Изобретение относится к системам оценки полета летательного аппарата и может быть использовано для оценки техники пилотирования летчиком, полноты и качества выполненного полетного задания, для обучения летчиков, для установления и анализа причин летных происшествий.
Известен имитатор режимов полета, содержащий декодирующее устройство, состоящее из лентопротяжного механизма и преобразующего устройства, подключенный к его выходам блок усиления и согласования, подключенные к выходам последнего имитаторы приборов индикации параметров полета, органы управления реле и силовой установкой летательного аппарата, расположенных в макете кабины [1]. Из-за применения блока усиления и согласования имитатор режимов полетов не обеспечивает воспроизведения полного информированного образа полета, а из-за применения в нем преобразующего устройства в качестве преобразователя кодированных сигналов параметров в их физические значения имеет низкую точность контроля состояния объекта и большую трудоемкость при подготовке полетной информации к воспроизведению.
Наиболее близким техническим решением является комплексный тренажер летательного аппарата, содержащий управляющий цифровой вычислительный комплекс, блоки ввода/вывода, соединенные через блоки ввода/вывода с управляющим цифровым вычислительным комплексом индикаторные устройства, исполнительные элементы имитаторов и систем тренажера [2].
Комплексный тренажер летательного аппарата недостаточно обеспечивает безопасность полетов по следующим причинам:
- из-за отсутствия соединения между управляющим цифровым вычислительным комплексом и устройством воспроизведения кодированной полетной информации;
- из-за наличия соединения датчиков органов управления летательным аппаратом, установленных в макете кабины, через блоки ввода с управляющим цифровым вычислительным комплексом;
- из-за формирования информационного образа в полете в результате обработки управляющим цифровым вычислительным комплексом с датчиков органов управления по несовершенным алгоритмам математических моделей динамики движения и работы систем бортового оборудования летательного аппарата, что понижает точность воспроизведения статических характеристик на 10%;
- из-за выводов параметров на индикацию только лишь после обработки всего алгоритма математических моделей, что понижает точность воспроизведения динамических характеристик на 20-25%; не обеспечивает повышения эффективности совместного использования тренажера и бортового регистратора летательного аппарата в деле повышения уровня безопасности полетов и имеет низкую точность воспроизведения информационного образа полета в реальном масштабе времени.
Техническим результатом, который может быть получен при осуществлении изобретения, является повышение уровня безопасности полетов за счет повышения эффективности совместного использования комплексного тренажера и бортового регистратора летательного аппарата при повышенной точности воспроизведения информационного образа полета в реальном масштабе времени.
Технический результат достигается тем, что комплексная система воспроизведения полетной информации на тренажере летательного аппарата, содержащая управляющий цифровой вычислительный комплекс, выходы которого через блоки вывода подключены к индикаторным устройствам и исполнительным элементам имитаторов и систем тренажера, дополнительно введены взаимосвязанные между собой блок ввода полетной информации и устройство воспроизведения полетной информации, последовательно соединенные устройство внешней памяти на магнитных дисках взаимосвязанный с управляющим цифровым вычислительным комплексом, блок приема полетной информации и блок управления выводом, выход которого соединен с входом управляющего цифрового вычислительного комплекса, последовательно соединенные блок декодирования кадра, вход которого соединен с выходом блока приема полетной информации, блок упаковки разовых команд и блок формирования результирующего кадра, выход которого подключен ко второму входу блока управления выводом, выход которого соединен с четвертым входом блока формирования результирующего кадра, последовательно соединенные первый блок масштабирования, вход которого соединен со вторым выходом блока декодирования кадра, блок фильтрации и второй блок масштабирования, выход которого подключен ко второму входу блока формирования результирующего кадра, третий вход которого соединен с третьим выходом блока декодирования кадра, при этом блок ввода полетной информации взаимосвязан с управляющим цифровым вычислительным комплексом.
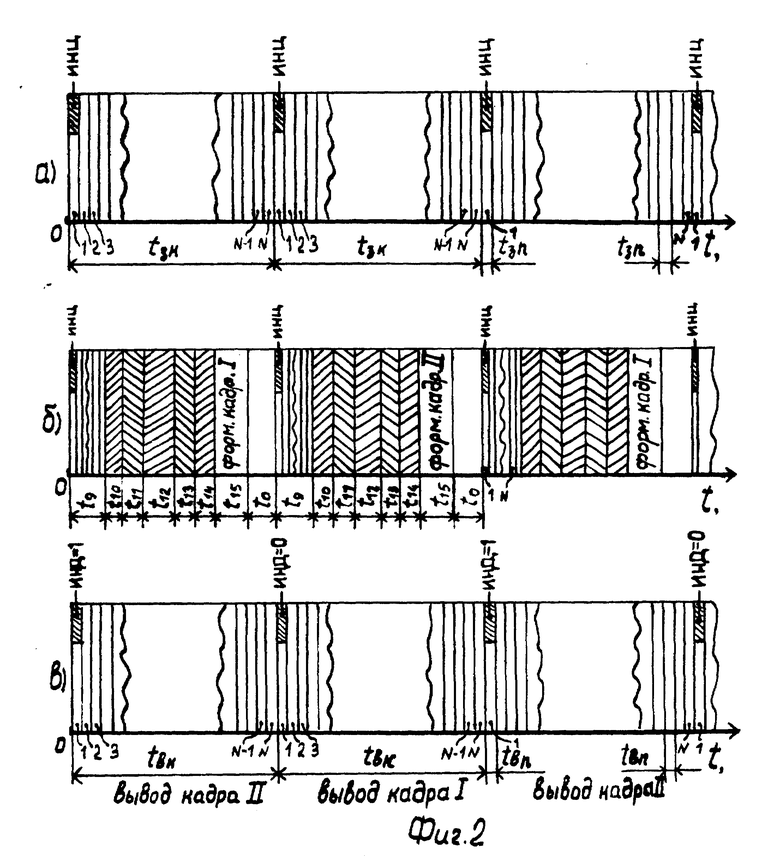
На фиг. 1 представлена блок схема комплексной системы воспроизведения полетной информации на тренажере летательного аппарата; на фиг. 2 представлены временные диаграммы работы комплекса.
Комплексная система воспроизведения полетной информации на тренажере летательного аппарата (фиг. 1) содержит устройство 1 воспроизведения полетной информации, блок 2 ввода полетной информации, управляющий цифровой вычислительный комплекс 3, блоки 4 вывода, индикаторные устройства 5, исполнительные элементы имитаторов 6 и систем 7 тренажера, устройство 8 внешней памяти на магнитных дисках, блок 9 приема полетной информации, блок 10 декодирования кадра, блок 11 упаковки разовых команд, первый блок 12 масштабирования, блок 13 фильтрации, второй блок 14 масштабирования, блок 15 формирования результирующего кадра и блок 16 управления выводом. Индикаторные устройства 5 представляют собой совокупность приборов, указателей, световых табло и устройств речевой информации. Имитаторы 6 тренажера представляют собой устройства, имитирующие шумы, вибрацию, тряску, внешнюю визуальную обстановку, действия противоперегрузочного костюма и т.д. К системам 7 тренажера относятся прицельно-навигационные комплексы, органы управления летательным аппаратом, расположенные в кабине тренажера, графопостроитель маршрута. Блоки 4 вывода представляют собой преобразователи типа код-ток вывода "аналоговых" параметров и модули контактные, бесконтактные, импульсные для вывода разовых команд. "Аналоговый" параметр представляет собой совокупность значений в цифровом виде, зафиксированных в конкретные моменты времени датчиком и записанных бортовым регистратором. Разовая команда определяется уровнем сигнала "логическая единица" или "логический ноль", записанным бортовым регистратором соответственно, если разовая команда имела место или нет.
Комплексная система работает следующим образом.
Управляющий цифровой вычислительный комплекс 3 выдает на блок 2 ввода полетной информации код команды "Воспроизведение". По этой команде блок 2 формирует и выдает в устройство воспроизведения полетной информации 1 сигнал включения. Устройство воспроизведения полетной информации 1 воспроизводит кодированные сигналы, записанные в цифровом виде бортовым регистратором во время выполнения реального полета летательным аппаратом с датчиков бортового оборудования. Бортовой регистратор циклически записывает номер параметров в соответствии с таблицей записи параметров в течение времени записи кадра.
где tзп - время записи каждого параметра, определяющееся характеристиками бортового регистратора.
Кадр записи начинается параметром самоконтроля работы регистратора, с которым записывается метка кадр-импульс начала цикла (ИНЦ=1, фиг. 2a). Блок 2 ввода полетной информации принимает от устройства воспроизведения полетной информации 1 в ускоренном темпе кодированные сигналы параметров, согласует и передает их в управляющий цифровой вычислительный комплекс 3, который накапливает поступающую полетную информацию на магнитных дисках устройства внешней памяти на магнитных дисках 8. Темп ввода полетной информации определяется характеристиками устройства воспроизведения полетной информации 1 и на порядок как минимум выше темпа записи бортовым регистратором, то есть реального масштаба времени. Ввод полетной информации прекращается по команде "Стоп" с управляющего цифрового вычислительного комплекса 3. По этой команде блок 2 вырабатывает сигнал для останова устройства воспроизведения полетной информации 1 и прекращает передачу полетной информации.
Воспроизведение полетной информации на тренажере летательного аппарата начинается с включения управляющим цифровым вычислительным комплексом 3 устройства внешней памяти на магнитных дисках 8. Блок приема полетной информации 9 принимает полетную информацию с устройства внешней памяти на магнитных дисках 8 и в потоке информации анализирует место нахождения метки кадра ИНЦ. По нахождению ИНЦ блок 9 записывает в течение времени t9 кадр размерностью N параметров, фиг. 2б. В начале записи кадра блок 9 передает с первого выхода сигнал, соответствующий уровню "логическая единица" (по метке кадра ИНЦ) на первый вход блока 16. По этому сигналу блок 16 выставляет управляющий параметр "индекс", равный единице (ИНД=1), фиг. 2в, и передает его на четвертый вход блока 15. По управляющему параметру ИНД=1 блок 16 принимает на свой второй вход обработанные параметры результирующего кадра 11 с выхода блока 15, а блок 15 формирует результирующий кадр 1, фиг. 2б, в. По следующему сигналу "логическая единица" на первом входе блока 16 последний выставляет управляющий параметр в ноль (ИНД=0), и также передает его на четвертый вход блока 15. По управляющему параметру ИНД=0 блок 16 принимает на свой второй вход обработанные в предыдущем цикле параметры результирующего кадра 1 с выхода блока 15, блок 15 формирует результирующий кадр 11, фиг. 2б, в. В формировании результирующего кадра принимают участие блоки 10, 11, 12, 13, 14, 15. После записи кадра полетной информации в блок 9 последний передает его в блок 10. Блок 10 декодирует кадр полетной информации в соответствии с таблицей записи параметров бортовым регистратором. Происходит выделение параметров в последовательности: разовые команды, служебные параметры (время в часах, минутах, секундах от момента включения на летательном аппарате бортового регистратора, номер летательного аппарата, номер вылета, дату вылета), "аналоговые" параметры. Декодирование осуществляется в течение времени t10, после чего блок 10 передает разовые команды в блок 11, служебные параметры на третий вход блока 15 и "аналоговые" параметры в блок 12, фиг. 2б.
Блок 11 сортирует разовые команды по группам в соответствии с их функциональным назначением, например разовые команды, обслуживающие силовые установки летательного аппарата, разовые команды включения органов управления и посадки летательным аппаратом, разовые команды работы прицельно-навигационного комплекса и т. п. Затем разовые команды упаковываются по группам в управляющие слова USRK. USRK представляют собой совокупность информационной части управляющего слова, в каждый из которых записывается значение "логическая единица", если разовая команда имела место в данный момент, и "логического нуля", если нет. По завершении операций упаковки блок 11 передает массив USRK на первый вход блока 15. Блок 11 работает в течение времени t11, фиг. 2б. Блок 12, получив со второго выхода блока 10 "аналоговые" параметры, в течение времени t12, фиг. 2б, преобразует их кодированные сигналы в физические значения согласно выражению
FZ=K1•KS,
где FZ - физическое значение параметра в цифровом виде;
KS - кодированный сигнал параметра в цифровом виде;
K1 - коэффициент параметра, значение которого определяется типом бортового регистратора, характером физического изменения его величины.
блок 13 фильтрует в течение времени t13 (фиг. 2б) физические значения параметров, записанные бортовым регистратором в результате кратковременных сбоев в работе бортового оборудования летательного аппарата согласно выражению
FZ*(i)=[7•FZ(i)+6•(FZ(i-1)+FZ(i+1))+3•(FZ(i-2)+FZ(i+2))-2•(FZ(i-3)+FZ(i+3))]:21,
где i - номер физического значения параметра в кадре. Физическое значение параметра блок 13 определяет сбойным на основании выражения
Δ > Δзад,
где Δзад - максимальное приращение параметров за интервал времени t
Δt = ti-ti-1,
определяется скоростью измерения параметра в единицу времени для данного летательного аппарата.
По завершении фильтрации блок 13 передает значение FZ* в блок 14. Блок 14 в течение времени t14, фиг. 2б, преобразует физические значения параметров в управляющие слова параметров USP согласно выражению
USP=K2(FZ*:FZmax),
где K2 - коэффициент, определяющий максимальное значение информационной части управляющего слова параметра, определяется возможностями управляющего цифрового вычислительного комплекса 3;
FZmax - максимальное физическое значение параметра.
По завершении масштабирования 11 блок 14 передает служебные параметры на второй вход блока 15.
Блок 15 принимает на третий вход служебные параметры, по которым вычисляет время вывода одного параметра tвп, фиг. 2б, на индикацию согласно выражениям
tвк=tj-tj-1,
tвп=tвк:N,
где tвк - время вывода кадра размерностью N (фиг. 2в);
tj, tj-1 - единицы времени, записанные бортовым регистратором, как служебные параметры, в j и j-1 кадры.
Значение tвп блок 15 записывает в первое слово результирующего кадра 1 или 11, в зависимости от значения "индекса". Затем блок 15 формирует управляющие слова разовых команд, служебных параметров, "аналоговых" параметров согласно выражению
US=USRK+ADR
или
US=USP+ADR
или
US=USSP+ADR
где
ADR - адрес подключения к управляющему цифровому вычислительному комплексу 3 блока 4;
USSP - управляющее слово служебного параметра.
В зависимости от значения "индекса" (ИНД) блок 15 записывает управляющие слова US в соответствии с таблицей, записи параметров в кадр бортовым регистратором, в результирующий кадр. Блок 15 работает в течение времени t15, фиг. 2б время t0, фиг. 2б, является резервным и не используется для обработки.
Блок 16, получив на свой второй вход с выхода блока 15 результирующий кадр 1 или 11, в соответствии со значением управляющего параметра индекс (ИНД= 1, ИНД= 0), начинает передавать параметры со своего второго выхода на вход управляющего цифрового вычислительного комплекса 3, поочередное, через время вывода параметра tвп, фиг. 2в. Управляющий цифровой вычислительный комплекс 3, приняв очередное управляющее слово US, анализирует адресную часть ADR и по значению ADR направляет информационную часть управляющего слова (USRK, USP, USSP) на соответствующий блок 4 вывода. Блок 4 преобразует информационную часть из цифрового вида в электрический сигнала и передает этот сигнал на индикаторные устройства 5, исполнительные элементы имитаторов 6 или систем 7 тренажера. Служебные параметры выводятся управляющим цифровым вычислительным комплексом 3 на экраны мониторов для идентификации конкретного вылета летательного аппарата. Одновременно с выводом параметров управляющий цифровой вычислительный комплекс 3 по значению времени находит на магнитном диске устройства внешней памяти на магнитных дисках 8 место расположения очередного j+1 кадра полетной информации. С этого места блок 9 в следующем цикле начинает прием полетной информации. На магнитных дисках, кроме полетной информации, хранится следующая информация, необходимая для работы комплексной системы:
- таблица записи параметров бортовым регистратором;
- количество параметров в кадре полетной информации N;
- таблица упаковки разовых команд;
- коэффициент параметров K1 в виде тарировочных таблиц;
- заданное максимальное приращение параметров Δзад;
- коэффициент, определяющий максимальное значение информационной части управляющего слова параметра K2;
- максимальное физическое значение параметра FZmax;
- адрес подключения блоков 4 вывода к управляющему цифровому вычислительному комплексу 3 ADR. Эти данные вводятся оператором через управляющий цифровой вычислительный комплекс на магнитные диски.
Литература
1. Авт.св. СССР N 374015, кл. C 09 B 9/08, 1971.
1. Техническое описание КТС-21 412.000.562 ТО, книга 1.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВИАЦИОННЫЙ ТРЕНАЖЕР МОДУЛЬНОЙ КОНСТРУКЦИИ | 2004 |
|
RU2247430C1 |
| СПОСОБ ВЫПОЛНЕНИЯ ТРЕНИРОВОЧНОГО ПОЛЕТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2156501C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2011 |
|
RU2488775C1 |
| КОМПЛЕКС УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМИ АППАРАТАМИ | 2004 |
|
RU2270471C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЗЕРВНОГО ВОЗВРАТА ОДНОМЕСТНОГО БОЕВОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ОТКАЗЕ ЦЕНТРАЛЬНОГО ВЫЧИСЛИТЕЛЯ | 2023 |
|
RU2807539C1 |
| СИСТЕМА ОБРАБОТКИ ПОЛЕТНОЙ ИНФОРМАЦИИ | 2000 |
|
RU2169394C1 |
| УЧЕБНО-ТРЕНИРОВОЧНЫЙ КОМПЛЕКС АВИАЦИОННЫЙ | 2004 |
|
RU2250511C1 |
| УСТРОЙСТВО ИМИТАЦИИ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА ДЛЯ ОТРАБОТКИ ПРОГРАММНОГО И АППАРАТНОГО ОБЕСПЕЧЕНИЯ ПОЛЁТНОГО КОНТРОЛЛЕРА | 2023 |
|
RU2799166C1 |
| СПОСОБ УПРАВЛЕНИЯ БОРТОВЫМ ОБОРУДОВАНИЕМ МНОГОФУНКЦИОНАЛЬНОГО ОДНОМЕСТНОГО БОЕВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2828758C1 |
Использование: комплексная система воспроизведения полетной информации на тренажере летательного аппарата относится к системам оценки летательного аппарата и может быть использована для оценки техники пилотирования летчиком, полноты и качества выполненного полетного задания, для обучения летчиков, для установления и анализа причин летных происшествий. Сущность изобретения: комплексная система воспроизведения полетной информации на тренажере летательного аппарата содержит управляющий цифровой вычислительный комплекс 3, выходы которого через блоки 4 вывода подключены к индикаторным устройствам 5 и исполнительным элементам имитаторов 6 и систем 7 тренажера. В систему дополнительно введены взаимосвязанные между собой блок 2 ввода полетной информации, и устройство 1 воспроизведения полетной информации, последовательно соединенные устройство 8 внешней памяти на магнитных дисках взаимосвязанных с управляющим цифровым вычислительным комплексом, блок 9 приема полетной информации и блок 16 управления выводом, выход которого соединен с входом управляющего цифрового вычислительного комплекса 3, последовательно соединенные блок 10 декодирования кадра, вход которого соединен с выходом блока 9 приема полетной информации, блок II упаковки разовых команд и блок 15 формирования результирующего кадра, выход которого подключен ко второму входу блока 16 управления выводом, выход которого соединен с четвертым входом блока 15 формирования результирующего кадра, последовательно соединенные первый блок 12 масштабирования, вход которого соединен со вторым выходом блока 10 декодирования кадра, блок 13 фильтрации и второй блок 14 масштабирования, выход которого подключен ко второму входу блока 15 формирования результирующего кадра, третий вход которого соединен с третьим выходом блока 10 декодирования кадра, при этом блок 2 ввода полетной информации взаимосвязан с управляющим цифровым вычислительным комплексом 3. 2 ил.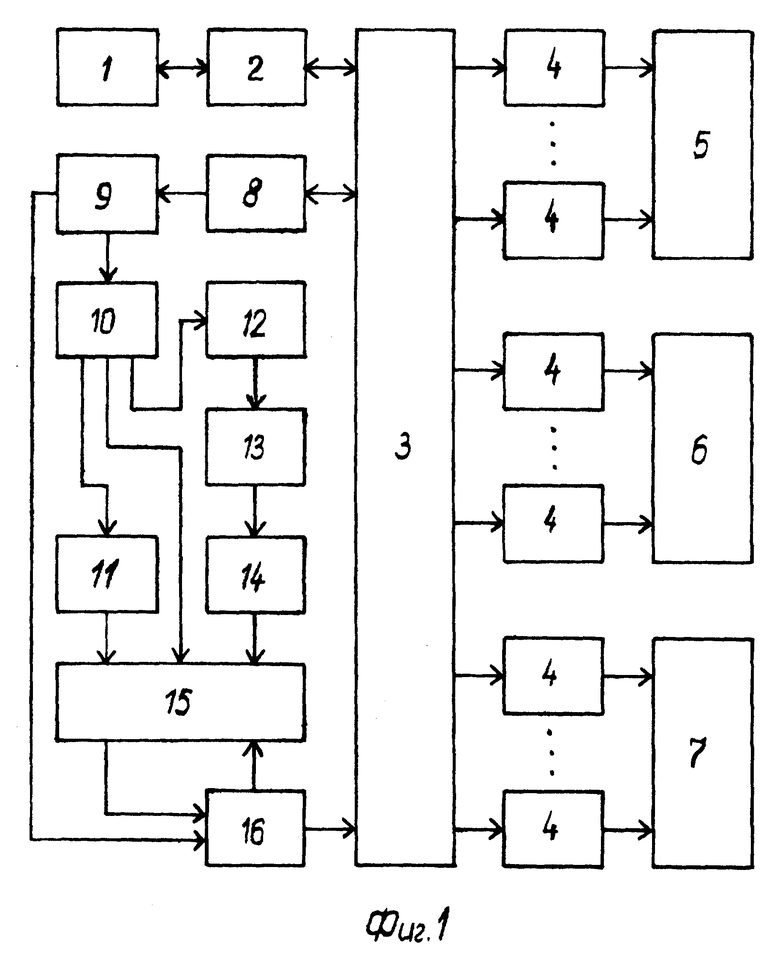
Комплексная система воспроизведения полетной информации на тренажере летательного аппарата, содержащая управляющий цифровой вычислительный комплекс, выходы которого через блоки вывода подключены к индикаторным устройствам и исполнительным элементам имитаторов и систем тренажера, отличающаяся тем, что в нее введены взаимосвязанные между собой блок ввода полетной информации и устройство воспроизведения полетной информации, последовательно соединенные устройство внешней памяти на магнитных дисках, взаимосвязанный с управляющим цифровым вычислительным комплексом, блок приема полетной информации и блок управления выводом, выход которого соединен с входом управляющего цифрового вычислительного комплекса, последовательно соединенные блок декодирования кадра, вход которого соединен с выходом блока приема полетной информации, блок упаковки разовых команд и блок формирования результирующего кадра, выход которого подключен ко второму входу блока управления выводом, выход которого соединен с четвертым входом блока формирования результирующего кадра, последовательно соединенные первый блок масштабирования, вход которого соединен со вторым выходом блока декодирования кадра, блок фильтрации и второй блок масштабирования, выход которого подключен ко второму входу блока формирования результирующего кадра, третий вход которого соединен с третьим выходом блока декодирования кадра, при этом блок ввода полетной информации взаимосвязан с управляющим цифровым вычислительным комплексом.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| SU, авт | |||
| св | |||
| N 374015 по кл | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |

