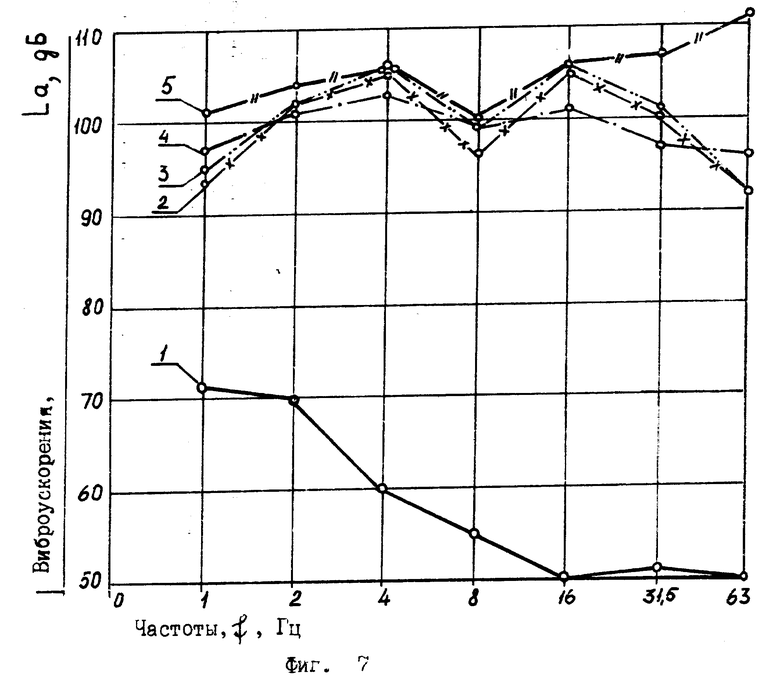
На фиг. 1 приведена структурная схема сиденья для реализации предлагаемого способа; на фиг. 2 - схема подвески; на фиг. 3 - дополнительный упругий элемент с тонкостенными конструкциями в виде, например, пакетов равнопрочных тонких пластин; на фиг. 4 - схема синтеза второй формы упругого изгиба тонких пластин при деформировании сжатием в закритической области по линейной координате; на фиг. 5 - схема нагружения, например, по угловой координате, пакетов тонких пластин до критической точки их исходной формы равновесия и схема синтеза интегральной характеристики упругих связей виброзащитной системы за критической точкой путем совместного деформирования пакетов тонких пластин дополнительного упругого элемента и пружин упругого элемента подвески (где q - обобщенная координата, например, ϕ; Q - обобщенная сила, например, момент M; QNS - номинальная статическая нагрузка); на фиг. 6 - регулировочный и рабочий участки интегральной характеристики; на фиг. 7 - динамическая характеристика сиденья в сравнении с аналогами.
Сиденье содержит (фиг. 1 - 3) посадочное место 1, включающее связанные между собой жестким каркасом спинку и подушку, механизмы регулирования вертикального положения, статической нагрузки и подвеску. Подвеска содержит упругий элемент в виде двух цилиндрических пружин кручения с правой 2 и левой 3 навивкой, параллелограммный направляющий механизм, включающий основание 4 и две пары рычагов 5 и 6, свободные концы которых шарнирно связаны через подвижную площадку 7 с каркасом посадочного места 1, другие концы одной пары рычагов, например 5, также шарнирно - с основанием 4, а второй пары 6 - жестко с силовым валом 8, свободно пропущенным через центральную полость червячного колеса 9 механизма регулирования статической нагрузки и установленным в подшипниковых опорах на основании 4, причем колесо 9 и червяк 10 данного механизма подвижно установлены в собственных опорах 11 и 12 соответственно, жестко связанных с основанием 4, при этом пружины 2 и 3 размещены соосно валу 8 так, что одни концы пружин установлены в пазах одной из двух втулок 13, жестко закрепленных на валу 8, а другие концы - в торцевых пазах колеса 9, причем возможность регулирования и контроля статической нагрузки обеспечивается с помощью маховичка 14, жестко закрепленного на хвостовике червяка 10, и тарировочной шкалы 15 соответственно.
Введенный дополнительный упругий элемент включает размещенные соосно друг другу и валу 8 корпус, выполненный, например, в виде двух пар секторов 16 и 17 с пазами 18 на внутренних дугообразных поверхностях, две втулки 19, на внешних поверхностях которых выполнены ответные пазы 20, и пакеты тонких упругих пластин 21, например, составных по длине, при этом одни их торцевые кромки размещены диаметрально (относительно геометрической оси x0 вала 8) противоположные друг другу пазах 18 соответствующих секторов 16 и 17, а другие - в пазах 20 соответствующей втулки 19, причем пазы 20 втулок 19 развернуты относительно пазов 18 соответствующих секторов 16 и 17 так, что упругая линия каждой левой относительно вертикальной оси z0 части составного пакета пластин 21 представляет собой продолжение упругой линии соответствующей правой части пакета пластин 21. При этом пары секторов 16 и 17 установлены на торцевых стенках основания 4 с возможностью переустановки в процессе сборки, настройки и последующего жесткого крепления, а втулки 19 размещены в одной плоскости с соответствующей парой секторов 16 и 17 и установлены на валу 8 с возможностью регулирования углового положения относительно последнего так, что пакеты пластин 21 имеют возможность упругого изгиба до второй формы при деформировании в закритической области путем сжатия по линейной координате y. Причем механизм регулирования вертикального положения включает полый корпус 22, жестко закрепленный на основании 4, шток 23 и упругий упор 24, причем направляющая часть штока 23 размещена в корпусе 22, а свободная часть имеет геометрическую форму, обеспечивающую возможность контакта с рычагами 6 направляющего механизма. Кроме того, шток 23 и упор 24 имеют возможность перемещения относительно основания 4 в процессе настройки с последующей жесткой фиксацией положения.
Так как пакеты пластин 21 дополнительного упругого элемента должны работать в закритическом деформированном состоянии при больших перемещениях, то их выполняют гибкими и, одновременно равнопрочными. В процессе оптимизации параметров прочности и диапазона регулирования жесткости пластины 21 выполняют в виде трапеций, размеры которых и их количество в пакете определяют расчетным путем в зависимости от необходимой несущей способности пружин 2 и 3, а также рациональных габаритов системы в целом.
Способ осуществляют с помощью сиденья следующим образом.
Собранное сиденье (фиг. 1) жестко крепят в кабине ТТМ. Шток 23 механизма регулирования вертикального положения устанавливают в верхнем крайнем положении. Упор 24 фиксируют в нижней точке возможного вертикального хода z рычагов 5 и 6, допустимого компоновкой рабочего места оператора в кабине конкретного типа ТТМ. Натяжение пружин 2 и 3 соответствует минимальной статической нагрузке P = Pmin (контроль - по индикатору 15). При этом рычаги 5 и 6 располагаются под некоторым углом ϕ = ϕнач к горизонтальной плоскости, соответствующим некоторому произвольному вертикальному положению посадочного места 1.
Далее упруго деформируют пластины 21 в закритической области путем сжатия в направлении линейной координаты y по достижении второй формы изгиба. Принцип и последовательность синтеза исходной формы показаны на фиг. 4. Трехопорную тонкую прямоугольную пластину длины lпл (см. фиг. 4,a) нагружают продольной сжимающей силой N(t) = var. Промежуточная опора C расположена, например, симметрично относительно крайних опор A, B и имеет жесткость  . При N = Nкр1 пластина теряет устойчивость по форме I(j=1). Ее центр смещается по линейной координате z. Суммарная жесткость упругой системы составляет:
. При N = Nкр1 пластина теряет устойчивость по форме I(j=1). Ее центр смещается по линейной координате z. Суммарная жесткость упругой системы составляет:  . Потеря устойчивости пластины по форме II (j = 2) возможна при N = Nкр2. Значения Nкр1 и Nкр2 определяют из условия равенства нулю вариаций изменения полной потенциальной энергии пластины при продольно-поперечном изгибе
. Потеря устойчивости пластины по форме II (j = 2) возможна при N = Nкр2. Значения Nкр1 и Nкр2 определяют из условия равенства нулю вариаций изменения полной потенциальной энергии пластины при продольно-поперечном изгибе
δ(ΔП) = 0
где
здесь lэ - эффективная длина пластины;
EJ(y) - изгибная жесткость пластины;
w(y), w'(y), EJw''(y) - ее прогиб, угол поворота и изгибающий момент соответственно;
w(y)k'1 - осадка упругой промежуточной опоры C.
Задавая функцию прогибов пластины в виде wj(y) = sin πjy/lэ), j = 1; 2, а также вводя безразмерную жесткость дополнительной опоры:  , получают
, получают  . Условие перехода изгиба пластины от формы I к II Nкр1 = Nкр2. Переход возможен, если
. Условие перехода изгиба пластины от формы I к II Nкр1 = Nкр2. Переход возможен, если  . При этом опора C жесткости
. При этом опора C жесткости  не деформируется, и центральная часть пластины не совершает перемещений по z, а поворачивается на угол ϕ . Так как в данном случае
не деформируется, и центральная часть пластины не совершает перемещений по z, а поворачивается на угол ϕ . Так как в данном случае 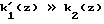 , то крутильную жесткость пластины можно определить как k2(ϕ) = sgn(dM2/dϕ2), где M2(ϕ) и ϕ2 - внешний крутящий момент и угловое перемещение соответственно. Причем k2 > 0 - на участках деформирования OA'', C''D, а k2 < 0 - на участке A''C'', где точки A'', C'' - критические точки исходной (изгибной) формы равновесия пластины (график 2 на фиг. 5).
, то крутильную жесткость пластины можно определить как k2(ϕ) = sgn(dM2/dϕ2), где M2(ϕ) и ϕ2 - внешний крутящий момент и угловое перемещение соответственно. Причем k2 > 0 - на участках деформирования OA'', C''D, а k2 < 0 - на участке A''C'', где точки A'', C'' - критические точки исходной (изгибной) формы равновесия пластины (график 2 на фиг. 5).
Для того чтобы цельные или составные пакеты пластины 21 в процессе реализации способа приобрели вторую форму изгиба, секторы 16 и 17 (фиг. 1 и 3) одновременно перемещают по направляющим пазам (не показаны), выполненным в основании 4, навстречу друг другу в направлении линейной координаты y, прикладывая необходимые усилия N > Nкр2 до сближения секторов 16 и 17 на расстояние l0 < 2lпл + lц, тем самым деформируя пакеты пластин 21 в закритической области по указанной координате. Значения N и l0 определяют предварительно расчетным путем до получения необходимой жесткости k2 дополнительного упругого элемента, соответствующей жесткости k1 упругого элемента подвески (фиг. 5).
Затем до сообщения виброзащитной системе колебаний нагружают пакеты пластин 21 в направлении угловой координаты ϕ (фиг. 1) по достижении критической точки A'' (график 2 на фиг. 5). Для этого плавно вращая маховичок 14 против хода часовой стрелки (от конца оси y0 на фиг. 2), прикладывают усилие Pкр, определяемое расчетным путем, которое в механизме регулирования статической нагрузки трансформируется в крутящий момент M2. Удерживают пакеты пластин 21 в новом деформированном состоянии путем присоединения к упругому элементу подвески (пружинам 2 и 3 суммарной жесткости k1), для чего шток 23 вводят в контакт с верхними рычагами 6 и жестко фиксируют его в корпусе 22. При этом колесо 9 и вал 8 повернутся относительно основания 4 синхронно, но без нагружения пружин 2 и 3, поэтому индикатор 15 показывает исходное значение силы P = Pmin, причем рычаги 5 и 6 развернутся по ходу часовой стрелки (от конца оси x0 на фиг. 1) на угол ϕ = ϕx.x, а подвижная часть сиденья переместится на некоторую величину холостого хода zx.x. (см. фиг. 6). Жесткость k1(ϕ) = dM1/dϕ1> 0 упругого элемента подвески определяют в пределах, необходимых для удержания деформированного состояния пакетов пластины 21 дополнительного упругого элемента между критическими точками A'' и C'' (фиг. 5) равновесия (там, где k2(ϕ) < 0). Поэтому при совместном деформировании пружин 2, 3 и пакетов пластин 21 за критической точкой A" можно синтезировать интегральную упругую характеристику упругих связей виброзащитной системы с малой, близкой к нулевым значениям жесткостью  . Трансформируя вращательное движение по ϕ, например, с помощью параллелограммного направляющего механизма, в поступательное, можно получить новую систему с упругими связями малой жесткости одновременно по двум поступательным в направлении осей z и y и одному вращательному вокруг оси x0 движениям: ks(ϕ) = dM/dϕ → 0, ks(z) = dP/dz ---> 0, ks(y) = dP/dy ---> 0, где M = Pl - внешний крутящий момент; l - длина рычага направляющего механизма.
. Трансформируя вращательное движение по ϕ, например, с помощью параллелограммного направляющего механизма, в поступательное, можно получить новую систему с упругими связями малой жесткости одновременно по двум поступательным в направлении осей z и y и одному вращательному вокруг оси x0 движениям: ks(ϕ) = dM/dϕ → 0, ks(z) = dP/dz ---> 0, ks(y) = dP/dy ---> 0, где M = Pl - внешний крутящий момент; l - длина рычага направляющего механизма.
Далее освобождают систему и удерживают ее на участке A'C' (график 3 на фиг. 5) малой жесткости путем совместного деформирования обоих упругих элементов, регулируя номинальную нагрузку PNS.
Регулирование вертикальных положений сиденья осуществляют на участке малой жесткости совместного деформирования упругого элемента подвески и дополнительного упругого элемента за критической точкой исходной формы равновесия последнего. Для этого до посадки человека на сиденье (значение силы P = Pmin) освобождают от фиксированного положения шток 23, вращают маховичок 14, при этом посадочное место 1 переместится (вверх или вниз) на заданную высоту. Далее жестко фиксируют шток 19 в новом положении. В ходе текущей настройки человек, не вставая с сиденья, освобождает шток 23 из фиксированного положения, нажимает, например, рукой (вверх или вниз - в зависимости от направления регулирования) на площадку 7 и фиксирует шток 23 в новом положении. Для регулирования не требуется приложения значительных усилий, так как упругие связи имеют (фиг. 6) на участке регулирования zрег малую жесткость, сохраняя при этом необходимую несущую способность. Вследствие малой жесткости упругих связей системы ее собственные частоты не зависят от абсолютных значений свободного хода подвижной части. Поэтому в качестве участка регулирования zрег стало возможным использовать часть интегральной упругой характеристики (фиг. 6). При рациональных габаритах (длина рычагов направляющего механизма, например, l = 300 мм) и дополнительного упругого элемента (25 • 160 • 110 мм), диапазон регулирования вертикальных положений составляет до 80 мм, что достаточно, учитывая антропометрические параметры человека.
Регулирование статической нагрузки PNS, соответствующей массе конкретного человека, выполняют путем предварительного скручивания пружин 2 и 3, вращая маховичок 14 по ходу часовой стрелки (фиг. 2) и контролируя значения нагрузки по индикатору 15: PNS = Pmin + Δ P, где Δ P - приращение нагрузки, определяемое при тарировании пружин 2 и 3. При этом получают семейство (1, 2 и т. д. на фиг. 6) упругих характеристик, определяющих несущую способность системы в заданных пределах. Причем для получения любой из характеристик дополнительный упругий элемент не перенастраивают.
В процессе осуществления предлагаемого способа с помощью сиденья обеспечивается качественная инфранизкочастотная и низкочастотная вертикальная и горизонтальная виброизоляция человека-оператора ТТМ за счет малой, близкой к нулю, жесткости упругих связей виброзащитной системы одновременно по линейным z, y и угловой ϕ координатам. При этом динамический ход составляет zp, необходимый для нормальной работы транспортной виброзащитной системы.
Расчеты, стендовые и натурные испытания в реальных условиях эксплуатации конкретных типов ТТМ показывают, что сиденье для реализации предлагаемого способа позволяет достичь (при любой массе человека) собственных частот колебаний выброзащитной системы ТТМ-сиденье-человек f0 ≤ 0,5 ± 0,02 Гц, причем как в вертикальном, так и в горизонтальном направлениях колебаний. При этом в зависимости от жесткости и количества пар пакетов пластин 21 возможно регулирование значений f0 в пределах 0,35 - 0,85 Гц, что в свою очередь дает возможность осуществлять качественную защиту по критерию "виброизоляция" KR ≤ 0,12 - 0,0017 во всем диапазоне наиболее вредных для человека инфранизких и низких частот (1 - 80 Гц). На фиг. 7 представлены результаты испытаний образца предлагаемого сиденья (график 1) и серийных аналогов, применяемых в кабинах операторов, например, зерноуборочных комбайнов: 2 - сиденье 1SRI (Франция-ФРГ); 3 - сиденье Western combine (Канада); 4 - модифицированное типа А71 и 5 - унифицированное типа А31 автотракторные сиденья (оба - Россия). Данные представлены Целинной машино-испытательной станцией Министерства сельского хозяйства и продовольствия Республики Казахстан по результатам сравнительных государственных испытаний комбайнов отечественного и зарубежного производства. Из графиков видно, что качество виброизоляции предлагаемого сиденья превосходит качество аналогов на 25 - 50 дБ и более, что в абсолютных значениях составляет 10 - 300 и более раз.
Кроме того, образцы предлагаемого сиденья испытаны в составе короткобазовых автомобильных кранов, грузопассажирских вертолетов и других ТТМ. Во всех случаях образцы также заметно превосходили штатные виброзащитные сиденья по качеству виброизоляции.
Вследствие малой жесткости упругих связей виброзащитной системы ее собственные частоты не зависят от абсолютных значений свободного хода подвижной части. Поэтому вертикальные положения сиденья можно регулировать более простыми средствами и меньшими со стороны человека-оператора усилиями при рациональных габаритах.
Таким образом, предлагаемые способ виброизоляции и сиденья для его реализации в сравнении с прототипом позволяют повысить комфорт оператора.
Источники информации
1. Вибрации в технике: Справочник. - Т. 6. Защита от вибрации и ударов. /Под. ред. К.В.Фролова - М.: Машиностроение, 1981, с. 412 - 418.
2. Ивович В.А., Онищенко В.Я. Защита от вибрации в машиностроении - М.: Машиностроение, 1990, с. 144 - 146, 206 - 210.
3. Патент 4047759 США, кл. A 47 C 3/22, 3/30, 1977.
4. Авт. св. N 925695 СССР, кл. B 60 N 1/00, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОИЗОЛИРУЮЩЕГО УСТРОЙСТВА КОМПАКТНОГО СИДЕНЬЯ ДЛЯ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И ВИБРОИЗОЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2001 |
|
RU2214335C2 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ПОДВЕСКИ КОМПАКТНОГО СИДЕНЬЯ | 2001 |
|
RU2216461C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2440523C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475658C2 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНОГО СРЕДСТВА И САМОХОДНОЙ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И КОМПАКТНАЯ ПОДВЕСКА СИДЕНЬЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2010 |
|
RU2438888C1 |
| Способ динамического гашения колебаний объекта защиты и устройство для его осуществления | 2017 |
|
RU2654890C1 |
| Способ и устройство формирования заданной формы квазинулевой статической характеристики виброзащитного механизма сиденья оператора | 2022 |
|
RU2779919C1 |
| ПОДВЕСКА СИДЕНЬЯ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2028218C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ И ВИБРОИЗОЛИРУЮЩИЙ МЕХАНИЗМ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2019 |
|
RU2753061C2 |
| Способ управления структурой вибрационного поля вибрационной технологической машины на основе использования эффектов динамического гашения и устройство для его осуществления | 2016 |
|
RU2624757C1 |
Изобретение относится к способам виброизоляции и может быть использовано при оборудовании рабочих мест операторов (водителей) транспортно-технологических машин различного назначения. Способ заключается в смягчении упругого элемента подвески компактного сиденья путем деформирования дополнительного упругого элемента в закритической области по одной из координат до второй формы изгиба и, до сообщения системе колебаний, нагружения по другой координате по одной из критических точек равновесия, далее освобождают систему и удерживают ее за критической точкой путем совместного деформирования обоих упругих элементов. Изобретение позволяет повысить комфорт оператора путем качественной инфра- и низкочастотной виброизоляции, а также упрощения регулирования при рациональных габаритах системы. 2 с. и 3 з.п. ф-лы, 7 ил.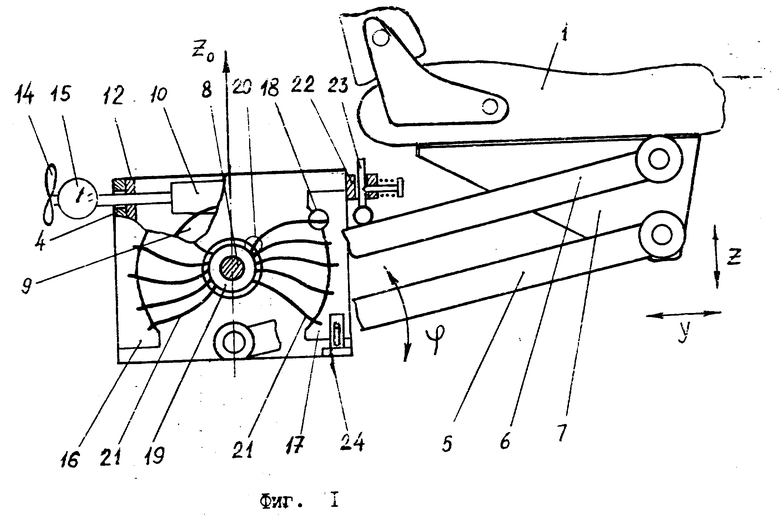
| SU, авторское свидетельство, 925695, B 60 N 1/00, 1982. |
