Изобретение относится к авиационной технике, например к системам нашлемного целеуказания (НЦУ), индикации (НСИ), к единой нашлемной системе целеуказания и индикации (НСЦИ), комплексирующихся с обзорно-прицельными и индикационными системами (телевизионными, тепловизионными, радиолокационными) летательных аппаратов и может найти применение при отработке на стендах, тренажерах, а также в игровых центрах коммерческого назначения, моделирующих боевую, естественно-научную или игровую обстановку.
Известен способ определения координат головы летчика вертолета с применением поляризованного света [1].
Этот способ основан на использовании излучения конусообразного луча ИК-передатчика на арсенидогеллиевом диоде с углом при вершине 70o, пропускании излучения через линейный поляризатор, размещенный на сканирующем устройстве. Сканирующее устройство и ИК-передатчик укреплены на потолке кабины вертолета. Поляризованное излучение воспринимает электронно-оптический приемник, перед которым поставлен второй поляризатор, расположенный наверху шлема летчика. Выходной электрический сигнал приемника фильтруют, усиливают и подают на фоточувствительный демодулятор, который вырабатывает сигнал ошибки, эквивалентный углу между оптическими осями передатчика и приемника. Сигнал ошибки поступает на модулятор частоты 400 Гц, модулированный сигнал усиливают и далее передают на серводвигатель. Серводвигатель изменяет положение поляризатора в сканирующем устройстве, сводя к нулю сигнал ошибки. Изменение положения поляризатора соответствует изменению положения головы (шлема) летчика.
Наиболее близким аналогом-прототипом является способ определения координат шлема (СОКШ) летчика, при котором перемещение шлема, установленного на голове летчика, осуществляет голова и плечевой отдел тела летчика [2].
Способ включает установку на боковой поверхности шлема 3-х светодиодов, причем два нижних светодиода расположены на прямой, параллельной линии визирования летчика. Свет от нашлемного светодиода проходит через узкую V-образную щель камеры, установленной в кабине летчика, и попадает на фотолинейку, расположенную внутри камеры и представляющую собой линейный светочувствительный прибор с зарядовой связью. Положение пика светового сигнала на входе фотолинейки преобразуют в электрический сигнал, эквивалентный координатам светодиодов в системе координат, связанных с камерой. Нашлемные светодиоды включают циклически один за другим, цикличность задает электрический блок. Это позволяет уверенно выделить сигналы от 1, 2 и 3-го нашлемных светодиодов на фоне всех внешних засветок V-образной щели, включая прямую солнечную засветку. Электрические сигналы поступают в вычислитель, который определяет углы ориентации шлема (азимут, угол места, крен). СОКШ обеспечивает измерения в диапазоне перемещений головы летчика: в поступательном продольном 15 см, поперечном 10 см; угловом по азимуту 180o, по углу места 70o, по крену 20o.
Известные способы определения координат шлема летчика (оператора) имеют одно общее свойство: координаты шлема летчика (или направление линии визирования летчика) определяют по относительному положению нашлемных датчиков и неподвижных излучателей, установленных в кабине летательного аппарата, или, наоборот, нашлемных излучателей и неподвижных датчиков в кабине, то есть имеет место измерение относительных координат шлема.
Таким образом, функционирование известных СОКШ ограничено требованиями нахождения шлема (головы) летчика в области действия датчика (приемника), установленного в кабине летательного аппарата. Это требование можно трактовать как общий недостаток всех известных способов определения координат шлема летчика.
Отмеченный недостаток усугубляется в случае применения СОКШ в кабинах, размеры которых превышают размеры кабины боевых самолетов, вертолетов. Например, при применении СОКШ в кабинах пассажирских самолетов, наземных, подводных испытательных, естественно-научных лабораториях, индустрии развлечений.
Сущность предлагаемого изобретения состоит в том, что в способе измерения, включающем определение положения шлема оператора относительно осей координат, устанавливают на шлеме инерциальную систему. Осуществляют выставку осей координат этой инерциальной системы в соответствии с начальным положением шлема и измеряют при перемещении оператора и (или) головы оператора абсолютные координаты шлема оператора, например, по месту установки инерциальной системы, причем за начало координат инерциальной системы принимают, например, центр масс этой системы, при этом ортогональные оси OX, OY инерциальной системы координат направляют в горизонтальной плоскости, причем OX направляют на Север, а ось OZ инерциальной системы координат ориентируют по местной вертикали.
Применением предложенного способа достигают расширения области измеряемых координат шлема оператора, устраняют зависимость области измеряемых координат от геометрии тренажерной или боевой кабины летательного аппарата.
Реализация способа применения координат шлема оператора показана на примере устройства, блок-схема которого приведена на фиг. 1, при этом на фиг. 2 и 3 показаны соответственно вид устройства сбоку и в плане; на фиг. 4 приведена схема алгоритма работы вычислительного блока ЭВМ, а на фиг. 5 показано положение фигуранта игры (аквариума как одного из примеров использования) в системе координат.
На блок-схеме примера реализации способа измерения координат шлема оператора (фиг. 1) показано:
блок 1 - инерциальная система;
блок 2 - блок выставки инерциальной системы;
блоки 3 - 10 - блоки ЭВМ, при этом
блок 3 - блок входа-выхода;
блок 4 - клавиатура;
блок 5 - командный процессор;
блок 6 - оперативное запоминающее устройство (ОЗУ);
блоки 7 и 8 - блоки постоянных запоминающих устройств (ЗУ);
блок 9 - вычислительное устройство (ВУ);
блок 10 - блок формирования звукового и (или) светового сигнала конца игры.
Блоки 11 - 14 - блоки шлема, при этом
блок 11 - усилитель;
блок 12 - светодиодная матрица;
блок 13 - оптическая призма;
блок 14 - смотровой щиток с полупрозрачным отражателем.
Приведем описание основных блоков.
Блок 1 - инерциальная система типа миниатюрной инерциальной системы (МИС) ракеты AMRAAM (см. также ОИ, 1983, N 26, стр. 4, 5 (НИЦ) представляет собой миниатюрную бесплатформенную инерциальную систему, в состав которой входят гироинерциальный блок (ГИБ), состоящий из трех датчиков угловых скоростей, трех акселерометров, микропроцессор, модуль возбуждения и модуль преобразования (не показаны). Модуль преобразования МИС обеспечивает управление датчиками ГИБ. Модуль возбуждения усиливает входные электрические сигналы, поступающие на ГИБ, и выходные электрические сигналы с ГИБ. Микропроцессор преобразует сигналы с ГИБ в электрические сигналы, эквивалентные линейным и угловым координатам шлема. Микропроцессор осуществляет также возврат измерительных приборов в исходное положение и автоконтроль работы МИС. МИС построена по принципу функционально и конструктивно интегрированной системы, что предопределяет уменьшение ее объема и массы и возможность легкого съема и установки. МИС ракеты AMRAAM имеет массу меньше 1,36 кг и объем порядка 1,5 дм3. МИС может быть установлена на алюминиевой раме, расположенной внутри шлема. МИС связана с блоком 2 выставки инерциальной системы координат и блоком 3 ввода-вывода ЭВМ.
Блок 2 - блок выставки инерциальной системы представляет собой жесткое механическое устройство с приспособлениями, позволяющими закрепить шлем и строго зафиксировать его ориентацию. Для этой операции на шлеме предусмотрены ответные фиксаторы, обеспечивающие однозначное положение шлема при любом числе повторных операций выставки. При этом вертикальная ось МИС совпадает с местной вертикалью (причем направление вертикальной оси выбирают ориентированным от оператора), а ось OX направляют на Север. Устройство выставки инерциальной системы (фиг. 2 (вид сбоку) и 3 (вид в плане) включает две металлические пластины 15 и 16, которые прикрепляют к вертикальной стенке тренажерного кресла 17 на расстоянии друг от друга, например, 25 см, при этом верхнюю плоскость детали 16 располагают на расстоянии, например, L=160 см от горизонтальной плоскости пола. Пластины 15 и 16 имеют отверстия с резьбой, одно отверстие (вертикальное) в пластине 15 и два отверстия (горизонтальные) в пластине 16. Полые винты 18 - 20, полностью ввернутые в пластины 15 и 16, фиксируют шлем (пальцы 21 - 23 шлема) в начальном положении выставки. Пальцы шлема выполнены, например, из пластика, присоединены к шлему при его изготовлении.
Блоки 3 - 10 - стандартные блоки ЭВМ.
Блок 3 - блок ввода-вывода ЭВМ.
Блок 4 - клавиатура, предназначенная для задания режимов работы, например, при использовании в игровых системах NN игры, и признака L состояния игры.
Блок 4 соединен с блоком 5, выполненным в виде командного процессора.
Блок 5 - командный процессор, соединенный с блоками 6 - 8.
Блок 6 выполнен в виде стандартного блока ЭВМ - блока загрузки и распределения оперативной памяти.
Блоки 7 и 8 выполнены в виде стандартных блоков ЭВМ - блоков постоянных запоминающих устройств игровых программ, стандартных программ соответственно. Блоки 7 и 8 соединены с блоком 6. Блок 6 соединен с блоком 9.
Блок 9 соединен с блоком 10 и блоком 3.
Блок 10 - блок формирования звукового и (или светового сигнала окончания процедуры, например, конца игры. Блок 10 соединен с блоком 3. Блок 3, выполненный в виде стандартного блока ввода-вывода ЭВМ, соединен с блоком 1 и 11 шлема.
Блок 11 - усилитель, соединенный с блоком 12 - светодиодной матрицей.
Блок 12 - светодиодная матрица. Светодиоды в матрице расположены с шагом 0,25 мм, обеспечивая компактность. 460 элементов матрицы разделены на 21 дискретно адресованный сегмент, каждый сегмент образован ~20 светодиодами [2].
Светодиодная матрица излучает свет в направлении на оптическую призму (блок 13). Индуцируемое изображение имеет красный цвет.
Блок 13 - оптическая призма изменяет ход лучей в направлении на внутреннюю поверхность полупрозрачного отражателя смотрового щитка (блок 14) и исправляет аберрацию, порожденную несоосностью со сферическим полупрозрачным отражателем.
Кривизна поверхности отражателя 14 обеспечивает коллимацию изображения и отражение его в глаз оператора.
Пример реализации способа измерения координат шлема оператора согласно блок-схеме фиг. 1 приведен для случая использования способа в игре: "Ловля сачком рыбки, плавающей в аквариуме". В этой игре метка-символ "сачок" изменяет свое положение в соответствии с положением шлема игрока в игровом пространстве.
Шлем с установленной на нем заарретированной МИС 1 закрепляют в начальном положении на устройстве 2 выставки. Устройство 2 выставки совмещено непосредственно с тренажерным (игровым) креслом 17 на определенной высоте, например, на высоте 1,5 м. Тренажерное кресло 17 располагают в правом углу игрового пространства, огражденного, например, канатным барьером. Игровое пространство определено в инерциальной системе координат МИС шлема, ось OX направлена на Север, ось OZ направлена по вертикали. Размеры игрового пространства в плане определены, например, 4•4 м2. Центр масс МИС в плане имеет координаты (0,0).
Перемещением подвижного сиденья кресла подводят голову сидящего в кресле игрока под шлем, закрепляют шлем на голове игрока. Осуществляют выставку осей координат инерциальной системы в соответствии с начальным положением шлема, причем за начало координат инерциальной системы принимают, например, цент масс этой системы, при этом ортогональные оси OX, OY инерциальной системы направляют в горизонтальной плоскости, причем ось OX направляют на Север, а ось OZ инерциальной системы координат ориентируют по местной вертикали.
С клавиатуры ЭВМ (блок 4) вводят NN игры и признак L=1 выставки начального положения виртуальной действительности, например, положения рыбки и метки-признака (сачка) в аквариуме. Аквариум в плане совпадает с игровым пространством и ограничен по оси OZ значениями OA'=0,3 м, OA=1,0 м, OO'=1,5 м (см. фиг. 5).
Начальное положение рыбки и метки-символа (сачка) определяют, например, величинами xp=(3,5 м, 0,2 м, 0,1 м) и xm=(0, 0, 0).
Сигнал с признаком L=1 и NN игры проходит на командный процессор (блок 5) ЭВМ, который дает команду загрузки в ОЗУ (блок 6) ЭВМ игровой программы NN и стандартных программ, необходимых для выполнения программы NN из ЗУ (блоков 7 и 8) ЭВМ.
Из ОЗУ (блока 6) сигнал поступает в ВУ ЭВМ (блок 9) и через блок 3 (входа-выхода ЭВМ) на усилитель (блок 11) шлема. Усиленный сигнал поступает на светодиодную матрицу (блок 12). Светодиодная матрица испускает лучи света в направлении на оптическую призму (блок 13) шлема. Оптическая призма изменяет ход лучей в направлении на внутреннюю поверхность полупрозрачного отражателя смотрового щитка (блок 14). Полупрозрачный отражатель отражает лучи в глаз игрока. Игрок наблюдает начальную виртуальную действительность и метку-символ (сачок) в ней.
После адаптации игрока к изображению на полупрозрачном отражателе отсоединяют шлем от тренажерного кресла и с клавиатуры ЭВМ задают режим игры NN с признаком L=2. Сигнал с признаком L=2 проходит блоки 5, 6 на ВУ ЭВМ. При этом МИС 1 шлема измеряет абсолютные координаты шлема игрока, например, по месту установки инерциальной системы при перемещении игрока и (или)головы игрока в игровом пространстве. Электрические сигналы, эквивалентные абсолютным координатам МИС 1, передают через блок 3 ввода-вывода ЭВМ на командный процессор 5 и далее через ОЗУ (блок 6) на вычислительное устройство 9. Вычислительное устройство 9 осуществляет определение положения рыбки и сачка с упреждением во времени на Δt , например Δt =0,05 с, за виртуальное время Δtв =0,01 с и задерживает пропуск сигнала на время ΔT , например ΔT = 0,05 с. Задержку времени передачи сигнала осуществляют для дискретной синхронизации реального времени t и времени tв изменения виртуальной действительности, которое, в основном, определяет быстродействие ЭВМ.
Алгоритм работы ВУ представлен на фиг. 4. ВУ (9) определяет также выполнение условий наложения сачка на рыбку, при наложении сачка на рыбку формируют сигнал с признаком L=5, который без задержки во времени поступает в блок 10, который формирует звуковой и (или) световой сигнал успешного окончания игры. Сигнал из блока 10 поступает через блок 3 входа-выхода ЭВМ на МИС (1), который возвращает измерительные приборы МИС в начальное положение.
При отсутствии наложения сачка на рыбку сигнал с ВУ (9) поступает через блок 3 входа-выхода ЭВМ на усилитель (блок 11) шлема, усиленный сигнал поступает на светодиодную матрицу (блок 12). Излучение светодиодной матрицы проходит через оптическую призму (блок 13) и попадает на внутреннюю поверхность полупрозрачного отражателя смотрового щитка шлема (блок 14). Полупрозрачный отражатель отражает лучи света в глаз игрока. Игрок наблюдает текущую виртуальную действительность и метку-симвом (сачок) в ней, перемещает тело и (или) голову в направлении и со скоростью, позволяющими наложить сачок на рыбку.
При прерывании игры по желанию игрока с клавиатуры ЭВМ задают режим прерывания с признаком L= 3, по истечении времени игры Tк, например Tк=15 мин, с клавиатуры задают режим окончания игры с признаком L=3.
Приложение 1. Описание задания вектора скорости Vр рыбки в программе игры.
1. В неугрожаемом положении (расстояние R между рыбкой и сачком больше заданного Rс, например Rо=1,0 м) рыбка перемещается по периметру аквариума эквидистантно боковой поверхности аквариума на постоянной высоте со скоростью  , например,
, например,  =1,0 м/с (маневр NM=1)
=1,0 м/с (маневр NM=1)
2. В угрожаемом со стороны хвоста положении рыбка совершает маневр уклонения NM=2 в течение времени Tм2, например Тм2=1,5 с. Маневр уклонения заключается в развороте вверх (вниз) со скоростью  = 2,5 м/с в течение 0,1 с, последующем движении прежним курсом со скоростью
= 2,5 м/с в течение 0,1 с, последующем движении прежним курсом со скоростью  = 2,0 м/с в течение 1,4 с.
= 2,0 м/с в течение 1,4 с.
Выбор направления вверх-вниз при маневре определяют значениями угловых скоростей wz и wy шлема игрока в инерциальной системе координат, например, при wz>OVwy<0 или wz<OVwy>0 - вниз, в противном случае - вверх.
3. В угрожаемом положении со стороны головы рыбка совершает маневр уклонения NM=3 в течение времени Тм3, например Тм3=2,0 с. Маневр уклонения заключается в развороте вправо (влево) в горизонтальной плоскости на 180o со скоростью  =2,5 м/с в течение 0,1 с, последующем движении по периметру аквариума в горизонтальной плоскости со скоростью
=2,5 м/с в течение 0,1 с, последующем движении по периметру аквариума в горизонтальной плоскости со скоростью  =1,8 м/с в течение 1,9 с. Радиус разворота на 180o определен величиной Rp=0,15 м. Выбор направления вправо-влево при маневре определяют значениями угловых скоростей wx и wz шлема игрока в инерциальной системе координат, например, при wx<0 V wz<0 или wx>0 V wz>0 - вправо, в противном случае - влево.
=1,8 м/с в течение 1,9 с. Радиус разворота на 180o определен величиной Rp=0,15 м. Выбор направления вправо-влево при маневре определяют значениями угловых скоростей wx и wz шлема игрока в инерциальной системе координат, например, при wx<0 V wz<0 или wx>0 V wz>0 - вправо, в противном случае - влево.
Общее ограничение для пп. 2 и 3. При нахождении рыбки от стенки аквариума, в направлении которой должен быть выполнен маневр разворота (вправо-влево, вверх-вниз), на расстоянии, меньшем величины RА, например RА= 0,4 м, рыбка делает маневр в противоположном (расчетному) направлении.
4. При попадании рыбки и сачка в некоторую "позицию" успешного лова (в каждой игре NN определено несколько таких "позиций", например 6), характеризуемую, например, ,
,
где - заданные координаты рыбки и сачка,
- заданные координаты рыбки и сачка, ,
,
рыбка перемещается по периметру аквариума с постоянной скоростью, например,  =0,6 м/с в течение времени I
=0,6 м/с в течение времени I
При выполнении рыбкой маневра NM=4 величина  в блоке 9 (см. фиг. 4) принимает значение, в k раз большее, чем в других случаях, например k=10 (при опорном значении
в блоке 9 (см. фиг. 4) принимает значение, в k раз большее, чем в других случаях, например k=10 (при опорном значении  =0,1 м).
=0,1 м).
Количество "позиций" успешного лова определяется компромиссом между финансовой выгодой игрового центра и заинтересованностью игрока в игре.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2010 |
|
RU2464617C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОРИЕНТАЦИИ ШЛЕМА ПИЛОТА И УСТРОЙСТВО НАШЛЕМНОЙ СИСТЕМЫ ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ | 2012 |
|
RU2516857C2 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВООРУЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА | 1999 |
|
RU2150070C1 |
| Способ динамической юстировки систем координат вертолета на основе их векторного согласования | 2023 |
|
RU2795354C1 |
| НАШЛЕМНАЯ СИСТЕМА ЦЕЛЕУКАЗАНИЯ И ИНДИКАЦИИ И СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОГО ПОЛОЖЕНИЯ ЛИНИИ ВИЗИРОВАНИЯ НА ЕЕ ОСНОВЕ | 2017 |
|
RU2674533C1 |
| Способ имитации коллимационного эффекта в проекционных системах визуализации внекабинной обстановки для авиационных тренажеров военного назначения и проекционная система визуализации | 2017 |
|
RU2647665C1 |
| СИСТЕМА ЦЕЛЕУКАЗАНИЯ | 2000 |
|
RU2216705C2 |
| Система интеллектуальной поддержки летчиков-истребителей в дальнем воздушном бою с парой истребителей противника | 2022 |
|
RU2789042C1 |
| СИСТЕМА ИМИТАЦИИ ВИЗУАЛЬНОЙ ОРИЕНТИРОВКИ ЛЕТЧИКА | 1997 |
|
RU2128860C1 |

Изобретение относится к авиационной технике, к системам нашлемного целеуказания, индикации, к единой системе целеуказания и индикации (НСЦИ), комплексирующихся с обзорно-прицельными и индикационными системами (телевизионными, тепловизионными, радиолокационными), и может найти применение при отработке на стендах, тренажерах, а также в игровых центрах коммерческого назначения, моделирующих боевую, естественно-научную или игровую обстановку. Способ измерения включает определение положения шлема оператора относительно осей координат. При этом на шлеме устанавливают инерциальную систему, осуществляют выставку осей координат инерциальной системы в соответствии с начальным положением шлема и измеряют абсолютные координаты оператора, например, по месту установки инерциальной системы, причем за начало координат инерциальной системы принимают, например, центр масс этой системы в момент выставки, ортогональные оси OX, OY инерциальной системы координат направляют в горизонтальной плоскости, причем ось OX направляют на Север, а ось OZ инерциальной системы координат ориентируют по местной вертикали. Способ обеспечивает расширение области измеряемых координат шлема оператора, устраняет зависимость области измерения координат от геометрии тренажерной или боевой кабины летательного аппарата. Приведен пример реализации способа измерения координат шлема оператора в игровом центре коммерческого назначения. 1 з.п. ф-лы, 5 ил.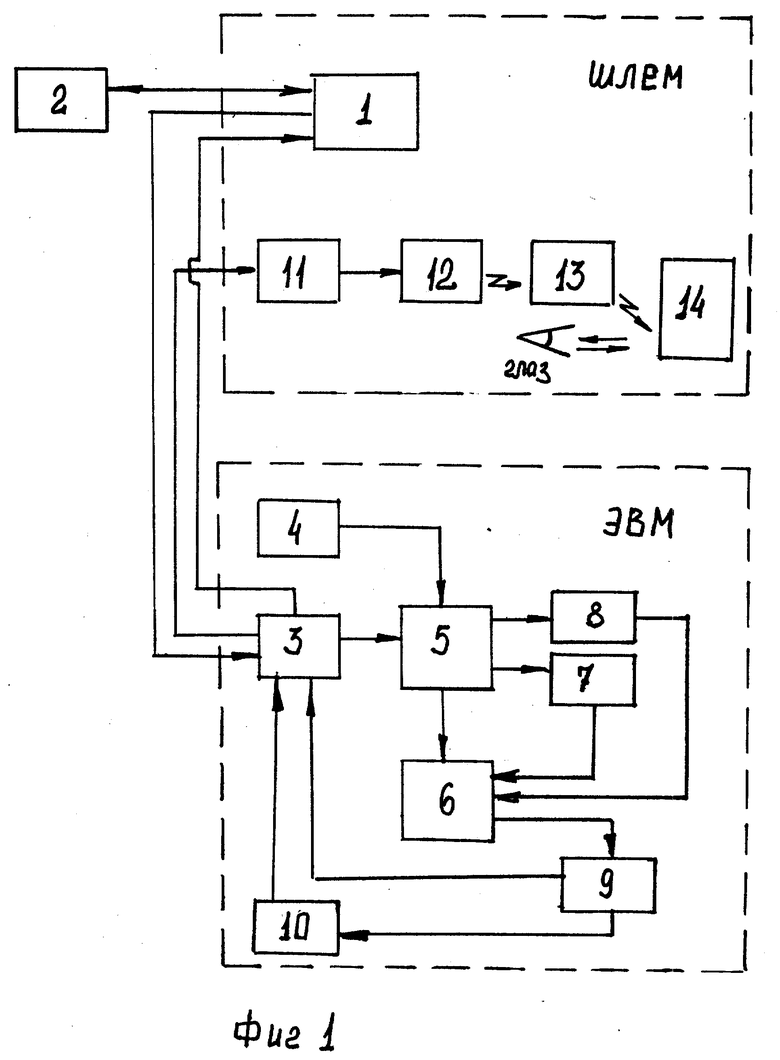
| Нашлемные системы целеуказания и индикация тактической авиации | |||
| Обзор по материалам иностранной печати | |||
| - НИЦ, 1980, N 53, с.7, 8 и 53 | |||
| Нашлемные системы целеуказания и индикации тактической авиации | |||
| Обзор по материалам иностранной печати | |||
| - НИЦ, 1980, N 55, с.44-50. |

