Изобретение относится к машиностроению, а именно к бесконтактным опорным устройствам с электромагнитными подшипниками, и может быть использовано при создании, например, газоперекачивающих агрегатов, турбодетандеров, электрошпинделей, турбомолекулярных насосов и других высокооборотных машин и агрегатов с активным магнитным подвесом роторов.
Известно, что на работу магнитного подвеса отрицательно влияют первые формы продольных упругих колебаний вала, так как они, как правило, близки к рабочему диапазону частот вращения устройства или находятся в нем. Вследствие работы в резонансной области происходит увеличение амплитуды колебаний вала в зазоре магнитной опоры, что может привести к нарушению работоспособности магнитного подвеса и устройства [1].
Для снижения влияния указанного вида колебаний вала радиальный электромагнит и датчик положения вала устанавливают в места, выбранные с учетом распределения узлов первых форм колебаний вала.
Однако изменение динамических характеристик и режимов работы устройства может вызвать такое изменение распределения узлов первых форм колебаний вала, что появляется необходимость изменения мест расположения радиального датчика и электомагнита в опоре.
Известна магнитная опора, содержащая корпус, радиальный и осевой электромагниты, радиальный и осевой датчики положения вала, при этом статоры электромагнитов и датчиков разъемно соединены с корпусом, а их роторы установлены на валу [2].
Известная магнитная опора, принятая в качестве прототипа, выполнена с возможностью замены статоров на аналогичные. Однако, в известной конструкции не предусмотрена возможность перестановки на другие места в корпусе и на валу активных элементов опоры, поэтому для работы в новых условиях необходима замена ее на опору с другим расположением датчиков и электромагнитов.
Таким образом, известную магнитную опору нельзя использовать в устройствах, предназначенных для работы в условиях изменения динамических параметров и/или режимов работы, что сужает область применения и удорожает эксплуатационные расходы.
Заявленное изобретение решает задачу создания унифицированной магнитной опоры для активного магнитного подвода роторов устройств, характеризующихся различными динамическими параметрами и/или режимами работы, а также устройств, работающих в условиях, при которых указанные параметры могут изменяться.
Технический результат, достигаемый изобретением, заключается в обеспечении возможности изменения расположения датчиков положения вала и электромагнитов путем их перестановки в магнитной опоре без ее доработки.
Поставленная задача решается тем, что в известной магнитной опоре, содержащей корпус, радиальный и осевой электромагниты, радиальный и осевой датчики положения вала, при этом статоры электромагнитов и датчиков положения вала разъемно соединены с корпусом, а их роторы установлены на валу, новым является то, что в ней корпус выполнен из трех частей с разъемным соединением между ними, в одной из частей корпуса размещены статоры датчиков положения вала, а в двух других частях корпуса размещены соответственно статор радиального и статор осевого электромагнита, в указанных частях корпуса расстояния между торцевыми привалочными плоскостями равны между собой, а места крепления на сопрягаемых частях корпуса совпадают друг с другом при соединении частей корпуса в любой последовательности, все роторы выполнены с возможностью взаимной перестановки на валу для размещения под соответствующими статорами, причем радиальный и осевой датчики положения вала выполнены с общим ротором.
Кроме того, ротор датчиков положения вала выполнен в виде диска, при этом статор осевого датчика образует рабочие зазоры с торцевыми поверхностями диска, а статор радиального датчика образует рабочий зазор с цилиндрической поверхностью диска.
Кроме того, вал снабжен втулкой, на которую установлены роторы электромагнитов и датчиков положения вала.
Действительно, выполнение корпуса магнитной опоры составным из трех частей с возможностью их разъема и сопряжения между собой в любой последовательности, выполнение роторов с возможностью их перестановки на валу для установки под соответствующими статорами, размещенными в частях корпуса, а также наличие общего ротора у датчиков положения вала позволяет переставлять активные элементы опоры при изменении распределения узлов первых форм упругих колебаний вала без доработки опоры, а также устанавливать ее в устройства с различными техническими характеристиками.
Таким образом, унификация конструктивных узлов заявляемой магнитной опоры позволяет осуществить ее серийное производство, а также создает возможность использования унифицированной опоры в различных машинах и агрегатах.
На основании вышеизложенного можно сделать вывод о достаточности существенных признаков, представленных в независимом пункте формулы изобретения, для получения указанного заявителем технического результата.
На чертеже представлен общий вид заявляемой магнитной опоры в разрезе, ниже осевой линии разреза опора изображена без кожуха.
Магнитная опора, представленная на чертеже, является одним из вариантов выполнения и содержит кожух 1, который присоединяется к изделию с ротором на магнитном подвесе, на валу 2 которого установлена втулка 3 с закрепленными на ней тремя роторами 4, 5, 6, расположенными под статорами 7 и 8, 9 и 10 соответственно осевого и радиального электромагнитов, осевого и радиального датчиков положения вала, которые закреплены в трех разъемно соединенных между собой частях 11, 12, 13 корпуса, образующих составной корпус магнитной опоры. В каждой из указанных частей корпуса торцевые привалочные плоскости соответственно 14 и 15, 16 и 17, 18 и 19 расположены на одном и том же расстоянии друг от друга, причем места крепления совпадают друг с другом при соединении частей 11, 12 и 13 в любой последовательности, а посадочные места роторов 4, 5 и 6 на втулке 3 и элементы фиксации выполнены таким образом, что обеспечивается возможность взаимной перестановки роторов на втулке 3 (или на валу 2, если роторы устанавливают на вал без втулки). Ротор 6 выполнен в виде диска, с цилиндрической поверхностью которого образует рабочий зазор статор 10 радиального датчика показания вала, а с торцевыми поверхностями того же диска образует рабочие зазоры статор 9 осевого датчика. Статоры 9 и 10 объединены между собой и установлены в части 13 корпуса с возможностью перемещения и фиксации в радиальном направлении.
Статор 7 осевого электромагнита, размещенный в части 11 корпуса, состоит из двух отдельных магнитопроводов 20 и 21 с обмотками управления. Каждый из магнитопроводов образует рабочий зазор с соответствующей торцевой поверхностью ротора 4, а с цилиндрической поверхностью ротора 5 образует рабочий зазор статор 8 радиального электромагнита. Втулка 3 фиксируется в осевом направлении гайкой 22 со стороны конца вала 2, с этой же стороны расположен подшипниковый узел, включающий страховочный подшипник 23, установленный на конце втулки 3, фланец 24 и подшипниковый щит 25, закрепленный болтовым соединением на корпусе и кожухе 1, который защищает от повреждения части корпуса и выводы обмоток статоров (не показаны). Статоры электромагнитов и датчиков крепятся к соответствующим частям корпуса посредством переходных втулок и фиксирующих элементов, а также резьбовыми соединениями. Части 11, 12, 13 корпуса скреплены между собой, например, болтовым соединением и разъемно соединены с корпусом изделия. Магнитная опора может быть выполнена и без защитного кожуха, как это показано на чертеже ниже осевой линии разреза общего вида устройства.
Рассмотрим последовательность операций, выполняемых при разборке магнитной опоры, представленной на чертеже.
В начале разбирают подшипниковый узел страховочного подшипника 23, освобождают его и снимают с втулки 3, затем снимают кожух 1 (в том случае, когда он есть), поднимают статоры 9 и 10 и, разъединив крепление частей 11, 12 и 13 корпуса, последовательно снимают: часть 13 корпуса вместе со статорами 9 и 10, ротор 6, часть 12 корпуса вместе со статором 8, ротор 5. Затем освобождают магнитопровод 21 и вынимают его, после этого снимают ротор 4 и последними снимают часть 11 корпуса с магнитопроводом 20.
Сборку магнитной опоры ведут в соответствии с выбранной последовательностью расположения электромагнитов и датчиков положения вала, начиная с элементов конструкции магнитной опоры, примыкающих к изделию, и заканчивают установкой кожуха (если он есть) и сборкой узла страховочного подшипника.
Таким образом, изобретение позволяет создать унифицированную магнитную опору для устройств с активным магнитным подвесом роторов, обеспечивает возможность серийного изготовления ее и применения в устройствах, характеризующихся широким диапазоном изменения динамических параметров и/или режимов работы.
Источники информации.
1. Труды ВНИИЭМ. Магнитный подвес роторов электрических машин и механизмов, том 39, М., 1989, с. 76-87.
2. Заявка Франции N 2377551, F 16 C 32/04, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНАЯ ОПОРА ДЛЯ АГРЕГАТА | 1997 |
|
RU2129228C1 |
| ГИБРИДНЫЙ МАГНИТНЫЙ ПОДШИПНИК С ОСЕВЫМ УПРАВЛЕНИЕМ | 2013 |
|
RU2540215C1 |
| МАГНИТНЫЙ ПОДВЕС РОТОРА УСТРОЙСТВА | 1992 |
|
RU2037685C1 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158472C2 |
| СПОСОБ ОЦЕНКИ РЕГУЛИРУЕМЫХ СИГНАЛОВ ТРЕХФАЗНОГО ДВИГАТЕЛЯ С КОРОТКОЗАМКНУТЫМ РОТОРОМ | 1998 |
|
RU2158471C2 |
| МАГНИТНАЯ ОПОРА КОМПРЕССОРА | 2003 |
|
RU2251033C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2178142C2 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ЭНЕРГИИ ТЕКУЧИХ СРЕД | 1996 |
|
RU2116503C1 |
| ОПОРНЫЙ УЗЕЛ МАГНИТНОГО ПОДВЕСА РОТОРА | 2014 |
|
RU2577437C1 |
| СПОСОБ УПРАВЛЕНИЯ M-ФАЗНЫМ ЭЛЕКТРОДВИГАТЕЛЕМ ПЕРЕМЕННОГО ТОКА С 2M-ТИРИСТОРНЫМ КОММУТАТОРОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1994 |
|
RU2092965C1 |
Изобретение относится к бесконтактным опорным устройствам с электромагнитными подшипниками и может быть использовано при создании, например, газоперекачивающих агрегатов и других высокооборотных машин с активным магнитным подвесом роторов. Достигаемый технический результат заключается в обеспечении возможности изменения расположения датчиков положения вала и электромагнитов путем их перестановки в магнитной опоре без ее доработки. Новым является то, что корпус магнитной опоры выполнен из трех частей с разъемным соединением между ними. При этом в одной из частей корпуса размещены статоры датчиков положения вала, а в двух других частях - соответственно статоры радиального и осевого электромагнитов. Расстояния между торцевыми привалочными плоскостями частей корпуса равны между собой, а места крепления совпадают друг с другом при соединении частей корпуса в любой последовательности. Все роторы выполнены с возможностью взаимной перестановки на валу, причем у датчиков положения ротор выполнен общим. Изобретение позволяет создать унифицированную магнитную опору для устройств, характеризующихся широким диапазоном изменения динамических параметров и/или режимов работы. 2 з.п. ф-лы, 1 ил.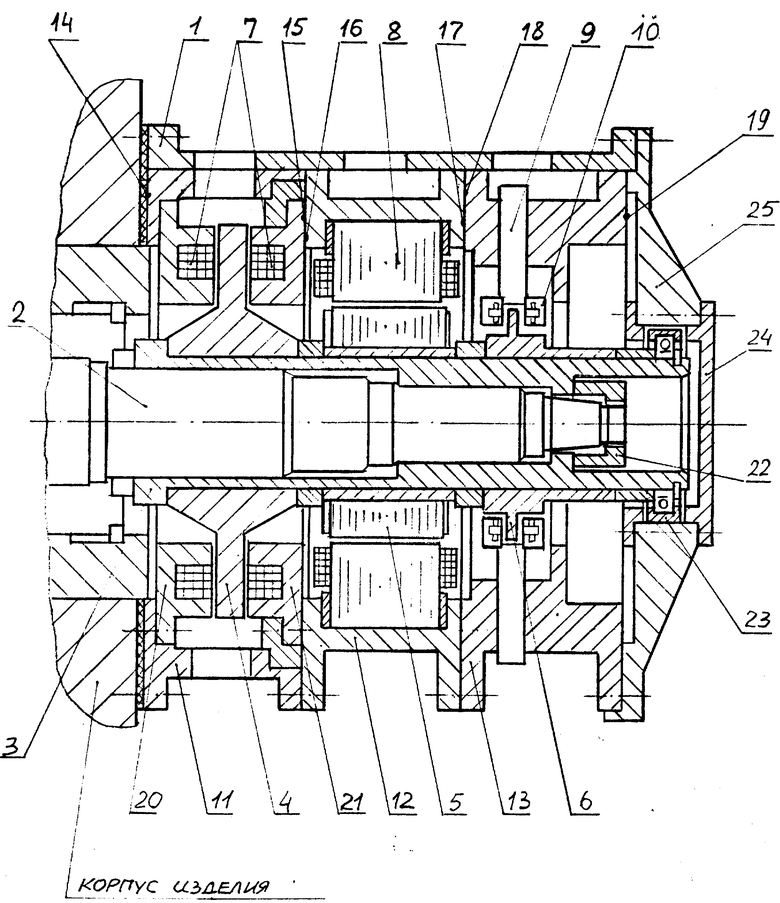
| FR, заявка, 2377551, F 16 C 32/04, 1978. |

