Изобретение относится к определению направления истинного меридиана объектов на земле для навигационных или топографических целей.
Известен указатель северного направления на волоконно-оптическом гироскопе [1], где гироскоп устанавливается на приблизительно горизонтальную платформу и приводится в движение по 4 последовательным угловым положениям с интервалом 90°, сигнал гироскопа усредняется компьютером по каждой позиции азимутальных точек. Недостатком данного указателя является то, что методика определения направления на север требует поворота платформы на 360° и введения токоподвода, тем самым увеличивая время определения меридиана.
Известен способ определения угловых перемещений объекта лазерным гироскопом [2], заключающийся в том, что кольцевой лазер приводят в колебательное движение относительно основания, генерируют основную стабилизированную по частоте и дополнительную последовательности импульсов, измеряют выходной сигнал лазерного гироскопа за время между импульсами дополнительной последовательности, измеряют интервалы времени между импульсами дополнительной последовательности и между импульсами основной и дополнительной последовательностей, а выходной сигнал лазерного гироскопа за время между импульсами основной последовательности определяют с использованием измеренных величин, дополнительно измеряют угловую скорость колебаний лазера относительно основания, импульсы дополнительной последовательности генерируют в моменты времени, когда эта скорость равна нулю, а измерение выходного сигнала лазерного гироскопа производят как между четными, так и между нечетными импульсами дополнительной последовательности. Этот способ упрощает реализацию при сохранении точности определение угловых перемещений. Недостатком является зависимость точности от амплитуды угловых колебаний и характера изменения ее от времени. В техническом решении этот закон принят линейным.
Известно устройство для определения направления на север [3], содержащее три неподвижных датчика угловой скорости, углы между направлениями осей чувствительности которых составляют 120°, расположенных в горизонтальном плане. Направление на север определяется на основе максимального значения синусной кривой сигнала, получаемого на операционном модуле с датчиков. Недостатком данного устройства является неподвижное положение датчиков и строго горизонтальное положение платформы, из-за чего отсутствует возможность компенсации дрейфа выходных сигналов датчиков от наклона платформы.
Известен лазерный гирокомпас 9А184 [4], статического типа, который измеряет проекции ускорения свободного падения на измерительные оси акселерометра и проекцию угловой скорости вращения земли на ось чувствительности лазерного датчика угловой скорости, который расположен в плоскости горизонта. Блок измерений включает устройство поворота в виде шагового электродвигателя на 8 положений, из которых используются четыре рабочих положения через 90°±5'', лазерный ДУС, два акселерометра, датчик углового положения платформы, блок электроники. Этот гирокомпас имеет время определения азимута 8 мин, погрешность азимута с вероятностью 0,9 не более 10'. Недостатком данного указателя является то, что методика определения направления на север требует поворота платформы на 360°, тем самым увеличивая время определения меридиана.
Известен способ определения направления истинного меридиана [5], при котором ВОГ устанавливают таким образом, что его вектор чувствительности находится в плоскости горизонта, осуществляют поворот ВОГ вокруг оси, перпендикулярной плоскости горизонта посредством его вращения с постоянной угловой скоростью так, что его вектор чувствительности остается в плоскости горизонта, проводят измерения выходного сигнала посредством его фазового детектирования на частоте вращения, определяя при этом фазу выходного сигнала ВОГ, соответствующую азимуту. Способ позволяет повысить точность определения направления истинного меридиана. Недостатками его являются значительное время определения из-за необходимости полного оборота платформы и низкая точность из-за шума в коллекторной паре токосъемника устройства, реализующего способ.
Основные частоты спектрального состава электрического шума, генерируемого при пропускании постоянного тока через контакт элементов, находятся в области от 0 до 1,5 кГц и носят характер 1/f. При снижении скорости скольжения элементов спектр смещается в область более низких частот. Максимум амплитуды контактного шума равен 22 мкВ [6]. Для лазерного гирокомпаса это приводит к увеличению погрешности в 2 раза.
Задачей изобретения является уменьшение времени определения и повышение точности определения направления истинного меридиана наземного транспорта за счет введения гибкого токоподвода и уменьшение соотношения сигнал-шум.
Поставленная задача решается следующим образом: в способе определения направления истинного меридиана наземного транспорта, при котором датчик угловой скорости вращают с угловой скоростью вокруг оси, перпендикулярной плоскости горизонта, производят измерения угла поворота платформы и выходного сигнала датчика угловой скорости, определяют при этом азимут, отличающийся тем, что на платформе устанавливают n+1 датчиков угловой скорости (n=1, 2, 3...), оси чувствительности которых расположены или в плоскости платформы, или по конусу под углом 45 град к плоскости платформы, располагая их под углом 360/(n+1) друг к другу, и осуществляют колебательное движение на угол ±(360/(n+1))+Δ (Δ - значение угла перекрытия) с угловой скоростью больше угловой скорости транспорта в пределах угла 360/(n+1), по выходным сигналам датчиков строят зависимость горизонтальной составляющей угловой скорости Земли от угла поворота платформы, находят ее максимум и минимум и вычисляют соответствующий им угол азимута. При вариантах расположения датчиков измеряют углы крена и тангажа оси чувствительности одного из датчиков угловой скорости от датчиков угла крена и тангажа и вычисляют угол азимута с учетом изменения проекций угловой скорости вращения Земли.
Изобретение поясняется следующими чертежами.
На фиг.1 представлено устройство для реализации предложенного способа с датчиками, оси чувствительности которых расположены в одной плоскости.
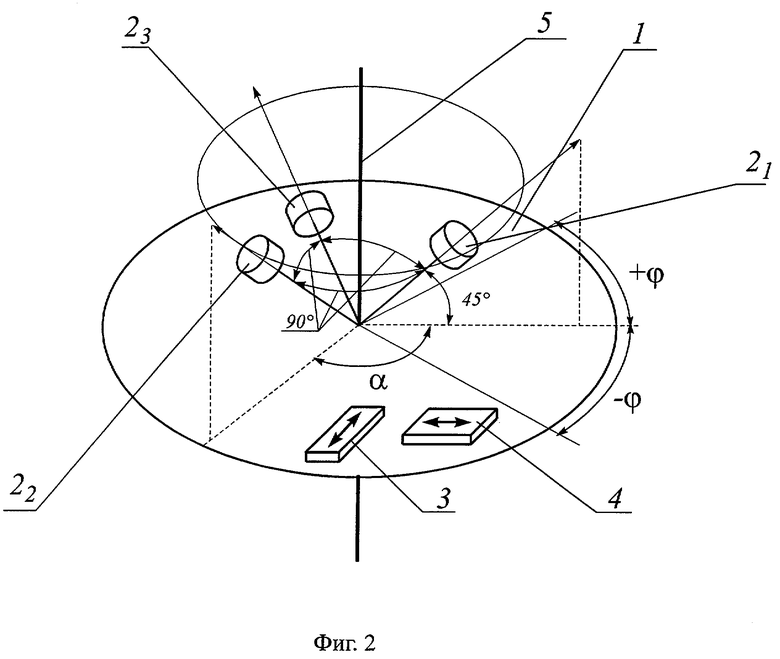
На фиг.2 представлено устройство для реализации предложенного способа с ортогональным расположением осей чувствительности датчиков.
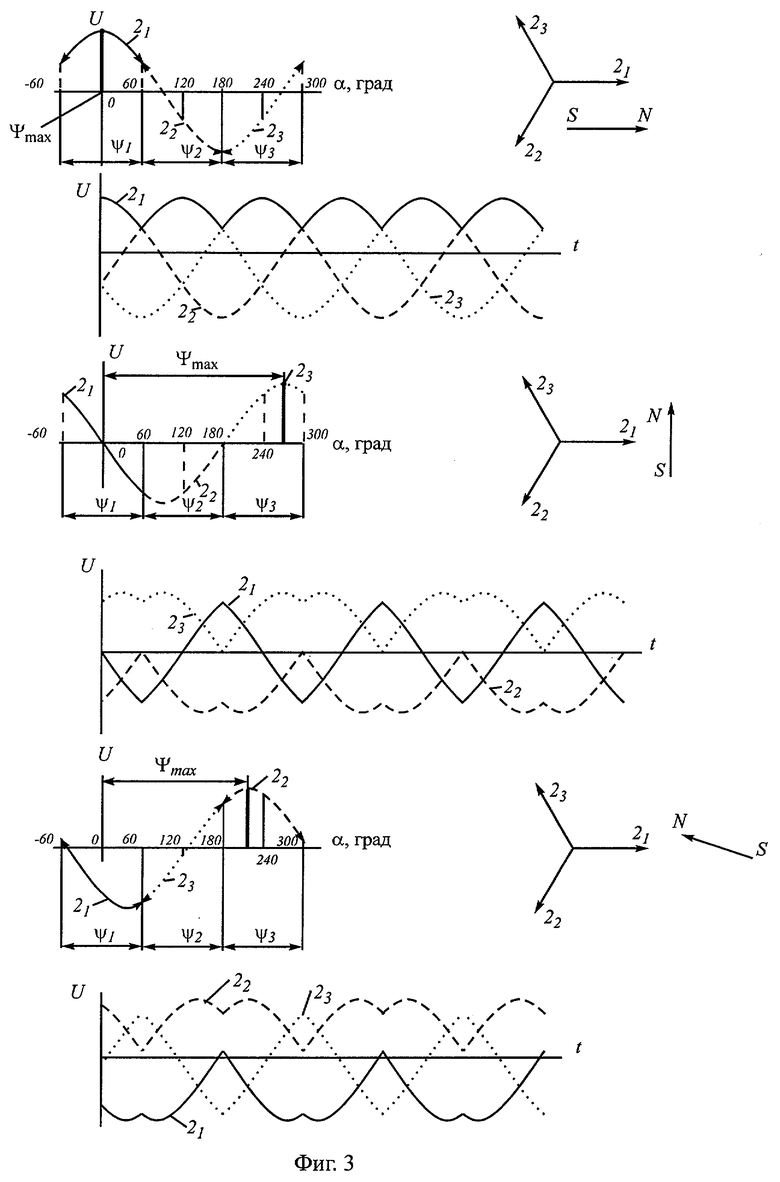
На фиг.3 представлена временная диаграмма работы.
Устройство состоит из вращающейся платформы 1, на которой закреплены датчики угловой скорости 2, расположенные под углом α друг к другу, оси чувствительности которых перпендикулярны оси вращения платформы и расположены в плоскости платформы 1. В случае ортогонального расположения приборного трехгранника датчиков угловой скорости 2 их оси чувствительности располагают по конусу под углом 45° к плоскости платформы 1. Угол α для трех ДУСов с расположением осей чувствительности в радиальном направлении равен 120°, для четырех - 90°, для шести - 60°. Датчики угла крена и тангажа 3, 4 с ориентацией осей чувствительности по датчику 21 и перпендикулярно ему расположены в плоскости платформы 1. Платформа 1 закреплена на оси 5 в опорах 6 (шарикоподшипники). На оси 5 подвеса платформы 1 расположены датчик угла 7 поворота вокруг оси Z и колесо 8 ременной передачи. Другое колесо 9 передачи закреплено на валу двигателя 10. Питание на датчики угловой скорости 2 и съем их выходного сигнала осуществляется через гибкие токоподводы 11 на блок управления и индикации 12. Входы датчиков 2-4 соединены с блоком питания 13.
Предложенный способ определения направления истинного меридиана наземного транспорта осуществляют следующим образом. Платформу 1, например, с тремя датчиками угловой скорости 21, 22, 23, расположенными под углом 120°, устанавливают таким образом, что векторы чувствительности датчиков 2 находились в плоскости платформы вокруг оси, перпендикулярной ей. Для варианта ортогонального расположения приборного трехгранника датчиков угловой скорости 2 (фиг.2) их оси чувствительности располагают по конусу под углом 45° к плоскости платформы 1. Осуществляют угловые повороты платформы 1 в опорах вокруг оси Z с помощью двигателя 10 через передачу с колесами 8, 9 на угол ±60°+Δ (Δ - значение угла перекрытия) с постоянной угловой скоростью больше угловой скорости транспорта в пределах 60° вокруг оси, перпендикулярной плоскости платформы. Угловое положение платформы 1 в процессе колебаний контролируют датчиком угла 7. Электрические сигналы, снимаемые с датчиков 2 при угловых колебаниях платформы 1 вокруг вертикальной оси Z, в положительном и отрицательном направлении вращения платформы 1 складываются и усредняются. При этом проекции угловой скорости вращения платформы 1 на оси чувствительности датчиков 2 при их ортогональном расположении будут компенсироваться и исключаться из дальнейшей обработки; аналогичным образом будут частично компенсироваться дрейфы нулевых сигналов датчиков 2. В итоге электрические сигналы датчиков 21, 22, 23 будут иметь для датчика с аналоговым выходом вид гармонической функции Ui=kiωзcosϕcos(2πƒ0t+α+αyi)+U0i, ограниченной углами ±60°, выбираемыми из числа датчиков и допустимых углов поворота токоподвода; здесь U0i - дрейфы нулевых сигналов i-го датчика с аналоговым выходом; ki - калиброванные масштабные коэффициенты i-го датчика с аналоговым выходом, ωз - угловая скорость вращения земли, ϕ - географическая широта точки земли, α - угол азимута, αyi - угол начальной установки i-го датчика (0°, 120°, 240°). Вид сигналов при углах азимута (ϕ=0°, 90° и при произвольном угле ϕ' показан на временной диаграмме работы установки i-го датчика (0°, 120°, 240°). Вид сигналов при углах азимута ϕ=0°, 90° и при произвольном угле ϕ' показан на временной диаграмме работы (фиг.2). Алгоритмически из отрезков сигналов датчиков 21, 22, 23 формируется единая кривая гармонической функции. В дальнейшем при ее обработке находится значение максимального сигнала одного из датчиков 21, 22, 23 Δψi относительно опорной точки, определяемой с помощью датчика угла 11. Угол азимута находится по формуле ψ=Δψi+αyi.
Измерение углов крена и тангажа поворота платформы 1 от плоскости горизонта осуществляют с помощью датчиков углов крена и тангажа 3 и 4.
При горизонтальном расположении платформы и трех датчиков угловой скорости сигналы с датчиков 2 имеют вид:

При наличии углов тангажа 9 сигналы датчиков 2 примут вид:
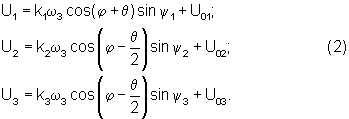
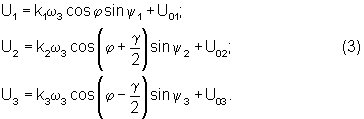
При наличии углов крена γ сигналы датчиков 2 примут вид:
Для определения азимута платформы умножим амплитуды сигналов Ui на коэффициенты:
- в системе (1) на 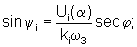
- в системе (2) на 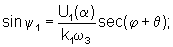
 соответственно;
соответственно;
- в системе (3) на 
 соответственно.
соответственно.
Полагая в первом приближении величины дрейфов нулевых сигналов датчиков одинаковыми, получаем сдвиг единой кривой гармонической функции сигнала в вертикальном направлении. Вычитая модули максимального и минимального значений сигнала, получаем величину нулевого дрейфа датчиков, которая может быть учтена при обработке сигналов датчиков во втором приближении.
Азимут платформы равен ψmax(αр)=ψ1(αn)+ψ2(αn)+ψ3(αn)
В предложенном способе по сравнению с прототипом повышается точность определения направления истинного меридиана при технологичной и надежной схеме устройства.
Источники информации
1. Dyott R.B., Alien D.E. A fiber optic gyroscope north finder tenth Jut J Conf. On Optical Fiber Sensors, Vol.2360, SRIE, Glasgow, 11-13 Oct. 1994 - p.442-448.
2. A.c. SU 13293227, МПК G 01 С 19/64, Способ определения угловых перемещений объекта лазерным гироскопом // Ефимов Б.В., Поляковский Е.Ф. - 1996. - БИ №16.
3. Патент Японии JP 7294258, МПК G 01 C 19/00. Устройство для определения направления на север.
4. Руководство по эксплуатации СКГР 02.07.000РЭ ЗАО "Исток".
5. Патент RU 2115889, МПК G 01 С 19/38, 19/64, Способ определения направления истинного меридиана и волоконно-оптический гирокомпас, реализующий способ // Матисов И.А., Николаев И.А., Стригалев В.Е. - 1998.
Изобретение относится к определению направления истинного меридиана объектов на Земле для навигационных или топографических целей. Сущность изобретения: на платформе устанавливают n+1 датчиков угловой скорости (n=1, 2, 3...), оси чувствительности которых расположены или в плоскости платформы, или по конусу под углом 45° к плоскости платформы, располагая их под углом 360°/(n+1) друг к другу, и осуществляют колебательное движение на угол ±(360/(n+1))+Δ (Δ - значение угла перекрытия) с постоянной угловой скоростью больше угловой скорости транспорта в пределах 360/(n+1), определяют зависимость горизонтальной составляющей угловой скорости Земли от угла поворота платформы, находят максимум и минимум и вычисляют соответствующий им угол азимута. При произвольном расположении платформы относительно плоскости горизонта измеряют углы крена и тангажа оси чувствительности одного из датчиков угловой скорости и вычисляют угол азимута с учетом изменения проекций угловой скорости вращения Земли. Техническим результатом является уменьшение времени определения и повышение точности. 1 з.п. ф-лы, 3 ил.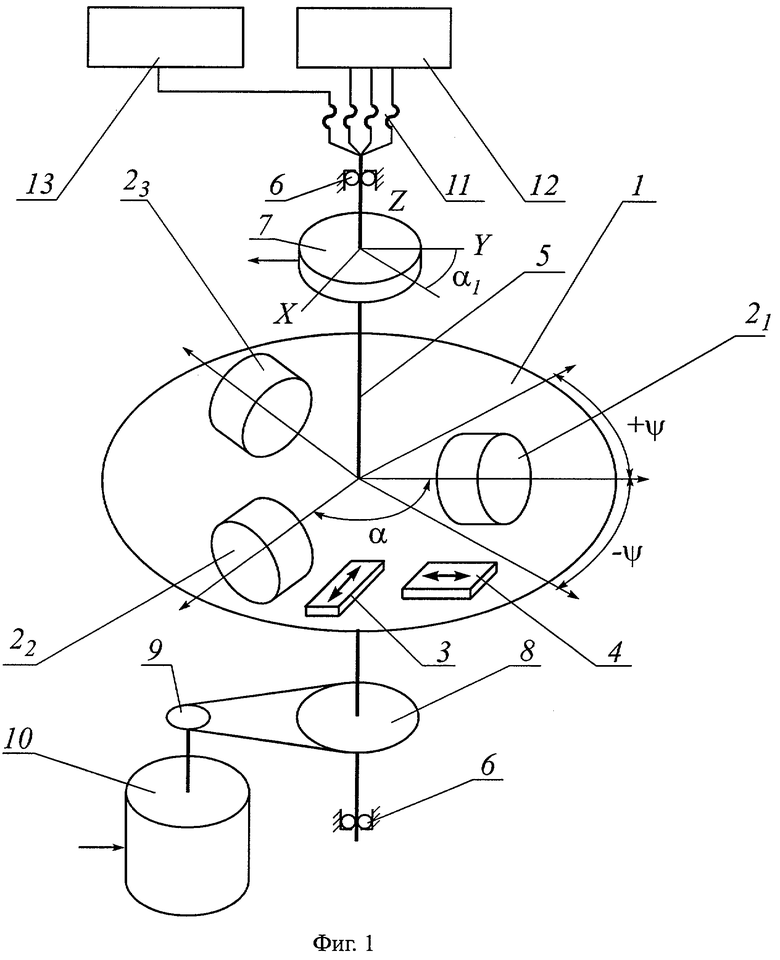
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ИСТИННОГО МЕРИДИАНА И ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОКОМПАС, РЕАЛИЗУЮЩИЙ СПОСОБ | 1996 |
|
RU2115889C1 |
| JP 7294258 А, 10.11.1995 | |||
| SU 1329327 А1, 10.06.1996 | |||
| JP 9138128 A, 27.05.1997 | |||
| JP 9126782 А, 16.05.1997. | |||

