Изобретение относится к области машиностроения, в частности к мобильным робототехническим комплексам поиска скрытых в грунте мин и взрывоопасных предметов.
Известен мобильный носитель поискового оборудования (Патент США N 5452639 класс МКИ F 41 H 11/16, класс НКИ США 89/1.13, выдан 26 сентября 1995 г. ), содержащий транспортное средство, устройство управления и установленное на боковой стороне транспортного средства поисковое оборудование. Носитель не имеет устройств определения величины и расположения уклонов поверхности грунта на пути движения транспортного средства. Это затрудняет управление движением транспортного средства и ограничивает возможности проведения работ на грунтах со сложным профилем поверхности.
Наиболее близким по технической сущности является выбранный за прототип (Патент России N 2116608 класс МКИ F 41 H 11/16, опубликован 27 июля 1998 г. ) мобильный носитель поискового оборудования и способ управления им.
Носитель содержит оснащенное датчиками отсчета пройденного пути транспортное средство, оснащенное ЭВМ устройство управления и шарнирно-рычажную подвеску поискового оборудования, оснащенную приводами и датчиками углового положения рычагов относительно транспортного средства и амортизаторами и датчиками столкновения с препятствием. На подвеске установлены шарнирно соединенные с ней контактные датчики измерения зазоров между поисковым оборудованием и грунтом. Датчики измерения зазоров снабжены устройствами отсчета углов их поворота в шарнирах и упорами ограничения их самопроизвольного поворота в направлении поверхности грунта.
Способ управления носителем заключается в том, что первоначально устанавливают зазоры между поисковым оборудованием и грунтом, поддерживают в заданных пределах их величины во время движения транспортного средства по поверхности грунта на основании показаний датчиков измерения зазоров, при этом воздействуют на приводы подвески поискового оборудования и останавливают носитель при столкновении с препятствием или отклонении зазоров от заданных величин, когда по результатам проверки в ЭВМ отсутствует положение подвески, позволяющее устранить эти отклонения без разрушения ее составных частей, или длина пройденного транспортным средством отрезка пути, на котором показания любого из датчиков измерения зазоров отклонялись от заданных величин, превышает заданное значение.
Данное устройство и способ управления им имеют ограниченные технологические возможности поиска мин и взрывоопасных предметов на грунтах со сложным профилем поверхности. Наличие в составе носителя подвижных частей датчиков измерения зазоров между поисковым оборудованием и грунтом, упоров и деталей соединения датчиков с подвеской препятствует размещению поискового оборудования непосредственно над точками контакта датчиков с грунтом. Это не позволяет получать информацию о фактической величине зазоров под поисковыми элементами. Следствиями этого могут быть принятие ошибочных решений по управлению положением поискового оборудования, пропуск искомых предметов из-за превышения допустимых значений зазоров или столкновение поискового оборудования с грунтом с последующим подрывом взрывоопасных предметов и разрушением носителя. В устройстве и способе управления носителем отсутствуют устройства и способы определения величины и расположения уклонов поверхности грунта на пути следования транспортного средства. Это может привести к ошибкам в оценке проходимости пути, опрокидыванию или потере подвижности носителя.
Изобретение решает задачу расширения технологических возможностей работы мобильных робототехнических комплексов поиска мин и взрывоопасных предметов на грунтах со сложным профилем поверхности.
Для решения этой задачи в мобильном носителе поискового оборудования, содержащем оснащенное датчиками отсчета пройденного пути транспортное средство, оснащенное ЭВМ устройство управления и шарнирно-рычажную подвеску поискового оборудования, оснащенную приводами и датчиками углового положения рычагов относительно транспортного средства и амортизаторами и датчиками столкновения с препятствием, транспортное средство оснащено датчиками измерения углов крена и дифферента, поисковое оборудование представляет собой линейку локаторов зондирования приповерхностных слоев грунта, установленных на подвеске впереди транспортного средства с зазором от него и поверхности грунта.
Кроме этого на носителе размещено несколько линеек локаторов, установленных каждая на своей подвеске.
Кроме этого транспортное средство оснащено датчиком измерения угла отклонения от курса.
Для решения этой задачи в способе управления мобильным носителем, заключающемся в том, что первоначально устанавливают зазоры между поисковым оборудованием и грунтом и поддерживают в заданных пределах их величины во время движения транспортного средства по поверхности грунта, при этом воздействуют на приводы подвески и останавливают носитель при столкновении с препятствием или отклонении зазоров от заданных величин, когда по результатам проверки в ЭВМ отсутствует положение подвески, позволяющее устранить эти отклонения без разрушения ее составных частей, или длина пройденного транспортным средством отрезка пути, на котором показания любого из датчиков измерения зазоров отклонялись от заданных величин, превышает заданное значение, величины зазоров между поисковым оборудованием и грунтом определяют и первоначально устанавливают по результатам обработки в ЭВМ данных зондирования грунта локаторами и останавливают носитель, если крен или дифферент транспортного средства превышает заданные значения или, если по результатам проверки в ЭВМ показаний локаторов, датчиков углового положения рычагов подвески, датчика отсчета пройденного пути транспортного средства и датчиков крена и дифферента транспортного средства отсутствует возможность перемещения транспортного средства без превышения заданных значений крена и дифферента.
Кроме этого останавливают носитель, если по результатам проверки в ЭВМ показаний локаторов, датчиков углового положения рычагов подвески, датчика отсчета пройденного пути транспортного средства и датчиков крена и дифферента транспортного средства на пути следования носителя обнаружено непреодолимое пороговое препятствие.
Кроме этого останавливают носитель, если по результатам проверки в ЭВМ показаний локаторов, датчиков углового положения рычагов подвески, датчика отсчета пройденного пути транспортного средства и датчиков крена и дифферента транспортного средства отсутствует возможность перемещения транспортного средства без столкновения его корпуса с грунтом.
Кроме этого останавливают носитель, если по результатам проверки в ЭВМ показаний локаторов, датчиков углового положения рычагов подвески, датчика отсчета пройденного пути транспортного средства и датчиков крена и дифферента транспортного средства отсутствует положение подвески, позволяющее устранить отклонения от заданных величин зазоров между поисковым оборудованием и поверхностью грунта без столкновения поискового оборудования с грунтом.
Кроме этого останавливают носитель, если по результатам проверки в ЭВМ показаний локаторов и датчика отсчета пройденного пути на пути следования носителя обнаружены признаки мин и взрывоопасных предметов.
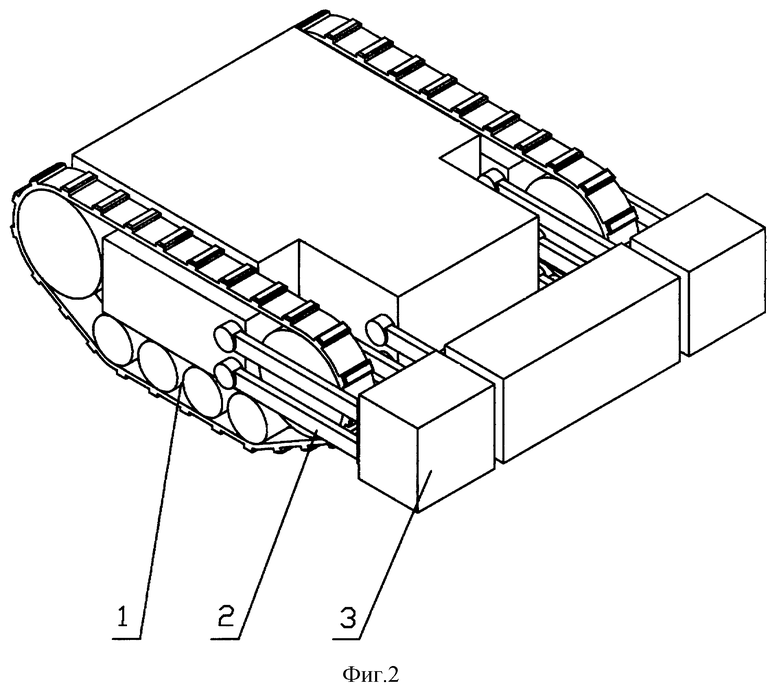
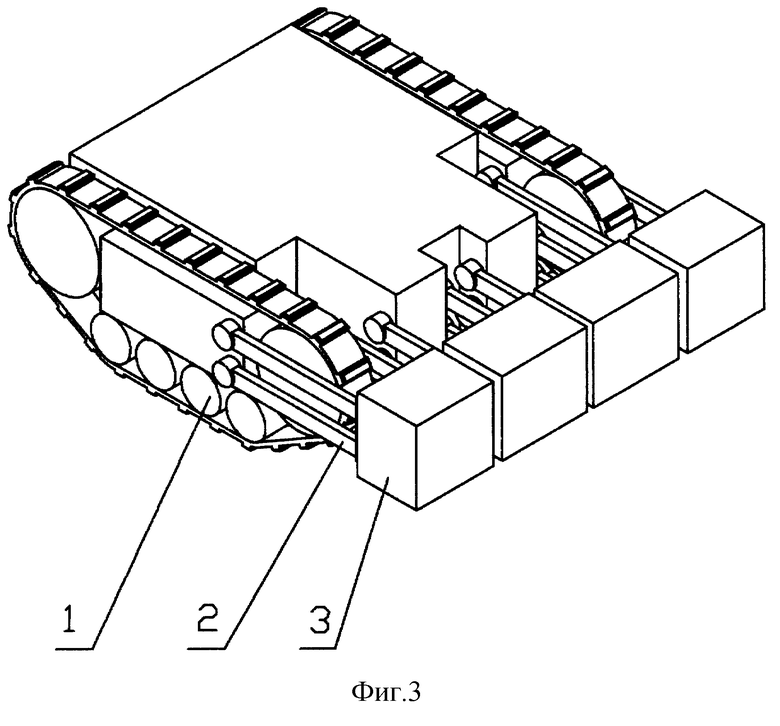
Устройство и способ управления предложенным мобильным носителем поискового оборудования поясняются на фиг. 1, 2 и 3. Фиг. 1 - внешний вид носителя, фиг. 2 и 3 - внешние виды носителя с несколькими линейками локаторов.
Мобильный носитель содержит оснащенное датчиками отсчета пройденного пути и датчиками измерения углов крена и дифферента (не показаны) транспортное средство 1, оснащенное ЭВМ устройство управления (не показано). В качестве датчиков измерения углов крена и дифферента могут быть использованы, например, акселерометры, выпускаемые НИЦ "Автоматизация", г. Киев. В носовой части транспортного средства 1 размещена шарнирно-рычажная подвеска 2 с установленным на ней поисковым оборудованием 3, которое представляет собой несколько установленных в линейку локаторов зондирования приповерхностных слоев грунта. Подвеска 2 оснащена приводами и датчиками углового положения рычагов относительно транспортного средства и амортизаторами и датчиками столкновения с препятствием (не показаны). Известный вариант устройства такой подвески приведен в выбранном за прототип патенте России N 2116608. Ее особенностью является при отсутствии столкновения с препятствием взаимно однозначное соответствие между положением рычагов и положением установленного на подвеску поискового оборудования относительно транспортного средства. В качестве локаторов поискового оборудования на носителе могут использоваться, например, радары, описание устройства и принципа действия которых приведено в проспекте "Подповерхностные радары для обнаружения объектов и неразрушающего контроля" предприятия НТП "Тензор", г. Н.-Новгород, Россия. Возможным вариантом является также использование ультразвуковых локаторов. Локаторы установлены впереди транспортного средства 1 с зазором от него и поверхности грунта. Величина зазора между ними и транспортным средством 1 выбирается по конструктивным соображениям и, по крайней мере, должна быть не меньше допустимой величины сжатия амортизаторов подвески 2. Величины зазоров между локаторами 3 и грунтом выбираются в зависимости от параметров используемых локаторов и условий их применения, в частности длины волны, мощности, длительности и периода следования зондирующих импульсов, чувствительности и быстродействия аппаратуры локаторов и скорости распространения, интенсивности поглощения и отражения волн в зондируемой области. Количество устанавливаемых в линейку локаторов и расстояния между ними выбираются в зависимости от их размеров и размеров транспортного средства с таким расчетом, чтобы ширина полосы сплошного зондирования грунта на пути следования носителя была, по крайней мере, не меньше ширины опорной поверхности транспортного средства.
Кроме этого на носителе может быть размещено несколько линеек локаторов, установленных каждая на своей подвеске. Варианты размещения дополнительных локаторов приведены на фиг. 2 и 3. Возможным вариантом является также размещение дополнительных локаторов на подвеске, в том числе в задней части транспортного средства.
Кроме этого транспортное средство носителя может быть дополнительно оснащено датчиком измерения угла отклонения от курса (не показан). В этом случае этот датчик и датчики измерения углов крена и дифферента могут быть реализованы в виде одного устройства типа трехосного гироскопа.
Устройство работает следующим образом. При воздействии оператора-водителя или устройства управления на приводы подвески изменяется ее положение и положение установленного на нее поискового оборудования относительно транспортного средства и поверхности грунта. Соответствующим образом изменяются показания датчиков углового положения рычагов подвески относительно транспортного средства и величины зазоров между поверхностью грунта и каждым из локаторов. Показания датчиков положения рычагов поступают в устройство управления транспортного средства и используются для расчета в ЭВМ высоты и углов поперечного перекоса подвески и установленного на нее поискового оборудования относительно транспортного средства. Локаторы поочередно по команде устройства управления излучают зондирующие импульсы волн в расположенную непосредственно под ними область пространства, принимают волны, отраженные от расположенных в ее пределах неоднородностей их распространения. При этом фиксируют интервалы времени между излучением очередного импульса и приемом отраженных сигналов, а также их амплитуды. Величина интервала времени между излучением очередного импульса и приемом первого сигнала, отраженного от первой расположенной на пути распространения волн неоднородности, которой в зависимости от типа локатора и условий его применения является граница воздух-грунт или вода-грунт, используют для определения расчетом в ЭВМ мгновенных значений величин зазоров между поверхностью грунта и каждым локатором. Эти величины и показания датчиков положения рычагов подвески используют для проверки с помощью ЭВМ существования положения подвески, которое позволяет обеспечить необходимые для функционирования локаторов величины зазоров, и, если такое положение существует, для определения направления и величины поворота рычагов подвески. Они же вместе с показаниями датчиков крена, дифферента и датчика пути являются исходными данными для определения величин и распределения уклонов поверхности грунта по ширине и длине носителя. Полученные значения используют для проверки в ЭВМ возможности перемещения носителя без превышения заданных значений крена и дифферента транспортного средства. Показания датчика пути используют также для определения длины отрезка, на котором значения зазоров отклоняются от заданных величин. Показания датчиков крена и дифферента используют в расчетах ЭВМ и в качестве сигнала на остановку носителя, если их значения превышают заданную величину. Показания датчиков столкновения с препятствием используют в качестве сигнала на остановку носителя, в случае его столкновения с препятствием.
Кроме этого, данные о величинах и распределении уклонов поверхности грунта используют для проверки в ЭВМ возможности перемещения носителя без столкновения корпуса транспортного средства с грунтом и для проверки возможности преодоления пороговых препятствий.
Кроме этого, в случае установки на носитель датчика измерения угла отклонения от курса, его показания используют как дополнительные данные для определения величины и распределения уклонов поверхности грунта на заданном маршруте движения носителя.
Кроме этого данные о величине зазоров, о положении рычагов подвески и данные о распределении и величинах уклонов поверхности грунта используют для проверки в ЭВМ существования положения подвески, позволяющего устранить отклонения зазоров от заданных величин без столкновения поискового оборудования с грунтом.
Кроме этого данные, полученные при обработке показаний локаторов, используют для проверки в ЭВМ наличия признаков взрывоопасных предметов.
Управление носителем осуществляют следующим образом. При поиске скрытых в грунте мин и взрывоопасных предметов оператор-водитель или устройство управления транспортного средства осуществляют первоначальную установку зазоров между поисковым оборудованием и грунтом и поддерживают в заданных пределах их величины во время движения транспортного средства по поверхности грунта. При этом воздействуют на приводы поворота рычагов подвески, сближая с грунтом и удаляя от него установленное на подвеске поисковое оборудование. Величины зазоров между поисковым оборудованием и грунтом первоначально устанавливают и определяют по результатам обработки в ЭВМ данных зондирования грунта локаторами. Первоначальную установку допустимых значений зазоров осуществляют следующим образом. В начале очередного сеанса работы на относительно ровной и типичной для текущих условий применения носителя по геологическому сложению, влажности грунта и т.д. площадке, устанавливают наибольшую допустимую величину зазора. Ее определяют, например, как значение, при котором качество сигналов, полученных от заглубленных в грунт искомых объектов или их имитаторов, удовлетворяет условиям проведения поисковых работ. При этом и в дальнейшем мгновенное значение величины зазора между каждым локатором поискового оборудования и поверхностью грунта определяют как половину произведения величины интервала времени между излучением очередного импульса и приемом его первого отраженного сигнала на значение скорости распространения излучаемых волн в воздухе или в воде, в зависимости от условий применения носителя. После установки максимально допустимого значения зазоров сравнением амплитуд первых отраженных сигналов выявляют наличие в промежутке от максимального зазора до грунта зон возникновения резонанса сигналов и устанавливают как недопустимые для работы локаторов значения соответствующих им зазоров. Затем, при неподвижном транспортном средстве и в процессе его движения, воздействуя на приводы рычагов подвески, устанавливают и поддерживают величины зазоров в пределах заданных значений. В случае обнаружения отклонений зазоров от заданных значений, выбор направления и углов поворота рычагов, необходимых для устранения отклонений зазоров от заданных величин, осуществляют по результатам расчета в ЭВМ с использованием, например, известных зависимостей, приведенных в выбранном за прототип патенте России N 2116608. При этом останавливают носитель при столкновении с препятствием и когда по результатам проверки в ЭВМ отсутствует положение подвески, позволяющее устранить отклонения зазоров от заданных величин без разрушения составных частей подвески, или длина пройденного транспортным средством отрезка пути, на котором значения зазоров под любым из локаторов отклонялись от заданных величин, превышает заданное значение. Эту проверку выполняют с использованием, например, известных зависимостей, приведенных в выбранном за прототип патенте России N 2116608. Носитель останавливают и в том случае, если крен или дифферент транспортного средства превышает заданные значения, выбранные, например, из условий обеспечения устойчивости транспортного средства на уклоне. Носитель также останавливают, если отсутствует возможность перемещения транспортного средства без превышения заданных значений крена и дифферента. Проверку возможности перемещения транспортного средства без превышения заданных значений крена и дифферента проводят расчетом в ЭВМ. В расчетах поисковое оборудование 3, состоящее из линейки локаторов, представляют в виде жесткого прямоугольного параллелепипеда, соединенного посредством шарнирно рычажной подвески 2 с транспортным средством 1, и используют следующие прямоугольные правые системы координат:
OXYZ - собственная система транспортного средства 1, жестко связанная с ним, плоскость OXY совпадает с касательной плоскостью опорной поверхности транспортного средства, ось OX направлена вперед по ходу, ось OY - в сторону левого борта транспортного средства, ось OZ - вверх, начало координат O совпадает с проекцией центра тяжести транспортного средства на плоскость OXY;
"OXYZ" - движущаяся вместе с транспортным средством 1 и связанная с ним только в точке начала координат "O", которая совпадает с началом координат O системы OXYZ, плоскость "OXY" горизонтальна, направление оси "OX" соответствует направлению, принятому за начало отсчета угла курса, ось "OZ" направлена вертикально вверх, в точке "O" допустим поворот транспортного средства относительно системы "OXYZ"; подвижная относительно транспортного средства и жестко связанная с параллелепипедом поискового оборудования 3, плоскость
подвижная относительно транспортного средства и жестко связанная с параллелепипедом поискового оборудования 3, плоскость  совпадает с днищем параллелепипеда, которое является уровнем отсчета зазора между каждым из локаторов поискового оборудования и грунтом, ось
совпадает с днищем параллелепипеда, которое является уровнем отсчета зазора между каждым из локаторов поискового оборудования и грунтом, ось  совпадает с осью линейки локаторов и направлена в сторону левого борта, ось
совпадает с осью линейки локаторов и направлена в сторону левого борта, ось  направлена вперед по ходу транспортного средства, ось
направлена вперед по ходу транспортного средства, ось  направлена вверх, начало координат
направлена вверх, начало координат  совпадает с центром линейки локаторов.
совпадает с центром линейки локаторов.
Угол крена Φ, измеряемый датчиком крена, представляет собой угол между осью OY и ее проекцией на плоскость "OXY".
Угол дифферента θ, измеряемый датчиком дифферента, представляет собой угол между осью OX и ее проекцией на плоскость "OXY".
Угол курса ψ, измеряемый датчиком угла курса, если он установлен, представляет собой угол между проекцией оси OX на плоскость "OXY" и осью "OX".
В системе координат  столбец координат точки грунта Pj, соответствующей показанию j-го локатора линейки, имеет вид:
столбец координат точки грунта Pj, соответствующей показанию j-го локатора линейки, имеет вид:
где  координата
координата  расположения j-го локатора в линейке;
расположения j-го локатора в линейке;
hj - измеренная j-м локатором линейки величина зазора между локатором и грунтом, полученная в результате расчета на ЭВМ.
В системе координат OXYZ столбец координат точки грунта Pj вычисляют по формуле:
где B = B ( α1,α2,...αk, G) - матрица размерностью (3 х 3), выражающая поворот системы координат  относительно системы координат OXYZ при изменении положения параллелепипеда поискового оборудования относительно транспортного средства;
относительно системы координат OXYZ при изменении положения параллелепипеда поискового оборудования относительно транспортного средства;
* - знак умножения матрицы на столбец
столбец координат точки  начала системы
начала системы  в системе OXYZ, выражающий изменение положения точки
в системе OXYZ, выражающий изменение положения точки  при изменении положения параллелепипеда поискового оборудования относительно транспортного средства.
при изменении положения параллелепипеда поискового оборудования относительно транспортного средства.
Параметры α1,α2,...αk, k≅6 определяют положение рычагов подвески относительно транспортного средства. Эти параметры изменяются при воздействии на приводы поворота рычагов подвески, а величина их известна из показаний датчиков положения рычагов. G - комплекс геометрических параметров, определяемых конструкцией подвески (длины рычагов, расстояние между шарнирами и т.д.).
Конкретный вид матрицы B и функций Xо,Yо,Zо определяется конструктивными особенностями подвески. Например, для устройства, выбранного за прототип, матрица В и столбец координат точки  имеют вид:
имеют вид:
D - длина рычагов;
L - расстояние между точками шарнирного соединения ведущих (ведомых) рычагов с транспортным средством;
α1,α2 - углы поворота ведущих рычагов относительно положения, выбранного за нулевое.
Два последовательных положения транспортного средства i и i + 1 соответствуют двум последовательным отсчетам:
- датчика пройденного пути Si и Si+1;
- датчика угла крена Φi и Φi+1;
- датчика угла дифферента ϑi и ϑi+1;
- датчика угла курса ψi и ψi+1 (если датчик измерения угла курса установлен).
Далее обозначено: (OXYZ)i, "(OXYZ)i" - системы координат, соответственно, OXYZ и "OXYZ", в положении транспортного средства i; (OXYZ)i+1, "(OXYZ)i+1" - системы координат, соответственно, OXYZ и "OXYZ", в положении транспортного средства i+1. Там, где это несущественно, индексы в обозначении систем координат OXYZ и "OXYZ" опущены.
Перемещение транспортного средства из положения i в положение i+1 состоит из последовательно осуществляемых фаз:
- смещения вдоль мгновенной оси курса (OX)i на величину Δ Si = Si+1 - Si;
- пространственного поворота, в результате которого система координат (OXYZ)i+1 относительно системы координат "(OXYZ)i+1" занимает положение, характеризуемое углом крена Φi+1, углом дифферента ϑi+1, углом курса ψi+1 .
Столбец координат в системе (OXYZ)i+1 точки грунта Pj, соответствующей показанию j-го локатора линейки в положении i транспортного средства, вычисляют по формуле: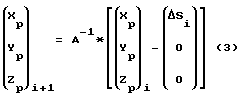
 столбцы координат точки грунта Pj, соответствующей показанию j-го локатора линейки в положении i транспортного средства, соответственно в системе координат (OXYZ)i+1; и в системе координат (OXYZ)i;
столбцы координат точки грунта Pj, соответствующей показанию j-го локатора линейки в положении i транспортного средства, соответственно в системе координат (OXYZ)i+1; и в системе координат (OXYZ)i; столбец координат точки Oi+1 - начала отсчета системы (OXYZ)i+1 - в системе координат (OXYZ)i;
столбец координат точки Oi+1 - начала отсчета системы (OXYZ)i+1 - в системе координат (OXYZ)i;
A-1 = A-1 (Φi,θi,ψi,Φi+1,θi+1,ψi+1) - матрица, обратная матрице, выражающей преобразование системы координат (OXYZ)i в систему (OXYZ)i+1 путем пространственного поворота. Матрица A-1 может быть получена как произведение двух матриц:
A-1 = C (Φi,θi,ψi)*C-1(Φi+1,θi+1,ψi+1),
где C(Φi,θi,ψi) - матрица, выражающая преобразование системы координат "(OXYZ)i" в систему координат (OXYZ)i путем последовательно осуществляемых поворота на угол курса ψi вокруг оси "(OZ)i", поворота на угол дифферента θi вокруг оси "(OX)i", поворота на угол Φ вокруг оси "(OY)i", при этом угол Φ связан с углом крена Φi и углом дифферента θi/ соотношением
SinΦ = SinΦi/Cosθi;
C-1(Φi+1,θi+1,ψi+1) - матрица, обратная матрице, выражающей преобразование системы координат "(OXYZ)i+1" в систему координат (OXYZ)i+1 путем последовательно осуществляемых поворота на угол курса ψi+1 вокруг оси "(OZ)i+1", поворота на угол дифферента θi+1 вокруг оси "(OX)i+1", поворота на угол Φ вокруг оси "(OY)i+1", при этом угол Φ связан с углом крена Φi+1 и углом дифферента θi+1 соотношением
SinΦ = SinΦi+1/Cosθi+1.
Вид матриц C и C1 общеизвестен, представлен, например, в работе (Г. Корн, Т. Корн. Справочник по математике для научных работников и инженеров. М., 1977).
Проверку проводят в три этапа. На первом этапе с началом перемещения транспортного средства осуществляют сбор и накопление информации о форме поверхности расположенного перед транспортным средством участка грунта, протяженностью, по крайней мере, не меньшей чем сумма длины опорной поверхности транспортного средства и величины зазора между поисковым оборудованием и транспортным средством. При этом транспортное средство перемещают по относительно ровному участку грунта, про который заведомо известно, что значения крена и дифферента на этом участке не превышают заданных значений. В начальной точке движения при i = 0 считывают начальное показание S0 датчика пройденного пути, показания датчиков положения рычагов относительно транспортного средства (параметры α1,α2,...αk, k≅6), датчиков углов крена Φ0 , дифферента ϑ0, курса ψ0 (если этот датчик установлен) и показания локаторов линейки поискового оборудования. Показания датчиков S0, Φ0,ϑ0,ψ0 фиксируют как текущие. На основании этих показаний в ЭВМ по формуле (1) определяют значения координат в системе  точек грунта Pj, j = 1, 2, ... N, где N - число локаторов в линейке поискового оборудования. По формуле (2) значения координат точек грунта пересчитывают в систему (OXYZ)0 и заносят в память ЭВМ в качестве нулевого слоя массива координат точек грунта. Далее, когда транспортное средство совершает перемещение S1, перейдя в положение i = 1, процесс считывания показаний датчиков и локаторов повторяют, значения координат точек грунта нулевого слоя массива координат пересчитывают по формуле (3) в систему координат (OXYZ)1 и вновь заносят на нулевой слой, координаты точек грунта Pj, j = 1, 2, ... N в положении i = 1 пересчитывают по формулам (1) и (2) в систему координат (OXYZ)1 и заносят в память ЭВМ на первый слой массива координат точек грунта, показания датчиков S1, Φ1,ϑ1,ψ1 фиксируют как текущие. Далее цикл считывания показаний датчиков и локаторов и пересчета координат повторяют для положений i = 2, 3, ... M, последовательно занимаемых транспортным средством, где M - последнее положение первого этапа. Величину M определяют из условия:
точек грунта Pj, j = 1, 2, ... N, где N - число локаторов в линейке поискового оборудования. По формуле (2) значения координат точек грунта пересчитывают в систему (OXYZ)0 и заносят в память ЭВМ в качестве нулевого слоя массива координат точек грунта. Далее, когда транспортное средство совершает перемещение S1, перейдя в положение i = 1, процесс считывания показаний датчиков и локаторов повторяют, значения координат точек грунта нулевого слоя массива координат пересчитывают по формуле (3) в систему координат (OXYZ)1 и вновь заносят на нулевой слой, координаты точек грунта Pj, j = 1, 2, ... N в положении i = 1 пересчитывают по формулам (1) и (2) в систему координат (OXYZ)1 и заносят в память ЭВМ на первый слой массива координат точек грунта, показания датчиков S1, Φ1,ϑ1,ψ1 фиксируют как текущие. Далее цикл считывания показаний датчиков и локаторов и пересчета координат повторяют для положений i = 2, 3, ... M, последовательно занимаемых транспортным средством, где M - последнее положение первого этапа. Величину M определяют из условия:
где Δψi= ψi+1-ψi;
Xg - координата X системе координат OXYZ передней границы проекции опорной поверхности шасси транспортного средства на плоскость OXY;
lx - расстояние от передней границы проекции опорной поверхности шасси транспортного средства до проекции линейки локаторов поискового оборудования на плоскость OXY при максимальном вылете подвески и отсутствии столкновения подвески с препятствием.
По окончании первого этапа в слоях 0, 1, 2, ... M массива координат будут находится координаты точек грунта, измеренные в положениях i = 0, 1, 2, . .. M транспортного средства, и пересчитанные в систему координат (OXYZ)M.
На втором этапе выполняют виртуальное перемещение транспортного средства с постоянным углом курса по расположенному перед транспортным средством участку грунта, протяженностью не менее величины зазора между поисковым оборудованием и транспортным средством. Проверку выполняют для участка грунта, соответствующего слоям массива координат m, m+1, m+2, ... M, где m - номер исходного слоя второго этапа. Величину m определяют из условия:
(Xpmax)m-1 ≅ Xg ≅ (Xpmin)m
где (Xpmax)m-1 - максимальное значение координаты X в системе координат (OXYZ)M точек грунта слоя m - 1;
(Xpmin)m - минимальное значение координаты X в системе координат (OXYZ)M точек грунта слоя m.
На первом шаге при перемещении транспортного средства по точкам грунта Pj, соответствующим слою m массива координат, используют следующие системы координат: с осями
с осями  параллельными соответствующим осям системы (OXYZ)M,
параллельными соответствующим осям системы (OXYZ)M, 
где Δ S = (Xp)mmax - Xg, (Xp)mmax - максимальное значение координаты X в системе координат (OXYZ)M точек грунта слоя m;
" " с осями "
" с осями " " параллельными соответствующим осям системы "(OXYZ)M", при этом начало координат "
" параллельными соответствующим осям системы "(OXYZ)M", при этом начало координат " " совпадает с началом координат
" совпадает с началом координат  системы
системы 
Среди точек грунта, соответствующих слоям 1, 2, ... m массива координат, определяют три точки  не лежащие на одной прямой и обладающие наибольшими значениями координат
не лежащие на одной прямой и обладающие наибольшими значениями координат  такие, что
такие, что  где
где  множество точек плоскости
множество точек плоскости  образующих проекцию опорной поверхности транспортного средства на плоскость
образующих проекцию опорной поверхности транспортного средства на плоскость  Эти три точки задают в системе координат
Эти три точки задают в системе координат  положение плоскости, которую полагают касательной плоскостью к опорной поверхности шасси транспортного средства, тем самым получая положение транспортного средства после выполнения виртуального перемещения транспортного средства на точки грунта Pj, со ответствующие слою m массива координат. Нормальное уравнение этой плоскости в системе координат
положение плоскости, которую полагают касательной плоскостью к опорной поверхности шасси транспортного средства, тем самым получая положение транспортного средства после выполнения виртуального перемещения транспортного средства на точки грунта Pj, со ответствующие слою m массива координат. Нормальное уравнение этой плоскости в системе координат  имеет вид:
имеет вид:
где p ≥ 0 - длина перпендикуляра, опущенного из начала координат  на плоскость;
на плоскость;  углы, которые образует этот перпендикуляр с осями
углы, которые образует этот перпендикуляр с осями  соответственно. Величины p,
соответственно. Величины p,  являются известными функциями координат точек
являются известными функциями координат точек  Ось OZ собственной системы координат OXYZ транспортного средства после выполнения виртуального перемещения коллинеарна перпендикуляру к плоскости, описываемой уравнением (4), и образует с осями
Ось OZ собственной системы координат OXYZ транспортного средства после выполнения виртуального перемещения коллинеарна перпендикуляру к плоскости, описываемой уравнением (4), и образует с осями  такие же углы
такие же углы  Для получения столбца направляющих косинусов оси OZ в системе координат "
Для получения столбца направляющих косинусов оси OZ в системе координат " " применяют формулу:
" применяют формулу:
где  углы, которые образует ось OZ с осями "
углы, которые образует ось OZ с осями " " соответственно; C(ΦM,θM,ψM) - матрица C, вычисленная для угла крена ΦM, угла дифферента θM, угла курса ψM, соответствующих положению i = M транспортного средства. Этот столбец направляющих косинусов оси OZ является одновременно столбцом матрицы C, выражающей преобразование системы координат "OXYZ", соответствующей положению транспортного средства после выполнения виртуального перемещения, в систему координат OXYZ путем последовательно осуществляемых поворота на угол курса ψM вокруг оси "OZ", поворота на угол дифферента θΣ вокруг оси "OX", поворота на угол Φ вокруг оси "OY". Величины углов Φ и θΣ и угла крена ΦΣ/ определяют по формулам:
" соответственно; C(ΦM,θM,ψM) - матрица C, вычисленная для угла крена ΦM, угла дифферента θM, угла курса ψM, соответствующих положению i = M транспортного средства. Этот столбец направляющих косинусов оси OZ является одновременно столбцом матрицы C, выражающей преобразование системы координат "OXYZ", соответствующей положению транспортного средства после выполнения виртуального перемещения, в систему координат OXYZ путем последовательно осуществляемых поворота на угол курса ψM вокруг оси "OZ", поворота на угол дифферента θΣ вокруг оси "OX", поворота на угол Φ вокруг оси "OY". Величины углов Φ и θΣ и угла крена ΦΣ/ определяют по формулам:

которые выражают связь коэффициентов матрицы C с тригонометрическими функциями углов крена, дифферента и курса. Определив угол Φ и угол дифферента θΣ, при фиксированном значении угла курса ψM вычисляют недостающие коэффициенты матрицы C.
Положение транспортного средства после выполнения виртуального перемещения получают как поворот с центром в точке  выражаемый матрицей C(ΦΣ,θΣ,ψM). Посредством значений углов ΦΣ и ϑΣ осуществляют проверку того, что проекция центра тяжести транспортного средства на горизонтальную плоскость "
выражаемый матрицей C(ΦΣ,θΣ,ψM). Посредством значений углов ΦΣ и ϑΣ осуществляют проверку того, что проекция центра тяжести транспортного средства на горизонтальную плоскость " " лежит внутри треугольника, образованного на горизонтальной плоскости "
" лежит внутри треугольника, образованного на горизонтальной плоскости " " проекциями точек
" проекциями точек  Если это условие не выполнено, вместо точки
Если это условие не выполнено, вместо точки  выбирают следующую подходящую точку с координатой
выбирают следующую подходящую точку с координатой  и повторяют процедуру расчета углов ΦΣ и ϑΣ до выполнения условия. Полученные в результате углы ΦΣ и ϑΣ используют для проверки возможности перемещения транспортного средства по точкам грунта Pj, соответствующим слою m массива координат, без превышения заданных значений крена и дифферента:
и повторяют процедуру расчета углов ΦΣ и ϑΣ до выполнения условия. Полученные в результате углы ΦΣ и ϑΣ используют для проверки возможности перемещения транспортного средства по точкам грунта Pj, соответствующим слою m массива координат, без превышения заданных значений крена и дифферента:
ΦΣ≅Φmax (5)
ϑΣ≅ϑmax (6)
где Φmax,ϑmax - заданные значения углов крена и дифферента.
Если условия (5) и (6) выполнены, то полученное виртуальное положение транспортного средства полагают его текущим положением с номером i = M + 1. Фиксируют в качестве текущих значения виртуального перемещения транспортного средства, его углов крена, дифферента и курса, если этот датчик установлен на носителе: Для пересчета координат точек грунта Pj, хранящихся в слоях 0, 1, 2, ... M массива координат, из системы (OXYZ)M в систему (OXYZ)M+1 используют формулу:
Для пересчета координат точек грунта Pj, хранящихся в слоях 0, 1, 2, ... M массива координат, из системы (OXYZ)M в систему (OXYZ)M+1 используют формулу: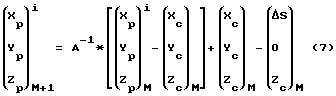
столбцы координат точки грунта Pi из i-го слоя массива координат соответственно в системе координат (OXYZ)M+1 и в системе координат (OXYZ)M, j = 1, 2, ... N, i = 0, 1, 2, ...M;
A-1= C(ΦM,θM,ψM)*C-1(ΦΣ,θΣ,ψM) столбец координат точки, являющейся центром виртуального поворота, в системе координат (OXYZ)M;
столбец координат точки, являющейся центром виртуального поворота, в системе координат (OXYZ)M; столбец координат промежуточной точки в системе координат (OXYZ)M.
столбец координат промежуточной точки в системе координат (OXYZ)M.
Далее процедуру виртуального перемещения транспортного средства и пересчета координат по формуле (7) повторяют для точек грунта, соответствующих слоям m+1, m+2, ... M массива координат, при этом транспортное средство занимает виртуальные положения i = M+2, M+3, ... 2M-m+1. При невыполнении неравенств (5) или (6) в некотором положении i < 2M-m+1 транспортного средства фиксируют отсутствие возможности преодоления участка грунта без превышения заданных углов крена или дифферента.
На третьем этапе, в процессе дальнейшего перемещения транспортного средства, выполняют проверку очередного участка грунта, протяженностью не менее величины зазора между поисковым оборудованием и транспортным средством. Третий этап проверки осуществляют, если второй этап завершен на точках грунта, соответствующих слою M массива координат, и при этом выполнены неравенства (5) и (6), что соответствует выполнению заданных условий проверки. В начале третьего этапа перезаписывают массив координат точек грунта, делая первый слой нулевым, второй - первым, и так далее, вплоть до слоя M, который становится слоем M-1. Транспортное средство совершает по проверенному на втором этапе участку грунта реальное перемещение вдоль мгновенной оси курса, при этом считывают показания датчиков пути, положения рычагов подвески относительно транспортного средства, углов крена, дифферента, курса (если этот датчик установлен), показания локаторов поискового оборудования. Осуществляют проверку считанных с датчиков значений углов крена и дифферента на отсутствие превышения заданных значений этих углов. Фиксируют как текущие полученные значения перемещения, углов крена, дифферента, курса транспортного средства. Используя формулы (1) и (2), определяют значения координат точек грунта в системе OXYZ и заносят их на слой M массива координат. Используя формулу (3), пересчитывают значения координат, содержащихся в слоях 0, 1, 2, ... M-1, в систему координат OXYZ. Далее полностью повторяют проверку второго этапа, что завершает третий этап. Далее повторяют третий этап для каждого последующего положения транспортного средства.
Носитель также останавливают, если на пути его следования обнаружено непреодолимое пороговое препятствие. Проверку наличия непреодолимого порогового препятствия на пути следования носителя выполняют, начиная со второго этапа для точек грунта Pj, соответствующих слою m, m+1, ... M массива координат. Перед выполнением виртуального перемещения на точки грунта Pj, соответствующие каждому последующему слою массива координат, проверяют неравенство:
Zp ≅ χ d, (8)
где Zp - координата Z точки грунта Pj в системе координат OXYZ, связанной с текущим (виртуальным) положением транспортного средства;
χ - коэффициент, определяемый конструкцией шасси транспортного средства;
d - характерный размер движителя шасси транспортного средства, например диаметр колеса для колесных машин, диаметр переднего катка для гусеничных машин.
Проверку неравенства (8) проводят для таких точек грунта слоя, у которых Yp ∈Φ [(Xg, Y)], где Yp - координата Y точки грунта Pj в системе координат OXYZ; Φ [(Xg,Y)] - подмножество множества Φ [(X,Y)] при X = Xg, содержащее только точки передней границы проекции опорной поверхности транспортного средства на плоскость OXY.
Носитель также останавливают, если по результатам проверки в ЭВМ отсутствует возможность его перемещения без столкновения корпуса транспортного средства с грунтом. Проверку отсутствия столкновения корпуса транспортного средства с грунтом выполняют, начиная со второго этапа для точек грунта Pj, соответствующих слою m, m+1, ...M массива координат. После выполнения виртуального перемещения на точки грунта Pj и пересчета координат точек грунта по формуле (6) в систему координат OXYZ, связанную с новым виртуальным положением транспортного средства, проверяют неравенство:
Zp ≅ Z(Xp,Yp), (9)
где Xp, Yp, Zp - соответственно координаты X, Y, Z точки грунта Pj в системе координат OXYZ;
Z = Z(X, Y) - функция, описывающая форму днища корпуса транспортного средства в системе координат OXYZ.
Проверку неравенства (9) проводят для таких точек грунта Pj слоя, у которых (Xp,Yp) ∈П [(X,Y)]
где П [(X, Y)] - множество точек, образующих проекцию корпуса транспортного средства на плоскость OXY.
Носитель также останавливают, если по результатам проверки в ЭВМ отсутствует положение подвески, позволяющее устранить отклонения от заданных величин зазоров между поисковым оборудованием и поверхностью грунта без столкновения поискового оборудования с грунтом. Проверку положения подвески, позволяющего устранить отклонения от заданных величин зазоров между поисковым оборудованием и поверхностью грунта, на отсутствие столкновения поискового оборудования с точками грунта выполняют на третьем этапе в системе координат  связанной с параллелепипедом поискового оборудования. После выполнения расчета в ЭВМ значений параметров α1,α2,...αk, k≅6, задающих требуемое положение подвески, определяют матрицу B-1, обратную матрице B, и столбец координат
связанной с параллелепипедом поискового оборудования. После выполнения расчета в ЭВМ значений параметров α1,α2,...αk, k≅6, задающих требуемое положение подвески, определяют матрицу B-1, обратную матрице B, и столбец координат
(см. формулу (2)). Выполняют пересчет столбца координат точек грунта Pj из системы координат OXYZ в систему 
где  соответственно координаты
соответственно координаты  точки грунта Pj в системе координат
точки грунта Pj в системе координат 
Для точек грунта Pj проверяют неравенство: (10)
(10)
где  функция, описывающая форму днища корпуса поискового оборудования в системе координат
функция, описывающая форму днища корпуса поискового оборудования в системе координат 
Проверку неравенства (10) проводят для таких точек грунта Pj, у которых
где  множество точек, образующих проекцию корпуса поискового оборудования на плоскость
множество точек, образующих проекцию корпуса поискового оборудования на плоскость  .
.
Носитель также останавливают, если по результатам проверки в ЭВМ обнаружены признаки мин и взрывоопасных предметов. Проверку наличия признаков мин и взрывоопасных предметов проводят, начиная с первого этапа обработкой в ЭВМ показаний локаторов зондирования приповерхностных слоев грунта и датчика отсчета пройденного пути. При этом обработкой показаний локаторов выявляют созданные минами и взрывоопасными предметами неоднородности распространения зондирующих импульсов. Описание одного из известных способов обработки данных локаторов можно найти в проспекте "Подповерхностные радары для обнаружения объектов и неразрушающего контроля" предприятия НТП "Тензор", г. Н.-Новгород, Россия. Далее сопоставлением показаний локаторов с показаниями датчика отсчета пройденного пути определяют протяженность обнаруженных неоднородностей и на основании совокупности этих данных, сравнением с базой данных, полученных ранее экспериментальным путем, принимают решение о наличии признаков мин и взрывоопасных предметов.
Предложенное устройство и способ управления им позволяют расширить технологические возможности поиска взрывоопасных предметов широкозахватным поисковым оборудованием с помощью мобильных робототехнических комплексов в грунтах со сложным профилем поверхности. Достижение этой цели обеспечивается следующим. Наличие в составе поискового оборудования локаторов зондирования приповерхностных слоев грунта и использование полученных с их помощью данных для определения обработкой в ЭВМ зазоров между ними и поверхностью грунта позволяет измерять величины зазоров бесконтактным методом непосредственно в зоне ведения поиска взрывоопасных предметов. Наличие датчиков крена и дифферента транспортного средства, в сочетании с наличием линейки локаторов и датчика пути, позволяет обработкой их показаний в ЭВМ получать информацию о распределении и величинах уклонов поверхности грунта, как по ширине, так и по пути следования носителя. Это позволяет проводить расчетом в ЭВМ проверки: возможности перемещения носителя без превышения заданных значений крена и дифферента транспортного средства и наличия положения подвески, позволяющего устранить отклонения зазоров от заданных величин без столкновения поискового оборудования с грунтом. Проведение проверок позволяет уменьшить вероятность потери устойчивости и опрокидывания носителя при работе на склонах и уменьшает вероятность подрыва взрывоопасных предметов и разрушения носителя при проведении поисковых работ.
Кроме этого установка на носителе дополнительных линеек локаторов позволит выполнять поисковые работы на грунтах со сложным профилем поверхности носителем с широким транспортным средством.
Кроме этого оснащение транспортного средства датчиком измерения угла отклонения от курса позволит точнее определить величину и распределение уклонов поверхности грунта и, следовательно, повысить качество управления носителем и надежность проведения работ на грунтах со сложным профилем поверхности.
Кроме этого дополнительно проводимые проверка в ЭВМ наличия признаков мин и взрывоопасных предметов и возможности перемещения транспортного средства без столкновения его днища с грунтом уменьшит вероятность разрушения и потери подвижности носителя при выполнении работ на грунтах со сложным профилем поверхности.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОБИЛЬНЫЙ НОСИТЕЛЬ ПОИСКОВОГО ОБОРУДОВАНИЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1997 |
|
RU2116608C1 |
| ПОДВЕСКА НАВЕСНОГО ОБОРУДОВАНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2118787C1 |
| РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС РАЗМИНИРОВАНИЯ | 2015 |
|
RU2595097C1 |
| ШАССИ МОБИЛЬНОГО ТРАНСПОРТНОГО ОБОРУДОВАНИЯ | 2004 |
|
RU2291811C2 |
| ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ | 1997 |
|
RU2113978C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И РАСПОЗНАВАНИЯ НЕОДНОРОДНОСТЕЙ В ПОВЕРХНОСТНОМ СЛОЕ ГРУНТА (ВАРИАНТЫ) И ВИБРОЩУП ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2275657C1 |
| ЛАЗЕРНОЕ УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ РЕЛЬЕФА МЕСТНОСТИ С ПОДВИЖНОГО НОСИТЕЛЯ | 1977 |
|
SU1840747A1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| БЕСПИЛОТНЫЙ МОБИЛЬНЫЙ КОМПЛЕКС | 2011 |
|
RU2583851C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТЫ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU1829578C |
Изобретение относится к области машиностроения, в частности к мобильным робототехническим комплексам для поиска скрытых в грунте мин и взрывоопасных предметов. Изобретение расширяет технологические возможности комплексов при работе на грунтах со сложным профилем поверхности. Мобильный носитель содержит датчики отсчета пройденного пути и измерения углов крена и дифферента транспортного средства, оснащенное ЭВМ устройство управления и оснащенную приводами и датчиками определения ее положения относительно транспортного средства и амортизаторами и датчиками столкновения с препятствием шарнирно-рычажную подвеску с закрепленным на ней поисковым оборудованием, представляющим собой линейку размещенных над грунтом локаторов зондирования приповерхностных слоев грунта. Способ управления носителем содержит начальную установку зазоров между поисковым оборудованием и грунтом, поддержание в заданных пределах их величины во время движения транспортного средства путем воздействия на приводы подвески и остановку носителя при столкновении с препятствием и по результатам обработки показаний датчиков в ЭВМ. 2 с. и 6 з. п. ф-лы, 3 ил.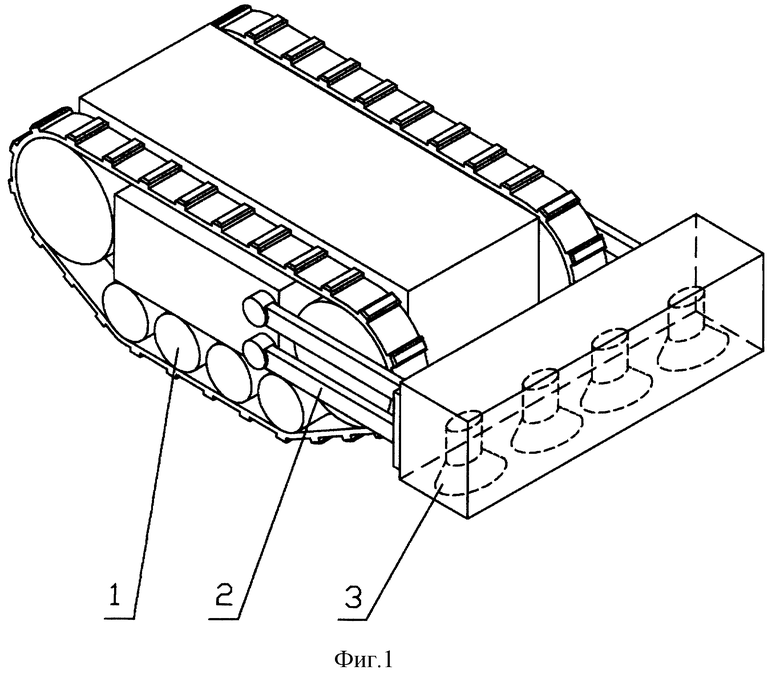
| МОБИЛЬНЫЙ НОСИТЕЛЬ ПОИСКОВОГО ОБОРУДОВАНИЯ И СПОСОБ УПРАВЛЕНИЯ ИМ | 1997 |
|
RU2116608C1 |
| US 5452639 A, 26.09.1995 | |||
| DE 19638375 А1, 26.03.1990 | |||
| DE 19514569 А1, 24.10.1996 | |||
| DE 4126381 А1, 11.02.1993 | |||
| Подмости | 1979 |
|
SU872700A1 |

