Изобретение относится к области гироскопических приборов и предназначено для определения угла азимута.
Известны способы определения азимутального направления с использованием датчика угловой скорости (ДУС), в качестве которого используется волоконно-оптический гироскоп, выходной сигнал которого пропорционален проекции угловой скорости вращения Земли на его ось чувствительности [Dyott R.В. Allen D.E. A fiber optic gyroscope north finder. // Proc. of 10th Optical fiber sensors conf. Glasgow, Scotland, 11-13 nov., 1994-pp. 442]. Для определения азимута ДУС устанавливают таким образом, что его ось чувствительности лежит в плоскости горизонта. Затем ДУС последовательно поворачивают на фиксированные углы вокруг оси, перпендикулярной плоскости горизонта таким образом, что его ось чувствительности остается в плоскости горизонта. Первое измерение U1 производят до поворота ДУС, второе измерение U2 производят после поворота ДУС на угол, равный 90° относительно первого положения, третье измерение U3 проводят после поворота ДУС на угол, равный 90° относительно первого положения в сторону противоположную первому повороту. По полученным измерениям определяют азимут ϕ по формулам:
В способе, описанном в [Tanaka Т., Igarashi Y. Nara М Automatic north sensor using a fiber-optic gyroscope // Applied optics, Vol. 33 No. 1, jan. 1994, pp. 120-123] осуществляют не три, a 24 измерения выходного сигнала ДУС. Первое измерение проводят в исходном положении, каждое последующее - после поворота относительно предыдущего на 15°. Все повороты осуществляются в одну и ту же сторону. Полученные 24 значения выходного сигнала ДУС используют для определения азимута, например, аппроксимируя полученную зависимость выходного сигнала ДУС синусоидальной кривой по методу наименьших квадратов. Недостатком указанных способов является сложность точного поворота на заданный угол, что приводит к неполной компенсации смещения нуля ДУС. Кроме того, отклонение оси поворота ДУС от местной вертикали также приводит к появлению погрешностей.
Устройство содержит высокочувствительный ДУС, установленный на поворотной платформе так, что его ось чувствительности находится в плоскости горизонта, при этом платформа расположена так, что ее ось вращения перпендикулярна плоскости горизонта, двигатель, управляемый блоком обработки и индикации, к входу которого подключен выход ДУС и датчик угла поворота платформы. Недостатком такого устройства является невысокая точность определения угла азимута, так как угол поворота платформы должен контролироваться с погрешностью, меньшей, чем требуемая погрешность определения угла азимута. Кроме того, это предъявляет очень высокие требования к системе управления позиционированием поворотной платформы.
Известен способ определения направления истинного меридиана и волоконно-оптический гироскоп, реализующий способ [Патент на изобретение RU 2115889 С1, МПК G01C 19/38, G01C 19/64, опубл. 20.07.1998], в котором ДУС устанавливают так, что его ось чувствительности лежит в плоскости горизонта. Осуществляют поворот ДУС вокруг оси, перпендикулярной плоскости горизонта, так, что его ось чувствительности остается в плоскости горизонта, производят измерение выходного сигнала ДУС, и определяют азимут. Поворот ДУС осуществляют с постоянной угловой скоростью, а измерение выходного сигнала ДУС производят путем его фазового детектирования на частоте вращения, определяя при этом фазу выходного сигнала ДУС, соответствующую азимуту. Фазовое детектирование производят путем квадратурной обработки с использованием двух управляющих сигналов, частоты которых равны частоте вращения и имеют фазовый сдвиг относительно друг друга 90°.
Описанный в изобретении волоконно-оптический гирокомпас содержит волоконно-оптический ДУС, установленный с возможностью его поворота вокруг оси, перпендикулярной плоскости горизонта так, что его вектор чувствительности находится в плоскости горизонта, аналого-цифровой преобразователь, связанный с блоком обработки и индикации, устройство вращения, связанное с ДУС, блок фазовой обработки сигнала ДУС, блок формирования сигнала частоты и фазы вращения ДУС и датчик вращения ДУС, при этом выход ДУС соединен со входом блока фазовой обработки сигнала ДУС, вход управления которого соединен с выходом блока формирования частоты и фазы вращения ДУС, вход которого соединен с выходом датчика вращения ДУС, вход которого связан с устройством вращения, а выход блока фазовой обработки сигнала ДУС подключен ко входу аналого-цифрового преобразователя.
Существенным недостатком способа и устройства его реализующего является невысокая точность определения угла азимута, что обусловлено необходимостью с высокой точностью поддерживать постоянную угловую скорость и необходимостью точного формирования фазы опорных сигналов относительно положения оси чувствительности ДУС, сложностью обеспечения устойчивой работы замкнутого контура управления частотой и фазой вращения поворотной платформы, а также сложностью временного согласования измерений фазы вращения ДУС и измерений датчика угла положения платформы.
Задачей изобретения является повышение точности определения угла азимута путем обеспечения высокой точности разворота платформы на 180° и сокращение времени определения угла азимута путем быстрого перевода платформы между двумя положениями, отличающимися на 180°.
Техническим результатом изобретения является повышение точности определения угла азимута и уменьшение времени измерения.
Технический результат достигается за счет того, что в гирокомпасе, содержащем основание, расположенное в горизонтальной плоскости, датчик угловой скорости, жестко закрепленный на вращающейся вокруг вертикальной оси платформе таким образом, что ось чувствительности ДУС лежит в плоскости горизонта, первый двигатель, обеспечивающий поворот платформы вокруг ее оси вращения, датчик угла поворота платформы, на платформе выполнены упоры в виде выступов, расположенных по хорде платформы, и дополнительно введены:
- ограничитель поворота платформы, выполненный в виде диска, вращающегося соосно с платформой, с выступом на одной из его сторон, причем выступ на ограничителе поворота платформы выполнен с возможностью контакта с упором в виде выступа на платформе для ограничения поворота платформы относительно ограничителя поворота в пределах угла 180°;
- второй двигатель, обеспечивающий вращение ограничителя поворота;
- первое стопорное устройство, обеспечивающее фиксацию ограничителя поворота в произвольном положении относительно основания;
- второе стопорное устройство, обеспечивающее фиксацию платформы относительно ограничителя поворота в положении на упоре;
- первый концевой датчик для фиксации положения, когда выступ платформы находится в контакте с одной стороной выступа на ограничителе поворота;
- второй концевой датчик для фиксации положения, когда выступ платформы находится в контакте с противоположной стороной выступа на ограничителе поворота;
- блок управления и индикации.
Первый вход блока управления и индикации соединен с выходом датчика угла поворота платформы, второй вход соединен с выходом датчика угловой скорости, третий вход соединен с выходом первого концевого датчика, четвертый вход соединен с выходом второго концевого датчика, первый выход блока управления и индикации соединен с первым двигателем, второй выход блока управления и индикации соединен со вторым двигателем, третий выход блока управления и индикации соединен с первым стопорным устройством, четвертый выход блока управления и индикации соединен со вторым стопорным устройством.
В частном случае исполнения упоры в виде выступов, расположенных по хорде платформы, могут быть выполнены в виде электромагнитов и вставок из ферромагнитного материала.
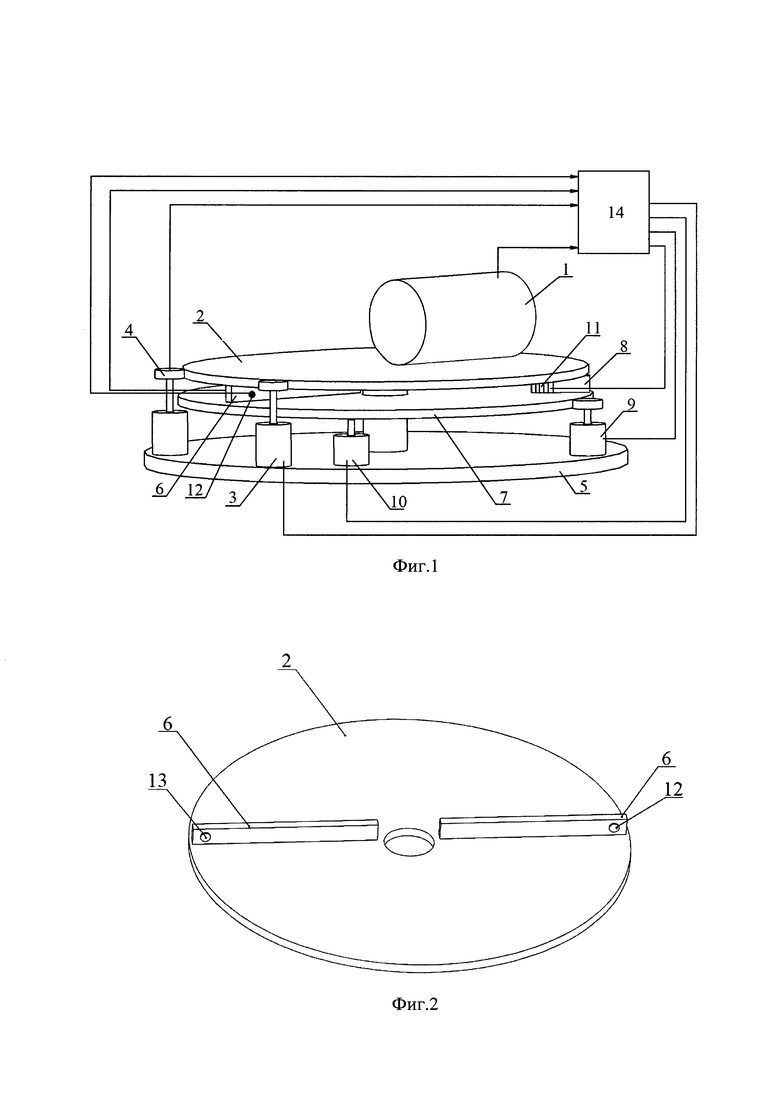
Сущность изобретения иллюстрируется фиг. 1, на которой представлена схема гирокомпаса, и фиг. 2, на которой представлена схема платформы.
На фиг. 1 и фиг. 2 обозначено:
1 - датчик угловой скорости;
2 - платформа;
3 - первый двигатель;
4 - датчика угла поворота платформы;
5 - основание;
6 - упоры в виде выступов;
7 - ограничитель поворота;
8 - выступ;
9 - второй двигатель;
10 - первое стопорное устройство;
11 - второе стопорное устройство;
12 - первый концевой датчик;
13 - второй концевой датчик;
14 - блок управления и индикации.
Устройство содержит основание 5, расположенное в горизонтальной плоскости, датчик угловой скорости (ДУС) 1, жестко закрепленный на вращающейся вокруг вертикальной оси платформе 2 таким образом, что ось чувствительности ДУС 1 лежит в плоскости горизонта, первый двигатель 3, обеспечивающий поворот платформы 2 вокруг ее оси вращения, датчик угла поворота платформы 4 относительно основания 5, при этом нулевой отсчет датчика угла поворота платформы 4 соответствует направлению оси чувствительности ДУС 1. На платформе 2 дополнительно выполнены упоры в виде выступов 6, расположенных по хорде платформы. В устройство дополнительно введен ограничитель поворота 7 платформы 2, выполненный в виде диска, вращающегося соосно с платформой 2, с выступом 8 на одной его стороне, причем выступ 8 на ограничителе поворота 7 выполнен таким образом, что совместно с упором в виде выступа 6 ограничивает поворот платформы 2 относительно ограничителя поворота 7 точно в пределах угла 180°. Гирокомпас дополнительно содержит второй двигатель 9, обеспечивающий вращение ограничителя поворота 7 относительно основания 5, первое стопорное устройство 10, обеспечивающее фиксацию ограничителя поворота 7 в произвольном положении относительно основания 5, второе стопорное устройство 11, обеспечивающее фиксацию платформы 2 относительно ограничителя поворота 7 в положении на упоре, выполненное, например, в виде электромагнита, расположенного в выступе ограничителя поворота и вставок из ферромагнитного материала в выступе платформы, первый концевой датчик 12, фиксирующий состояние, когда упор в виде выступа 6 платформы 2 находится в контакте с одной стороной выступа 8 на ограничителе поворота 7, и второй концевой датчик 13, фиксирующий состояние, когда упор в виде выступа 6 платформы 2 находится в контакте с противоположной стороной выступа 8 на ограничителе поворота 7. Устройство также содержит блок управления и индикации 14, первый вход которого соединен с выходом датчика угла поворота платформы 4, второй вход соединен с выходом ДУС 1, третий и четвертый входы соединены с концевыми датчиками 12 и 13, соответственно. Первый выход блока управления и индикации 14 соединен с первым двигателем 3, второй выход блока управления и индикации 14 соединен со вторым двигателем 9, третий выход блока управления и индикации 14 соединен с первым стопорным устройством 10, четвертый выход блока управления и индикации 14 соединен со вторым стопорным устройством 11.
Устройство работает следующим образом. После включения режима определения азимута блок управления и индикации 14 включает первое стопорное устройство 10, фиксирующее ограничитель поворота 7 относительно основания 5, после этого включает первый двигатель 3, в результате чего платформа 2 начинает ускоренный поворот до тех пор, пока не поступит сигнал от первого концевого датчика 12. После этого блок управления и индикации 14 выключает первый двигатель 3 и включает второе стопорное устройство 11. Далее блок управления и индикации 14 отключает первое стопорное устройство 10 и включает первый и второй двигатели 3 и 9 таким образом, чтобы выполнялось вращение с постоянной скоростью платформы 2 и ограничителя поворота 7 как единого целого, чему способствует работа второго стопорного устройства 11. В процессе вращения блок управления и индикации 14 считывает показания с датчика угла поворота платформы 4 и выполняет грубое определение направления на север по этому датчику, запоминая его показание ϕ0 в момент фиксации максимального сигнала с ДУС 1. После грубого определения направления на север блок управления и индикации 14, подает сигнал на первый и второй двигатели 3 и 9, разворачивая платформу 2 вместе со вторым стопорным устройством 11 так, чтобы текущее значение датчика угла поворота платформы 4 совпало с ранее запомненным ϕ0, в результате чего ось чувствительности ДУС 1 оказывается грубо ориентированной в направлении на север. После этого устройство управления 14 отключает первый и второй двигатели и включает первое стопорное устройство 10. В этом положении блок управления и индикации 14 проводит первое точное измерение сигнала ДУС U1. После завершения первого точного измерения второе стопорное устройство 11 выключается, включается первый двигатель 3 и осуществляется быстрый разворот платформы 2 на 180° от одного положения на втором стопорном устройстве 11 до другого. По сигналу со второго концевого датчика 13 блок управления и индикации 14 включает второе стопорное устройство 11 и проводит второе точное измерение сигнала ДУС U2. После завершения второго точного измерения блок управления и индикации 14 выключает первое стопорное устройство 10, подает сигнал на первый и второй двигатели и в соответствии с показаниями датчика угла поворота платформы 4 разворачивает платформу 2 вместе с ограничителем поворота 7 на 90°, отключает первый и второй двигатели 3 и 9 и включает первое стопорное устройство 10. В этом положении блок управления и индикации 14 проводит третье точное измерение сигнала ДУС U3. После завершения третьего точного измерения второе стопорное устройство 11 выключается, включается первый двигатель 3 и осуществляется быстрый разворот платформы 2 на 180° от одного положения на втором стопорном устройстве 11 до другого. По сигналу со второго концевого датчика 13 блок управления и индикации 14 включает второе стопорное устройство 11 и проводит четвертое точное измерение сигнала ДУС U4. По полученным измерениям блок управления и индикации 14 вычисляет точное значение угла азимута по формуле:
 .
.
Упоры в виде выступов 6 платформы 2 совместно с выступом 8 на ограничителе поворота платформы обеспечивают точный разворот платформы и, соответственно, оси чувствительности ДУС на 180° без необходимости в точном следящем приводе.
Таким образом, применение изобретения позволяет повысить точность определения угла азимута путем обеспечения высокой точности разворота платформы на 180° и сократить время определения азимута путем быстрого перевода платформы между двумя положениями, отличающимися на 180°.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2241957C1 |
| АВТОМАТИЧЕСКИЙ ГИРОКОМПАС | 2003 |
|
RU2239159C1 |
| ДВУХОСНЫЙ ПОВОРОТНЫЙ СТЕНД | 2018 |
|
RU2684419C1 |
| АНАЛИТИЧЕСКИЙ ГИРОКОМПАС ДЛЯ КВАЗИСТАТИЧЕСКИХ ИЗМЕРЕНИЙ | 2009 |
|
RU2408843C1 |
| ГИРОКОМПАС | 2007 |
|
RU2339910C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ИСТИННОГО МЕРИДИАНА НАЗЕМНОГО ТРАНСПОРТА | 2005 |
|
RU2296299C1 |
| ГИРОСКОПИЧЕСКИЙ ИЗМЕРИТЕЛЬ | 2015 |
|
RU2610389C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ИСТИННОГО МЕРИДИАНА И ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОКОМПАС, РЕАЛИЗУЮЩИЙ СПОСОБ | 1996 |
|
RU2115889C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2656263C1 |
| ГИРОКОМПАС С ВИЗУАЛЬНЫМ КАНАЛОМ | 2017 |
|
RU2650425C1 |
Изобретение относится к области навигации и предназначено для определения угла азимута. Сущность заявленного гирокомпаса состоит в том, что в его конструкцию дополнительно введены: ограничитель поворота платформы, выполненный в виде диска, вращающегося соосно с платформой, с выступом на одной его сторон, причем выступ на ограничителе поворота платформы выполнен с возможностью контакта с упором в виде выступа на платформе для ограничения поворота платформы относительно ограничителя поворота в пределах угла 180°; второй двигатель, обеспечивающий вращение ограничителя поворота; первое стопорное устройство, обеспечивающее фиксацию ограничителя поворота в произвольном положении относительно основания; второе стопорное устройство, обеспечивающее фиксацию платформы относительно ограничителя поворота в положении на упоре; первый концевой датчик для фиксации положения, когда выступ платформы находится в контакте с одной стороной выступа на ограничителе поворота; второй концевой датчик для фиксации положения, когда выступ платформы находится в контакте с противоположной стороной выступа на ограничителе поворота; блок управления и индикации. Технический результат заключается в повышении точности определения угла азимута и уменьшении времени измерения. 1 з.п. ф-лы, 2 ил.
1. Гирокомпас, содержащий основание, расположенное в горизонтальной плоскости, датчик угловой скорости, жестко закрепленный на вращающейся вокруг вертикальной оси платформе таким образом, что ось чувствительности ДУС лежит в плоскости горизонта, первый двигатель, обеспечивающий поворот платформы вокруг ее оси вращения, датчик угла поворота платформы, отличающийся тем, что на платформе выполнены упоры в виде выступов, расположенных по хорде платформы, дополнительно введены ограничитель поворота платформы, выполненный в виде диска, вращающегося соосно с платформой, с выступом на одной из его сторон, причем выступ на ограничителе поворота платформы выполнен с возможностью контакта с упором в виде выступа на платформе для ограничения поворота платформы относительно ограничителя поворота в пределах угла 180°, второй двигатель, обеспечивающий вращение ограничителя поворота, первое стопорное устройство, обеспечивающее фиксацию ограничителя поворота в произвольном положении относительно основания, второе стопорное устройство, обеспечивающее фиксацию платформы относительно ограничителя поворота в положении на упоре, первый концевой датчик для фиксации положения, когда выступ платформы находится в контакте с одной стороной выступа на ограничителе поворота, второй концевой датчик для фиксации положения, когда выступ платформы находится в контакте с противоположной стороной выступа на ограничителе поворота, блок управления и индикации, первый вход которого соединен с выходом датчика угла поворота платформы, второй вход соединен с выходом датчика угловой скорости, третий вход соединен с выходом первого концевого датчика, четвертый вход соединен с выходом второго концевого датчика, первый выход блока управления и индикации соединен с первым двигателем, второй выход блока управления и индикации соединен со вторым двигателем, третий выход блока управления и индикации соединен с первым стопорным устройством, четвертый выход блока управления и индикации соединен со вторым стопорным устройством.
2. Гирокомпас по п. 1, отличающийся тем, что упоры в виде выступов, расположенных по хорде платформы, выполнены в виде электромагнитов и вставок из ферромагнитного материала.
| ГИРОГОРИЗОНТКОМПАС | 2015 |
|
RU2610022C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ИСТИННОГО МЕРИДИАНА И ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОКОМПАС, РЕАЛИЗУЮЩИЙ СПОСОБ | 1996 |
|
RU2115889C1 |
| ГИРОГОРИЗОНТКОМПАС С ВРАЩЕНИЕМ ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО БЛОКА | 2010 |
|
RU2436046C1 |
| DE 102017113337 A1, 20.12.2018. | |||

