Изобретение относится к области измерительной техники и может быть использовано при разработке и изготовлении гироскопических приборов и систем для ориентации, навигации и топопривязки, стабилизации, наведения и прицеливания подвижных объектов и устройств наземной техники.
Известна система самоориентирующаяся гироскопическая курсокреноуказания [1], которая представляет собой курсовую гироскопическую систему на базе гироскопических чувствительных элементов, работающая в режиме выработки сигналов об изменении (приращении) углов курса (режим удержания заданного азимутального направления или режим гироазимута), крена и тангажа подвижного объекта во время его движения и стоянки (режим датчика углов наклона или режим гирогоризонта) и в режиме определения истинного азимута (режим самоориентирования или режим гирокомпаса) во время стоянки подвижного объекта.
В качестве прототипа принята система самоориентирующаяся гироскопическая курсокреноуказания [1].
Система состоит из блока азимутального и блока горизонтального, которые конструктивно образуют единый гироблок, и управляющего устройства.
Блок азимутальный представляет собой внутреннюю раму карданова подвеса, на которой установлены датчик угла курса, датчик стабилизирующего момента и гироскопический чувствительный элемент, в котором две оси чувствительности образованы двумя ортогонально размещенными датчиками угла и датчиками момента, при этом одна ось гироскопического чувствительного элемента совпадает с осью внутренней рамы карданова подвеса.
Блок горизонтальный представляет собой внутреннюю и наружную рамы карданова подвеса. На внутренней раме установлены датчик угла тангажа, датчик стабилизирующего момента, датчики наклона и гироскопический чувствительный элемент. На наружной раме расположены датчики угла крена и стабилизирующего момента. У гироскопического чувствительного элемента оси чувствительности образованы двумя ортогонально размещенными датчиками угла и датчиками момента и совпадают с осями внутренней и наружной рам карданова подвеса.
За счет работы блока горизонтального ось внутренней рамы карданова подвеса блока горизонтального стабилизируется в плоскости горизонта, а ось внутренней рамы карданова подвеса блока азимутального удерживается по направлению вертикали места, при этом внутренние рамы кардановых подвесов блока горизонтального и блока азимутального жестко связаны между собой.
За счет работы управляющего устройства и блока азимутального вектор кинетического момента чувствительного элемента блока азимутального удерживается в плоскости горизонта в фиксированном направлении относительно инерциальной системы координат (в режиме гироазимута) или в плоскости меридиана в северном направлении (в режиме гирокомпаса), при этом с датчиков угла курса, тангажа и крена снимается информация об изменениях курсового угла (или об азимуте в режиме гирокомпаса), углов продольного и поперечного наклона подвижного объекта соответственно.
Недостаток системы [1] заключается в том, что после перемещения подвижного объекта вдоль меридиана (при изменении широты местоположения подвижного объекта) из-за влияния различных возмущающих факторов (действие постоянной составляющей собственного ухода гироскопического чувствительного элемента блока азимутального относительно горизонтальной оси чувствительности, действие на гироскопический чувствительный элемент блока азимутального постоянных внешних моментов относительно вертикальной оси чувствительности: моментов трения в осях подвеса, моментов дебаланса, и других) точность определения истинного азимута Аист заданного направления снижается на абсолютную величину ΔA (1):

где Аопр - азимут, определенный системой [1], ϕ - широта местоположения подвижного объекта, р - параметры возмущающих факторов. При определенных значениях перемещения подвижного объекта, то есть при определенном приращении широты места ϕ и определенных значениях параметров р снижение точности может быть значительным, при этом определить количественно параметры р возмущающих факторов в системе [1] явным образом, то есть прямыми или косвенными измерениями, не представляется практически возможным.
Изобретение направлено на повышение точности определении истинного азимута заданного направления после перемещения подвижного объекта вдоль меридиана (при изменении широты местоположения подвижного объекта).
Это достигается тем, что в управляющее устройство системы самоориентирующейся гироскопической курсокреноуказания, содержащей блок азимутальный, состоящий из внутренней рамы карданова подвеса с датчиком угла курса, датчиком стабилизирующего момента, усилителя стабилизации и гироскопического чувствительного элемента, имеющего две измерительные оси, образованные двумя ортогонально размещенными датчиками угла и датчиками момента, причем первая измерительная ось гироскопического чувствительного элемента совпадает с осью внутренней рамы карданова подвеса, а выход датчика угла, установленного на первой измерительной оси гироскопического чувствительного элемента, через усилитель стабилизации связан с входом датчика стабилизирующего момента, блок горизонтальный, состоящий из карданова подвеса с датчиками угла тангажа и крена, датчиками стабилизирующего момента, датчиками наклона, усилителей стабилизации, усилителей коррекции и гироскопического чувствительного элемента, имеющего две измерительные оси, образованные двумя ортогонально размещенными датчиками угла и датчиками момента, причем измерительные оси гироскопического чувствительного элемента блока горизонтального совпадают с осями карданова подвеса, выходы датчиков наклона через усилители коррекции связаны с входами датчиков момента гироскопического чувствительного элемента блока горизонтального, а выходы датчиков угла гироскопического чувствительного элемента блока горизонтального через усилители стабилизации блока горизонтального связаны с входами датчиков стабилизирующего момента блока горизонтального, управляющее устройство, состоящее из усилителя привода в меридиан, коммутирующего устройства с ограничителями, преобразователя угол-код, приемопередатчика и цифрового устройства, причем выходы датчиков угла курса, тангажа и крена через преобразователь угол-код связаны с входом приемопередатчика, первый выход которого связан с первым входом коммутирующего устройства, а второй выход через цифровое устройство связан с входом датчика моментов, расположенного на второй измерительной оси гироскопического чувствительного элемента блока азимутального, а выход датчика угла, расположенного на второй измерительной оси гироскопического чувствительного элемента блока азимутального, через усилитель привода в меридиан связан со вторым входом коммутирующего устройства, первый выход которого через ограничители связан с входом датчика моментов, расположенного на первой измерительной оси гироскопического чувствительного элемента блока азимутального, а второй выход связан с входом датчика моментов, расположенного на второй измерительной оси гироскопического чувствительного элемента блока азимутального, введены компенсирующее и задающее устройства, причем вход компенсирующего устройства связан с выходом задающего устройства, а выход компенсирующего устройства связан со входом датчика моментов, расположенного на первой измерительной оси гироскопического чувствительного элемента блока азимутального.
Сущность предлагаемого изобретения поясняется с помощью чертежа, на котором представлена схема предлагаемой системы самоориентирующейся гироскопической курсокреноуказания.
Система самоориентирующаяся гироскопическая курсокреноуказания состоит из блока азимутального, блока горизонтального и управляющего устройства.
Блок азимутальный представляет собой внутреннюю раму 1 карданова подвеса, на которой установлены датчик угла курса 2, датчик стабилизирующего момента 3 и гироскопический чувствительный элемент 4, в котором две измерительные оси х и z образованы двумя ортогонально размещенными датчиками угла 5, 6 и датчиками момента 7, 8. Одна из измерительных осей гироскопического чувствительного элемента 4, ось z, совпадает с осью внутренней рамы карданова подвеса. Блок азимутальный включает в себя также усилитель стабилизации 9.
Блок горизонтальный представляет собой внутреннюю 10 и наружную 11 рамы карданова подвеса. На внутренней раме 10 установлен датчик угла тангажа 12, датчик стабилизирующего момента 13, датчики наклона 14, 15 и гироскопический чувствительный элемент 16. На наружной раме 11 установлены датчик угла крена 17 и датчик стабилизирующего момента 18. У гироскопического чувствительного элемента 16 измерительные оси х и у образованы датчиками угла 19, 20, датчиками момента 21, 22 и совпадают с осями внутренней 10 (условно - поперечной осью) и наружной 11 (условно - продольной осью) рам карданова подвеса соответственно. Блок горизонтальный включает в себя также усилители стабилизации 23, 24 и коррекции 25, 26.
В управляющее устройство, состоящее из приемопередатчика 27, преобразователя угол-код 28, цифрового устройства 29, усилителя привода в меридиан 30, коммутирующего устройства 31 с ограничителями 32, введены компенсирующее 33 и задающее 34 устройства.
Система самоориентирующаяся гироскопическая курсокреноуказания работает следующим образом.
В режиме гирогоризонта (при стоянке и движении подвижного объекта) за счет работы блока горизонтального производится горизонтирование внутренней рамы 10 карданова подвеса, при этом оси х и у гироскопического чувствительного элемента 16 блока горизонтального удерживаются в плоскости горизонта, а ось z блока азимутального удерживается в направлении местной вертикали. Горизонтирование и создание местной вертикали обеспечивается следящими системами: системой коррекции и системой стабилизации. Система коррекции реализована каналами: датчики наклона 14, 15, усилители коррекции 25, 26, датчики момента 21, 22. Система стабилизации реализована каналами: датчики угла 20, 19, усилители стабилизации 23, 24, датчики стабилизирующего момента 18, 13. С датчика угла тангажа 12 и датчика угла крена 17 снимаются сигналы об углах наклона подвижного объекта, которые через преобразователь угол-код 28 и приемопередатчик 27 передаются потребителю.
В режиме гироазимута (при стоянке и движении подвижного объекта) для удержания вектора кинетического момента гироскопического чувствительного элемента 4 блока азимутального в плоскости горизонта используется горизонтальная коррекция: сигнал с датчика угла 5, пропорциональный углу отклонения вектора кинетического момента от плоскости горизонта, через усилитель 30, коммутирующее устройство 31 и ограничители 32 поступает на датчик момента 8, который устраняет указанное отклонение. Азимутальная коррекция используется для устранения отклонения гироскопического чувствительного элемента 4 относительно оси z, совпадающей с направлением вертикали места, в инерциальном пространстве: сигнал с датчика угла 6, пропорциональный углу отклонения, через усилитель стабилизации 9 поступает на датчик стабилизирующего момента 3, который устраняет указанное отклонение. С датчика угла курса 2 снимается сигнал о курсе подвижного объекта, который через преобразователь угол-код 28 и приемопередатчик 27 передается потребителю.
В режиме гирокомпаса (при стоянке подвижного объекта) в цепь горизонтальной коррекции: датчик угла 5, усилитель 30, коммутирующее устройство 31, ограничители 32, датчик момента 8 - подключается дополнительный ограничитель (дополнительный ограничитель входит в ограничители 32, на чертеже отдельно не показан), при этом крутизна горизонтальной коррекции уменьшается и вектор кинетического момента чувствительного элемента 4 отклоняется от плоскости горизонта под действием горизонтальной составляющей угловой скорости вращения Земли на угол β (угол рассогласования), пропорциональный синусу угла α между плоскостью меридиана и плоскостью, содержащей вектор кинетического момента и вектор угловой скорости вращения Земли. Сигнал с датчика угла 5, пропорциональный углу β, через усилитель привода в меридиан 30 и коммутирующее устройство 31 поступает на датчик момента 7 гироскопического чувствительного элемента 4. Под действием развиваемого датчиком 7 момента вектор кинетического момента гироскопического чувствительного элемента 4 стремится совместиться с плоскостью меридиана и после окончания переходного процесса устанавливается в северном направлении. С датчика угла курса 2 снимается сигнал об истинном азимуте подвижного объекта, который через преобразователь угол-код 28 и приемопередатчик 27 передается потребителю.
Повышение точности определении истинного азимута заданного направления после перемещения подвижного объекта вдоль меридиана (при изменении широты местоположения подвижного объекта) достигается следующим образом. Сигнал с заданным определенным образом постоянным (не зависящим от широты местоположения подвижного объекта) уровнем с компенсирующего устройства 33 поступает на датчик момента 8 гироскопического чувствительного элемента 4. Под действием дополнительного момента, развиваемого датчиком момента 8, вектор кинетического момента гироскопического чувствительного элемента 4 стремится совместиться с плоскостью меридиана в северном направлении без отклонения Δα, значение которого равно абсолютной величине ΔА снижения точности определения истинного азимута заданного направления (1). Уровень постоянного сигнала с компенсирующего устройства 33 и, как следствие, значение дополнительного момента, развиваемого датчиком момента 8, определяются задающим устройством 34 при его настройке (отладочный режим работы системы в режиме гирокомпаса). Настройка задающего устройства 34 осуществляется таким образом, чтобы при соответствующем заданном уровне выходного сигнала, поступающего с компенсирующего устройства 33 на датчик момента 8 гироскопического чувствительного элемента 4 при приведении вектора кинетического момента гироскопического чувствительного элемента 4 в плоскость меридиана в северном направлении (штатный режим работы системы в режиме гирокомпаса) определенное системой значение азимута Аопр соответствовало значению азимута A, которое вычисляется согласно выражениям (2):

где AN и AS (AN≠AS) - значения азимута заданного направления, определенные системой при отсутствии сигнала на датчик момента 8 гироскопического чувствительного элемента 4 с компенсирующего устройства 33 при приведении вектора кинетического момента гироскопического чувствительного элемента в плоскость меридиана в северном и южном направлении соответственно. Определение значения АN соответствует штатному режиму работы системы в режиме гирокомпаса. Определение значения AS соответствует отладочному режиму работы системы в режиме гирокомпаса, при этом в цепи: датчик угла 5, усилитель привода в меридиан 30, коммутирующее устройство 31, датчик момента 7 гироскопического чувствительного элемента 4 осуществляется коммутация фаз датчика момента 7 коммутирующим устройством 31.
В качестве компенсирующего устройства могут быть использованы аналоговые или цифроаналоговые устройства с уровнем выходного сигнала в диапазоне, определяемом крутизной датчика момента гироскопического чувствительного элемента. В качестве аналогового компенсирующего устройства могут быть использованы мостовые или потенциометрические электронные устройства [2]. В качестве цифрового компенсирующего устройства могут быть использованы цифроаналоговые преобразователи (ЦАП) [3].
В качестве задающего устройства могут быть использованы устройства, регулирующие (задающие) уровень выходного сигнала с компенсирующего устройства до требуемой величины, при которой выполняется условие настройки (2). Задающее устройство может быть аналоговым при использовании аналогового компенсирующего устройства (резисторы-ограничители, потенциометры). Задающее устройство может быть цифровым при использовании цифрового компенсирующего устройства, в том числе с микропроцессорным управлением, при этом управление может осуществляться также извне системы [4].
В качестве гироскопических чувствительных элементов как блока азимутального, так и блока горизонтального могут быть использованы динамически настраиваемые гироскопы, например, гироскопы с внутренним карданом (ГВК) и другие, при этом допускается использование в одной системе гироскопических чувствительных элементов различного типа и на одной измерительной оси чувствительного элемента может быть более одного датчика момента, например, в ГВК: основной и компенсационный датчик момента. Выбор конкретного датчика для осуществления связей между элементами системы зависит от конкретного чувствительного элемента и его технических характеристик.
В качестве датчиков угла курса, крена, тангажа могут быть использованы датчики любого типа, преобразующие механический угол поворота в электрический сигнал.
Преобразователи угол-код могут быть любого типа: фазовые, амплитудные и другие, преобразующие аналоговый электрический сигнал с датчиков угла в цифровой код.
В качестве датчиков угла наклона могут быть использованы датчики различного типа, например, жидкостные маятниковые переключатели, акселерометры и другие.
Коммутирующие устройства могут быть различного типа: электромеханические (реле), электронные (на микросхемах и других радиоэлементах), при отладочном режиме работы системы - простейшие (перемычки).
В качестве ограничителей могут использоваться элементы электронного устройства или их набор (простейший пример - резисторы или их набор), позволяющие при изменении режима работы системы изменить (при переходе к режиму самоориентирования уменьшить) крутизну горизонтальной коррекции.
В качестве цифрового устройства может использоваться электронное устройство, вырабатывающее электрический сигнал, пропорциональный уходу гироскопического чувствительного элемента относительно вертикальной оси, в том числе вертикальной составляющей угловой скорости вращения Земли. Это устройство может иметь аналоговые элементы, а также иметь управление вне системы.
В качестве приемопередатчика может использоваться электронное устройство, как правило, цифровое, позволяющее осуществлять обмен информацией между системой и потребителем.
В настоящее время разработаны опытные образцы системы самоориентирующейся гироскопической курсокреноуказания, которые проходят предварительные испытания. Результаты испытаний положительны.
Литература
1. "Система самоориентирующаяся гироскопическая курсокреноуказания". Патент на изобретение РФ №2124184, приоритет от 15 декабря 1996 года.
2. "Курсовая система. Техническое описание". ПБ1.370.050 ТО, Ковров, ВНИИ «Сигнал», 1984.
3. "Материалы дополнения к эскизному проекту агрегата 15М97 (Пояснительная записка)". Ковров, ВНИИ «Сигнал», 1996.
4. "АСУНО изделия БМ-21-1 (Пояснительная записка)". АЮИЖ. 461114.073 ПЗ. Ковров, ВНИИ «Сигнал», 29 апреля 2004 года.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2207506C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2166733C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2316730C1 |
| НАЗЕМНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1999 |
|
RU2165075C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КУРСА ОБЪЕКТА И САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОУКАЗАНИЯ | 2000 |
|
RU2186338C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИСТИННОГО АЗИМУТА СИСТЕМОЙ САМООРИЕНТИРУЮЩЕЙСЯ ГИРОСКОПИЧЕСКОЙ | 2009 |
|
RU2407989C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2003 |
|
RU2258205C1 |
Изобретение относится к технике приборостроения, а именно к навигационным приборам для определения основных навигационных параметров позиционирования воздушных и наземных объектов. Технический результат - расширение функциональных возможностей. Для достижения данного результата в управляющее устройство введены компенсирующее и задающее устройства. Вход компенсирующего устройства связан с выходом задающего устройства, а выход компенсирующего устройства связан со входом датчика моментов, расположенного на первой измерительной оси гироскопического чувствительного элемента блока азимутального. 1 ил.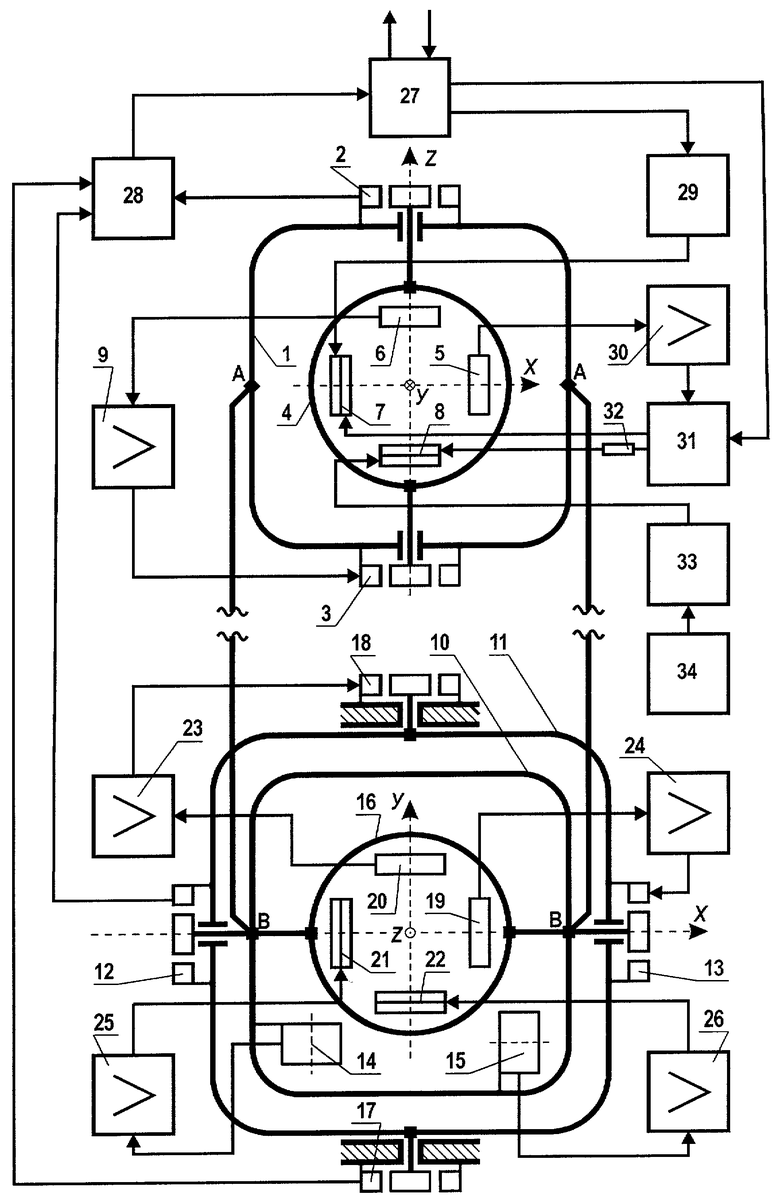
Система самоориентирующаяся гироскопическая курсокреноуказания, содержащая блок азимутальный, состоящий из внутренней рамы карданова подвеса с датчиком угла курса, датчиком стабилизирующего момента, усилителя стабилизации и гироскопического чувствительного элемента, имеющего две измерительные оси, образованные двумя ортогонально размещенными датчиками угла и датчиками момента, причем первая измерительная ось гироскопического чувствительного элемента совпадает с осью внутренней рамы карданова подвеса, а выход датчика угла, установленного на первой измерительной оси гироскопического чувствительного элемента, через усилитель стабилизации связан с входом датчика стабилизирующего момента, блок горизонтальный, состоящий из карданова подвеса с датчиками угла тангажа и крена, датчиками стабилизирующего момента, датчиками наклона, усилителей стабилизации, усилителей коррекции и гироскопического чувствительного элемента, имеющего две измерительные оси, образованные двумя ортогонально размещенными датчиками угла и датчиками момента, причем измерительные оси гироскопического чувствительного элемента блока горизонтального совпадают с осями карданова подвеса, выходы датчиков наклона через усилители коррекции связаны с входами датчиков момента гироскопического чувствительного элемента блока горизонтального, а выходы датчиков угла гироскопического чувствительного элемента блока горизонтального через усилители стабилизации блока горизонтального связаны с входами датчиков стабилизирующего момента блока горизонтального, управляющее устройство, состоящее из усилителя привода в меридиан, коммутирующего устройства с ограничителями, преобразователя угол-код, приемопередатчика и цифрового устройства, причем выходы датчиков угла курса, тангажа и крена через преобразователь угол-код связаны с входом приемопередатчика, первый выход которого связан с первым входом коммутирующего устройства, а второй выход через цифровое устройство связан с входом датчика моментов, расположенного на второй измерительной оси гироскопического чувствительного элемента блока азимутального, а выход датчика угла, расположенного на второй измерительной оси гироскопического чувствительного элемента блока азимутального через усилитель привода в меридиан связан со вторым входом коммутирующего устройства, первый выход которого через ограничители связан со входом датчика моментов, расположенного на первой измерительной оси гироскопического чувствительного элемента блока азимутального, а второй выход связан со входом датчика моментов, расположенного на второй измерительной оси гироскопического чувствительного элемента блока азимутального, отличающаяся тем, что в управляющее устройство введены компенсирующее и задающее устройства, причем вход компенсирующего устройства связан с выходом задающего устройства, а выход компенсирующего устройства связан со входом датчика моментов, расположенного на первой измерительной оси гироскопического чувствительного элемента блока азимутального.
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| Способ определения навигационных параметров | 1981 |
|
SU1098382A1 |
| US 3883812 A, 13.05.1975 | |||
| DE 19510910 A1, 28.09.1995 | |||
| Устройство для испытания изделий на случайные вибрации | 1978 |
|
SU763714A1 |
| RU 2000544 С1, 07.09.1993 | |||
| Математическое и программное обеспечение системы автономной навигации КА «Янтарь» | |||
| - М.: МО СССР, 1986 | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Кошляков В.Н | |||
| Задачи динамики твердого тела и прикладной теории гироскопов | |||
| - М.: Наука, 1985, с.236-248. | |||

