Изобретение относится к области навигации, в частности к гироприборостроению.
Известен способ построения гироскопов со свободным ротором [1]. Он включает в себя шаровую опору закрытого типа, на которой жестко закреплен дисковидный ротор. Гироскоп снабжен датчиками угла, момента и двигателем.
Недостатком этого способа является невозможность создания больших углов рассогласования между корпусом гидроскопа и ротором (из-за наличия дисковидного ротора), поэтому требуется устанавливать эти гироскопы на стабилизированные гироплатформы, что приводит к усложнению навигационных систем и увеличению их габаритов, в частности этот способ создания гироскопов со свободным ротором не применим для создания бесплатформенных навигационных систем, которые обладают наименьшими массогабаритными параметрами.
Наиболее близким аналогом является способ создания гироскопов со свободным ротором, в которых шаровая опора выполняет роль карданового подвеса, скоростного подшипника ротора и одновременно является ротором гироскопа - носителем кинетического момента (так называемые шаровые гироскопы) [2]. При этом на корпусе гироскопа жестко крепится статор двигателя, на роторе - активная часть двигателя. Этот способ позволяет в принципе создавать гироскопы, работающие при неограниченных углах рассогласования между корпусом и ротором, а следовательно конструировать на их основе бесплатформенные навигационные системы.
Однако недостатком всех существующих шаровых гироскопов, построенных на этом способе, является силовая связь ротора и статора двигателя при их угловых рассогласованиях, в результате чего возникает прецессионное движение ротора, приводящее к совмещению вектора кинетического момента с вектором вращающего момента двигателя, жестко связанным с корпусом гироскопа, т.е. ротор не является свободным, а через некоторое время вновь возвращается в исходное положение, т.е. ротор отслеживает перемещение статора двигателя (корпуса гироскопа).
В работе [2] показано, что углы рассогласования α и β описываются формулами
где
α и β - - углы рассогласования векторов кинетического момента ротора (H) и момента двигателя (Mg) (углы Эйлера);
C1, C2 - постоянные интегрирования, зависящие от начальных условий;
t - текущее время.
Из приведенных формул видно, что ротор шарового гироскопа, будучи отклонен на углы α и β от первоначального положения, когда векторы H и Mg совпадали, через некоторое время (t ≈ 3•H/Mg) в результате возникающего прецессионного движения вновь возвращается к исходному положению.
Таким образом существующий способ построения шаровых гироскопов ограничивает их точность скоростью прецессии ω = Mg/H. В реальных шаровых гироскопах эта скорость прецессии составляет величину не менее 5•10-2 oC5•10-3 о/ч на дуг. с угла рассогласования. Из-за этой связи необходимо шаровые гироскопы устанавливать на гиростабилизированные платформы, погрешность работы которых в настоящее время не удается снизить менее 1 дуг. с.
Для устранения этого недостатка предлагается способ повышения точности шарового гироскопа, при котором при угловых разворотах ротора относительно его корпуса вектор вращающего момента двигателя совмещается с вектором кинетического момента, для чего на корпус гироскопа жестко устанавливаются три статора двигателя, расположенные в трех взаимоперпендикулярных плоскостях, которые вырабатывают моменты вращения ротора, пропорциональные соответствующим углам рассогласования корпуса и ротора гироскопа, причем модуль вращающего момента двигателей постоянен, а вектор его совпадает с вектором кинетического момента ротора. Таким образом вектор вращающего момента двигателя (статор двигателя) следит за положением ротора гироскопа в пространстве (т.е. в идеале углы α и β отсутствуют).
Для выполнения этих условий необходимо, чтобы статор, создающий момент вращения вокруг оси X (см. чертеж), управлялся по закону: Mx = Mg•cos α •cos β , а статоры, создающие моменты вращения вокруг осей Y, Z, - по законам
или
Сигналы, пропорциональные углам рассогласования α.β. снимаются датчиками углов гироскопа, усиливаются и через известные синусо-косинусные устройства подаются в трехканальный блок питания двигателя (которые не являются предметом настоящего изобретения), вырабатывающий моменты по вышеуказанным законам.
Таким образом на ротор действует вращающийся момент M, постоянный по модулю
или что то же самое
и всегда совпадающий с вектором H при любых углах α и β с точностью до погрешности съема этих углов, которая у современных датчиков угла составляет десятые и даже сотые доли дуговой секунды.
Таким образом точность шаровых гироскопов можно увеличить до
т.е. на 1 - 2 порядка.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1999 |
|
RU2157965C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ И УГЛОВОЙ СКОРОСТЕЙ И УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2097700C1 |
| СПОСОБ ОРИЕНТАЦИИ ПОЛЯРНОГО ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА КОРАБЕЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2006 |
|
RU2308004C1 |
| ГИРОИНТЕГРАТОР ЛИНЕЙНЫХ УСКОРЕНИЙ | 1995 |
|
RU2097701C1 |
| СПОСОБ АВТОКОМПЕНСАЦИИ УХОДОВ ЭЛЕКТРОСТАТИЧЕСКОГО ГИРОСКОПА | 2005 |
|
RU2296298C1 |
| ЭЛЕКТРОСТАТИЧЕСКИЙ ГИРОСКОП | 1999 |
|
RU2173446C2 |
| СПОСОБ КАЛИБРОВКИ УГЛОВ РАССОГЛАСОВАНИЯ ОСИ ДАТЧИКА УГЛА НЕУПРАВЛЯЕМОГО ГИРОСКОПА ОТНОСИТЕЛЬНО ОСИ ВРАЩЕНИЯ ЕГО КОРПУСА | 2005 |
|
RU2308683C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВОЙ СКОРОСТИ ГИРОПЛАТФОРМЫ | 1996 |
|
RU2106601C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА ПОДВОДНОГО АППАРАТА | 1997 |
|
RU2123665C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КУРСА ОБЪЕКТА И САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОУКАЗАНИЯ | 2000 |
|
RU2186338C1 |
Способ предназначен для использования в гироприборостроении в области навигации. Вектор вращающего момента ротора гироскопа всегда совмещается с вектором конического момента при любых углах их рассогласования. Для этого на корпусе гироскопа жестко устанавливают три статора двигателя, расположенные в трех взаимно перпендикулярных плоскостях. Статоры вырабатывают моменты вращения ротора, пропорциональные соответствующим углам рассогласования корпуса и ротора гироскопа, таким образом, что модуль вращающего момента постоянен, а его вектор совпадает с вектором кинетического момента, что повышает точность шаровых гироскопов. 1 ил.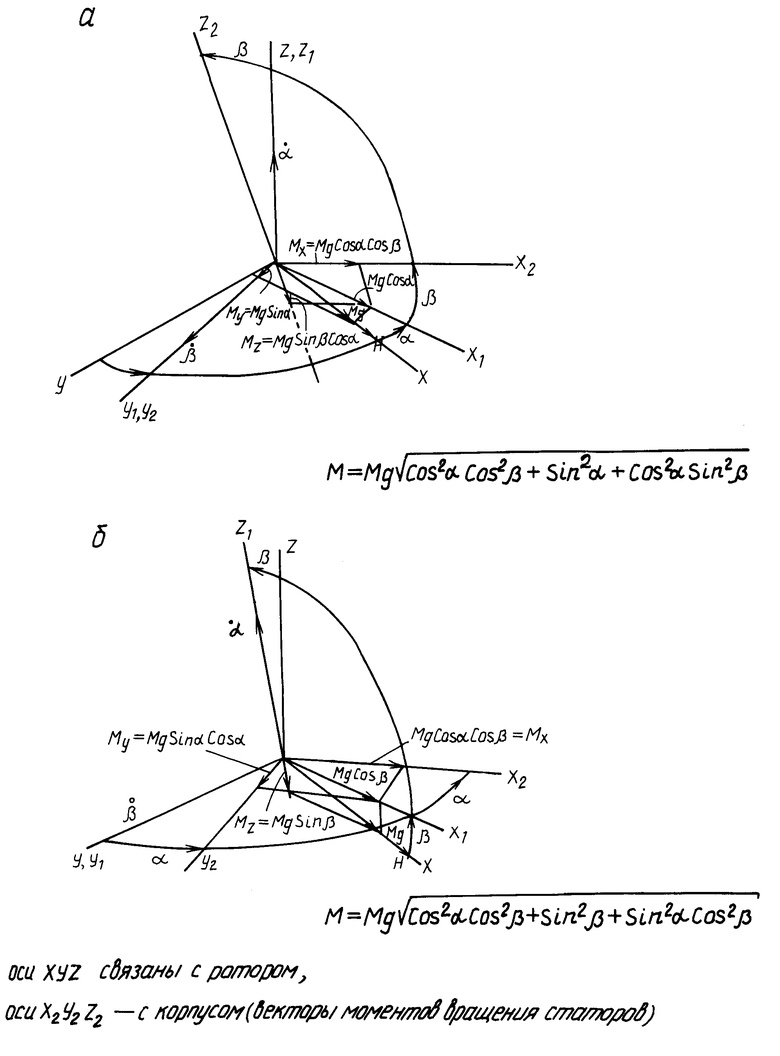
Способ повышения точности шаровых гироскопов, отличающийся тем, что на корпусе гироскопа жестко устанавливают три статора двигателя по трем взаимно перпендикулярным осям, при угловых разворотах ротора гироскопа относительно его корпуса статоры вырабатывают составляющие моменты вращения ротора, пропорциональные соответствующим углам рассогласования между ротором и корпусом, при которых модуль вращающего момента двигателя постоянен, а его вектор совпадает с вектором кинетического момента ротора гироскопа.
| Веннерхолм | |||
| Гироскоп со свободным ротором | |||
| Вопросы ракетной техники, N 7, 1967 | |||
| Павлов В.А | |||
| Основы проектирования и расчета гироскопических приборов | |||
| - Л.: Судостроение, 1967, с | |||
| Прибор для запора стрелок | 1921 |
|
SU167A1 |

