Изобретение относится к способам виброизоляции и может быть применено для защиты человека, машин и оборудования от широкополосных, особенно инфрачастотных, вибраций и низкочастотного вибрационного шума. Это, например, пилоты и пассажиры, конструкция и оборудование вертолетов, непилотируемые летательные аппараты (например, наносателлиты, дроны), подвижной состав и объекты инфраструктуры высокоскоростного рельсового транспорта, ускорители заряженных частиц, другие современные, а также перспективные, технические системы и системы «человек-машина».
Известен способ (Патент РФ 2504487, МПК B60N 2/52, опубл. 20.01.2014) виброизоляции пилотов вертолетов, заключающийся во введении упругого элемента в виброизолирующую систему сиденья пилота, а также устройства формирования и активации сигнала управления параметрами жесткости упругого элемента и демпфирования.
Недостатком способа является невозможность виброизоляции на инфрачастотах 0,5-10 Гц, критических (наиболее вредных и опасных) для жизнедеятельности человека (экипажа и пассажиров), а также целостности конструкции и надежной работы машин и оборудования вертолета, без многократного увеличения (такая возможность исключается вследствие особенностей конструкции вертолета) размеров рабочего пространства для виброизолирующей системы.
Известен также способ, осуществляемый с помощью виброзащитной платформы по патенту РФ 2093730, МПК F16F 13/00, опубл. 20.10.1997, снабженной основным и дополнительным упругими элементами, который является наиболее близким аналогом заявляемого способа, и заключающийся в повышении эффективности виброизоляции путем введения дополнительных буферных устройств для предотвращения резкого увеличения суммарной жесткости обоих упругих элементов при изменении статической нагрузки на виброизолирующую систему и дополнительного демпфирования.
Основным недостатком способа является недостаточно эффективная виброизоляция, особенно, в диапазоне инфрачастот, в частности, 0,5-5 Гц, наиболее вредных и опасных для систем «человек-машина» и ряда технических систем. Причина недостатка: невозможность закритического деформирования «в большом» дополнительного упругого элемента и, соответственно, крайне малый участок рабочего хода платформы, где эффективность наибольшая. Чтобы незначительно увеличить размер такого участка, потребуется кратное увеличение размеров рабочего пространства виброизолирующей системы, что невозможно вследствие особенностей антропометрии человека или технологических ограничений на относительные перемещения элементов технических систем. Кроме того, введение внешних демпферов (буферных устройств) ухудшает качество виброизоляции на инфрачастотах, т.е. именно там, где необходимо ее улучшение.
Известны виброизолирующие механизмы (Vibration isolation platforms, tables and systems, USA, 2019. - доступно на сайте www.minusk.com). В данных механизмах виброизоляция по вертикали достигается с помощью основного упругого элемента «положительной» жесткости, обеспечивающего несущую способность системы и работающего в параллель с дополнительным упругим элементом «отрицательной» жесткости путем его закритического деформирования «в малом». Поэтому суммарная жесткость обоих упругих элементов в вертикальном направлении движения может быть достаточно малой. Также механизмы снабжены упругими балками для виброизоляции в горизонтальном направлении, последовательно соединенные с упругими элементами вертикального направления. В результате создается возможность получения виброизолирующей системы, имеющей достаточно малые частоты собственных колебаний в вертикальном и горизонтальном направлениях.
Недостатком данных механизмов является крайне малый рабочий ход при значительных размерах рабочего пространства виброизолирующей системы, что существенно ограничивает область применения механизмов.
Наиболее близкой к предлагаемому виброизолирующему механизму является виброзащитная платформа (патент РФ 2093730, МПК F16F 13/00, опубл. 20.10.1997), включающая направляющее устройство, основной упругий элемент, а также дополнительный упругий элемент, выполненный в виде цельного модуля из балок, соединенных по концам и параллельно установленных в опорном устройстве с возможностью продольного натяга, при этом рабочая ось балок совпадает с направлением движения, в котором суммарная жесткость обоих упругих элементов имеет наименьшие значения.
Недостатком данной платформы является невозможность обеспечения эффективной виброизоляции в диапазоне инфрачастот, в частности, 0,5-5 Гц. Кроме того, платформа имеет малый рабочий ход при значительных размерах рабочего пространства виброизолирующей системы, что существенно ограничивает область применения платформы.
Задача изобретения (технический результат) заключается в разработке способа виброизоляции и виброизолирующего механизма, свободных от вышеперечисленных недостатков, при существенном расширении области применения способов и механизмов для виброизоляции современных и перспективных систем «человек-машина» и технических систем.
Поставленная задача, согласно заявляемому способу, решается путем регулирования и минимизации суммарной жесткости основного упругого элемента «положительной» жесткости и дополнительного упругого элемента знакопеременной жесткости виброизолирующего механизма за счет деформирования дополнительного упругого элемента в закритической области «в большом» и последующего нагружения в направлении движения виброизолирующей системы таким образом, что значения безразмерных силы нагружения и упругой деформации дополнительного упругого элемента при статическом нагружении системы соотносятся как
где  - безразмерная сила нагружения дополнительного упругого элемента;
- безразмерная сила нагружения дополнительного упругого элемента;  - безразмерная упругая деформация (прогиб в направлении движения системы) данного упругого элемента;
- безразмерная упругая деформация (прогиб в направлении движения системы) данного упругого элемента;  - переменный параметр перехода от закритического деформирования «в малом» (малые в сравнении с размерами элемента) к закритическому деформированию «в большом» (сопоставимые с размерами элемента), здесь
- переменный параметр перехода от закритического деформирования «в малом» (малые в сравнении с размерами элемента) к закритическому деформированию «в большом» (сопоставимые с размерами элемента), здесь  - эффективный размер до деформирования,
- эффективный размер до деформирования,  - сила закритического деформирования до необходимой величины, согласно заданному перемещению
- сила закритического деформирования до необходимой величины, согласно заданному перемещению  в направлении х (см. нижеследующие схемы на фиг. 4 и фиг. 5),
в направлении х (см. нижеследующие схемы на фиг. 4 и фиг. 5),  - изгибная жесткость дополнительного упругого элемента в направлении движения системы; далее регулируют протяженность рабочего хода механизма, удерживая величину суммарной жесткости упругих элементов в заданном диапазоне минимумов, без увеличения размеров рабочего пространства системы, и обеспечивая однозначность упругой характеристики дополнительного упругого элемента при нагружении в направлениях прямого и обратного хода.
- изгибная жесткость дополнительного упругого элемента в направлении движения системы; далее регулируют протяженность рабочего хода механизма, удерживая величину суммарной жесткости упругих элементов в заданном диапазоне минимумов, без увеличения размеров рабочего пространства системы, и обеспечивая однозначность упругой характеристики дополнительного упругого элемента при нагружении в направлениях прямого и обратного хода.
Возможность закритического деформирования «в большом» позволяет, при сохранении работоспособности дополнительного упругого элемента, существенно увеличить протяженность рабочего хода виброизолирующего механизма, причем без увеличения размеров рабочего пространства виброизолирующей системы, и расширить частотный диапазон эффективной виброизоляции, включая частоты, близкие к нулевым значениям.
Поставленная задача также решается с помощью виброизолирующего механизма, включающего направляющее устройство, содержащее подвижно взаимосвязанные входной, выходной и промежуточный жесткие элементы, основной упругий элемент «положительной» жесткости и дополнительный упругий элемент знакопеременной жесткости, установленный в опорном устройстве с возможностью деформирования, при этом механизм дополнительно снабжен устройством регулирования жесткости при закритическом деформировании «в большом» и величины рабочего хода дополнительного упругого элемента, а дополнительный упругий элемент выполнен в виде пакета взаимосвязанных тонкостенных элементов из композитного материала, обеспечивающего возможность закритического деформирования «в большом» дополнительного упругого элемента при сохранении работоспособности.
Дополнительный упругий элемент, выполненный из композитного материала, обеспечивает возможность получения существенно большей величины закритического деформирования «в большом», причем без увеличения эффективного размера данного элемента, при сохранении его работоспособности, что позволяет существенно увеличить рабочий ход механизма и обеспечить эффективность виброизолирующей системы в расширенном диапазоне частот, включая близкие к нулевым значения, причем без изменения размеров рабочего пространства системы.
Дополнительный упругий элемент может быть выполнен (в зависимости от статической нагрузки системы) в виде одного или нескольких пакетов взаимосвязанных тонкостенных элементов из углеродного волокна.
Дополнительный упругий элемент может быть выполнен (в зависимости от статической нагрузки системы) также в виде одного или нескольких пакетов взаимосвязанных тонкостенных элементов из арамидов.
Дополнительный упругий элемент может быть выполнен (в зависимости от статической нагрузки системы) также в виде одного или нескольких пакетов взаимосвязанных тонкостенных элементов на основе графенов.
Использование углеволокна повышает технологичность проектирования тонкостенных элементов и компактного дополнительного упругого элемента в целом, обеспечивает возможность закритического деформирования «в большом» в широком диапазоне, при сохранении работоспособности. При определенных проектных условиях, аналогичные свойства дополнительного упругого элемента может обеспечить применение, например, арамидов и пластинчатых конструкций на основе графенов.
Опорный элемент может быть снабжен вкладышами, обеспечивающими минимизацию сил трения контактных поверхностей подвижных соединений с дополнительным упругим элементом. Минимизация сил трения контактных поверхностей подвижных соединений опорного и дополнительного упругого элементов позволяет расширить диапазон эффективной виброизоляции, включая частоты, близкие к нулевым значениям.
Устройство регулирования жесткости и величины рабочего хода дополнительного упругого элемента может быть выполнено в виде передачи винт-гайка, гайка которой подвижно соединена с данным упругим элементом, а винт, также подвижно, с опорным элементом. Также устройство может быть выполнено в виде, например, подвижного штифтового соединения.
Для снижения уровня низкочастотного (125-1600 Гц) вибрационного шума, который может частично снижать эффективность системы при относительных перемещениях, сопоставимых с величиной технологических зазоров в подвижных соединениях жестких элементов направляющего устройства механизма, контактные поверхности подвижных соединений данных жестких элементов могут быть выполнены из композитов на основе сверхвысокомолекулярного полиэтилена с возможностью изменения его трибологических характеристик с помощью полидисперсных наполнителей.
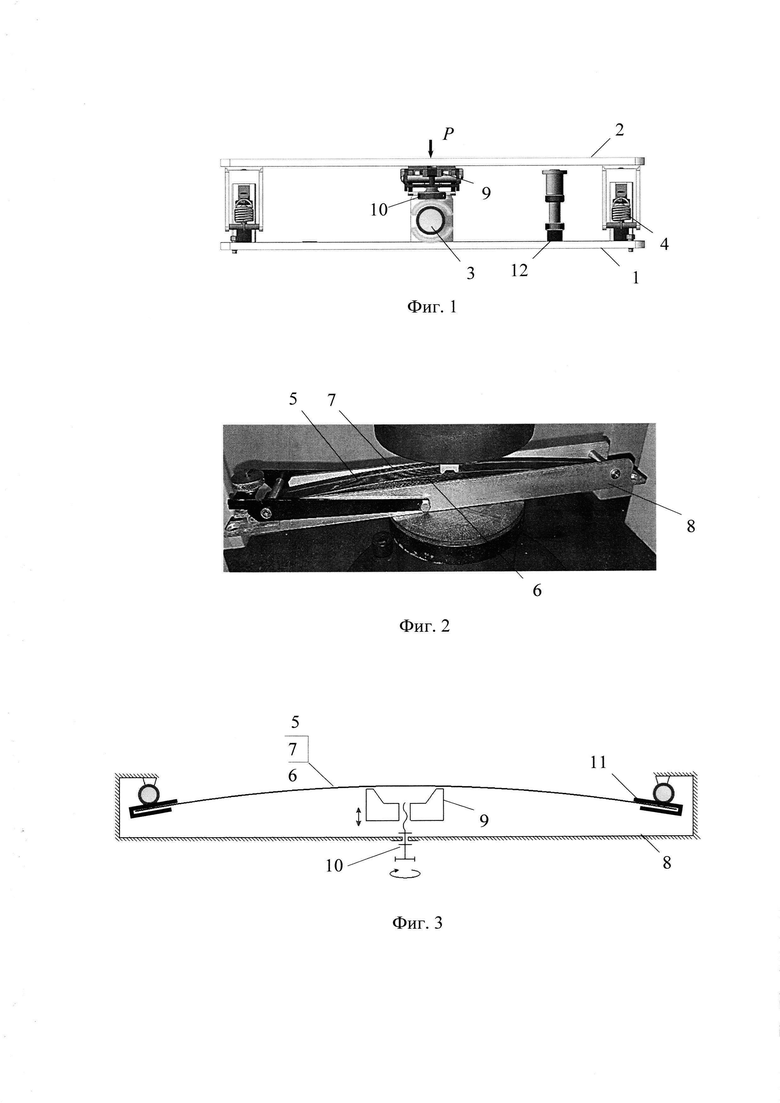
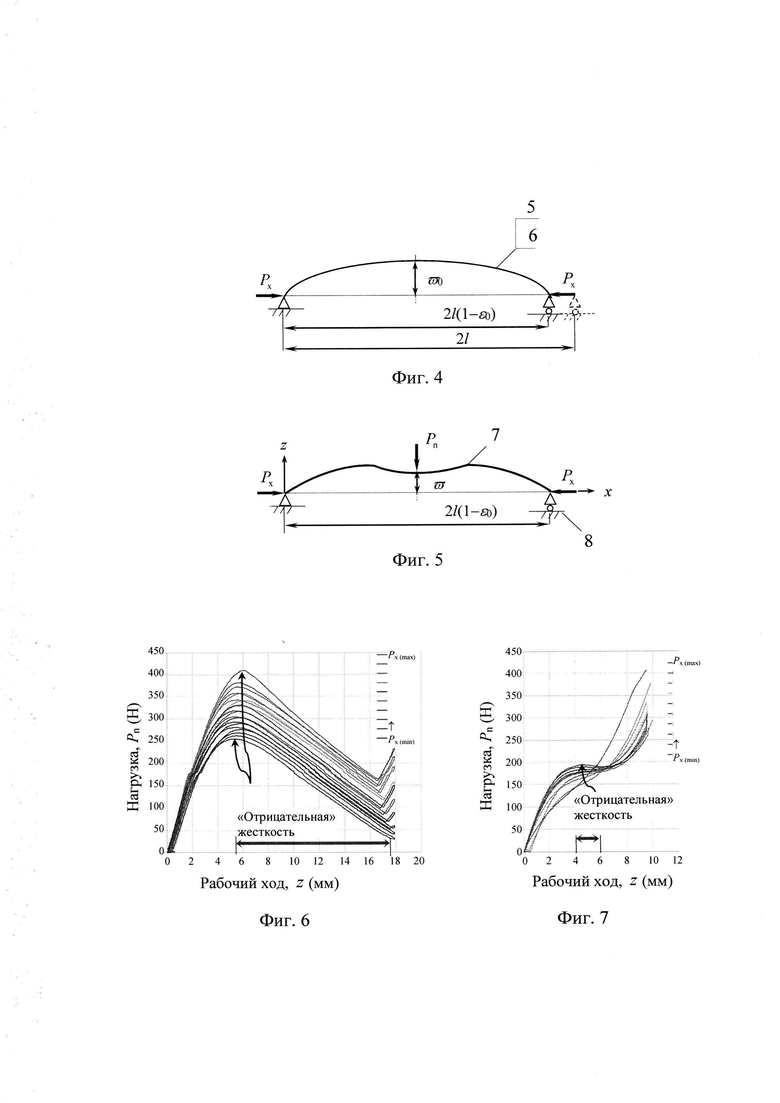
Предлагаемое изобретение поясняется следующими примерами, где на фиг. 1 показан вариант компоновки опытного образца виброизолирующего механизма, на фиг. 2 - опытный образец дополнительного упругого элемента в виде, например, балки из композита (пакет тонкостенных элементов из углеволокна) в процессе стендовых испытаний, на фиг. 3 - опорный элемент с размещенными в нем дополнительным упругим элементом и устройством регулирования жесткости при закритическом деформировании «в большом» и величины рабочего хода дополнительного упругого элемента, на фиг. 4 - расчетная схема дополнительного упругого элемента при закритическом деформировании в «большом», на фиг. 5 - расчетная схема дополнительного упругого элемента в исходном деформированном состоянии, на фиг. 6 -статическая (упругая) характеристика дополнительного упругого элемента, выполненная из композита, в сравнении с характеристикой прототипа (см. фиг. 7), на фиг. 8 - статическая (упругая) характеристика заявляемого виброизолирующего механизма, в сравнении с характеристикой прототипа (см. фиг. 9), на фиг. 10 - антифрикционные характеристики вкладышей из композита вида «Al-Al2O3», в сравнении с известными антифрикционными материалами, на фиг. 11 - вибрационная (частотная) характеристика системы, в сравнении с характеристикой прототипа (см. фиг. 12), на фиг. 13 -виброизолирующая система прецизионного оптического прибора, включающая опытный образец виброизолирующего механизма в процессе производственных испытаний, на фиг. 14 - вибрационные (временные) характеристики системы, показанной на фиг. 13, на фиг. 15 - характеристика вибрационного шума при использовании композита на основе сверхвысокомолекулярного полиэтилена с различными полидисперсными наполнителями, при варьировании их концентрации.
Виброизолирующий механизм (см. фиг. 1) включает направляющее устройство, состоящее из жестких входного элемента 1, установленного на вибрирующем основании (источнике вибраций), и выходного элемента 2, подвижно взаимосвязанных с помощью жесткого промежуточного элемента 3, обеспечивающего возможность пространственного относительного движения элементов 1 и 2 и выполненного в виде, например, одного или нескольких тел качения из композита на основе сверхвысокомолекулярного полиэтилена, основной упругий элемент с «положительной» жесткостью для обеспечения несущей способности механизма при заданном статическом нагружении системы, и выполненный, например, в виде пружин 4, соединяющих элементы 1 и 2, а также дополнительный упругий элемент (см. фиг. 2), выполненный в виде, например, пакета тонкостенных элементов из углеволокна и состоящего из жестко связанных между собой периферийных частей 5 и 6, а также центральной части 7 знакопеременной жесткости, при этом опорные участки дополнительного упругого элемента установлены в опорном устройстве 8 (см. фиг. 3), закрепленном, в свою очередь, на элементе 2, а центральная часть 7 данного упругого элемента подвижно опирается на элемент 3.
Механизм, для упрощения настройки на закритическое деформирование, целесообразно снабдить (см. фиг. 3) устройством регулирования жесткости и величины рабочего хода дополнительного упругого элемента, который может быть выполнен в виде, например, передачи винт-гайка, гайка 9 которой подвижно соединена с периферийными частями 5 и 6 данного упругого элемента, а винт 10 соединен с опорным элементом 8.
Кроме того, опорные участки дополнительного упругого элемента могут быть снабжены вкладышами 11 для взаимодействия с опорным элементом 8.
Для точной настройки («тюнинга») механизма для работы на заданном участке диапазона минимумов суммарной жесткости обоих упругих элементов, введен регулятор 12 начального положения рабочей точки. При малых значениях статической нагрузки (до 600 Н), регулирование выполняют вручную, при нагрузках свыше 1000 Н - с помощью устройства активного управления с микроконтроллером (не показан).
Предлагаемый способ виброизоляции осуществляют с помощью виброизолирующего механизма, а механизм работает, следующим образом.
До начала движения виброизолирующей системы, выполняют упругое закритическое деформирование «в большом» дополнительного упругого элемента, исходя из расчетного значения безразмерного параметра  в пределах расчетного ряда значений параметра, для получения заданной величины стрелы статического прогиба
в пределах расчетного ряда значений параметра, для получения заданной величины стрелы статического прогиба  как иллюстрируется расчетной схемой на фиг. 4. Для этого (см. фиг. 3) вращают винт 10, толкая гайку 9 и, соответственно, перемещая периферийные части 5 и 6 данного упругого элемента, до получения заданного значения стрелы прогиба Далее (см. фиг. 1 и фиг. 5) нагружают, совместно с основным упругим элементом 4, центральную часть 7 дополнительного упругого элемента номинальной статической нагрузкой
как иллюстрируется расчетной схемой на фиг. 4. Для этого (см. фиг. 3) вращают винт 10, толкая гайку 9 и, соответственно, перемещая периферийные части 5 и 6 данного упругого элемента, до получения заданного значения стрелы прогиба Далее (см. фиг. 1 и фиг. 5) нагружают, совместно с основным упругим элементом 4, центральную часть 7 дополнительного упругого элемента номинальной статической нагрузкой  соответствующей подрессоренной массе объекта защиты (не показан), до получения заданного диапазона прогибов
соответствующей подрессоренной массе объекта защиты (не показан), до получения заданного диапазона прогибов  в пределах рабочего хода механизма.
в пределах рабочего хода механизма.
При закритическом деформировании в «большом», согласно заданному значению параметра жесткость дополнительного упругого элемента из композита (например, на основе углеволокна) становится «отрицательной» на достаточно протяженном участке рабочем ходе механизма (см. фиг. 6).
При этом (см фиг. 7), протяженность участка «отрицательной» жесткости при закритическом деформировании в «малом»  геометрически и динамически подобного дополнительного упругого элемента прототипа (из пружинной стали с дополнительной термообработкой), в 5-6 раз меньше. В случае закритического деформирования в «большом», при той же величине
геометрически и динамически подобного дополнительного упругого элемента прототипа (из пружинной стали с дополнительной термообработкой), в 5-6 раз меньше. В случае закритического деформирования в «большом», при той же величине  дополнительный упругий элемент прототипа переходит в пластическое состояние, т.е. становится неработоспособным.
дополнительный упругий элемент прототипа переходит в пластическое состояние, т.е. становится неработоспособным.
Экспериментальное проектирование, стендовые статические и динамические (вибрационные) испытания, а также опытная эксплуатация спроектированных образцов подтверждают адекватность расчетных моделей согласно заявляемым уравнениям с достаточно высокой точностью.
Введение дополнительного упругого элемента из высокопрочного композита, способного выдерживать закритическое деформирование «в большом», сохраняя работоспособность, в виброизолирующий механизм, увеличивает (см. фиг. 8) в 4,5-5 раз протяженность участка рабочего хода механизма, где суммарная жесткость основного и дополнительного упругих элементов минимальна, в сравнении с прототипом (см. фиг. 9), причем без увеличения размеров рабочего пространства виброизолирующей системы.
Далее, при заданной статической нагрузке, с помощью регулятора 12, выполняют «тюнинг» величины рабочего хода механизма в пределах заданного диапазона минимумов суммарной жесткости обоих упругих элементов, что также обеспечивает однозначность упругой характеристики дополнительного упругого элемента на участках прямого и обратного хода. «Тюнинг» приводит к небольшому (на 5-8%) сокращению протяженности эффективного рабочего хода. Однако это позволяет (см. фиг. 8) уменьшить структурное трение в механизме почти втрое, что крайне важно для снижения системного демпфирования и расширения диапазона виброизоляции в сторону частот, близких к нулевым значениям. Для сравнения, подобный «тюнинг» практически невозможен в механизме прототипа, т.к. здесь диапазон минимумов суммарной жесткости крайне мал (см. фиг. 9).
Дополнительное снижение сил трения в подвижных соединениях жестких элементов и, соответственно, системного демпфирования технически более легко осуществимо с помощью вкладышей 11 из сплавов легких металлов с микроплазменным оксидированием контактных поверхностей элементов. Например, для сплавов алюминия можно получить композит вида «Al-Al2O3» на контактной поверхности вкладыша. Установка таких вкладышей, при взаимодействии с опорным элементом 8, выполненным, например, из стали, снижает коэффициент трения скольжения в 8-10 раз и более (см. фиг. 10).
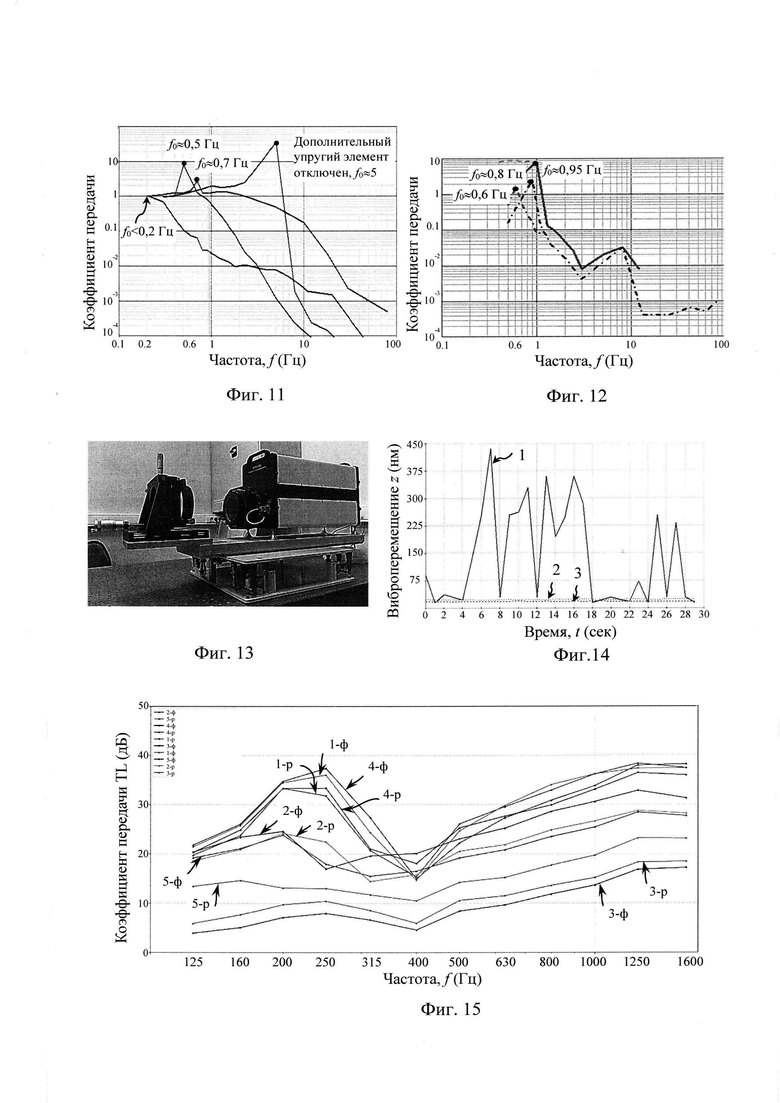
После статического нагружения и настройки («тюнинга»), приводят в движение виброизолирующую систему, состоящую из взаимосвязанных источника вибрации, виброизолирующего механизма и объекта защиты. Вибрационное движение передается от источника к объекту защиты через виброизолирующий механизм (см. примеры на фиг. 11, 12, 13 и 14). На фиг. 11 показано, что механизм снижает вибрации источника, начиная с 6-7 Гц (собственная частота системы  Гц), если использовать только основной упругий элемент 4, а дополнительный упругий элемент отключить. При включенном дополнительном упругом элементе, выполненном из композита, уровень вибраций, передаваемых на объект защиты, снижается, начиная с 1-2 Гц. При «тюнинге» система становится безрезонансной и эффективной (коэффициент передачи по виброускорению), начиная с частот, близких к нулевым значениям (>0,2 Гц). При этом, вибрации, передаваемые на объект защиты, снижаются в 50-80 раз и более. Таким образом, поставленная задача полностью решается с помощью заявляемых способа виброизоляции и виброизолирующего механизма для реализации способа.
Гц), если использовать только основной упругий элемент 4, а дополнительный упругий элемент отключить. При включенном дополнительном упругом элементе, выполненном из композита, уровень вибраций, передаваемых на объект защиты, снижается, начиная с 1-2 Гц. При «тюнинге» система становится безрезонансной и эффективной (коэффициент передачи по виброускорению), начиная с частот, близких к нулевым значениям (>0,2 Гц). При этом, вибрации, передаваемые на объект защиты, снижаются в 50-80 раз и более. Таким образом, поставленная задача полностью решается с помощью заявляемых способа виброизоляции и виброизолирующего механизма для реализации способа.
Для сравнения, с дополнительным упругим элементом прототипа (из пружинных сталей) и «тюнинге», механизм может быть эффективным, но начиная с 0,7-1,2 Гц. При этом, вибрации, передаваемые на объект защиты, снижаются (см. фиг. 12) в 1,1-1,2 раза, что недостаточно для виброизоляции любой системы «человек-машина» и ряда технических систем.
Для инфрачастотной виброизоляции прецизионного оборудования важным показателем эффективности является также коэффициент передачи по виброперемещению. Фиг. 14 показывает эффективность заявляемых способа и механизма для защиты высокоточного оптического прибора, показанного на фиг. 13. Опытный образец виброизолирующего механизма имеет грузоподъемность до 600 Н. На фиг. 14 показаны вибрационные (временные) характеристики виброизолирующей системы: график 1 -входные вибрации (в источнике), графики 2 и 3 - выходные вибрации (на объекте защиты) при пассивном (ручном) и активном (автоматическом) управлении. При применении механизма согласно заявляемому способу, активное управление имеет существенное значение при вибрациях вблизи почти нулевых частот,  Гц. На частотах >0,2 Гц, система может быть эффективной даже при пассивном управлении, а активное управление имеет вспомогательное назначение, например, для регулирования грузоподъемности системы для тяжелых объектов защиты, от 1500 Н и выше.
Гц. На частотах >0,2 Гц, система может быть эффективной даже при пассивном управлении, а активное управление имеет вспомогательное назначение, например, для регулирования грузоподъемности системы для тяжелых объектов защиты, от 1500 Н и выше.
В качестве полезной опции целесообразно выполнять контактные поверхности взаимодействующих жестких элементов 1, 2 и 3 направляющего устройства из композитов, например, на основе сверхвысокомолекулярного полиэтилена с полидисперсными наполнителями определенного типа и концентрации. Элемент 3 из такого композита обладает упругостью при малых виброперемещениях, сопоставимых с размерами технологических зазоров между жесткими элементами, и имеет при этом, достаточно высокую грузоподъемность. Опция дополнительно улучшает защиту объекта. Фиг. 15 показывает, что выполнение элемента 3 (см. фиг. 1) из подобного композита позволяет снизить TL (коэффициент передачи) вибрационного шума в акустическом спектре 125-1600 Гц на 10-30 дБ, в зависимости от структуры (плотности) полимера, типа и концентрации наполнителей, а также используемого участка рабочей (контактной) поверхности пар элементов 1-3 и 2-3. Графики 1-ф и 1-р показывают эффективность композита без наполнителей, графики 2-ф и 2-р, 3-ф и 3-р, 4-ф и 4-р, 5-ф и 5-р - с микро- и наноразмерными наполнителями разного типа, различной поверхностной активности и масс. % концентрации; здесь индексы «ф» и «р» означают основную и реверсную рабочие (контактные) поверхности.
Промышленная применимость заявляемых способа виброизоляции и виброизолирующего механизма подтверждается приведенными примерами конкретного выполнения (см. опытные образцы на фиг. 1 и фиг. 13), его дополнительного упругого элемента (см. опытный образец на фиг. 2), результатами стендовых статических (фиг. 6 и фиг. 8), вибрационных (фиг. 11) и акустических (фиг. 15) испытаний, а также примером опытной эксплуатации механизма (см. фиг. 13 и фиг. 14).
Таким образом, заявляемые способ виброизоляции и виброизолирующий механизм для реализации способа полностью обеспечивают решение поставленной задачи, а именно, эффективную виброизоляцию систем «человек-машина» и ряда технических систем, причем в расширенном диапазоне инфра- и низких частот, наиболее вредных и опасных для человека и техники, включая частоты, близкие к нулевым значениям. Это особенно важно, т.к., наряду с возможностью значительного улучшения качества виброизоляции человека и существующих типов машин и оборудования, предлагаемые способ и механизм дают возможность виброизоляции систем «человек-машина» и ряда технических систем следующего поколения, для которых крайне важна виброизоляции в диапазоне частот, близких к нулевым значениям, что не представляется возможным с помощью известных способов и механизмов. Это, в частности, ряд пилотируемых и непилотируемых летательных аппаратов, подвижной состав и инфраструктурные объекты высокоскоростного рельсового транспорта в стадии разработки (для перевозок на длинные дистанции), высокоэнергетические, дорогостоящие системы, такие, например, как ускорители заряженных частиц (стоимость ускорителя от 2 до 200 млрд. руб.) для фундаментальных научных исследований и высокотехнологичных промышленных отраслей. Установлено, что улучшение основной технической характеристики (эмиттанса) источников излучения и оптических систем ускорителей не зависит от совершенствования их конструкции и ужесточения технологических допусков. Вместе с тем, структурные инфрачастотные (особенно, 0,2-2 Гц) вибрации, усиливаемые внешними источниками техногенных и природных вибраций, стали критическим ограничивающим фактором дальнейшего перспективного развития ускорителей. Однако первые (модельные) теоретические и физические эксперименты показывают: заявляемый способ виброизоляции и виброизолирующий механизм для реализации способа могут обеспечить решение новой научно-технической и индустриальной проблемы.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВИБРОИЗОЛЯЦИИ ПИЛОТА ВЕРТОЛЕТА И ПОДВЕСКА КРЕСЛА ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2024 |
|
RU2837435C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ПИЛОТА ВЕРТОЛЕТА И ПОДВЕСКА СИДЕНЬЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2015 |
|
RU2597042C1 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНОГО СРЕДСТВА И САМОХОДНОЙ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И КОМПАКТНАЯ ПОДВЕСКА СИДЕНЬЯ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2010 |
|
RU2438888C1 |
| СПОСОБ ВТОРИЧНОГО ПОДРЕССОРИВАНИЯ ТЕЛЕЖКИ ВАГОНА ВЫСОКОСКОРОСТНОГО РЕЛЬСОВОГО ТРАНСПОРТА | 2015 |
|
RU2597428C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОИЗОЛИРУЮЩЕГО УСТРОЙСТВА КОМПАКТНОГО СИДЕНЬЯ ДЛЯ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И ВИБРОИЗОЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2001 |
|
RU2214335C2 |
| СПОСОБ ВИБРОИЗОЛЯЦИИ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И СИДЕНЬЕ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2115570C1 |
| Способ исследования эффективности виброизолирующего устройства с тросовыми элементами | 1985 |
|
SU1401313A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2475658C2 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2440523C2 |
| УСТРОЙСТВО РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ПОДВЕСКИ КОМПАКТНОГО СИДЕНЬЯ | 2001 |
|
RU2216461C2 |

Группа изобретений относится к области машиностроения. Между вибрирующим основанием и объектом виброзащиты размещают виброизолирующий механизм. Способ осуществляют путем регулирования и минимизации суммарной жесткости основного упругого элемента и дополнительного упругого элемента знакопеременной жесткости за счет деформирования дополнительного упругого элемента в закритической области «в большом». После чего нагружают виброизолирующую систему в направлении движения. Далее регулируют протяженность рабочего хода механизма, удерживая величину суммарной жесткости в заданном диапазоне минимумов. Виброизолирующий механизм включает направляющее устройство, содержащее подвижно взаимосвязанные входной, выходной и промежуточный жесткие элементы, основной упругий элемент и дополнительный упругий элемент знакопеременной жесткости. Механизм дополнительно снабжен устройством регулирования жесткости при закритическом деформировании «в большом» и величины рабочего хода дополнительного упругого элемента. Дополнительный упругий элемент выполнен в виде пакета взаимосвязанных тонкостенных элементов из композитного материала. Достигается повышение эффективности виброизоляции в диапазоне инфрачастот без увеличения размеров рабочего пространства системы. 2 н. и 6 з.п. ф-лы, 15 ил.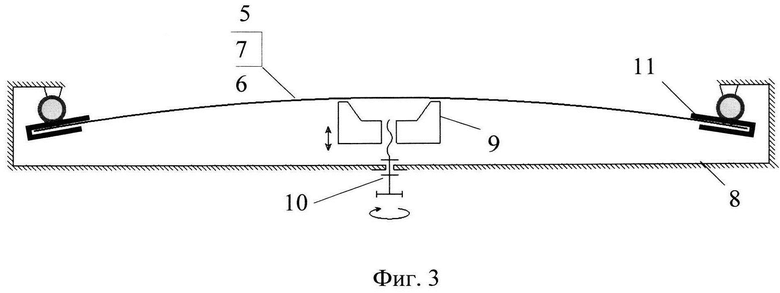
1. Способ виброизоляции, согласно которому между вибрирующим основанием и объектом виброзащиты размещают виброизолирующий механизм, снабженный основным упругим элементом и дополнительным упругим элементом знакопеременной жесткости, затем регулируют и минимизируют суммарную жесткость упругих элементов, отличающийся тем, что снижение суммарной жесткости осуществляют путем деформирования дополнительного упругого элемента в закритической области «в большом» и последующего его нагружения в направлении движения системы так, что значения безразмерных силы и упругой деформации при статическом нагружении дополнительного упругого элемента соотносятся как


где  - безразмерная сила нагружения дополнительного упругого элемента;
- безразмерная сила нагружения дополнительного упругого элемента;
 - безразмерная упругая деформация (прогиб в направлении движения системы) данного упругого элемента;
- безразмерная упругая деформация (прогиб в направлении движения системы) данного упругого элемента;
 - переменный параметр перехода от закритического деформирования «в малом» к закритическому деформированию «в большом», здесь
- переменный параметр перехода от закритического деформирования «в малом» к закритическому деформированию «в большом», здесь  - эффективный размер до деформирования,
- эффективный размер до деформирования,  - сила закритического деформирования до необходимой величины,
- сила закритического деформирования до необходимой величины,  - изгибная жесткость дополнительного упругого элемента в направлении движения системы; далее регулируют протяженность рабочего хода механизма, удерживая величину суммарной жесткости упругих элементов в заданном диапазоне минимумов, без увеличения размеров рабочего пространства системы, и обеспечивая однозначность упругой характеристики дополнительного упругого элемента в направлениях прямого и обратного хода.
- изгибная жесткость дополнительного упругого элемента в направлении движения системы; далее регулируют протяженность рабочего хода механизма, удерживая величину суммарной жесткости упругих элементов в заданном диапазоне минимумов, без увеличения размеров рабочего пространства системы, и обеспечивая однозначность упругой характеристики дополнительного упругого элемента в направлениях прямого и обратного хода.
2. Виброизолирующий механизм для реализации способа по п. 1, включающий направляющее устройство с подвижно взаимосвязанными входным, выходным и промежуточными жесткими элементами, основной упругий элемент «положительной» жесткости и дополнительный упругий элемент знакопеременной жесткости, установленный в опорном устройстве с возможностью деформирования, отличающийся тем, что механизм дополнительно снабжен устройством регулирования жесткости при закритическом деформировании «в большом» и величины рабочего хода дополнительного упругого элемента, при этом дополнительный упругий элемент выполнен в виде пакета взаимосвязанных тонкостенных элементов из композитного материала, обеспечивающего возможность закритического деформирования «в большом» дополнительного упругого элемента при сохранении работоспособности.
3. Виброизолирующий механизм по п. 2, отличающийся тем, что дополнительный упругий элемент может быть выполнен (в зависимости от статической нагрузки системы) в виде одного или нескольких пакетов взаимосвязанных тонкостенных элементов из углеродного волокна.
4. Виброизолирующий механизм по п. 2, отличающийся тем, что дополнительный упругий элемент может быть выполнен (в зависимости от статической нагрузки системы) в виде одного или нескольких пакетов взаимосвязанных тонкостенных элементов из арамидов.
5. Виброизолирующий механизм по п. 2, отличающийся тем, что дополнительный упругий элемент может быть выполнен (в зависимости от статической нагрузки системы) в виде одного или нескольких пакетов взаимосвязанных тонкостенных элементов на основе графенов.
6. Виброизолирующий механизм по п. 2, отличающийся тем, что опорное устройство снабжено вкладышами, обеспечивающими минимизацию сил трения контактных поверхностей в подвижных соединениях с дополнительным упругим элементом.
7. Виброизолирующий механизм по любому из пп. 2-6, отличающийся тем, что устройство регулирования жесткости и величины рабочего хода дополнительного упругого элемента размещено между выходным жестким элементом направляющего устройства и дополнительным упругим элементом.
8. Виброизолирующий механизм по любому из пп. 2-6, отличающийся тем, что контактные поверхности подвижных соединений жестких элементов направляющего устройства выполнены из композитов на основе сверхвысокомолекулярного полиэтилена с возможностью изменения его трибологических характеристик с помощью полидисперсных наполнителей для снижения уровня низкочастотного вибрационного шума.
| ВИБРОЗАЩИТНАЯ ПЛАТФОРМА | 1992 |
|
RU2093730C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖЕСТКОСТИ ВИБРОИЗОЛИРУЮЩЕГО УСТРОЙСТВА КОМПАКТНОГО СИДЕНЬЯ ДЛЯ ЧЕЛОВЕКА-ОПЕРАТОРА ТРАНСПОРТНО-ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ И ВИБРОИЗОЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 2001 |
|
RU2214335C2 |
| ДВЕРЬ, ДВЕРНОЕ ПОЛОТНО И ЗАПОРНАЯ СИСТЕМА ДВЕРИ | 2004 |
|
RU2270310C2 |
| JP 62242153 A, 22.10.1987. | |||

