Изобретение относится к области точного приборостроения, а именно к гироприборостроению, и может быть использовано для создания прецизионных гироскопических навигационных систем.
Известны динамически настраиваемые гироскопы - ДНГ (см. Динамически настраиваемые гироскопы. Д.С. Пельпор, В.А. Матвеев, В.Д. Арсеньев. "Машиностроение". Москва, 1982 г. ), в которых упругий момент подвеса (К) при отклонении ротора от нулевого положения уравновешивается динамическим моментом колец подвеса (IΩ2), т.е. осуществляется так называемая динамическая настройка гироскопа, при которой K = I • Ω2, где I - момент инерции колец подвеса, Ω - угловая скорость вращения ротора.
Недостатком этих гироскопов является применение в них шарикоподшипниковой опоры ротора, генерирующей широкий спектр собственных частот, некоторые из которых могут совпадать с собственной частотой подвеса, что вызывает резкое снижение точности гироскопа.
Известен ДНГ, имеющий газодинамическую опору (ГДО) ротора (G.Beardmore. The design and development of a novel strapdown DTG incorporating a gas bearing and fabricated flexure hinge. DGON, Simposium Gyro Technology, 1984, Germany, Stuttgart, p.p.120-1233), которая имеет низкий уровень собственных вибраций по сравнению с шарикоподшипниковой опорой. В этом гироскопе для снижения демпфирования собственных колебаний колец подвеса применяется пониженное давление воздуха.
Недостатком этого гироскопа является наличие газа, соприкасающегося с элементами подвеса и хоть в ослабленной степени, но производящим демпфирование их колебаний. Устранить газовую среду из этого гироскопа невозможно, поскольку она является смазкой ГДО, без которой эта опора в принципе неработоспособна. Понижение давления газа ухудшает несущую способность ГДО, что приводит к уменьшению надежности этих гироскопов. Поэтому эта конструкция ДНГ может быть применима только к гироскопам c малой массой ротора, и, следовательно, с малым кинетическим моментом, т.е. гироскопам малой и средней точности.
Для повышения точности ДНГ и устранения вышеотмеченных недостатков предлагается динамически настраиваемый гироскоп, содержащий корпус крышки, вращающийся карданов подвес с маховиком, двигатель, датчики углов и моментов, газодинамическую опору, отличающийся тем, что маховик ротора с подвесом заключены в герметичный кожух, внутри которого создается вакуум, причем между кожухом и маховиком с подвесом имеется зазор, обеспечивающий свободу углового перемещения маховика с подвесом относительно кожуха вокруг осей подвеса, при этом внутренний объем гироскопа, в котором размещена ГДО, заполняется газом под высоким давлением.
На чертеже изображен общий вид предлагаемого гироскопа. Гироскоп состоит из корпуса 1, двух крышек 2, герметично соединенных с корпусом 1, в которых неподвижно закреплены статоры двигателя 3 и неподвижные элементы газодинамических опор 4, вала 5, на котором неподвижно закреплены: вращающиеся элементы газодинамических опор - полусферы 6, роторы электродвигателя 7, упругий подвес 8 с маховиком 9. К валу 5 герметично крепится кожух 10, изготавливаемый, как правило, из немагнитного материала, при этом для обеспечения свободы углового перемещения маховика 9 с подвесом 8 между ними и кожухом 10 обеспечивается необходимый зазор. Кожух 10 снабжается ниппелем 11 для откачки до высокого вакуума и последующей герметизации внутреннего объема, в котором размещены подвес 8 и маховик 9. На маховике 9 неподвижно закреплены роторы (кольцевые постоянные магниты) 12 датчиков момента, статоры 13 которых неподвижно закреплены на крышках 2, на которых также неподвижно крепятся и статоры 14 датчиков угла. Ротором датчика угла служит маховик 9. Гироскоп герметизируется заглушками 15, на одной из которых имеется ниппель 16, через который обезгаживается и заполняется газом (обычно водородом или гелием) внутренний объем гироскопа. Этот газ является смазкой газодинамических опор и служит одновременно теплоотводом от внутренних источников тепла. На крышках 2 располагается также необходимое количество гермовыводов 17.
Работа гироскопа происходит следующим образом. При подаче напряжения на статоры 3 роторы 7 двигателя начинают вращаться вместе c валом 5 и размещенными на нем полусферами 6 ГДО, подвесом 8, маховиком 9 и кожухом 10.
При разворотах гироскопа в инерциальном пространстве относительно осей, не совпадающих с осью вращения двигателя, происходит угловое рассогласование маховика 9 относительно корпуса 1, при этом на сигнальных обмотках статоров датчиков угла 14 появляются сигналы, пропорциональные углам рассогласования. Эти сигналы усиливаются, преобразуются (преобразователи не показаны) и подаются в статоры 13 датчиков момента гироскопа либо на соответствующие двигатели стабилизации (при использовании гироскопов в стабилизированных платформах), которые вырабатывают моменты, стремящиеся свести углы рассогласования к нулю. Поскольку в объеме, заключенном внутри кожухов 10, создан глубокий вакуум, на подвес 8 и маховик 9 не действуют демпфирующие и упругие моменты, вызванные наличием газовой среды и приводящие к значительным погрешностям ДНГ.
Таким образом, предлагаемый гироскоп по сравнению с прототипом обладает повышенной точностью и надежностью за счет работы подвеса и маховика в вакууме, а газодинамической опоры при высоком давлении газа.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2248524C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 2004 |
|
RU2282825C2 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1988 |
|
RU2101679C1 |
| ОСЕВОЙ КОМПЕНСАЦИОННЫЙ ЦИФРОВОЙ АКСЕЛЕРОМЕТР С НЕКОНТАКТНЫМ ПОДВЕСОМ ИНЕРЦИОННОЙ МАССЫ | 1997 |
|
RU2128345C1 |
| ТРЕХСТЕПЕННЫЙ ГИРОСКОП | 1996 |
|
RU2119146C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1977 |
|
RU2107260C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ В СОСТАВЕ ГИРОСТАБИЛИЗАТОРА ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА И ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1990 |
|
RU2120109C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ШАРОВЫХ ГИРОСКОПОВ | 1996 |
|
RU2118794C1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ДВИГАТЕЛЬ ГИРОСКОПА | 1996 |
|
RU2118795C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ С ТРЕХКРАТНОЙ МОДУЛЯЦИЕЙ ПОЛЕЗНОГО СИГНАЛА НА БАЗЕ МОДУЛЯЦИОННОГО ГИРОСКОПА С ИНДУКЦИОННЫМ ИЗМЕРИТЕЛЕМ МОДУЛЯЦИИ | 2008 |
|
RU2389031C1 |
Гироскоп предназначен для использования в области точного гироприборостроения. Гироскоп с газодинамическими опорами ротора содержит подвес и маховик, заключенные в герметичный кожух, внутри которого создается вакуум. Между кожухом и маховиком с подвесом имеется зазор, обеспечивающий свободу углового перемещения маховика относительно кожуха вокруг осей подвеса. Внутренний объем гироскопа, в котором размещена опора, заполняется газом под высоким давлением. Это позволяет улучшить точность гироскопа, поскольку исключаются вредные моменты демпфирования, действующие на ротор при наличии газовой среды, и повысить его надежность, так как опора работает при высоком давлении газа. 1 ил.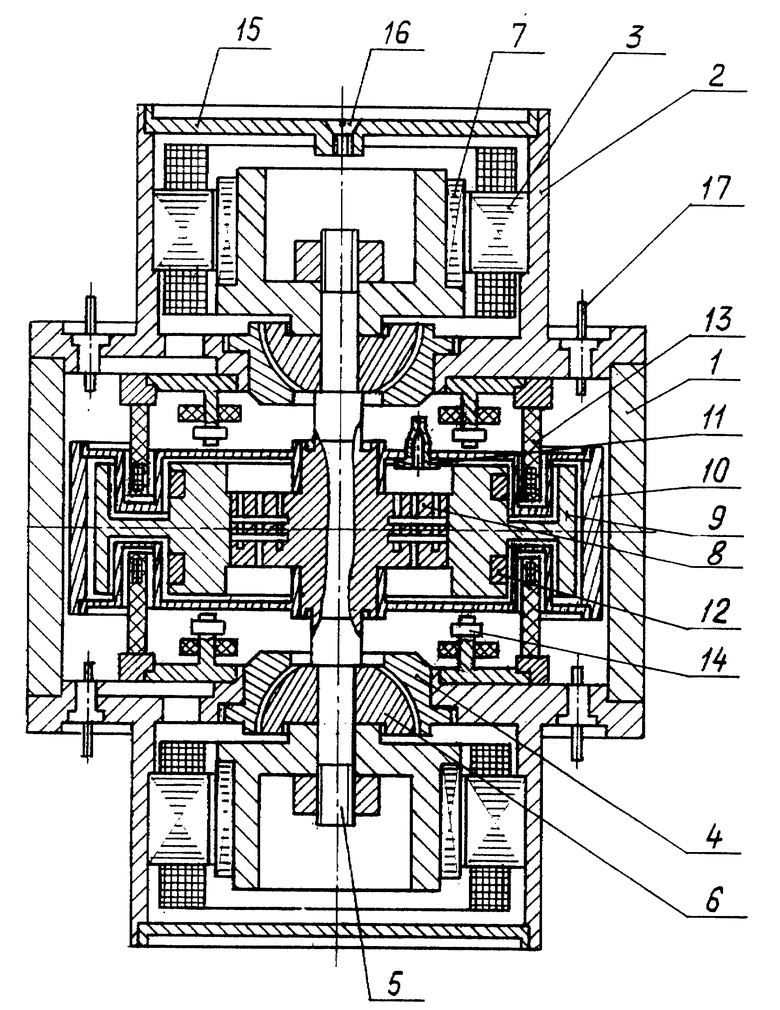
Динамически настраиваемый гироскоп, содержащий корпус, крышки, вращающийся карданов подвес с маховиком, двигатель, датчики углов и моментов, газодинамическую опору, отличающийся тем, что маховик ротора с подвесом заключены в герметичный кожух, внутри которого создается вакуум, причем между кожухом и маховиком с подвесом имеется зазор, обеспечивающий свободу углового перемещения маховика с подвесом относительно кожуха вокруг осей подвеса, при этом внутренний объем гироскопа, в котором размещена газодинамическая опора, заполняется газом под высоким давлением.
| Beardmore G | |||
| The design and development of a novel strapdown, DTG incorporating a gas bearing and fabricated flexure hinge | |||
| DGON, Simposium Gyro Technology, 1984, pp | |||
| Кровля из глиняных обожженных плит с арматурой из проволочной сетки | 1921 |
|
SU120A1 |
| и др | |||
| Динамически настраиваемые гироскопы | |||
| - М.: Машиностроение, 1988, с.226-232, с.155-192 | |||
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1980 |
|
RU2101678C1 |
| ДИНАМИЧЕСКИ НАСТРАИВАЕМЫЙ ГИРОСКОП | 1977 |
|
RU2107260C1 |
| DE 4005274 А1, 22.08.1991 | |||
| US 3468170, 23.09.1969. | |||

