Изобретение относится к машиностроению, в частности к мобильным робототехническим комплексам поиска скрытых в грунте взрывоопасных предметов.
Известен мобильный носитель навесного оборудования (патент ФРГ N 2330143, кл. F 41 H 11/16, 1975), содержащий транспортное средство с установленным на нем рычажно-шарнирным механизмом, на котором смонтировано исполнительное навесное устройство. Носитель не имеет устройств копирования профиля грунта. Это затрудняет управление носителем, поскольку оператору приходится следить не только за направлением движения транспортного средства, но также за обеспечением необходимого для функционирования навесного устройства зазора между ним и грунтом.
Наиболее близким по технической сущности является выбранный за прототип (заявка на изобретение N 97111048/02(011495) от 10 июля 1997 г.) мобильный носитель поискового оборудования, в составе которого имеются оснащенное устройством управления транспортное средство и подвеска поискового оборудования, содержащая два продольных шарнирно соединенных с транспортным средством и соединенных каждый со своим приводом ведущих подъемных рычага, под каждым из которых установлен дополнительный продольный шарнирно соединенный с транспортным средством рычаг, каждый рычаг выполнен в виде телескопического амортизатора и снабжен датчиком столкновения с препятствием, передние концы каждого рычага шарнирно соединены каждый со своей скалкой, установленной в поперечной цилиндрической направляющей рамы, под которой установлены две лыжи, передними концами шарнирно соединенные с рамой, причем одна из скалок снабжена упорами ограничения ее осевого перемещения в направляющей, а лыжи снабжены датчиками отсчета углов их поворота в шарнирах и упорами ограничения самопроизвольного поворота в направлении поверхности грунта.
Способ управления этим носителем содержит начальную установку зазоров между поисковым оборудованием и грунтом и поддержание в заданных пределах их величин во время движения транспортного средства по поверхности грунта на основании показаний датчиков отсчета углов поворота лыж путем воздействия оператора-водителя или устройства управления носителя на приводы поворота ведущих рычагов подвески поискового оборудования с остановкой транспортного средства в случае размыкания любого из датчиков столкновения с препятствием.
Данный носитель и способ управления им имеют ограниченные технологические возможности применения для поиска взрывоопасных предметов широкозахватным поисковым оборудованием в грунтах со сложным профилем поверхности, потому что определение величин зазоров между поисковым оборудованием и поверхностью грунта и, соответственно, принятие решения о необходимости и направлении поворота рычагов осуществляются только по показаниям двух датчиков отсчета углов поворота лыж. Это может привести к принятию ошибочных решений о необходимости и направлении поворота рычагов из-за отсутствия информации о распределении величин зазоров по ширине поискового оборудования и по ходу движения транспортного средства и недостаточности информации для проверки существования положения подвески поискового оборудования, которое позволяет обеспечить необходимые для его функционирования величины зазоров. Следствиями этих решений могут быть пропуск искомых предметов из-за превышения допустимых значений величины зазоров или столкновение поискового оборудования с грунтом с последующим подрывом взрывоопасных предметов и разрушением носителя.
Изобретение решает задачу расширения технологических возможностей поиска взрывоопасных предметов широкозахватным поисковым оборудованием с помощью мобильных робототехнических комплексов в грунтах со сложным профилем поверхности.
Для решения этой задачи в мобильном носителе поискового оборудования, содержащем оснащенное устройством управления транспортное средство и подвеску поискового оборудования, содержащую два продольных шарнирно соединенных с транспортным средством и соединенных каждый со своим приводом ведущих подъемных рычага, под каждым из которых установлен дополнительный продольный шарнирно соединенный с транспортным средством рычаг, каждый рычаг выполнен в виде телескопического амортизатора и снабжен датчиком столкновения с препятствием, передние концы каждого рычага шарнирно соединены каждый со своей скалкой, установленной в поперечной цилиндрической направляющей рамы, под которой установлены две лыжи, передними концами шарнирно соединенные с рамой, причем одна из скалок снабжена упорами ограничения ее осевого перемещения в направляющей, а лыжи снабжены датчиками отсчета углов их поворота в шарнирах и упорами ограничения самопроизвольного поворота в направлении поверхности грунта, транспортное средство снабжено датчиком отсчета пройденного пути, устройство управления транспортного средства снабжено ЭВМ, под рамой установлены дополнительные, передними концами шарнирно соединенные с ней, лыжи, снабженные датчиками отсчета углов их поворота в шарнирах и упорами ограничения самопроизвольного поворота в направлении поверхности грунта, а ведущие рычаги снабжены датчиками отсчета углового положения в шарнирах их соединения с транспортным средством.
Для решения этой задачи в способе управления носителем поискового оборудования, заключающемся в том, что первоначально устанавливают зазоры между поисковым оборудованием и грунтом и поддерживают в заданных пределах их величины во время движения транспортного средства по поверхности грунта на основании показаний датчиков отсчета углов поворота лыж, при этом оператор-водитель или устройство управления носителя воздействуют на приводы поворота ведущих рычагов подвески поискового оборудования и останавливают транспортное средство в случае размыкания любого из датчиков столкновения с препятствием, при обнаружении отклонений показаний датчиков отсчета углов поворота лыж от заданных величин в ЭВМ на основании показаний каждого из этих датчиков и датчиков отсчета углового положения рычагов проводят проверку существования положения подвески поискового оборудования, позволяющего устранить эти отклонения без разрушения составных частей подвески, а также на основании показаний этих датчиков и датчика отсчета пройденного пути проводят определение длины пройденного транспортным средством отрезка пути, на котором показания любого из датчиков отсчета углов поворота лыж отклонялись от заданных величин, и в случае отсутствия такого положения или превышения заданных значений длины этого отрезка производят остановку движения рычагов и транспортного средства.
На чертеже представлена кинематическая схема, поясняющая устройство и принцип действия носителя.
В состав носителя поискового оборудования входят изображенное на кинематической схеме в виде стойки 1 транспортное средство, например мобильный робот, оснащенный датчиком отсчета пройденного пути (не показан), в качестве которого может быть использован, например, импульсный преобразователь угла поворота ходового колеса или мотор-звездочки гусеничного движителя транспортного средства в цифровой код, и устройство управления (не показано), в составе которого имеется ЭВМ (не показана). На транспортном средстве 1 размещена подвеска поискового оборудования, содержащая два установленных вдоль каждого борта транспортного средства и соединенных каждый со своим приводом, например, с электромеханизмом (не показан), ведущих подъемных рычага 2 и 3, под каждым из которых установлено по одному дополнительному ведомому рычагу 4 и 5. Рычаги 2 - 5 имеют одинаковую длину и соединены с транспортным средством цилиндрическими шарнирами 6. Ведущие рычаги 2 и 3 снабжены датчиками отсчета их углового положения в шарнирах 6, например потенциометрами (не показаны). Каждый из рычагов 2 - 5 представляет собой телескопический амортизатор, состоящий из корпуса 7, в цилиндрических направляющих 8 которого установлена штанга 9, поджатая в осевом направлении пружиной 10. Каждый из рычагов 2 - 5 снабжен датчиком, например контактным выключателем (не показан), контакты которого размыкаются при сжатии до определенного предела пружины 10. Каждая штанга 9 при помощи цилиндрического шарнира 11 соединена со своей скалкой 12, каждая из которых установлена в своей цилиндрической направляющей 13 поперечной рамы 14, причем одна из скалок 12 снабжена упорами 15 ограничения ее осевого перемещения в направляющей 13. Под рамой 14 установлены лыжи 16 и 17, которые расположены по боковым сторонам рамы 14. Между лыжами 16 и 17 расположены дополнительные лыжи 18. Количество лыж 16 - 18 и расстояния между ними определяются размерами и особенностями функционирования устанавливаемого на подвеску поискового оборудования. Передние части лыж 16 - 18 соединены с рамой 14 при помощи шарниров 19. Лыжи 16 - 18 снабжены датчиками, например потенциометрами (не показаны), отсчета углов их поворота в шарнирах 19 и упорами 20 ограничения поворота лыж в направлении поверхности грунта.
Устройство работает следующим образом. При воздействии оператора-водителя или устройства управления транспортного средства на приводы ведущих рычагов 2 и 3 они поворачиваются в шарнирах 6. При этом возникают несколько случаев взаимодействия составных частей подвески. Наиболее простым является случай, когда оба рычага 2 и 3 параллельны друг другу и под действием приводов поворачиваются в одном направлении с одинаковыми скоростями. В этом случае рычаги 2 - 5 синхронно поворачиваются на один и тот же угол, а скалки 12 поворачиваются в направляющих 13. При этом рама и установленное на ней поисковое оборудование совершает плоско-параллельное движение. Во всех остальных случаях при повороте ведущих рычагов 2 и 3 ведомые рычаги 4 и 5 поворачиваются на угол, несколько отличающийся от угла поворота рычагов 2 и 3. В процессе этого поворота происходят: поворот штанг 9 в направляющих 8, взаимный поворот штанг 9 и скалок 12 вокруг осей соединяющих их шарниров 11, поворот скалки 12, снабженной упорами 15, в направляющей 13 и поворот с одновременным поступательным перемещением остальных скалок 12 в своих направляющих 13. Кроме этого, из-за различий в углах поворотов рычагов происходит поступательное перемещение штанг 9 в направляющих 8, сопровождающееся незначительной деформацией пружин 10. При этом рама и установленное на ней поисковое оборудование совершают сложное пространственное движение, которое сопровождается изменениями высоты и углов продольного и поперечного перекоса их относительно транспортного средства. Размеры и взаимное расположение составных частей подвески выбираются таким образом, чтобы при копировании профиля грунта величины этих углов не вызывали разрушения сочленений подвески, а величина сжатия пружин 10 была незначительной и не вызывала размыкания контактов выключателей амортизаторов. В результате поворота ведущих рычагов 2 и 3 изменяются показания датчиков отсчета их углового положения в шарнирах 6 и в соответствии с изменениями величин зазоров между поисковым оборудованием и грунтом, изменяются показания датчиков отсчета углов поворота лыж 16 - 18 в шарнирах 19. Показания этих датчиков поступают в устройство управления транспортного средства и являются исходными данными о распределении величин зазоров по ширине поискового оборудования и для проверки с помощью ЭВМ существования положения подвески поискового оборудования, которое позволяет обеспечить необходимые для его функционирования величины зазоров. При столкновении поискового оборудования с препятствием происходит продольное перемещение одной или нескольких штанг 9 в направляющих 8, сжатие соответствующих пружин 10 и размыкание конечных выключателей, встроенных в эти рычаги. Размыкание выключателя происходит, если величина сжатия соответствующей пружины превысит расчетную, определяемую геометрическими параметрами подвески величину ее сжатия от взаимного перемещения составных частей подвески при копировании профиля грунта без столкновения поискового оборудования с препятствием. Информация о размыкании любого из выключателей является сигналом о необходимости остановки транспортного средства. При движении транспортного средства изменяются показания датчика отсчета пройденного пути. Эти показания поступают в устройство управления транспортного средства и используются для определения длины пройденного транспортным средством отрезка пути, на котором показания любого из датчиков отсчета углов поворота лыж 16 - 18 отклонялись от заданных величин.
Управление устройством осуществляется следующим образом. При поиске скрытых в грунте взрывоопасных предметов оператор-водитель или устройство управления транспортного средства осуществляют первоначальную установку зазоров между поисковым оборудованием и грунтом и поддерживают в заданных пределах их величины во время движения транспортного средства по поверхности грунта, при этом воздействуют на приводы поворота ведущих рычагов 2 и 3. Выбор направления и величины углов поворота рычагов 2 и 3 осуществляют на основании показаний датчиков отсчета углов поворота лыж 16 - 18 в шарнирах 19, изменяющихся в зависимости от расстояния между установленным на раме поисковым оборудованием и грунтом. В случае размыкания любого из датчиков столкновения с препятствием производят остановку движения рычагов 2 и 3 и транспортного средства. При обнаружении отклонений показаний датчиков отсчета углов поворота лыж 16 - 18 от заданных величин с помощью ЭВМ на основании показаний каждого из этих датчиков и датчиков отсчета углового положения рычагов 2 и 3 проводят проверку существования положения подвески поискового оборудования, позволяющего устранить эти отклонения, а также на основании показаний этих датчиков и датчика отсчета пройденного пути проводят определение длины пройденного транспортным средством отрезка пути, на котором показания любого из датчиков отсчета углов поворота лыж 16 - 18 отклонялись от заданных величин, и в случае отсутствия такого положения или превышения заданных значений длины этого отрезка производят остановку движения рычагов 2 и 3 и транспортного средства 1. При этом проверку с помощью ЭВМ существования положения подвески поискового оборудования, позволяющего устранить отклонения показаний датчиков отсчета углов поворота лыж 16 - 18 от заданных величин без разрушения составных частей подвески, проводят следующим образом. На основании текущих показаний датчиков отсчета углов поворота лыж для каждой i-й лыжи проверяют неравенство
где - нижний и верхний пределы расстояния от грунта до дна поискового устройства, при которых обеспечивается функционирование поискового оборудования;
- нижний и верхний пределы расстояния от грунта до дна поискового устройства, при которых обеспечивается функционирование поискового оборудования; - текущая координата
- текущая координата  точки наибольшего вылета i-й лыжи в подвижной относительно транспортного средства 1 прямоугольной системе координат
точки наибольшего вылета i-й лыжи в подвижной относительно транспортного средства 1 прямоугольной системе координат  , связанной с поисковым устройством: координатная плоскость
, связанной с поисковым устройством: координатная плоскость  совпадает с дном поискового устройства, ось
совпадает с дном поискового устройства, ось  параллельна оси поворота лыж в шарнирах 19, ось
параллельна оси поворота лыж в шарнирах 19, ось  направлена вверх от грунта; точкой наибольшего вылета i-й лыжи может быть точка ее контакта с грунтом, либо точка максимально возможного вылета для лыжи, не контактирующей с грунтом; величина
направлена вверх от грунта; точкой наибольшего вылета i-й лыжи может быть точка ее контакта с грунтом, либо точка максимально возможного вылета для лыжи, не контактирующей с грунтом; величина  представляет собой функцию угла поворота i-й лыжи;
представляет собой функцию угла поворота i-й лыжи;
N - число лыж.
Выполнение неравенства (1) означает, что величины зазоров между поисковым оборудованием и грунтом находятся в допустимых пределах. Это является признаком, по которому ЭВМ вырабатывает разрешение на начало или продолжение движения транспортного средства без изменения углов поворота ведущих рычагов. Если неравенство (1) не выполнено хотя бы для одной из лыж, то проводят проверку существования нового положения подвески поискового оборудования, позволяющего ввести величины зазоров в допустимые пределы. Проверка существования такого положения подвески состоит из двух этапов. На первом этапе проверяют существование такого положения дна поискового устройства, которое обеспечило бы выполнение неравенства (1). Для этого определяют положение плоскости, аппроксимирующей в некотором приближении, например среднеквадратичном, поверхность грунта, задаваемую показаниями датчиков отсчета углов поворота лыж. Размеры и взаимное расположение составных частей подвески таковы, что при любых допустимых углах поворота ведущих рычагов 2 и 3 плоскость, образованная верхними и нижними шарнирами 11, остается практически перпендикулярной плоскости, образованной рычагами 2 и 3 в нейтральном положении, при котором верхние и нижние шарниры 6 и 11 образуют прямоугольный параллелепипед. Поэтому в качестве плоскости, аппроксимирующей поверхность грунта в среднеквадратичном приближении, выбирают плоскость, перпендикулярную плоскости, образованной верхними и нижними шарнирами 11, и проходящую через прямую линию, уравнение которой в системе координат  имеет вид
имеет вид
где
 - координата
- координата  расположения i-й лыжи в системе координат
расположения i-й лыжи в системе координат  .
.
Для расчетов принимают, что дно поискового устройства должно быть параллельно плоскости, аппроксимирующей поверхность грунта и задаваемой прямой (2), и отстоять от нее на расстоянии P, обеспечивающем величины зазоров, необходимых для функционирования поискового оборудования. Нижнюю Pmin и верхнюю Pmax границы величины P определяют по формулам
где - максимальное возвышение точек контакта лыж с грунтом над прямой (2);
- максимальное возвышение точек контакта лыж с грунтом над прямой (2); - максимальное заглубление точек контакта лыж с грунтом под прямой (2). При вычислении величин
- максимальное заглубление точек контакта лыж с грунтом под прямой (2). При вычислении величин  учитывают только лыжи, контактирующие с грунтом.
учитывают только лыжи, контактирующие с грунтом.
В случае, если все лыжи контактируют с грунтом, выполнение неравенства
Pmin≤Pmax (3)
является критерием существования теоретического положения подвески поискового оборудования, обеспечивающего в заданных пределах  величину зазоров между грунтом и дном поискового устройства. Если же имеются лыжи, не контактирующие с грунтом, например, при начальной установке зазоров, то выполнение неравенства (3) является необходимым для продолжения проверки. В обоих случаях принимают
величину зазоров между грунтом и дном поискового устройства. Если же имеются лыжи, не контактирующие с грунтом, например, при начальной установке зазоров, то выполнение неравенства (3) является необходимым для продолжения проверки. В обоих случаях принимают
P=1/2•(Pmin+Pmax),
что завершает первый этап проверки. Невыполнение неравенства (3) во всех случаях означает, что требуемого положения подвески, обеспечивающего функционирование поискового оборудования на имеющейся поверхности грунта, не существует и ЭВМ вырабатывает запрет на движение ведущих рычагов 2 и 3 и транспортного средства 1. На втором этапе проверки определяют величины углов поворота ведущих рычагов 2 и 3, позволяющих перевести подвеску поискового устройства в требуемое положение, задаваемое параметрами  , а также проводят проверку найденных углов поворота по критериям неразрушения сочленений подвески. Положение дна поискового устройства из-за малости углов продольного перекоса подвески однозначно задают положением нижних шарниров 11, соединяющих ведомые рычаги 4 и 5 с соответствующими скалками. В прямоугольной системе координат OXYZ, связанной с транспортным средством, плоскость OXY совпадает с плоскостью ведущих рычагов в нейтральном положении, ось Z направлена вверх от грунта, координаты Z4, Z5 нижних шарниров 11 рычагов 4 и 5, обеспечивающие требуемое положение дна поискового устройства, задаваемое параметрами
, а также проводят проверку найденных углов поворота по критериям неразрушения сочленений подвески. Положение дна поискового устройства из-за малости углов продольного перекоса подвески однозначно задают положением нижних шарниров 11, соединяющих ведомые рычаги 4 и 5 с соответствующими скалками. В прямоугольной системе координат OXYZ, связанной с транспортным средством, плоскость OXY совпадает с плоскостью ведущих рычагов в нейтральном положении, ось Z направлена вверх от грунта, координаты Z4, Z5 нижних шарниров 11 рычагов 4 и 5, обеспечивающие требуемое положение дна поискового устройства, задаваемое параметрами  , выражают формулами
, выражают формулами
где
H - расстояние между шарнирами 6 ведущего и ведомого рычагов, расположенных на одном борту, например 2-го и 4-го, 3-го и 5-го;
L - расстояние между шарнирами 6 ведущих (ведомых) рычагов;
D - расстояние между шарнирами 6 и 11 ведущего рычага при отсутствии деформации пружины 10;
α2t,α3t - текущие значения углов поворота от нейтрального положения ведущих рычагов 2 и 3, считанные с датчиков отсчета углового положения рычагов 2 и 3; положительному направлению отсчета углов соответствует поворот вверх от нейтрального положения;
γt - текущее значение угла поперечного перекоса подвески, которое определяют из выражения
знак γt совпадает со знаком разности α2t-α3t .
После того, как значения координат Z4 и Z5 определены, собственно требуемые значения углов поворота α2 и α3 ведущих рычагов 2 и 3 в шарнирах 6, обеспечивающие перевод подвески в положение, задаваемое параметрами  , определяют в результате решения нелинейной системы уравнений
, определяют в результате решения нелинейной системы уравнений
Систему (5) решают одним из численных методов, например методом итераций. Далее найденные значения углов поворота α2 и α3 ведущих рычагов 2 и 3 в шарнирах 6, а также соответствующее им значение угла поперечного перекоса подвески γ , определяемое по формуле (4) с подстановкой α2 и α3 вместо текущих значений углов α2t и α3t , проверяют по критериям неразрушения сочленений подвески
где - наименьшее и наибольшее допустимое значение угла поворота ведущего рычага 2 в шарнире 6;
- наименьшее и наибольшее допустимое значение угла поворота ведущего рычага 2 в шарнире 6; - наименьшее и наибольшее допустимое значение угла поворота ведущего рычага 3 в шарнире 6;
- наименьшее и наибольшее допустимое значение угла поворота ведущего рычага 3 в шарнире 6;
γmin,γmax - наименьшее и наибольшее допустимое значение угла поперечного перекоса подвески
При выполнении всех неравенств (6) значения углов поворота α2 и α3 ведущих рычагов 2 и 3 передают соответствующим приводам для отработки. Невыполнение хотя бы одного из неравенств (6) означает, что перевести подвеску в требуемое положение без разрушения ее сочленений нельзя и ЭВМ вырабатывает запрет на движение ведущих рычагов 2 и 3 и транспортного средства 1. Кроме этого, при обнаружении отклонений показаний датчиков отсчета углов поворота лыж 16, 17 и 18 от заданных величин с помощью ЭВМ на основании показаний каждого из этих датчиков и датчика отсчета пройденного пути проводят определение длины пройденного транспортным средством отрезка пути, на котором показания любого из датчиков отсчета углов поворота лыж 16 - 18 отклонялись от заданных величин, и в случае превышения заданных значений длины этого отрезка производят остановку движения рычагов 2 и 3 и транспортного средства 1. В процессе этой проверки, если неравенство (1) выполнено для i-й лыжи, то фиксируют обновленное показание датчика отсчета пройденного пути для i-й лыжи
li=lt
где
li - показание датчика отсчета пройденного пути, соответствующее выполнению неравенства (1) для i-й лыжи;
lt - текущее показание датчика отсчета пройденного пути.
Если же неравенство (1) не выполнено для i-й лыжи, то есть зазор между дном поискового устройства и грунтом под i-й лыжей вне допустимых пределов, то присваивания (7) не производят и величина li, сохраняет свое значение, соответствующее последнему циклу считывания датчика отсчета пройденного пути, при котором неравенство (1) еще выполнялось для i-й лыжи. Вместо присваивания (7) в этом случае проверяют выполнение неравенства
где Δ - допустимая величина отрезка пути, проходимого транспортным средством, на котором угол поворота каждой i-й лыжи может отклоняться от заданных пределов. При невыполнении неравенства (8) хотя бы для одной из лыж, для которых не выполнено неравенство (1), ЭВМ вырабатывает запрет на движение ведущих рычагов 2 и 3 и транспортного средства 1.
Предложенное устройство и способ управления им позволяют расширить технологические возможности поиска взрывоопасных предметов широкозахватным поисковым оборудованием с помощью мобильных робототехнических комплексов в грунтах со сложным профилем поверхности, так как наличие дополнительных лыж позволяет получить информацию о распределении по ширине поискового оборудования зазоров между ним и грунтом, наличие датчиков отсчета углового положения ведущих рычагов подвески позволяет получить информацию о текущем взаимном положении составных частей подвески и ее положении относительно транспортного средства, наличие датчика отсчета пройденного пути позволяет получить информацию о распределении зазоров между поисковым оборудованием и грунтом по ходу движения транспортного средства, наличие ЭВМ в составе устройства управления транспортным средством позволяет на основании этих данных проводить проверку существования положения поискового оборудования, при котором обеспечиваются условия его функционирования без разрушения составных частей подвески, определение длины пройденного транспортным средством отрезка пути, на котором показания любого из датчиков отсчета углов поворота лыж отклонялись от заданных величин, и остановку движения рычагов и транспортного средства в случае отсутствия такого положения или превышения заданных значений длины этого отрезка. Вследствие этого уменьшается вероятность принятия ошибочных решений при управлении носителем, что уменьшает вероятность пропуска искомых предметов из-за нарушения условий функционирования поискового оборудования, вероятность его столкновения с грунтом и соответственно уменьшается вероятность подрыва взрывоопасного предмета и разрушения носителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ НОСИТЕЛЬ ПОИСКОВОГО ОБОРУДОВАНИЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1999 |
|
RU2168146C2 |
| ПОДВЕСКА НАВЕСНОГО ОБОРУДОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2118787C1 |
| ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ | 1997 |
|
RU2113978C1 |
| САМОХОДНОЕ ШАССИ ЧЕТЫРЕХКОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2009 |
|
RU2494908C2 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС РАЗМИНИРОВАНИЯ | 2015 |
|
RU2595097C1 |
| ШАССИ МОБИЛЬНОГО ТРАНСПОРТНОГО ОБОРУДОВАНИЯ | 2004 |
|
RU2291811C2 |
| ШТАТИВ | 1997 |
|
RU2117339C1 |
| Устройство для определения механических характеристик грунта | 1983 |
|
SU1106874A1 |
| Стенд-лаборатория для испытания автомобильных шин | 1984 |
|
SU1219954A1 |
| УСТРОЙСТВО ДЛЯ ПОИСКА СКРЫТЫХ В ГРУНТЕ ОБЪЕКТОВ | 1998 |
|
RU2135932C1 |
Изобретение относится к машиностроению, в частности к мобильным работотехническим комплексам поиска скрытых в грунте взрывоопасных предметов. Задачей изобретения является расширение технологических возможностей поиска взрывоопасных предметов в грунтах со сложным профилем поверхности. В состав мобильного носителя поискового оборудования входит оснащенное датчиком отсчета пройденного пути транспортное средство, оснащенное ЭВМ устройство его управления и шарнирно-рычажная подвеска поискового оборудования, оснащенная приводами, датчиками определения ее положения относительно транспортного средства, датчиками столкновения с препятствием и датчиками определения зазоров между поисковым оборудованием и грунтом. Способ управления носителем содержит начальную установку зазоров и поддержание в заданных пределах их величины во время движения транспортного средства путем воздействия на приводы подвески на основании показаний датчиков определения зазоров с остановкой подвески и транспортного средства при столкновении с препятствием и по результатам обработки показаний датчиков в ЭВМ. 2 с.п. ф-лы, 1 ил.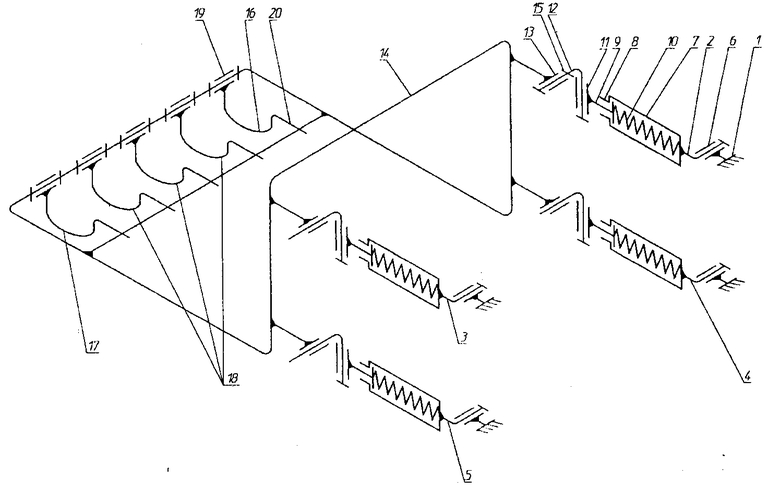
| SU, 151641 А, 18.05.63 | |||
| FR, 2700501 А1, 22.07.94 | |||
| RU, 2022813 С1, 15.01.9 4 | |||
| RU, 2068058 С1, 20.10.96 | |||
| US, 3899036 А, 12.08.75 | |||
| DE, 3138590 F1^ 14.0 4.83. |
