Изобретение касается систем связи для обработки данных, и более конкретно - системы связи для обработки данных с последовательными каналами связи, содержащей каскадно включенные коммутаторы.
Связи между элементами в системе обработки данных играют очень значительную роль. Это особенно верно в случае систем обработки данных с высоким режимом работы. Такие системы обработки данных с высоким режимом работы включают в себя технические автоматизированные рабочие места, которые соединены между собой для обеспечения информации между собой. Ряд типов систем связи для обработки данных был предложен в прошлом. Они включают в себя телефонные аналоговые системы, недавно - системы пакетной коммутации. Настоящее изобретение использует сеть последовательных каналов связи, содержащую многочисленные матричные коммутаторы. Соответственно связи между двумя автоматизированными рабочими местами могут осуществляться таким образом, что канал связи образуется фактически между автоматизированными рабочими местами и потому возможна непрерывная передача данных. Предшествующий уровень техники иллюстрирует ряд типов коммутаторов, обеспечивающих соединения между каналами связи. Один из них представлен в патенте США N 4864558 под названием "Коммутатор с самомаршрутизацией", который показывает коммутатор, имеющий серию стадий коммутации. Каждая стадия коммутации включает в себя множество каскадно включенных элементов памяти коммутатора. Элементы ЗУ/коммутации передают информацию непосредственно на другой соответствующий выходной канал, направленный наружу или смещенный наружу в соответствии с маршрутизацией информации. В этом изобретении маршрутизация становится возможной благодаря двоичной информации в данных.
Патент США N 4833468 под названием "Многослойная или многоуровневая сеть" показывает многослойную коммутационную сеть или коммутационную сеть, имеющую последовательность стадий, где переключатель в одной стадии образует запрос сообщения на переключатель в следующей последовательной стадии, основываясь на информации самого запроса сообщения.
Патент США N 4032899 под названием "Способ и устройство для коммутации данных" является описанием пакетной информации. Соответственно пакеты данных посылаются от одного узла на другой узел. Передача пакетов не требует, чтобы существующие коммуникационные каналы существовали между узлами, а требует, чтобы пакет передавался в течение всего периода времени. Этот патент касается способа запоминания и передачи временно запоминаемого пакета пока он не будет передан на следующий порт для передачи на узел назначения.
Аналогичным образом патент США N 4623996 под названием "Пакет, коммутируемый коммутационным узлом с многочисленной очередностью 11 х М и способ обработки" описывает передачу пакетов данных, содержащих маркеры маршрутизации. Очередности обеспечиваются в промежуточных портах для временного запоминания пакетов данных, которые могут загружаться в ЗУ и позже передаваться.
Бюллетень технических решений IBM, т. 18, N 9, февраль 1976 г., с. 3059-3062, в работе под названием "Явная маршрутизация трассы для коммутационной сети" представляет пакетную коммутационную схему, где сам пакет содержит информацию заголовка, которая указывает входы для программы маршрутизации, где программа маршрутизации является адаптивным маршрутизирующим алгоритмом, который определяет трассу для передачи пакета.
Бюллетень технических решений IBM, т. 18, N 6, ноябрь 1975г., с. 1787-1788, в работе под названием "Способ постановки на очередь для распределения полосы частот в пакетной коммутационной сети" представляет способ передачи пакетных данных, который включает в себя очередности по трассе узла связи, где данные, поставленные на очередь, приобретают приоритет, на основании которого очередность загружается в ЗУ. Благодаря этому сообщения с более высоким приоритетом, которые должны быть переданы быстро, могут запоминаться в порядке очередности, которые будут передаваться с большей частотой, чем более медленно передаваемые очередности в узле.
В бюллетене технических решений IBM, т. 18, N 6, ноябрь 1975 г., с. 1784, в работе под названием "Приоритетизированная адатипная маршрутизация в пакетной коммутационной сети", описывается маршрутизация пакетов на основе приоритета. Более высокий приоритет будет определять, что пакет должен передаваться через наименьшее число узлов, насколько это возможно, тогда как более низкий приоритет может передаваться через большее количество узлов.
В бюллетене технических решений IBM, т. 23, N 1, июнь 1980, с. 286-187, в работе под названием "Управление переполнением буфера блоков" описываются способы запоминания и передачи для передачи пакетных данных.
В бюллетене технических решений IBM, т. 18, N 7, декабрь 1975 г., с. 2110, в работе под названием "Управление нагрузкой и пакетные коммутационные сети" описывается основанная на приоритете системы для маршрутизации пакетов через узлы.
В бюллетень технических решений IBM, т. 18, N 7, декабрь 1975., с. 2109, в работе под названием "Эффективная передача данных в пакетных коммутационных сетях" описывается способ передачи массовой нагрузки, где массовая нагрузка определяется как большое число сообщений, имеющих общее происхождение и общее назначение. В такой ситуации массовая нагрузка может быть идентифицирована при управлении связью, чтобы распределение ЗУ и возможность канала могли быть обеспечены для более эффективного потока этой массовой нагрузки.
Несколько примеров прототипов в телефонной коммутации будут представлены ниже.
Патенты США NN 4543653, 4550398, оба под названием "Модульная с самомаршрутизацией ИКМ коммутационная сеть для телефонных АТС с распределенным управлением" представляют коммутацию импульсно-кодовой модуляции (ИКМ) для телефонных соединений.
В бюллетене технических решений IBM, т. 28, N 7, декабрь 1985г., с. 2763-2766, в работе под названием "Десять тысяч линий цифровой центральной станции" описывается цифровая коммутационная телефонная сеть, которая может расширяться.
В бюллетене технических решений IBM, т. 25, N 7, сентябрь 1982 г., с. 2231-2232, в работе под названием "Инвертор на двух транзисторах занятого вызова" описывается схема для передачи вызова, произведенного по занятому продолжению, на систему речевой почвы.
В бюллетень технических решений IBM, т. 25, N 7B, декабрь 1982 г., с. 3956-3960, в работе под названием "Схема детектирования сигнала для кольцевых систем равный-с-равным", описывается кольцевая коммуникационная система, где каждый компьютер, соединенный с коммуникационным кольцом, принимает сообщение от предшествующего установленного компьютера. В этой работе описывается схема, дающая возможность компьютеру определять условия ошибки в принятых сообщениях.
Цель настоящего изобретения состоит в создании системы связи с последовательными каналами для соединения двух устройств в системе обработки данных. Это соединение коммутаций образует продолжающийся коммуникационный канал для образования прямой связи от одного устройства до другого.
Дальнейшая цель настоящего изобретения состоит в создании системы связи для цифровой обработки, используя последовательные каналы связи, имеющей каскадно включенные коммутаторы, где устройство, соединенное с одним коммутатором, может непосредственно сообщаться с устройством, соединенным с другим коммутатором.
В соответствии с настоящим изобретением система связи с последовательными каналами содержит первый и второй коммутаторы, где каждый коммутатор соединен с множеством устройств, образующих последовательный коммуникационный канал связи между любыми двумя устройствами, соединенными с этим коммутатором. Каждый коммутатор также включает в себя межкоммутаторное соединение, образующее последовательный канал коммуникационной связи между устройством, соединенным с первым коммутатором, и устройством, соединенным со вторым коммутатором.
На фиг.1 представлена блок-схема сети системы связи с последовательными каналами, содержащей каскадно включенные коммутаторы; на фиг.2 - блок-схема матричного коммутатора; на фиг.3 - схема событий, показывающая нормальные коммуникации от порта к порту; на фиг.4 -аббревиатурная схема событий нормальной коммуникации от порта к порту, как показано на фиг.3; на фиг.5 - схема событий, показывающая нормальную связь АТС через соединение матричного коммутатора с матричным коммутатором; на фиг.6 - схема событий, показывающая условие занятости в канале связи от порта к порту через один матричный коммутатор; на фиг.7 - схема событий, показывающая условие занятости в соединении матричного коммутатора с матричным коммутатором; на фиг.8 - 10 - схема событий, показывающая условие столкновения в соединении матричного коммутатора с матричным коммутатором; на фиг.11 - блок-схема порядка действий, показывающая операционное управление порта в отношении внешних данных, принятых по каналу от соединенного устройства; на фиг.12 - блок-схема порядка действий, показывающая управляющие операции для управляющей шины посредством контроллера порта; и на фиг.13 - блок-схема порядка действий, показывающая управление порта в отношении коммуникаций от матричного коммутатора.
На фиг.1 представлена блок-схема, показывающая сеть связи с последующими каналами, включающую в себя четыре дискретных системы, соединенные с тремя матричными коммутаторами. Система 16 соединена через двунаправленный последовательный канал данных 59 с портом A матричного коммутатора 10. Матричный коммутатор 10 также соединен с системой 18 через двунаправленный последовательный канал 24 через порт B. Матричный коммутатор 10 также включает в себя порт C, который через двунаправленный последовательный канал 26 соединен с вторым матричным коммутатором 12. Далее матричный коммутатор 10 через порт D соединен посредством двунаправленного канала данных 34 с третьим матричным коммутатором 14. Матричный коммутатор 12 соединен через порт E с двунаправленным каналом данных 26 с коммутатором 10. Дополнительно коммутатор 12 соединен через двунаправленный канал данных 29 в порте F с системой 20.
Также далее коммутатор 12 соединен в порте G через двунаправленный канал данных 32 с матричным коммутатором 14. Матричный коммутатор 14 соединен с матричным коммутатором 10 через порт H. Коммутатор 14 соединен через порт J с матричным коммутатором 12. Дополнительно матричный коммутатор 14 соединен через порт I, через двунаправленный канал данных 36 с системой 22. Матричный коммутатор (такой как матричный коммутатор 10) создает возможность для системы, такой как система 16, связи непосредственно с системой 18 путем установления прямого и полного соединения последовательного канала между линиями 59 и 24, коммуникационный канал в реальном масштабе времени устанавливается и данные, которые посланы от системы 16 по двунаправленному каналу 59, немедленно помещаются на последовательный канал 24 для системы 18 без промежуточного запоминания. Аналогичным образом система 16 может также сообщаться через матричный коммутатор 10 с матричным коммутатором 12, чтобы обеспечить информационную сеть по двунаправленному последовательному каналу 28 с системой 20. Это именуется, как каскадное включение (соединение) коммутаторов, так как два коммутатора 10 и 12 соединяются для образования соединения полного последовательного канала между системой 16 и системой 20.
Функционирование матричного коммутатора 10 при соединении системы 16 с системой 18 излагается подробно в одновременно поданной патентной заявке под названием "Матричный коммутатор с распределенным управлением" и одновременно поданной патентной заявке под названием "Перехват" (подслушивание) третьей стороны для управления шиной", которые здесь включены в качестве прототипа.
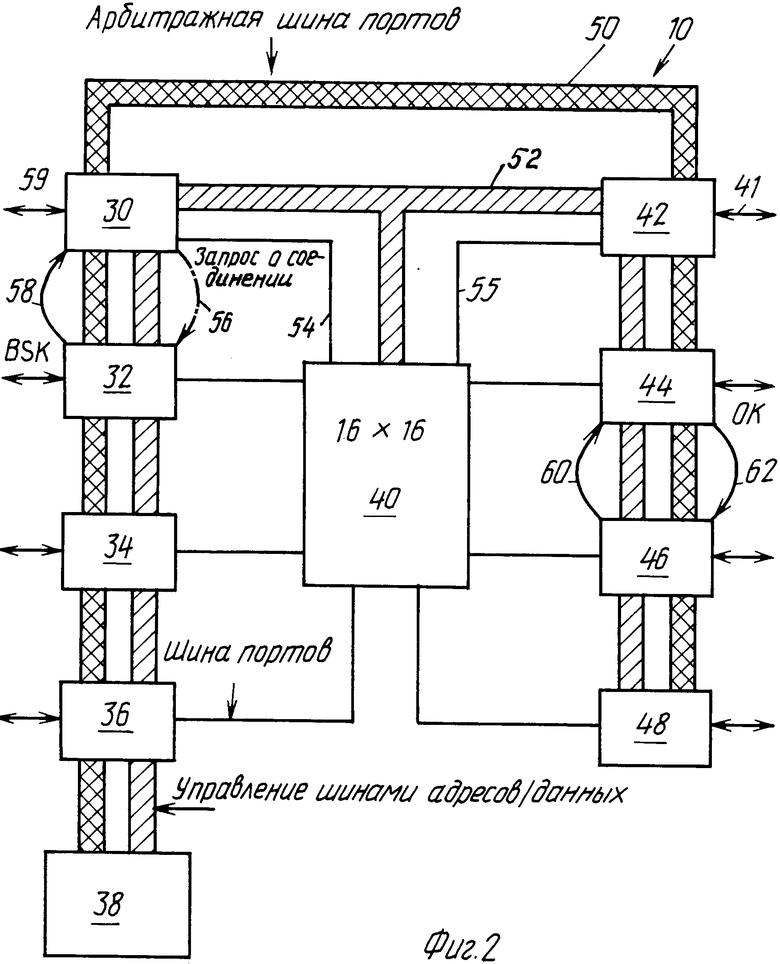
На фиг. 2 представлена блок-схема матричного коммутатора 10. В предпочитаемом варианте реализации используется коммутатор 16 х 16. Только для этого описания показано 8 портов из 16. Каждый порт 30 соединен арбитражной шиной порта 50, управляющей шиной порта 52 и линиями передачи данных (такими как линии 54 и 55 для портов 30 и 42 соответственно). Каждый из портов соединен через линии данных с матричным коммутатором 40 16 х 16. Матричный коммутатор 40 может быть компонентом, имеющемся в готовом виде, таким как Гигабит Ложик 10051, который обеспечивает соединение точек пересечения между портами.
В предпочтительном варианте реализации каждый порт обеспечивает оптико-электрическое преобразование, чтобы информация электрически проходила между портами через матрицу 40 16х16. Первоначально порт, такой как 30, может попытаться соединиться с другим портом, таким как порт 32. Сначала порт 30 запрашивает арбитраж (разрешение конфликта), т.е. порт 30 запрашивает предоставление арбитражной шины 50 через шинный арбитр 38. После получения предоставления такой возможности запрос о соединении пропускается по управляющей шине 52 на порт 32. Состояние затем принимается. На фиг.2 показан пример, когда порт 30 пытается установить контакт с портом 32 путем посылки запроса, символически обозначенного пунктирной стрелкой 56. Порт 32 посылает сигнал занятости, обозначенный символически стрелкой 58 обратно на порт 30, отклоняя запрос о передаче. Следует отметить, что во время этой начальной попытки соединение порта с портом матрица 16х16 недоступна для использования.
Это возможно в результате наличия управления механизмом коммутации, распределенного между портами. Иначе говоря, только после получения/подтверждения передача данных может иметь место, коммутатор 40 включается в соединение между портами.
Матричный коммутатор 40 соединен с управляющей шиной 52. Она может возбуждать матричный коммутатор 40 для ответа на команды, направленные ему. В предпочтительном варианте реализации единственными командами, которые направляются на матричный коммутатор 40, являются команды диагностического характера. В течение нормального функционирования матричный коммутатор 40 просто контролирует управляющую шину 52 и управляющую коммуникацию между портами для определения, когда соединения должны быть произведены или прекращены. Когда соединения произведены, линии, такие как 54, соединяются с линиями, такими как 55, для возможности передачи данных между портами, такими как порты 30 и 42, без запроса явных команд для коммутатора от портов или от другого управляющего устройства.
Операция разъединения производится посредством матричного коммутатора 40 без какой-либо команды от портов. Матричный коммутатор 40 производит перехват по командной шине 52 для определения, когда должно быть произведено разъединение, путем рассмотрения команд в отношении разъединения по управляющей шине 52. Когда фрейм об окончании посылается одной системой другой, матричный коммутатор 40 путем контроля управляющей шины 52 автоматически определяет, когда соединение должно быть разъединено, там самым экономя время в результате незапрашивания протокола отдельной команды, чтобы сказать матричному коммутатору произвести разъединение. Это важно, потому что операция разъединения представляет высокий приоритет, так как дальнейшие соединения с любым из этих портов могут производиться только в случае, когда это разъединение происходит.
Коммутатор 10 дополнительно соединен с другим матричным коммутатором 12 через порт C. Порт C выполнен как любой другой порт, такой как A или B, за исключением, что порт C включает в себя специальные управляющие операции для образования соединения последовательного канала с другим матричным коммутатором. Эти дополнительные управляющие средства будут пояснены ниже.
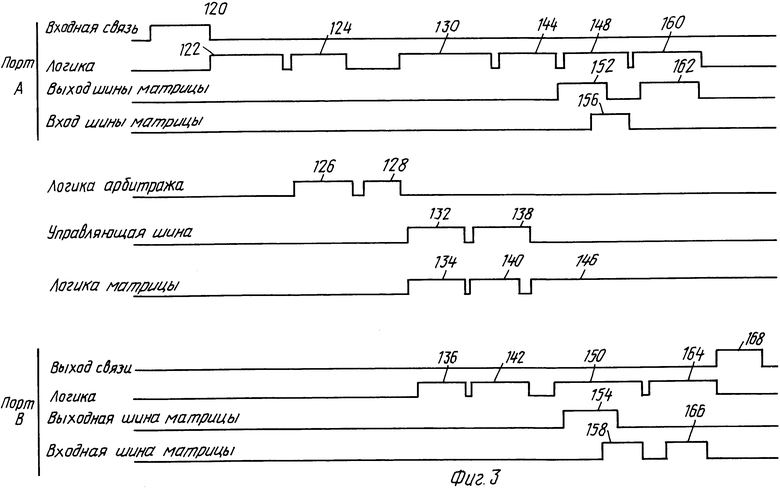
На фиг. 3 представлена схема событий, показывающая взаимные соединения порта A и B в коммутаторе 10, соединяющем системы 16 и 18.
На фиг.3 фрейм сначала принимается портом по шине, такой как 59 (фиг.2) в событии 120. В событии 122 логика порта исследует фрейм и определяет установление соединения, в событии 124 - решение конфликта в отношении управляющей шины. Арбитр шины 38 принимает запрос в событии 126 и допускает запрос в событии 128. В это время логика порта A выдает запрос соединения 130, который включает в себя адреса портов, связанных с управляющей шиной 52, обозначенные событием 132. Матрица 40 рассматривает этот запрос в событии 134 и фиксирует адреса порта, в то время как логика порта B принимает этот запрос в событии 136. Логика порта B затем посылает ответ 142, который также рассматривается матрицей 40 в событии 140 по управляющей шине 52, как показано событием 132. Этот ответ считывается логикой порта A в событии 144. В этом примере производится последовательное соединение, поэтому матрица 40 будет производить соединения между соединением последовательных каналов между портами A и B. Логика порта A тогда производит сигналы квитирования установления связи с портом B по матричной шине. Сначала квитирование связи из событий 152 и 154 производится из обоих портов и затем квитирование установления связи в событиях 156 и 158 производится обратно из обоих портов на противолежащие порты. Наконец фрейм посылается на событие 160 и из матричной шины в событии 162 на матрицу в линии порта B в событии 166, где логика порта изучает фрейм в событии 164. Этот фрейм затем появляется на выходе канала для соединенного устройства в событии 168.
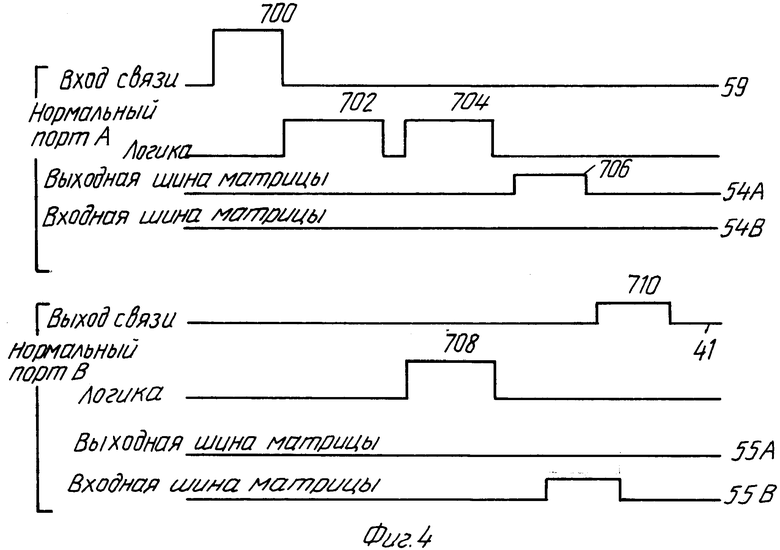
На фиг. 4 представлена схема событий, показывающая сокращенный вариант соединений каналов между системами 16 и 18. В событии 700 фрейм IN принимается от системы 16 матричным коммутатором 10. Фрейм содержит в себе идентификацию источника и идентификацию назначения. В предпочитаемом варианте реализации идентификация источника и идентификация назначения каждая являются двумя словами. В этом примере идентификация источника будет "АО", идентификация назначения будет "ВО". Логика порта в событии 702 определяет, что источником является порт A, а назначением является порт B. Порт A в событии 704 запрашивает соединения с портом B. Это соединение производится в событии 708 так же, как описано ранее через матрицу 40. После выполнения соединения порт A посылает фрейм в событии 706 по матричной выходной шине 54A. Фрейм принимается в матричной шине в линии 55B в событии 712. Порт B затем обеспечивает этот фрейм для системы 18 в событии 710.
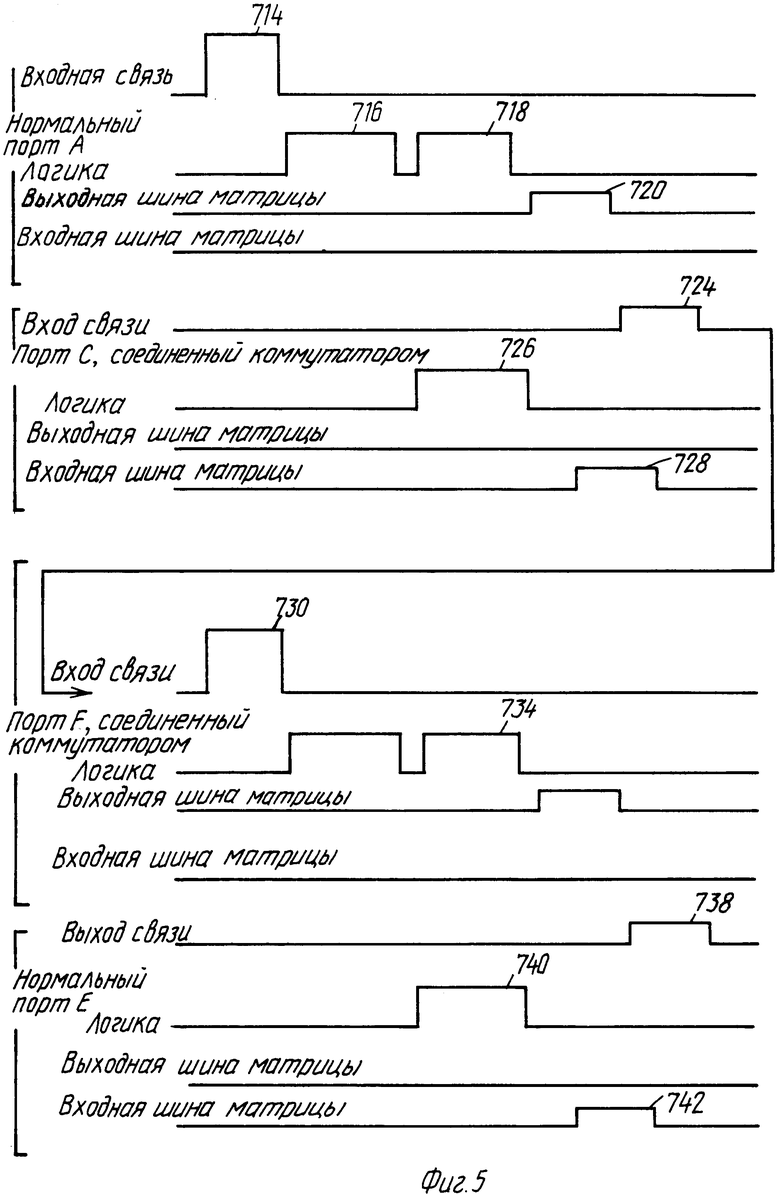
На фиг.5 представлена схема событий, показывающая соединение между системой 16 через порт A матричного коммутатора 10 с системой 20 через порт F в матричном коммутаторе 12. Чтобы выполнить это взаимное соединение, должно быть установлено соединение данных между матричным коммутатором 10 и матричным коммутатором 12. Это достигается путем соединения матричного коммутатора 10 через порт C по каналу данных 26 с портом E матричного коммутатора 12. На фиг. 5 представлена схема событий, показывающая установление этого канала связи. В событии 714 фрейм данных сначала принимается в порте A, содержащем идентификацию источника "AE" и идентификацию назначения "FC". Идентификация источника "AE" является идентификацией портов двух источников для двух матричных коммутаторов 10 и 12. Порт A является источниковым портом для коммутатора 10 и порт E является источниковым портом для коммутатора 12. Аналогичным образом, идентификация назначения "FC" обозначает порты C для коммутатора 10 и порт F для коммутатора 12 как порты назначения. Следует отметить, что нормальный порт использует SID(1) в качестве источникового порта и использует DID(2), если DID(2) не равен "0" в отношении фреймов, принятых по его каналам. Управляющая логика в порте A в событии 716 определяет использование идентификации источника A и идентификации назначения C, чтобы установить связи в событии 718 с портом C. В событии 726 канал связи устанавливается через матрицу 40, как сказано ранее. В это время в событии 720 фрейм затем пропускается по матрице на порт C в событии 728. Порт C затем пропускает фрейм в событии 724, который был принят в событии 730 портом E коммутатора 12 по двунаправленному последовательному каналу 26. Следует отметить, что идентификация источника и идентификация назначения являются тем самым, что принято в порте E в событии 730. Однако, как будет пояснено ниже, порт E функционирует иначе, так как порт E соединен с другим матричным коммутатором вместо того, чтобы быть соединенным с такой системой, как система 16. Поэтому в событии 732 управляющая логика порта E обозначает источник как E и назначение как F в запрашиваемых связях в событии 734 с портом F. Следует отметить, что соединенный коммутатором порт использует SID (2) как порт источника и использует DID(1) как порт назначения. Запрос связи завершается в событии 740 в управляющей логике порта F. Фрейм затем передается в событии 736 в матричной выходной шине из порта E через матрицу на матричную входную шину в событии 742 для порта F. Наконец фрейм образуется в событии 738, выходя на систему 20 по двунаправленному каналу 28 (фиг.1). Должно быть принято, что порт A не считает соединение завершенным пока не получен ответ от системы 20, указывающий на предоставление соединения. В этот момент все дальнейшие передачи могут использовать упрощенную идентификацию источника "AO" и идентификацию назначения "FO". В это время непрерывное соединение существует между системой 16 и системой 20.
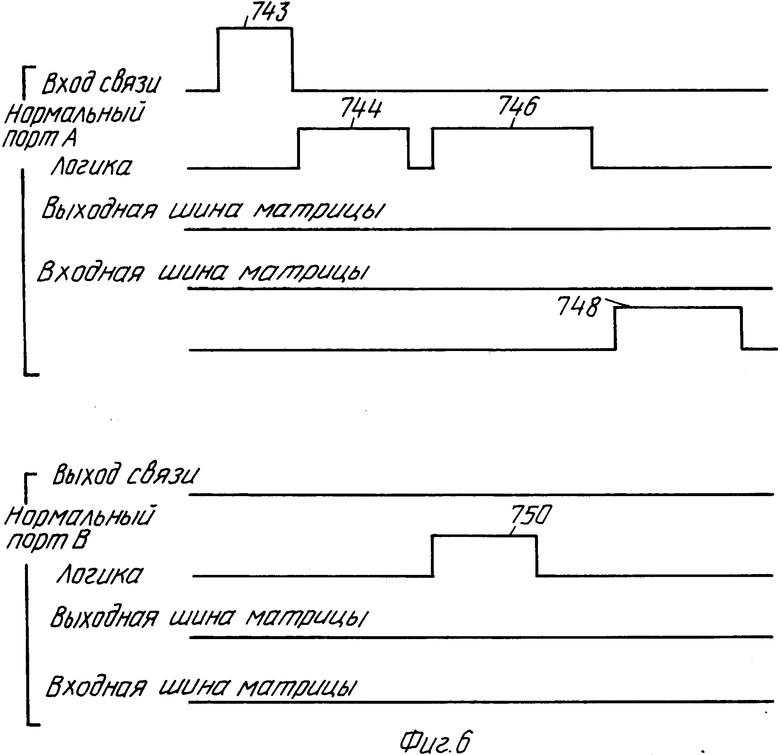
На фиг.6 представлена схема событий, показывающая попытку при соединении системы 16 с системой 18, когда система 18 уже занята. Это условие происходит в случае, когда система 18 уже соединена через матричный коммутатор 10 с другой системой, такой как система 22, через матричный коммутатор 14. Когда система 16 инициирует связь путем образования фрейма данных в событии 743, фрейм включает в себя идентификацию источника и идентификацию назначения, как ранее изложено в связи с фиг.4. Логика порта A в событии 744 определяет, что источником является порт A и что назначением является порт B. Затем в событии 746 предпринимается попытка установить соединение с портом B. В событии 750 порт B определяет, что он занят и образует идентификацию занятости обратно для порта A. Поэтому в событии 746 управляющая логика в порте A определяет, что порт B занят и что канал связи не может быть установлен. Порт A образует фрейм занятости на выходном канале (внешний участок последовательного канала 59) в событии 748 для системы 16, указывая, что канал связи не может быть установлен. Фрейм занятости оканчивается специальным концом (концовкой) ограничителя фрейма, который указывает порту A, что соединение не существует. Когда это соответствует обстоятельствам, этот специальный конец фрейма также указывает, что порт должен быть отключен.
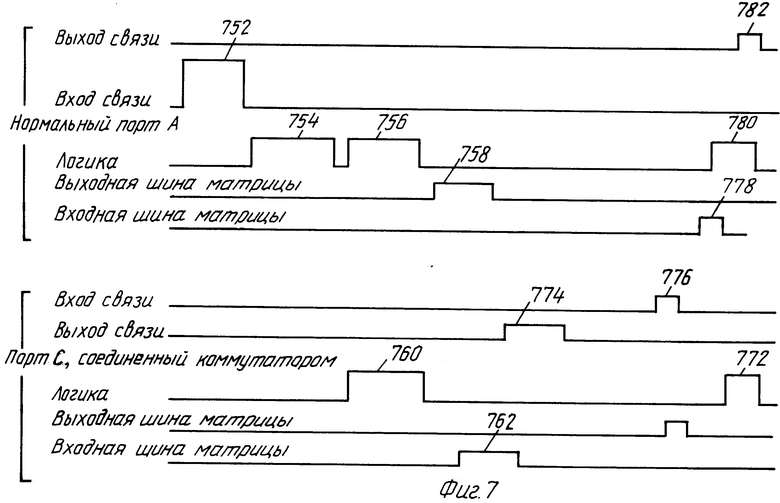
На фиг. 7 представлена иллюстрация попытки при соединении коммутатора с коммутатором между портами, когда существует условие занятости на принимающем порте каскадно включенного коммутатора. Иначе говоря, как показано на фиг. 1, система 16 пытается соединиться с системой 20. Это соединение производит для матричного коммутатора 10 взаимное соединение портов A и C и через порт C с E по соединению последовательного канала 26 с коммутатором 12. Коммутатор 12 будет тогда производить соединение между портами E и F, соединяя через последовательный канал 28 с системой 20. Это является взаимным соединением, описанным в связи с фиг.5. Однако в этом примере порт E занят. В событии 752 системы 16 создается фрейм для порта A. Этот фрейм будет содержать идентификацию источника "AE" и идентификацию назначения "FC". В событии 754 логика порта A определяет, что адрес источника есть A и адрес назначения есть C. Логика порта затем пытается установить связи с портом C в событии 756. Это принимается логикой порта C в событии 760 и коммуникация устанавливается через матричный коммутатор 40. В событии 758 фрейм посылается через матрицу портом A и принимается от матрицы в событии 762 с портом C. Фрейм затем подается со стороны канала на последовательный канал 26 в событии 774 на порт E матричного коммутатора 12. Порт E принимает фрейм в событии 764. Однако порт E в текущий момент занят. В событии 768 логика определяет, что порт находится в состоянии занятости, и посылает фрейм отсоединения/занятости. Фрейм занятости с отсоединением в конце ограничителя фрейма передается логикой в порт E в событии 768 по выходному каналу в событии 766. Цикл/блок занятости принимается портом C по его каналу в событии 776. Фрейм пропускается по матрице на выход в событии 770, проходя через матрицу 40, и поступает в порт A в событии 778. Когда порт A определяет ограничитель отсоединения в событии 780, порт A выдает запрос отсоединения на порт C. Порт C выполняет запрос об отсоединении в событии 772. Матрица контролирует этот запрос и устраняет соединение матрицы. Порт A пропускает фрейм по своему выходному каналу в событии 782 и посылает фрейм занятости с концовкой отсоединения цикла/блока на систему 16.
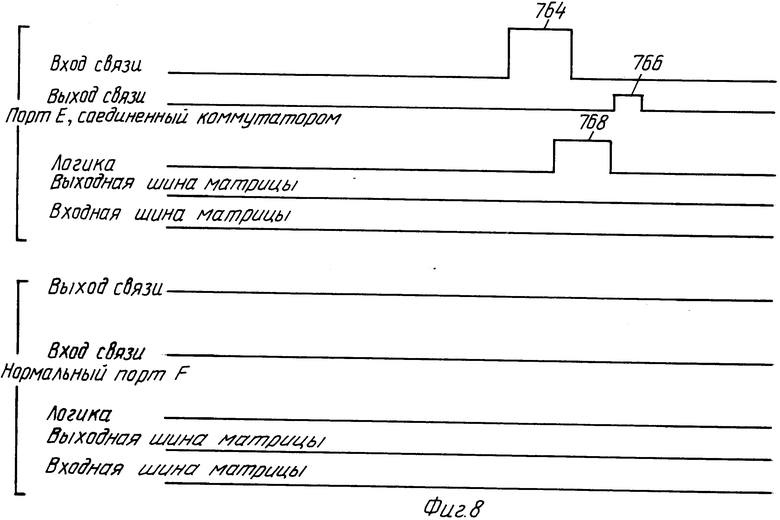
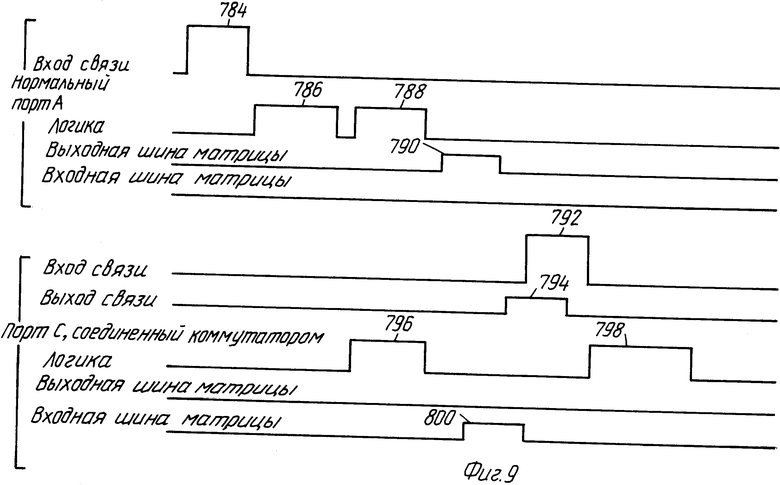
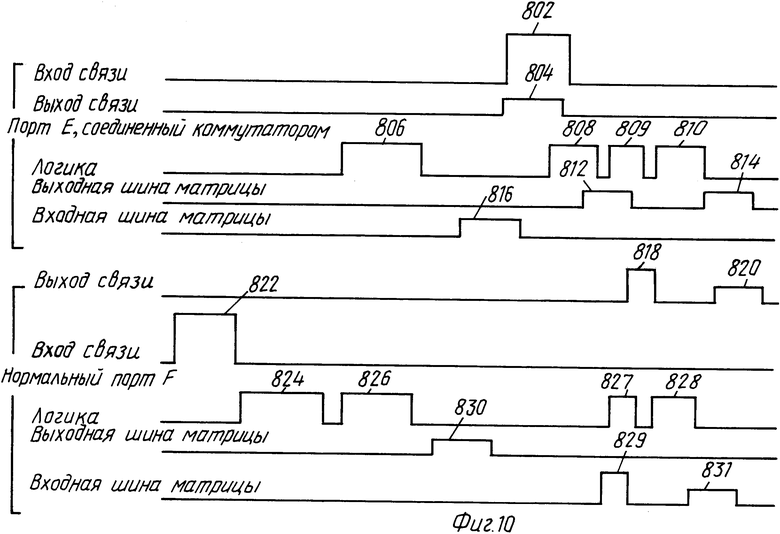
На фиг.8-10 показано условие столкновения связи. Это является условием, когда система, такая как система 16, пытается сообщаться через каскадно включенные коммутаторы (коммутаторы 10 и 12) с системой 20 в то же время, когда система 20 пытается сообщаться через каскадно включенные коммутаторы (коммутаторы 10 и 12) с системой 18. Это показывает другой признак настоящего изобретения, образующего соединение порта коммутатора с помощью приоритетов (фиг. 9). В этом примере предпочитаемого варианта реализации два коммутационных соединенных порта, порт C коммутатора 10 и порт E коммутатора 12, оба имеют приоритеты относительно друг друга. В этом примере порт C имеет более высокий приоритет, чем порт E. В событии 784 фрейм 1 принимается портом A с идентификацией источника "AE" и идентификацией назначения "FC". Как сказано ранее, логика порта A определяет в событии 786, что используемый идентификацией источника является A и используемый идентификацией назначения является C, и в событии 788 попытка установить коммуникационную связь с портом C. В событии 796 порт C производит квинтирование установления связи по управляющим шинам, описанным ранее, и коммуникационная связь между портами устанавливается по матрице 40. В событии 790 порт A посылает фрейм на матрицу. Это принимается от матрицы портом C в событии 800.
Обращаясь теперь к порту F и порту E, в то время, когда 1 передавался на порт A, цикл/блок 2 передается на порт F в событии 822 (фиг.10). Логика порта F принимает фрейм и определяет, что идентификация источника есть F и идентификация назначения есть E, тем самым пытаясь установить коммуникационную связь с портом E через свою матрицу в событии 826. В событии 806 порт E отвечает на установленные соединения через матрицу. Поэтому порт F в событии 830 посылает цикл-блок 2 по своей матричной выходной шине, который принимается портом E по его матрице в шине в событии 816.
Возвращаясь в порт C, порт C затем пытается посылать фрейм 1 по соединению своего последовательного канала в событие 794 на порт E. Это принимается портом E по его последовательному каналу в соединении в событии 802. Тем временем порт E посылает фрейм 2 в событии 804 по своему каналу из соединения с портом C, который принимается портом C в событии 792. Происходит столкновение. В этот момент логика в порте C и логика в порте F тогда определяет (1), что столкновение произошло, и (2) определяет, что порт с высоким приоритетом должен получить доступ к каналу и что такой доступ не должен представляться другому порту. В нашем примере порт C является портом с высоким приоритетом, поэтому C выигрывает конфликт и фрейм 2 пренебрегается портом C в событии 798. В это время управляющая логика порта E определяет, что порт C выигрывает конфликт, и определяет посылку сигнала по причине занятости обратно через матрицу в событии 812 на порт F. Порт F принимает фрейм в событии 829 и распознает ограничитель отсоединения, в результате чего запрашивает устранение соединения с портом E в событии 827. Порт E отвечает в событии 809. Порт F затем пропускает фрейм занятости на систему 20 в событии 818. После устранения соединения порт E запрашивает соединение, связанное с фреймом 1 в событии 810. В событии 828 порт F производит соединение и порт E пропускает фрейм 1 на порт F в событии 814. Порт F принимает фрейм в событии 831 и пропускает его на систему 20 в событии 820.
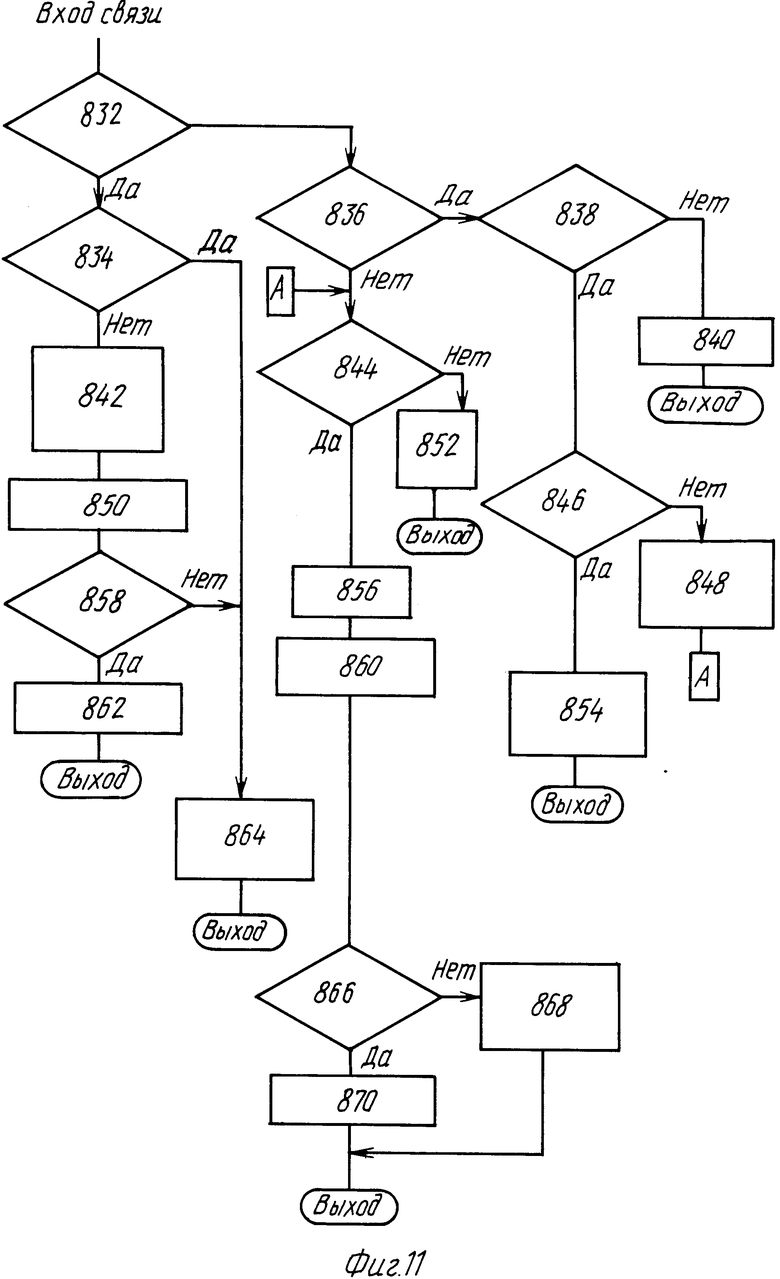
На фиг. 11 представлена блок-схема порядка действия для управления каналом в части порта. Сначала управление определяется на стадии 832, является ли это нормальным портом (система соединена) или соединяется через коммутатор. Если порт является нормальным портом, тогда на стадии 834 порт определяет, является или нет он занятым или соединенным. Если порт занят или уже соединен, логика приступает к действию на стадии 864. Однако, если он не занят, она приступает к стадии 842 и определяет использование первого идентификатора источника. Если второй идентификатор назначения есть 0, используется первый идентификатор назначения, в противном случае используется второй идентификатор назначения. Поэтому на стадии 850 управляющая логика порта запрашивает соединение через управляющую шину с портом, обозначенным идентификатором назначения. На стадии 858 управляющая логика определяет, совершено или нет это соединение, если нет, то приступает к стадии 864, чтобы послать сигнал занятости и индикацию отсоединения в конце ограничителя фрейма. Однако, если соединение выполнено, на стадии 862 фрейм пропускается на матрицу. Операция нормально соединенного порта далее поясняется в одновременно поданных патентных заявках, упомянутых ранее.
Возвращаясь к стадии 832, если порт является портом, соединенным коммутатором, управляющая логика приступает к стадии 836, чтобы определить, соединен уже или нет порт. Если порт соединен, приступает к стадии 838, чтобы определить, имеется ли запрос о соединении, если нет, порт приступает к пропусканию принятого фрейма на стадии 840. Возвращаясь к стадии 838, если запрос о соединении был принят, порт тогда определяет, является или нет этот порт с высоким приоритетом, так как обнаружено столкновение. Если нет, на стадии 848 порт посылает занятость с отключением в конце фрейма по своей матрице на свой соединенный порт и систему. Управляющая логика затем приступает к стадии 844. Возвращаясь к стадии 836, если порт не соединен, он приступает к стадии 844 для определения, принят ли запрос о соединении, если нет, запрос не распознается и игнорируется на стадии 852. Однако, если запрос был принят на стадии 844, управляющая логика приступает к стадии 856 и определяет, использовать вторую идентификацию источника и первую идентификацию назначения. Затем на стадии 860 порт пытается установить соединение через матрицу с портом назначения. На стадии 866 управляющая логика определяет, произведено или нет это соединение, если нет, он посылает занятость с концовкой фрейма с индикацией отсоединения на стадии 868, если да, приступает к стадии 870 для пропускания фрейма.
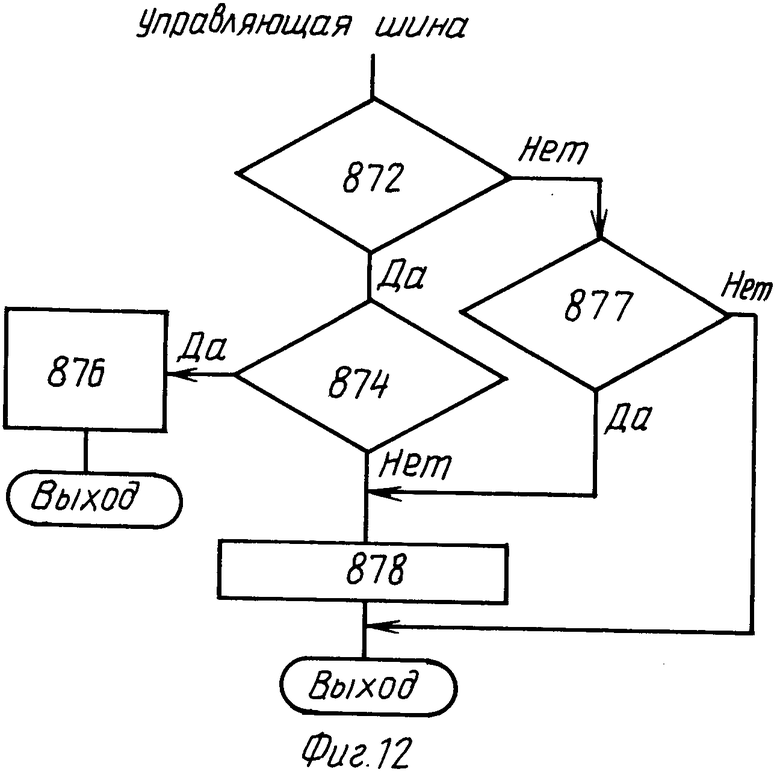
На фиг.12 представлена блок-схема порядка действий, иллюстрирующая функционирование управляющей логики порта, соединенного с управляющей шиной. На стадии 872 определяет, является ли запрос запросом о соединении. На стадии 874 она определяет, является или нет в настоящий момент занят или соединен, если да, она реагирует отрицательно по управляющей шине на стадии 876, если нет, тогда на стадии 878 она выдает запрос. На стадии 877 логика проверяет для определения, есть ли запрос об отсоединении от порта, если да, запрос посылается на стадии 878.
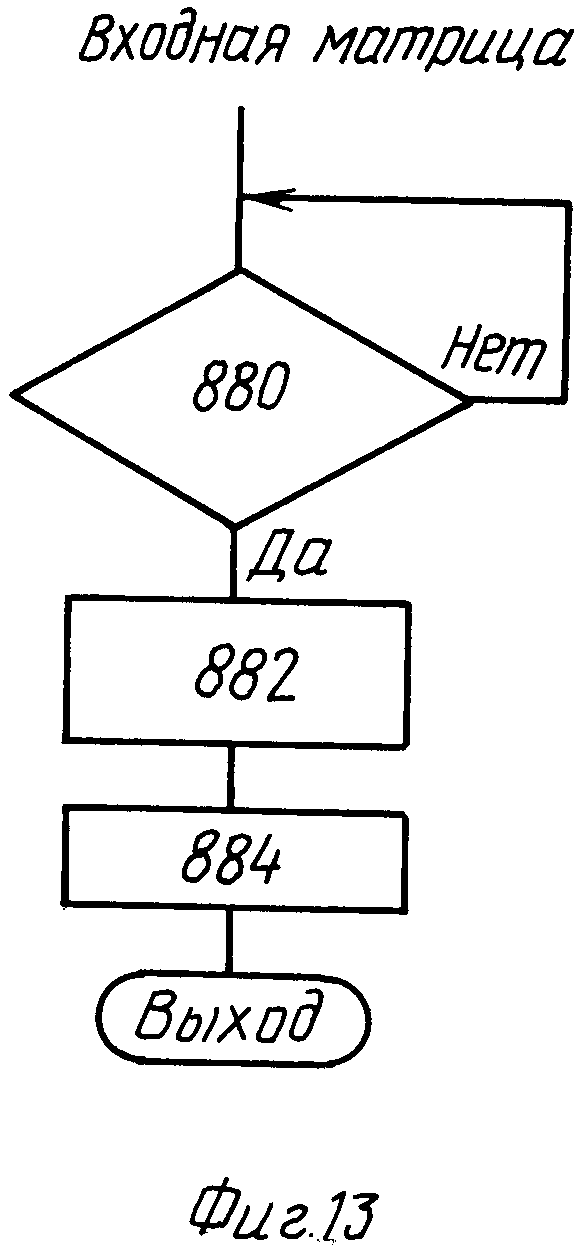
Управляющее функционирование матрицы в соединении показано на фиг.13. Эта логика определяет на стадии 880, принят ли конец файла фрейма об отсоединении, если нет, она возвращается назад, если да, она устраняет соединение через матрицу на стадии 882 и входит в неактивную фазу на стадии 884.
Хотя это изобретение описано со ссылкой на показанный вариант реализации, это описание не предназначено для толкования в ограничительном смысле. Разные модификации показанного варианта реализации, а также других вариантов реализации изобретения станут очевидны для специалистов в этой области техники при ознакомлении с этим описанием. Поэтому считается, что прилагаемые пункты формулы изобретения охватывают такие модификации или варианты реализации, которые входят в действительный объем изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА СВЯЗИ | 1991 |
|
RU2111532C1 |
| СИСТЕМА СВЯЗИ | 1991 |
|
RU2110839C1 |
| ПАРАЛЛЕЛЬНАЯ ПРОЦЕССОРНАЯ СИСТЕМА | 1991 |
|
RU2084953C1 |
| УСТРОЙСТВО ДЛЯ ОПТИМИЗАЦИИ ОРГАНИЗАЦИИ ДОСТУПА К ОБЩЕЙ ШИНЕ ВО ВРЕМЯ ПЕРЕДАЧИ ДАННЫХ С ПРЯМЫМ ДОСТУПОМ К ПАМЯТИ | 1991 |
|
RU2110838C1 |
| КОНТРОЛЛЕР СВЯЗИ С ПОМОЩЬЮ ИНФРАКРАСНОГО НАПРАВЛЕННОГО ИЗЛУЧЕНИЯ С МНОЖЕСТВОМ ПРОТОКОЛОВ | 1995 |
|
RU2126593C1 |
| СИСТЕМА ОБРАБОТКИ И СПОСОБ ЕЕ ФУНКЦИОНИРОВАНИЯ | 1994 |
|
RU2150738C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ СИСТЕМЫ ОБРАБОТКИ | 1994 |
|
RU2142157C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ОПЕРАЦИЙ СЧИТЫВАНИЯ В МУЛЬТИПРОЦЕССОРНОЙ КОМПЬЮТЕРНОЙ СИСТЕМЕ | 1998 |
|
RU2183850C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ СВЯЗИ БЕСПРОВОДНОЙ ЛОКАЛЬНОЙ СЕТИ С ПРОВОДНОЙ ЛОКАЛЬНОЙ СЕТЬЮ | 1995 |
|
RU2121762C1 |
| СПОСОБ ПЕРЕДАЧИ ДАННЫХ ОТ ИСТОЧНИКА К ОДНОМУ ИЛИ НЕСКОЛЬКИМ ПРИЕМНИКАМ И СИСТЕМА ИЗОБРАЖЕНИЯ ДАННЫХ | 1992 |
|
RU2120138C1 |
Система связи с последовательными каналами связи включает в себя первый и второй коммутаторы, каждый из которых соединен со множеством устройств, образующих последовательный канал коммуникационной связи между любыми устройствами, соединенными с этим коммутатором. Каждый коммутатор также содержит межкоммутаторное соединение, образующее последовательный канал коммуникационной связи между любым устройством, соединенным с первым коммутатором, и любым устройством, соединенным с вторым коммутатором, а также арбитражную шину, шинный арбитр и множество портов. Технический результат изобретения заключается в создании системы связи с последовательными каналами для соединения двух устройств в системе обработки данных. Это соединение коммуникаций образует продолжающийся коммуникационный канал для образования прямой связи от одного устройства до другого. 1 з.п.ф-лы, 13 ил.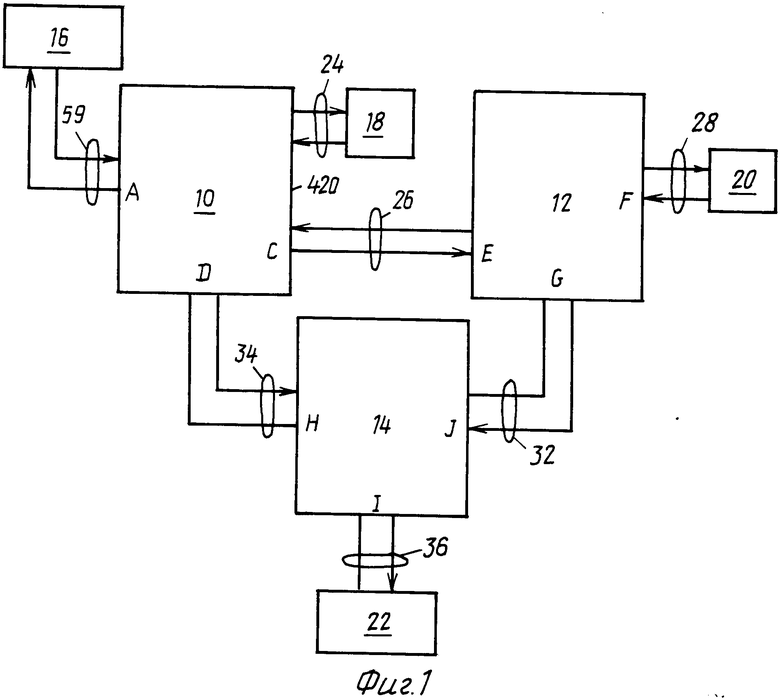
| Лившиц Б.С | |||
| и др | |||
| Развитие системы автоматической коммутации каналов | |||
| - М.: Связь, 1976, c.5 - 6, 78 - 80, 53 - 55 | |||
| SU, авторское свидетельство, 1578838, кл | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
