Предлагаемое решение относится к авиации и может быть использовано при индивидуальных полетах в атмосфере.
Известны дельтаплан и способ управления его полетом (В.А.Жеглов, В.Б. Рыбкин и др. "Учись летать на дельтаплане", М., ДОСААФ СССР, 1980 г., стр. 80, стр. 60 - 72).
Конструкция дельтаплана содержит выполненный из стержневых элементов каркас, на верхней части которого установлена горизонтально аэродинамическая плоскость, имеющая в плане вид равнобедренного треугольника. Вершина этого треугольника обращена в направлении полета.
К каркасу присоединена минимум одна гибкая связь (ремень, трос, или т.п. ), на которой в процессе полета закреплен пилот. Он находится около некоторых из стержней каркаса и может с ними взаимодействовать своими руками или ногами.
Дельтаплан эксплуатируют следующим образом. Пилот закрепляет на себе один конец гибкой связи, второй конец которой закреплен на дельтаплане, в центре его тяжести. Затем, удерживая дельтаплан на весу за счет удержания его руками стержней каркаса и развернув его так, чтобы вершина равнобедренного треугольника аэродинамической плоскости была бы обращена в направлении будущего старта (полета), пилот разбегается в указанном направлении и прыгает с обрыва или взлетает со склона вперед-вниз.
Горизонтальная аэродинамическая плоскость дельтаплана обеспечивает ему полет в планирующем режиме. При этом пилот висит на гибкой связи и его центр тяжести находится на вертикали, на которой находится центр тяжести дельтаплана. Для изменения направления полета вправо или влево или изменения скорости пилот, висящий под дельтапланом на гибкой связи, должен смещать свое тело вправо, влево, вперед, назад. Эти операции пилот выполняет за свет силового взаимодействия своих рук или/и ног с элементами каркаса, находящимися в зоне, доступной для пилота. Смещение тела пилота вправо или влево вызовет смещение общего центра тяжести системы "дельтаплан-пилот". В результате этого прямолинейного летящий дельтаплан получит крен вправо или влево, что приведет к развороту дельтаплана по дуге вправо или влево.
При полете дельтаплана прямо или при выполнении поворота пилот постоянно должен быть обращен в ту же сторону, куда направлена вершина равнобедренной треугольной аэродинамической плоскости.
При выполнении полета против ветра и необходимом курсе полета, не совпадающем с направлением ветра, ось симметрии аэродинамической плоскости (крыла) не совпадает с курсом полета (направление оси симметрии занимает промежуточное положение между курсом полета и направлением ветра). Таким образом, при боковом ветре дельтаплан вынуждено летит боком к курсу полета, ось симметрии аэродинамической плоскости в этом случае развернута в сторону ветра. Этот разворот прямо пропорционален силе ветра. Например при скорости дельтаплана 10 м/с и боковом ветре 10 м/с угол поворота оси симметрии дельтаплана составляет 45 градусов к направлению (курсу) полета. Если есть необходимость проводить посадку при таких условиях, например на дорогу или просеку, пилот вынужден держать дельтаплан боком к направлению посадки. При выполнении полета, когда аэродинамическая плоскость находится на малых углах атаки (меньше 14 градусов) возможен непреднамеренный вход в пикирующий полет. На высотах меньше 20 - 30 метров это может повлечь за собой тяжелые последствия.
Недостатками конструкции дельтаплана являются следующие:
- большие размеры аэродинамической плоскости;
- необходимость постоянной определенной ориентации конструкции в полете (вершина равнобедренного треугольника аэродинамической плоскости должна быть постоянно направлена в сторону вектора скорости движения дельтаплана);
- при боковом ветре ось дельтаплана, являющаяся осью симметрии для его аэродинамической плоскости, не совпадает с направлением движения;
- невозможность устойчивого вертикального спуска;
- невозможность "зависания";
- невозможность выполнения полета, обусловленного желанием пилота, боком и задом.
Первый недостаток усложняет хранение и транспортировку дельтаплана в промежутках между полетами. Остальные недостатки ограничивают эксплуатационные возможности конструкции дельтаплана.
Недостатками способа управления полетом дельтаплана являются следующие:
- длительность выполнения в полете поворотов влево и вправо из-за того, что дельтаплан при смещении вправо или влево общего центра тяжести системы "дельтаплан-пилот" не может сразу же лететь по прямой в требуемом направлении, а вынужден делать этот поворот по дуге, т.е. совмещать движение вперед и движение вбок;
- выполнение поворота на дельтаплане по дуге малого радиуса или при недостаточной скорости приводит к сваливанию на крыло и входу в штопор;
- выполнение полета на малой скорости или на малых углах атаки аэродинамической плоскости может привести к входу в пикирующий полет, что является весьма опасным;
- необходимость придания и сохранения постоянной ориентации дельтаплана относительно направления полета, при которой вершина равнобедренного треугольника аэродинамической плоскости должна быть обращена в направлении вектора скорости и при наличии бокового ветра указанная вершина будет несколько отклоняться от этого направления;
- при курсе дельтаплана, не совпадающем с направлением ветра, ось дельтаплана и положение пилота не совпадают с направлением движения, причем чем выше скорость ветра и меньше скорость дельтаплана, тем угол между осью дельтаплана и направлением полета больше и пилот, и аппарат летят боком к направлению полета;
- необходимость придания и сохранения постоянной ориентации пилота в направлении вершины равнобедренного треугольника аэродинамической плоскости, в результате чего пилот не может быть повернут боком или задом в указанном направлении;
- недопустимость выполнения полетов задом или вбок, обусловленных желанием пилота, а не внешними факторами, т.к. это приведет к опрокидыванию дельтаплана в воздухе.
Первый недостаток удлиняет операции управления дельтапланом, что снижает эффективность способа управления. Второй и последующие недостатки ограничивают возможности способа управления полетом дельтаплана, а также усложняют реализацию способа управления полетом дельтаплана, заставляя пилота сохранять свое требуемое положение относительно дельтаплана неизменным.
Известно решение по книге К.С.Горбенко и Ю.В.Макарова "Самолеты строим сами", М., "Машиностроение", 1989 г., стр. 180 - 181, вертолет "Вихрь". Его конструкция принята в качестве прототипа. Это одноместный вертолет с двухлопастным несущим винтом. На концах лопастей несущего винта установлены прямоточные воздушно-реактивные двигатели (ПВРД) со статической тягой около 2 кгс (20 Н). Горючее из топливного бака, расположенного под сиденьем пилота, под давлением подается через полые лопасти винта к двигателям. Шасси вертолета трехколесное. Переднее колесо самоориентирующееся. Управление вертолетом непосредственное - отклонением плоскости вращения несущего винта. Ручка управления "шаг-газ" отсутствует. Управление шагом несущего винта осуществляется автоматически. Для этого на вертолете установлена простейшая автоматическая втулка винта (по типу вертолета А.И. Болдырева). Втулка имеет общий горизонтальный шарнир, установленный под углом 45 градусов к оси двухлопастного несущего винта. С увеличением оборотов винта (увеличением "газа") увеличивается угол атаки его лопастей. А когда "газ" минимальный, лопасти приподнимаются относительно горизонта вверх и автоматически устанавливаются на нулевые углы атаки. Вертолет безопасно авторотирует.
Лопасти вертолета были изготовлены из дюралюминиевой трубы каплеобразного профиля с прикрепленным к ней хвостиком лопасти из тонкого дюралюминиевого листа. Вертолет имеет открытую кабину. Хвостовое оперение его состоит из киля с рулем направления, вынесенным на трубчатой хвостовой балке. "Вихрь" имеет компоненту и вполне совершенную конструкцию. Прямоточные воздушно-реактивные двигатели прошли испытания на стенде. Двигатель обдувался потоком воздуха.
Фиксирование положения пилота на сиденье осуществляется при помощи гибких связей (ремней, лямок), которыми пилот соединяется с сиденьем и каркасом.
На каркасе жестко закреплена горизонтальная штанга с лежащим в вертикальной плоскости рулем поворота. Руль поворота, установленный на штанге при помощи вертикальной оси, имеет возможность поворота около 180 градусов около этой оси за счет кинематической цепи, соединяющей его с ручкой управления. Указанная ручка совмещена с одним из стержней каркаса, находящегося в зоне действия рук пилота.
В процессе полета вертолета пилот, осуществляя при помощи вышеописанной ручки управления поворот руля в ту или другую сторону, поворачивает каркас вместе с сиденьем в соответствующую сторону.
Известен способ управления полетом вышеописанного вертолета "Вихрь", принятый в качестве прототипа. Так как способ-прототип является одновременно описанием работы устройства-прототипа, то автор счел возможным совместить разделы "описание работы устройства-прототипа" и "описание способа-прототипа".
В выбранном способе-прототипе пилота размещают на сиденье вышеописанного вертолета и соединяют с сиденьем и с каркасом гибкими связями (ремнями, лямками), обеспечивающими удержание пилота около каркаса. Каркас имеет изогнутую в вертикальной плоскости конфигурацию, что обеспечивает нахождение на вертикальной оси ротора общего центра тяжести системы "летящий вертолет - пилот". Это условие исключает наклон вертикальной оси ротора при его нахождении в воздухе, если пилот с сиденьем находится с исходном положении, когда изгиб каркаса обращен в сторону от спины сидящего пилота и лежит в воображаемой вертикальной плоскости, делящей тело пилота на симметричную левую и правую половины. Для осуществления взлета (старта), полета необходимо осуществить подачу топлива в реактивные насадки на концах лопастей, что приводит эти лопасти во вращение.
Вертолет взлетит вертикально вверх на какую-то высоту и будет находиться там столько времени, сколько позволит количество топлива в баке, затем вертолет будет совершать замедленное вертикальное снижение, замедление которого обеспечивается вращением лопастей от набегающего потока воздуха. При вышеуказанном исходном положении пилота, когда общий центр тяжести летящего вертолета и пилота находится на вертикальной оси вращающегося ротора, отсутствует горизонтальная составляющая сила, которая вынудила бы вертолет лететь в горизонтальном направлении.
Когда пилот хочет осуществить наклонный или горизонтальный полет на вертолете, он, взаимодействуя руками с ручкой управления, осуществляет наклон плоскости ротора вправо или влево, вперед или назад. Это вызовет наклон вправо или влево вертикальной оси вращающегося ротора, что вызовет появление горизонтальной составляющей силы, которая и обеспечит горизонтальное перемещение вертолета в направлении наклона его оси.
В конструкции устройства-прототипа устранены некоторые недостатки, отмеченные выше у дельтаплана. В отличие от дельтаплана вертолет имеет малые размеры, не требует постоянной и определенной ориентации в зависимости от направления полета, может подниматься и опускаться вертикально, может зависать в воздухе.
Недостатками устройства-прототипа являются следующие. Так как пилот прикреплен к сиденью пилота и не может перемещаться относительно центра тяжести системы "вертолет-пилот", следовательно, вертолет не может иметь наклон и лететь в том горизонтальном направлении, в сторону которого не может быть смещен центр тяжести системы "вертолет-пилот". В результате сокращаются эксплуатационные возможности вертолета. Так как пилот на сиденье имеет неизменное положение, то остается неизменным и положение центра тяжести системы "вертолет-пилот", что сокращает эксплуатационные возможности вертолета. Так как пилот перед стартом должен занять сидячее положение на сиденье и пристегнуться к нему гибкими связями, то такое положение пилота исключает его самостоятельный взлет при неработающих или отсутствующих двигателях, например со склона холма. Это тоже сокращает эксплуатационные возможности вертолета.
Так как при приземлении вертолета пилот находится в сидячем положении и пристегнут к сиденью и каркасу гибкими связями, то такое положение пилота является опасным при посадке с наличием горизонтальной скорости при посадке с боковым ветром, поскольку ось каркаса не будет совпадать с направлением посадки. Это снижает безопасность при эксплуатации вертолета.
Следует отметить как недостаток и наличие сиденья в конструкции прототипа. Оно утяжеляет и усложняет конструкцию, а также ухудшает аэродинамические качества прототипа. Положение пилота "сидя" также ухудшает аэродинамические качества вертолета. Руль поворота, закрепленный в выносной штанге и в основном предназначенный для обеспечения ориентации пилота в направлении полета, при наличии бокового ветра разворачивает пилота в сторону направления ветра. Пилот в небольших пределах может повернуть каркас и вместе с ним свой корпус в направлении полета с помощью руля поворота. Но эти возможности ограничены малым углом поворота руля (менее 180 градусов).
Жесткое закрепление на каркасе вертолета штанги, несущей руль, определяет эту оконечность как "зад", а противоположную оконечность - как "перед". Это исключает или затрудняет маневр и полет вертолета в таких направлениях, как назад (т.е. в направлении штанги), вправо или влево непосредственно после выполнения управляющего движения. Исключение или затрудненность маневра и полета назад, т.е. "задом", обусловлена тем, что пилот не может развернуть и тело, и лицо в эту сторону, не развернув весь каркас в этом направлении. А это можно сделать только, осуществив разворот по дуге определенного радиуса. Исключение или затрудненность быстрого поворота и полета влево или вправо также обусловлены необходимостью выполнения полета по дуге определенного радиуса.
В способе-прототипе устранены некоторые из недостатков, отмеченные у способа управления полетом дельтаплана. При выполнении в полете поворотов вправо или влево имеет место быстрое выполнение этих маневров благодаря тому, что эти повороты могут выполняться по дуге меньшего радиуса (по сравнению с дельтапланом). Это упрощает способ-прототип. Пилоту не требуется выполнять операцию по приданию вертолету и постоянному поддержанию одной и той же ориентации его относительно направления вектора скорости вертолета, т.е. направлению полета, таким образом вертолет может лететь, не меняя своей ориентации прямо (т.е. вперед) по горизонтали, направо, налево, т.е. в любом направлении, куда может быть наклонена плоскость вращения лопастей.
Исключением является полет в секторе, образованном в районе спины пилота. Пилот может осуществлять вертикальные полеты на вертолете и зависать в воздухе, что расширяет возможности способа-прототипа.
Недостатками способа-прототипа являются следующие.
То, что пилота при помощи гибких связей (ремней, лямок) фиксируют на сиденье, ограничивает диапазон, в котором он может действовать своими руками при управлении полетом вертолета. Это уменьшает возможность способа-прототипа.
То, что пилот при управлении полетом вертолета не может изменять свое сидячее положение на любое другое (вертикальное, горизонтальное, наклонное и т. п.), исключает возможность перемещения центра тяжести пилота за счет принятия им другого положения, кроме сидячего. Это, в свою очередь, исключает возможность перемещения общего центра тяжести системы "вертолет-пилот" и, как следствие, исключает изменение направления полета вертолета, что уменьшает возможности способа-прототипа.
То, что пилот вертолета не может иметь вертикальное, горизонтальное или другое положение тела, кроме сидячего и не может в этом положении повернуться вокруг вертикальной оси, обратившись в другом направлении своим фасадом (передом), также уменьшает возможности способа прототипа.
То, что пилот вертолета при управлении полетом не может перемещаться относительно центра тяжести системы "вертолет-пилот", ограничивает возможность управления полетом, т.к. ограничивает диапазон возможных перемещений центра тяжести пилота, а следовательно, и всей системы "вертолет-пилот".
Задачами, решаемыми в перелагаемом устройстве, являются расширение эксплуатационных возможностей прототипа, повышение техники безопасности при его эксплуатации, упрощение конструкции и повышение аэродинамических качеств.
Задачей, решаемой в предлагаемом способе, является расширение возможностей управления полетом....
Поставленные для устройства задачи решаются за счет того, что в ротоплане, содержащем включающий стержневые элементы каркас, в верхней части которого вертикально установлен с возможностью вращения ротор с лопастями, на каркасе смонтирован руль поворота ротоплана, имеющий возможность разворота вокруг вертикальной оси ротора и кинематически связанный с рукояткой управления, соединенной с элементом каркаса, около которого закрепленная на каркасе гибкая связь, например трос, удерживает пилота на расстоянии действия по меньшей мере одной конечности, выполнено следующее.
Руль поворота смонтирован с возможностью разворота на угол более 360 градусов вокруг оси ротора.
Длина "a" гибкой связи 17 (фиг. 1 и 2) обеспечивает любое положение висячего на ней пилота 19, ориентацию пилота в любом направлении полета и возможность его перемещения в любом направлении. Кроме того, расстояние "b" между вращающимися лопастями 8 и выполняющими роль опоры ротоплана стержнями 4 и 5 каркаса может превышать высоту "c" стоящего пилота 19, а длина "a" гибкой связи 17 обеспечивает у вертикально висящего на ней пилота 19 более низкое положение ступней, чем у выполняющих роль опоры ротоплана стержней 4 и 5 каркаса.
Расстояние между вращающимися лопастями 8 и выполняющими роль опоры ротоплана стержнями 4 и 5 каркаса превышает высоту "b" стоящего пилота 19, а длина гибкой связи 17 обеспечивает у вертикально висящего пилота 19 более низкое положение ступней, чем у выполняющих роль опоры стержней 4 и 5 каркаса.
Поставленная для способа задача решается за счет того, что в способе управления вышеописанным ротопланом, заключающемся в удержании пилота около каркаса при помощи по меньшей мере одной гибкой связи, расположении общего центра тяжести летящего ротоплана с пилотом на вертикальной оси вращающегося ротора и смещении этого центра с указанной оси посредством изменения положения пилота относительно каркаса вследствие силового воздействия одной или нескольких конечностей пилота на один или несколько элементов каркаса, выполняются следующие операции.
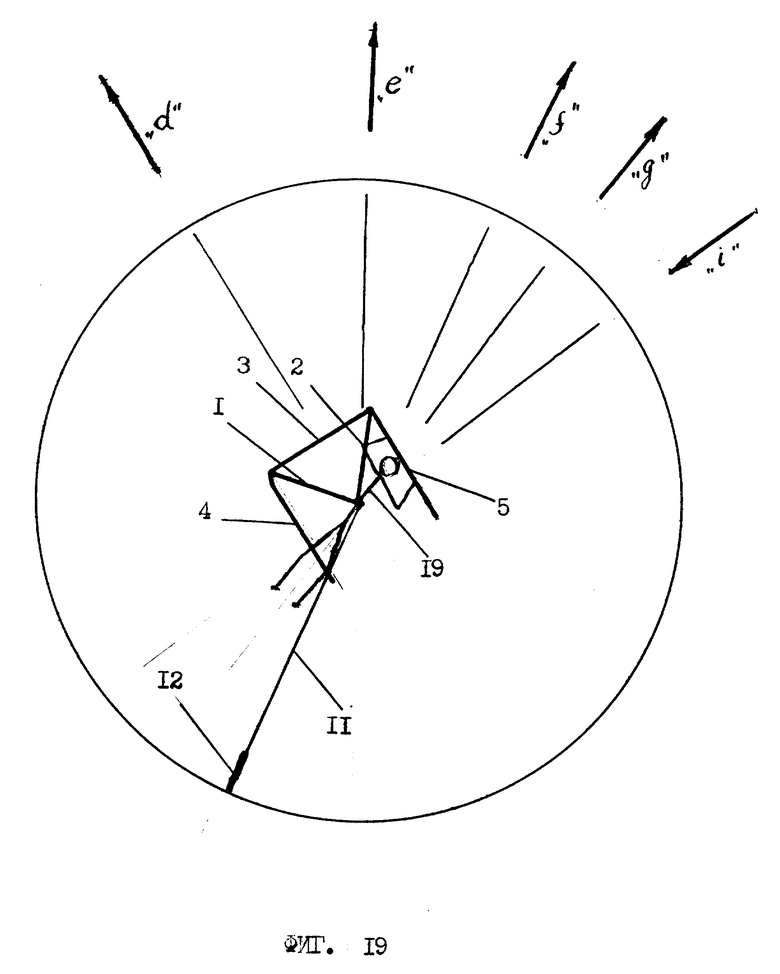
Пилот 19 летящего ротоплана висит на гибкой связи 17 в любом положении, обращен в любом направлении полета и перемещается в требуемом направлении (см. фиг. 19).
Существенность отличительных признаков предлагаемого ротоплана подтверждается следующим.
Условие, в соответствии с которым руль поворота 12 смонтирован с возможностью разворота на 360 градусов вокруг вертикальной оси ротора, обеспечивает у ротоплана наличие следующих качеств.
Ротоплан может совершать взлет, горизонтальный полет, посадку в любом направлении, развернув каркас и пилота в необходимом направлении, в т.ч. и по направлению полета, причем независимо от направления движения ротоплана. Это расширяет эксплуатационные возможности ротоплана.
Наличие управляемого пилотом 19 руля 12, который имеет возможность поворота вокруг вертикальной оси 6 ротора на угол более 360 градусов, обеспечивает следующие достоинства при эксплуатации ротоплана.
Ротоплан может лететь в любом направлении при любом положении каркаса и пилота относительно этого направления (следовательно в конструкции ротоплана будут отсутствовать такие постоянные понятия как "перед" и "зад", т.к. "задом" будет являться та сторона ротоплана, в которую обращен руль 12 в результате своего разворота вокруг оси 6 ротора). Это расширяет эксплуатационные возможности ротоплана.
У "висящего" в воздухе на одном месте ротоплана пилот 19 может осуществить поворот каркаса в диапазоне более 360 градусов за счет поворота руля вокруг вертикальной оси 6 ротора в направлении, противоположном требуемому повороту каркаса. В этом случае руль 12 будет использован как своеобразное воздушное весло, при помощи которого пилот 19 осуществляет требуемый поворот каркаса. Таким образом имеет место расширение эксплуатационных возможностей ротоплана.
Понятие "разворот руля 12 в диапазоне более 360 градусов" подразумевает то, что руль 12 может описать угол поворота 360 градусов не один раз, а неограниченное множество. Благодаря этому качеству3 пилот 19 не ограничен каким-либо пределом, дальше которого руль 12 не может разворачиваться. Поэтому очередной требуемый разворот руля 12 пилот 19 может выполнять как по часовой стрелке так и против нее, что расширяет эксплуатационные возможности ротоплана. Благодаря вышеописанному качеству пилот 19 может выполнить очередной требуемый разворот руля 12 в том направлении, в котором этот разворот составит минимальный угол, а следовательно, будет выполнен за меньший отрезок времени и с меньшими физическими затратами пилота. Это подтверждает расширение эксплуатационных возможностей ротоплана и говорит о снижении физической нагрузки пилота в процессе эксплуатации ротоплана.
Гибкая связь 17 в предлагаемом ротоплане выполняет несколько функций одновременно: удерживает пилота 19 около каркаса, обеспечивает пилоту 19 при взлете и посадке возможность выполнить пробежку или несколько шагов без воздействия веса ротоплана на корпус пилота 19, обеспечивает висячее положение пилота 19, обеспечивает пилоту 19 возможность занимать любое положение (вертикальное, горизонтальное, согнутое и т. п.), обеспечивает пилоту 19 возможность ориентации в любом направлении полета (чтобы и пилот был обращен в этом направлении), позволяет пилоту 19 перемещаться в любом требуемом направлении.
Удержание пилота 19 около каркаса необходимо для того, чтобы пилот 19 мог взаимодействовать одной или несколькими своими конечностями с одним или несколькими элементами 1, 2, 3, 4, 5, 13, 14 каркаса (см. фиг. 2 и 3), что необходимо для перемещения пилота в требуемом направлении и управления ротопланом.
Висячее положение пилота 19 необходимо для того, чтобы у него была максимальная свобода для принятия любого требуемого положения тела (вертикальное, горизонтальное и др.). Именно в висячем положении пилот 19 имеет наибольшие возможности для принятия наибольшего числа вариантов положений своего тела, направленных на расширение диапазона управляющих воздействий, а тем самым на расширение эксплуатационных возможностей устройства.
Возможность ориентации пилота 19 в любом направлении необходима для того, чтобы пилот 19 мог поворачиваться вокруг своей вертикальной оси в ту сторону, куда летит или должен лететь ротоплан. При этом пилот 19 может не менять своего вертикального или горизонтального положения тела. Естественно, что при выполнении указанной ориентации (т.е. при повороте пилота вокруг своей вертикальной оси) он может быть обращен к каркасу передом, боком, задом и т.д. Обращение (направление, разворот) пилота 19 в сторону полета необходимо для максимального удобства управления полетом и для соблюдения эргономического соответствия ориентации пилота относительно направления полета. При этом лишь при достаточной длине "a" гибкой связи 17 пилот 19 будет иметь достаточную свободу для своей ориентации в требуемом направлении полета. Т. к. указанная ориентация пилота 19 осуществляется путем поворота его на указанной связи 17 вокруг вертикальной оси, то при малой длине "a" связи, выполненной, например, в виде троса, она будет при своем скручивании оказывать большее сопротивление повороту пилота 19, чем при ее большей длине. Все это обеспечивает расширение эксплуатационных возможностей устройства.
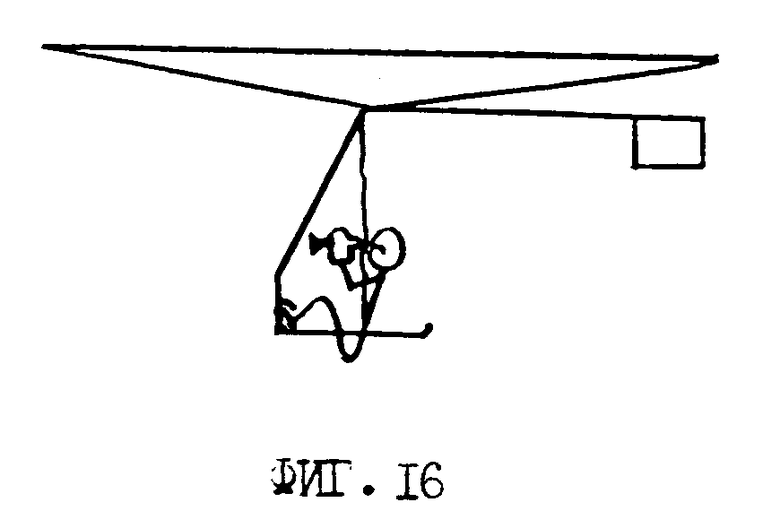
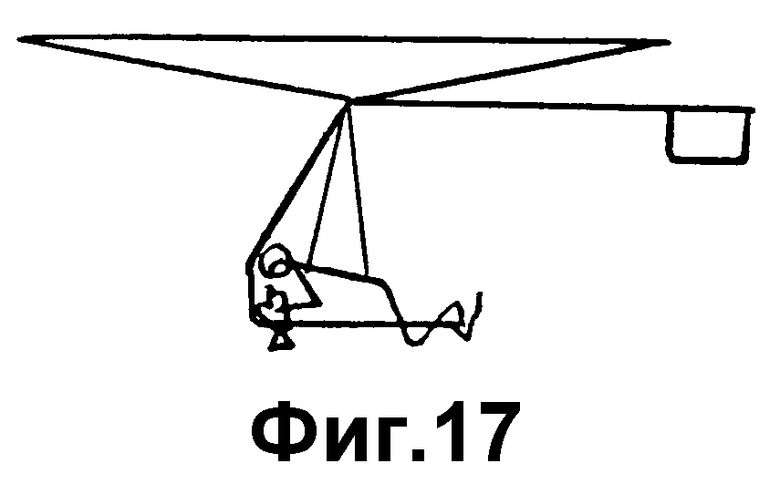
Любое положение свободно висящего пилота 19 необходимо ему для оптимальной эксплуатации устройства и для максимальной комфортности. Пилот может совершать полет в вертикальном, горизонтальном, наклонном и других положениях своего тела, которые в каждом конкретном случае в наибольшей степени отвечают требованиям данного полета, состояния пилота и т.п. (см. фиг. 1, 2, 16, 17). Но это условие может быть реализовано только в том случае, если гибкая связь 17 имеет достаточную длину "a", обеспечивающую возможность принятия пилотом 19 любого положения.
Возможность, при которой свободно висящий на гибкой связи 17 пилот 19 может перемещаться в любом направлении, также может быть реализована только при достаточной длине "a" этой связи 17. Если, например, указанная связь 17 имеет малую длину, удерживает пилота 19 на весу в вертикальном положении лицом к каркасу и присоединена к пилоту со стороны его спины, то пилоту 19 будет трудно смещать себя на этой связи 17 назад, вперед или вбок, отталкиваясь руками от стержней 1, 2 и 3 каркаса. Указанная затрудненность объясняется тем, что вышеуказанным образом присоединенная к пилоту 19 укороченная связь будет препятствовать смещению пилота назад, т.к. он будет вынужден прикладывать большие усилия для этих перемещений (известно, что для перемещения груза, висящего на короткой веревке, требуется большее усилие, чем для отклонения этого же груза, висящего на длинной веревке). Если же в этом случае связь будет длинной, то пилот 19 сможет сместиться в вертикальном положении, отталкиваясь от элементов каркаса с меньшими усилиями.
В случае двух коротких связей, расположенных по бокам пилота и удерживающих его на весу, они не будут контактировать со спиной и затылком пилота при его смещении назад. Но их малая длина приведет к необходимости приложения пилотом больших усилий, необходимых для смещения его тела назад, вперед, вправо или влево.
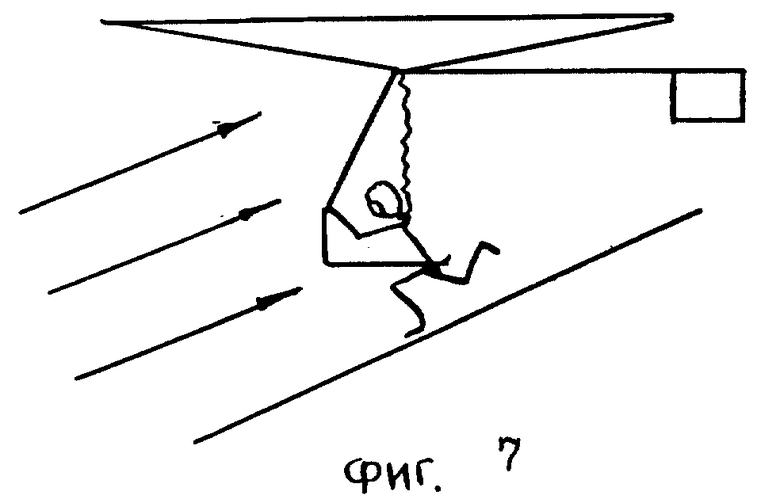
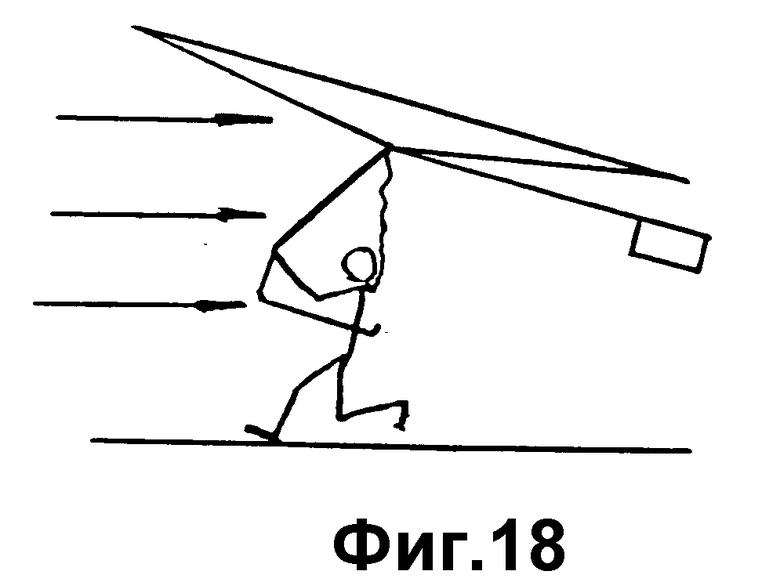
Более низкое положение ступней у вертикально висящего пилота, чем у нижней части каркаса обеспечивает пилоту возможности в процессе взлета и посадки перемещаться на своих ногах. Причем из-за наличия именно гибкой связи 17, вес ротоплана не воздействует на корпус пилота (см. фиг. 1, 6, 7, 18). Это существенно расширяет эксплуатационные возможности ротоплана.
Если гибкая связь 17 имеет достаточную длину "a", то свободно висящий на ней пилот 19 может выполнять следующие перемещения:
- из вертикального положения в горизонтальное и наоборот;
- в вертикальном (в горизонтальном) положении он может поднимать (опускать) ноги или опускать (поднимать) верхнюю часть тела;
- поворачиваться около вертикальной оси, проходящей через связь 17 или рядом с ней;
- поворачиваться в горизонтальном положении около горизонтальной оси, расположенной вдоль него;
- поворачиваться около горизонтальной оси, расположенной поперек него;
- выполнять все вышеописанные повороты вокруг вышеописанных осей, занимающих промежуточное (наклонное) положение между горизонтальными и вертикальными;
- смещаться поступательно вперед - назад, вправо - влево и т.д.
Все это будет сопровождаться соответствующим изменением положения центра тяжести системы "ротоплан-пилот" и последующим изменением направления полета ротоплана, следовательно, имеет место расширение эксплуатационных возможностей устройства (фиг. 8-10, 11-15). Пилот 19 в предлагаемом устройстве может быть обращен к каркасу передом, боком, спиной и т.д., а не только спиной, как в прототипе. Это расширяет эксплуатационные возможности устройства.
Качественному взаимодействию конечностей пилота 19, в частности его рук с каркасом при перемещении пилота, способствует тот факт, что каркас включает стержневые элементы 1, 2, 3, 4, 5. Конфигурация сечения стержней (круглая, многогранная и т. п. ) является наиболее удобной для захвата их руками. На стержневых элементах, 1, 2, 3, 4, 5, с которыми взаимодействуют руки пилота, могут быть размещены вращающиеся трубчатые насадки управления рулем поворота, подачи топлива, угла наклона лопастей и т.д. (см. фиг. 2, 3). Все это повышает удобство эксплуатации предлагаемого устройства.
Отпадает необходимость иметь в каркасе специальные стержневые элементы, предусмотренные в прототипе для того, чтобы сидящий спиной к каркасу пилот мог взаимодействовать с этими элементами руками при повороте сиденья, т.е. при изменении своего положения. Так как в предлагаемом устройстве пилот 19 висит рядом с каркасом на гибкой связи 17, то он может взаимодействовать, практически, с любым ближайшим к нему элементом каркаса, а не с каким-то определенным. Поэтому отсутствие в каркасе вышеназванных специальных стержневых элементов упрощает предлагаемое устройство и улучшает его аэродинамические характеристики.
Отсутствие в конструкции устройства сиденья упрощает ротоплан и улучшает его аэродинамические характеристики. Последнее объясняется меньшей силой тяжести ротоплана и меньшим воздушным сопротивлением, которые испытывает летящий ротоплан.
Условие, в соответствии с которым расстояние "b" между вращающимися лопастями 8 и выполняющими роль опоры ротоплана стержнями 4 и 5 каркаса, превышает высоту "c" стоящего пилота 19, позволяет пилоту при нахождении ротоплана на земле (т.е. когда каркас стержнями 4 и 5 опирается на землю) подходить к каркасу или отходить от него независимо от того, вращаются лопасти 8 ротоплана или они неподвижны (см. фиг. 1, 4). Это повышает технику безопасности при эксплуатации ротоплана.
Условие, в соответствии с которым длина "a" гибкой связи 17 обеспечивает у вертикально висящего на ней пилота 19 более низкое положение ступней, чем у стержней 4 и 5 каркаса, направлено на получение следующих качеств.
При старте, например, со склона горы пилот 19 (фиг. 7), соединенный с закрепленной на каркасе гибкой связью 17, руками за стержни 1 и 2 поднимает каркас и самостоятельно перемещается с ротопланом по склону горы. Это расширяет эксплуатационные возможности устройства.
При посадке (фиг. 18), когда ротоплан спускается с высоты, ступни пилота первыми встанут на землю, а после низ на землю опустятся стержни 4 и 5 каркаса. В результате пилот 19, уже стоящий на земле, не пострадает, если ротоплан по каким-либо причинам вдруг опрокинется. Кроме этого, стоящий пилот может предотвратить указанное опрокидывание каркаса. Это повышает технику безопасности при эксплуатации устройства.
Одновременное наличие в конструкции ротоплана вышеописанных руля 12 поворота и гибкой связи 17, на которой висит пилот 19, в еще большей степени расширяют эксплуатационные возможности ротоплана, что подтверждается следующим.
При выполнении разворота каркаса у "висящего" на одном месте в воздухе ротоплана за счет разворота руля 12 пилоту 19 потребуется значительный временной интервал. Этот большой отрезок времени необходим в связи со значительными физическими затратами пилота 19, возникающими при вращении рукоятки 13, которая связана с рулем 12 через кинематическую цепь с повышающим передаточным отношением, или с медленным разворотом руля 12 из-за понижающего передаточного отношения в указанной кинематической цепи. Поэтому пилот 19 при выполнении разворота руля 12 путем манипуляций с вышеназванной рукояткой 13 может, не ожидая требуемого разворота каркаса, развернуться самому на гибкой связи 17 в требуемом направлении, в котором, спустя упомянутый интервал, развернется и сам каркас. При этом гибкая связь 17 обеспечит неизменность углового положения пилота 19 относительно курса полета и в то же время обеспечит возможность поворота каркаса до требуемого положения. Таким образом использованы одновременно такие проявления конструкции ротоплана как быстрое выполнение пилотом 19 поворота на гибкой связи 17; разворот каркаса в том же направлении, что и у пилота 19, качество гибкой связи 17, позволяющее как пилоту 19 разворачиваться относительно каркаса, так и каркасу разворачиваться относительно пилота 19. Все сказанное подтверждает расширение эксплуатационных возможностей ротоплана.
Существенность отличительных признаков предлагаемого способа заключается в следующем.
Операция, заключающаяся в висении пилота 19 на гибкой связи 17 в любом положении, обеспечивает пилоту 19 возможность управления полетом при том положении тела пилота, которое в данный момент является наиболее безопасным, рациональным или оптимальным. А так как указанное положение тела в следующий момент не будет (или может не быть) безопасным, рациональным и оптимальным, то пилот 19 должен быть готов к его изменению. Но это изменение положения тела легче всего выполнять в подвешенном состоянии, что и обеспечивается пилотом, висящим на гибкой связи.
Операция, в результате выполнения которой пилот 19 обращен в любом направлении полета, направлена на то, чтобы соблюсти совмещение направления полета ротоплана и ориентацию пилота 19 относительно этого направления. Это совмещение отвечает требованиям техники безопасности при выполнении управления полетом, эргономики и, иногда, аэродинамическим условиям полета. Очевидно, что пилот находится в наиболее выгодном с точки зрения безопасности управления полетом и его комфортности положении, когда он обращен (повернут) в ту же сторону, куда летит ротоплан. С точки зрения аэродинамики, если пилот, например, занимает горизонтальное положение, то ориентация его тела поперек направления полета будет снижать качество полета. Поэтому необходимо выполнение пилотом разворота тела вдоль направления полета, чтобы уменьшить воздушное сопротивление.
Естественно, что именно операция, заключающаяся в висении пилота 19 на гибкой связи 17, обеспечивает максимальное число положений тела пилота и максимальный диапазон ориентаций пилота. Все это подтверждает расширение возможностей управления полетом.
Условие, в соответствии с которым пилот 19 может в процессе полета принять любое положение, обеспечивает следующие качества.
Очередное новое положение, которое занимает пилот 19 в полете, обеспечивает его центру тяжести, а следовательно, и центру тяжести системы "ротоплан-пилот" новое положение. Это вызывает соответствующий наклон ротоплана и, как следствие, появление горизонтальной составляющей силы, вынуждающей ротоплан перемещаться в направлении действия этой силы (см. фиг. 8, 9, 10, 11, 12, 13, 14, 15). Следовательно, новое положение пилота может служить предпосылкой для изменения направления полета.
Кроме этого, очередное новое положение пилота в полете может быть им использовано для эксплуатационных (производственных) проблем. Например, пилот 19 летит на ротоплане прямо вперед, имея наклонное положение, при котором его верхняя часть тела приближена, а нижняя часть тела удалена от каркаса (фиг. 2, 16, 17). Руки пилота взаимодействуют со стержневыми элементами 1, 2, 3, 4, 5 каркаса. Возникла необходимость освобождения рук пилота для выполнения какой-либо работы (фото или киносъемка, настройка радиоаппаратуры и т.п.). Пилот занимает новое положение, при котором его тело изменяет направление наклона: верхняя часть тела удалена от каркаса, а нижняя часть приближена к нему, т.е. пилот как бы повернулся вокруг горизонтальной поперечной оси, как вокруг турника. При таком новом положении центр тяжести пилота не изменяет своего положения, поэтому направление полета не изменяется. Но т.к. ноги пилота будут приближены к каркасу, то пилот 19 может взаимодействовать своими ступнями со стержневыми элементами 1, 2, 3, 4, 5 каркаса, заменяя этим имевшее ранее место взаимодействие рук с элементами каркаса. Освободившимися руками пилот может выполнять необходимую работу.
Операции по перемещению самого себя в требуемом направлении пилот 19 выполняет в висячем положении за счет силового воздействия одной или нескольких своих конечностей (рук или/и ног) на один или несколько стержневых элементов 1, 2, 3, 4, 5 каркаса: притягивание (отталкивание) себя обеими руками, притягивание одной рукой и отталкивание другой рукой и т.п. Вследствие этих операций пилот может перемещаться из одного положения в какое-нибудь другое в следующих направлениях: из вертикального положения в горизонтальное и наоборот; в вертикальном (горизонтальном) положении он может поднимать (опускать) ноги или/и опускать (поднимать) верхнюю часть тела; в любом положении поворачиваться около вертикальной оси; в горизонтальном положении поворачиваться около горизонтальной оси, расположенной вдоль него; в любом положении поворачиваться около горизонтальной оси, расположенной поперек него; выполнять все вышеописанные повороты около наклонных осей, занимающих промежуточные положения между горизонтальным и вертикальным; смещаться поступательно вперед-назад, вправо-влево, наискосок и пр.
В результате имеет место более широкий диапазон направлений и величин перемещения общего центра тяжести системы "ротоплан-пилот", что подтверждает расширение возможностей управления полетом ротоплана.
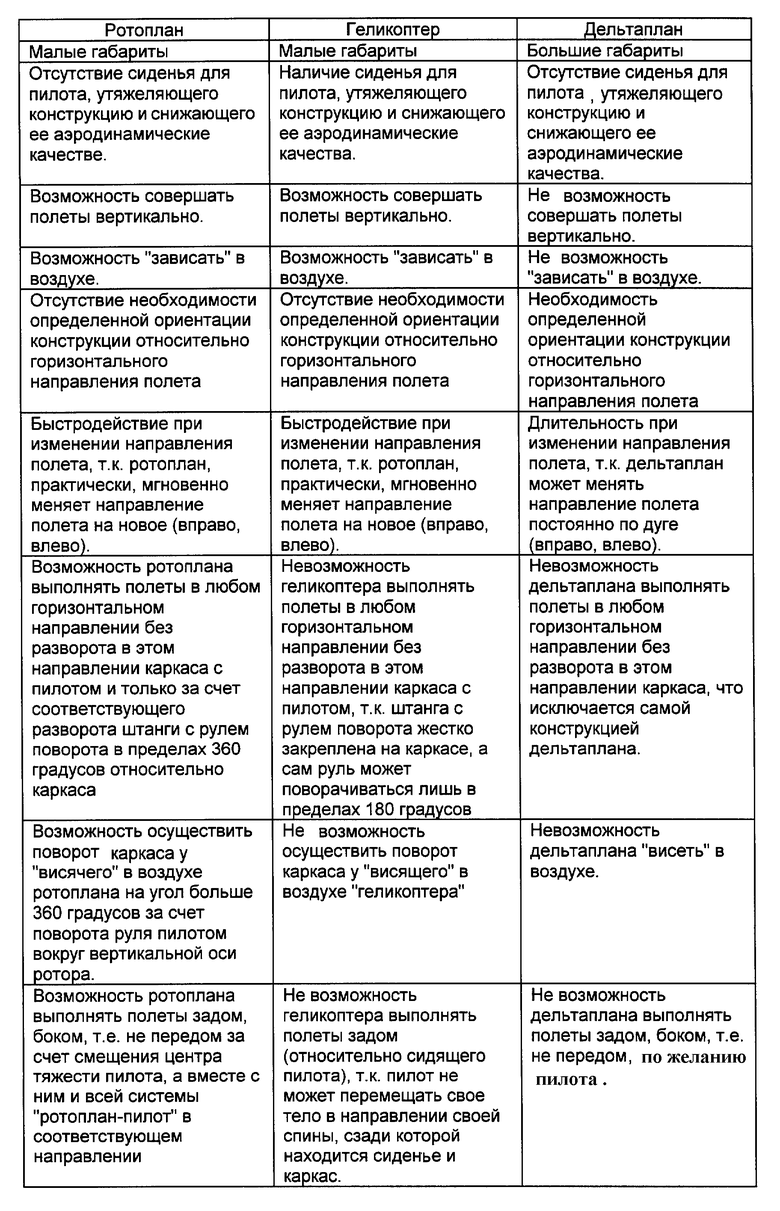
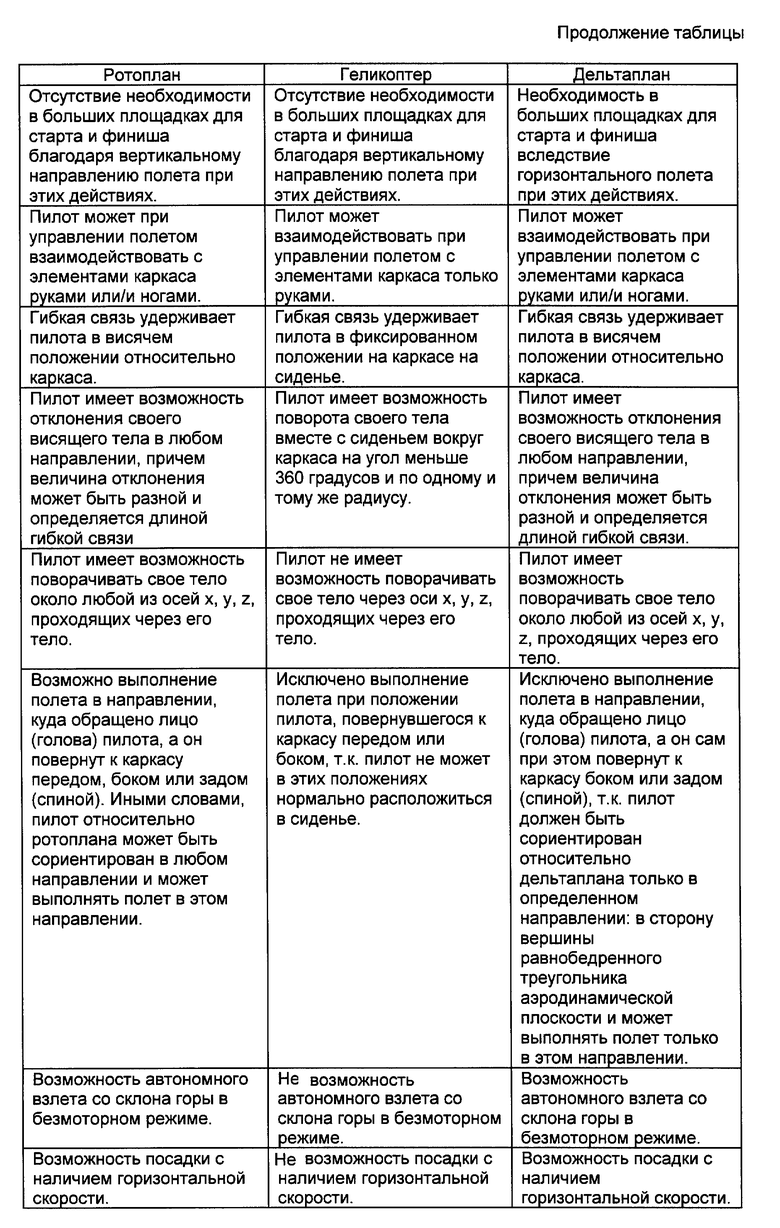
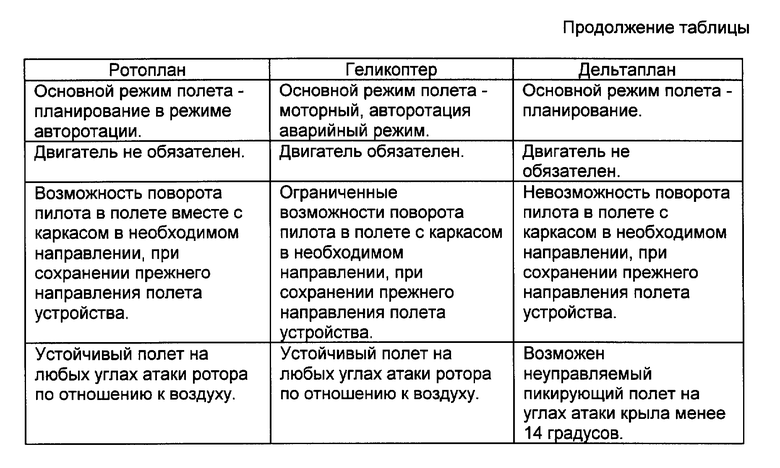
Для сравнения отличий конструкций предлагаемого ротоплана, геликоптера-прототипа и дельтаплана, а также способов управления их полетами приводится таблица.
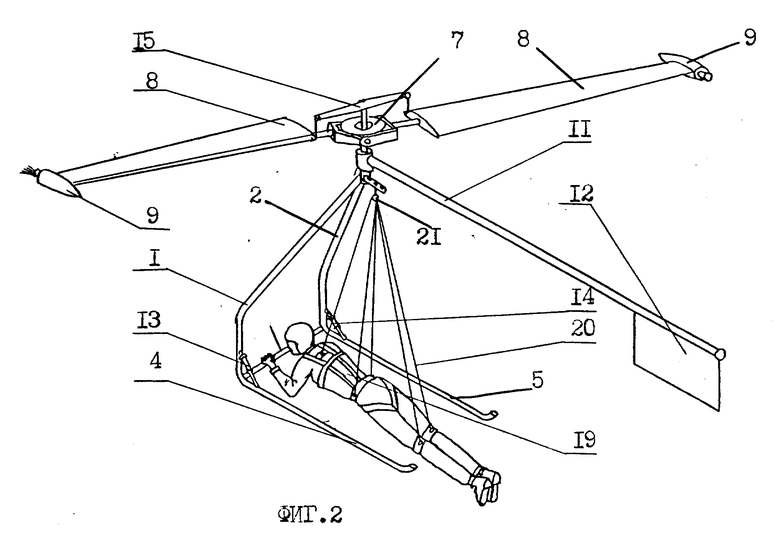
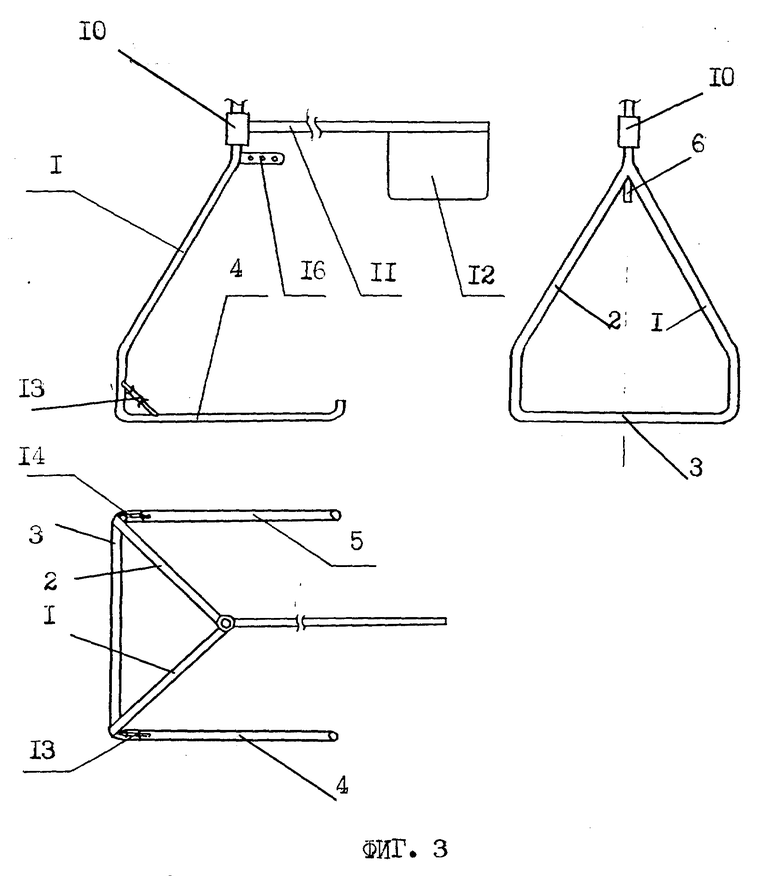
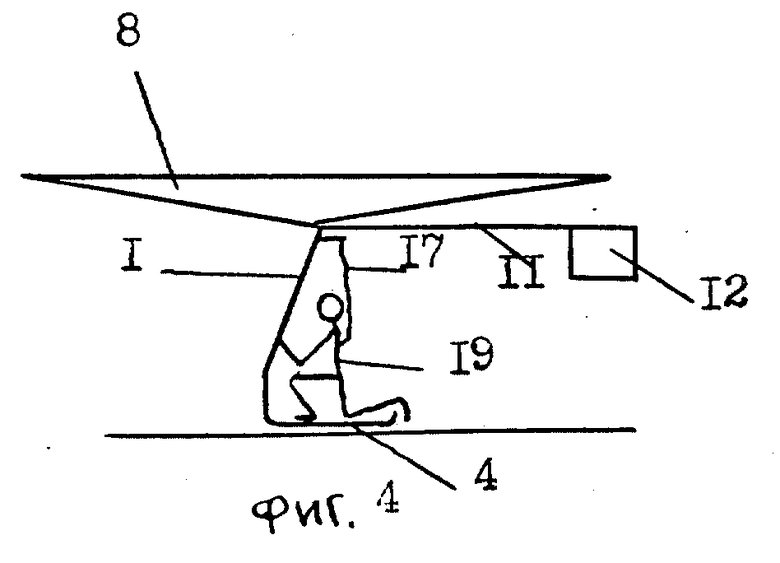
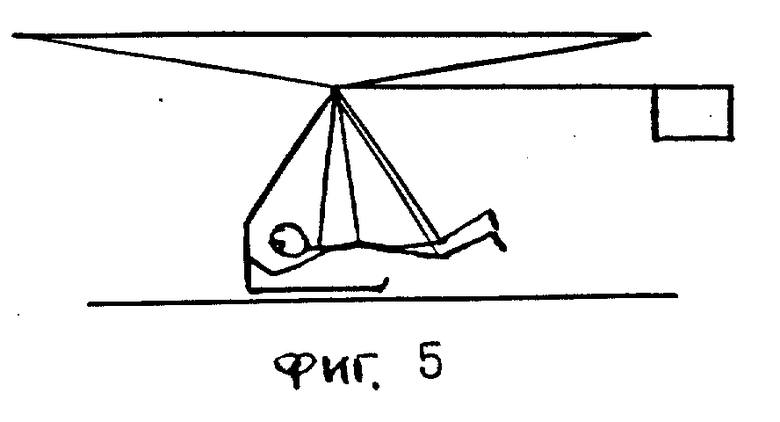
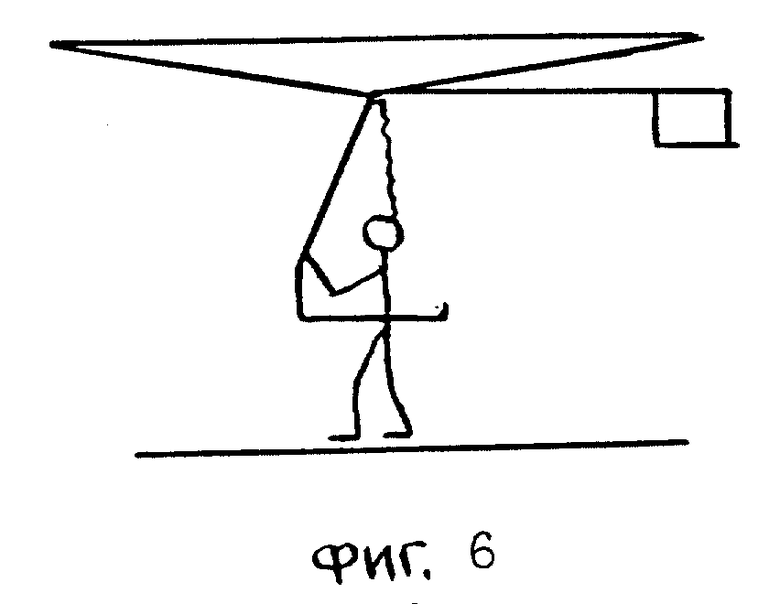
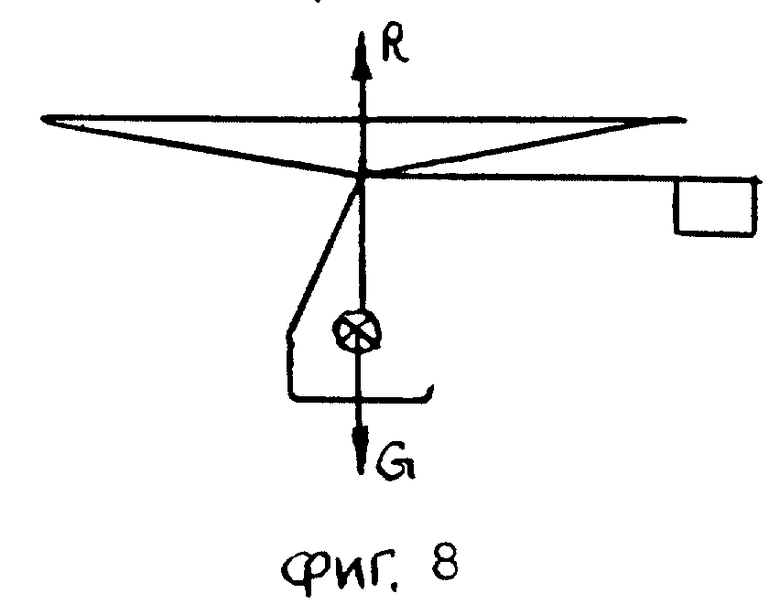
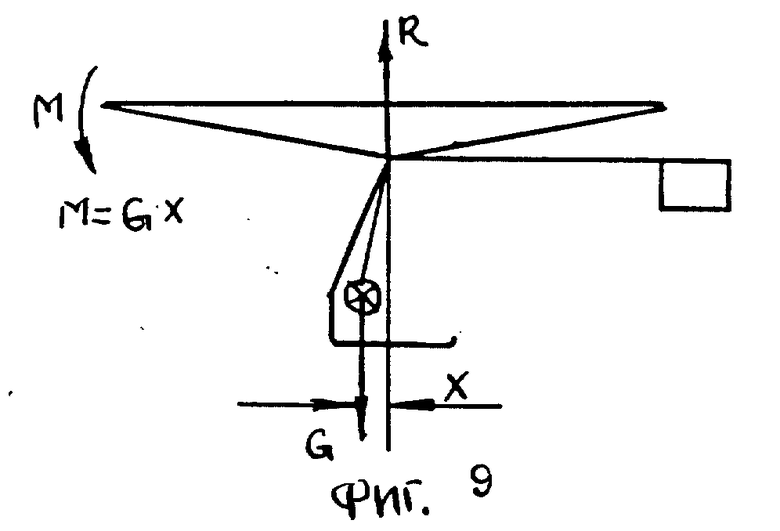
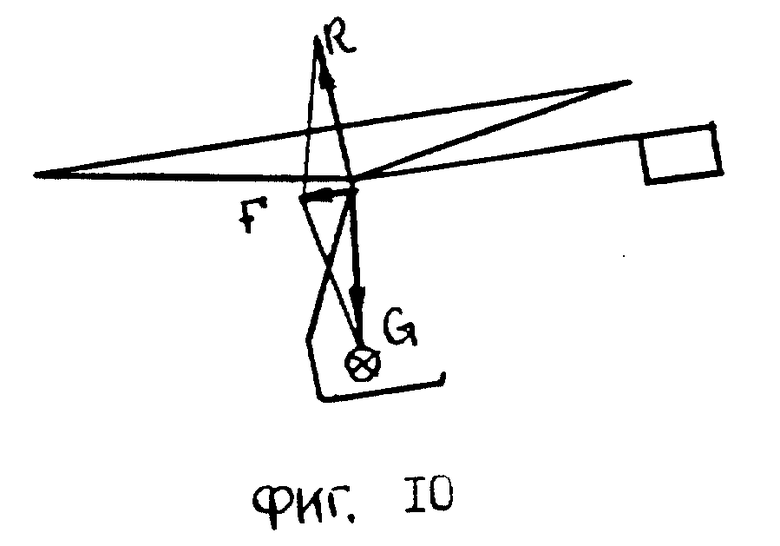
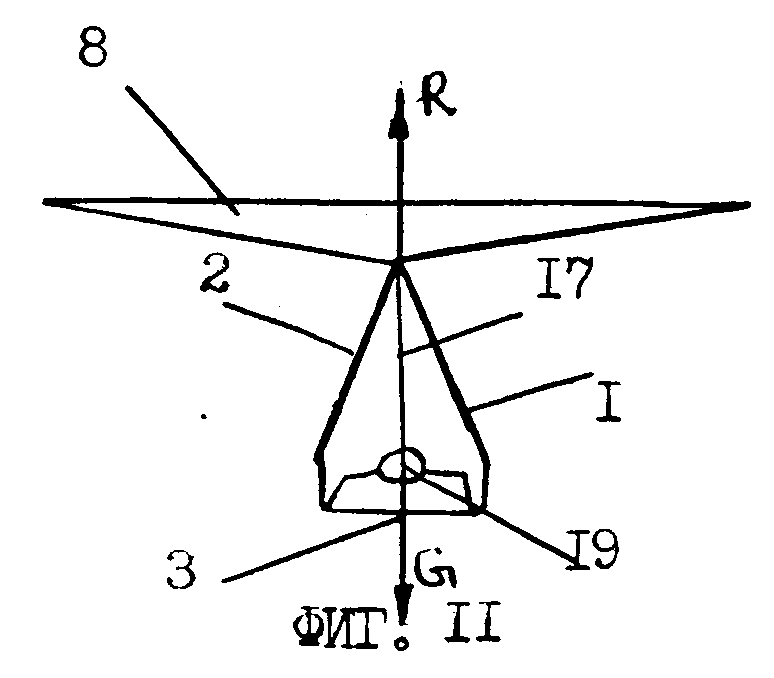
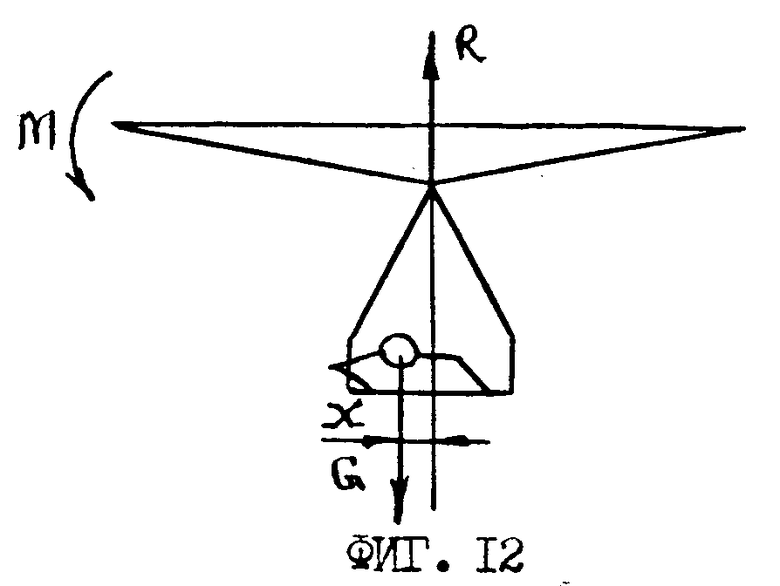
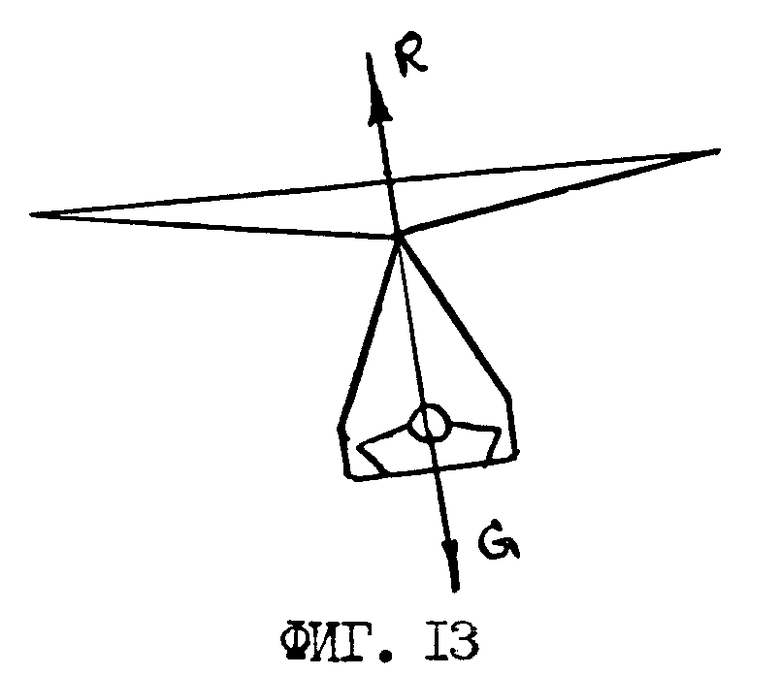
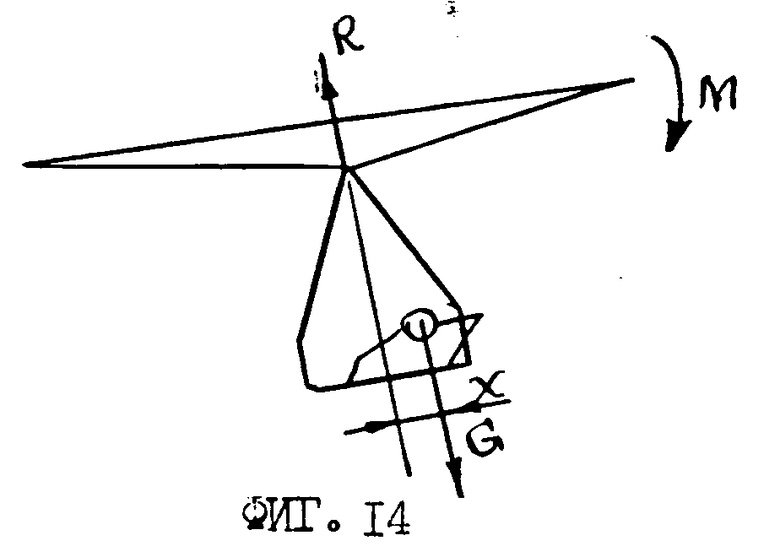
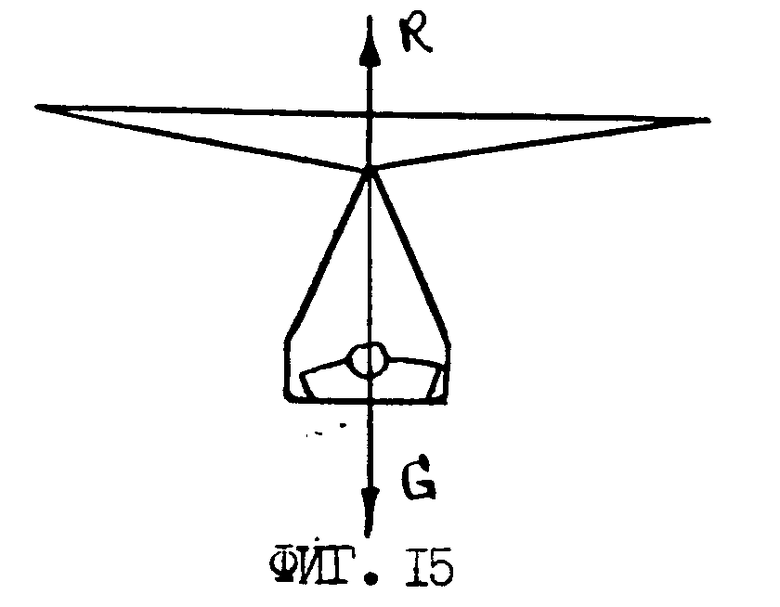
Предлагаемые решения поясняются чертежами, где на фиг. 1 изображен общий вид ротоплана с пилотом в момент набора высоты с работающими двигателями или положение на старте при неработающих двигателях или их отсутствии, со склона горы. На фиг. 2 изображен общий вид ротоплана с пилотом в горизонтальной ("лежачей") подвеске; на фиг. 3 изображен каркас со штангой и рулем поворота в трех ортогональных проекциях; на фиг. 4 изображен ротоплан с пилотом при взлете с работающими двигателями "с колена"; на фиг. 5 изображен ротоплан с пилотом при взлете с работающими двигателями из положения "лежа"; на фиг. 6 изображен ротоплан с пилотом при взлете с работающими двигателями в момент натяжения гибкой подвески пилота; на фиг. 7 изображен ротоплан с пилотом при взлете при неработающих двигателях или их отсутствии с ног со склона горы; на фиг. 8 изображен ротоплан при вертикальном спуске-подъеме; на фиг. 9 изображен ротоплан, когда пилот выполнил управляющее движение: сместил центр тяжести; на фиг. 10 изображена схема сил, возникшая после воздействия управляющего движения, изображенного на фиг. 9 (на фиг. 8, 9, 10 пилот изображен условно); на фиг. 11 изображена схема сил, действующих на ротоплан при вертикальном спуске-подъеме или прямолинейном движении; на фиг. 12 изображено управляющее воздействие пилота для выполнения поворота; на фиг. 13 изображена схема сил в промежуточный момент полета ротоплана после установившегося движения; на фиг. 14 изображено управляющее воздействие пилота для возврата ротоплана в режим прямолинейного движения; на фиг. 15 изображена схема сил после выполнения пилотом управляющего движения по фиг. 14; на фиг. 16 - схема, иллюстрирующая возможность управления пилотом ротопланом ногами в вертикальной подвеске; на фиг. 17 - схема, иллюстрирующая возможность управления пилотом ротопланом ногами в горизонтальной подвеске; на фиг. 18 изображена посадка ротоплана с пилотом на ноги пилота при наличии горизонтальной скорости; на фиг. 19 изображена схема возможных положений пилота, каркаса, штанги с рулем поворота, направления движения ротоплана, направления ветра.
Ротоплан состоит из каркаса, образованного совокупностью жестко соединенных между собой стержней 1, 2, 3, 4, 5 (фиг. 1, 2 и 3). Стержни 4 и 5, расположенные горизонтально в нижней части каркаса, выполняют функцию опоры ротоплана при его установке на поверхности земли и т.п.
В верхней части каркаса, образованной стержнями 1 и 2, расположена соединенная с этими стержнями вертикальная ось 6, на которой с возможностью вращения и с фиксацией от осевого перемещения смонтирована втулка 7. К втулке 7 посредством горизонтальных и вертикальных шарниров присоединены лопасти 8, на концах которых находятся реактивные двигатели 9.
Рядом с втулкой 7 по оси 6 установлена втулка 10, к которой жестко прикреплена одним своим концом радиально расположенная штанга 11. На другом конце штанги 11 вертикально и вдоль нее жестко закреплен руль поворота 12. На стержнях 1 и 4, 2 и 5 установлены поворачивающиеся рукоятки 13 и 14. Рукоятка 13 кинематически соединена с втулкой 10, что обеспечивает поворот втулки 10 со штангой 11 при вращении рукоятки 13. Рукоятка 14 кинематически соединена с механизмом 15 изменения шага лопастей 8, что обеспечивает возможность перевода на меньшие (и наоборот) углы атаки лопасти 8 для обеспечения полета в режиме авторотации и при работе двигателей соответственно. В рукоятке 14 можно совмещать управление подачей топлива и изменение шага лопастей 8. Кинематические связи рукояток 13 и 14 с втулкой 10 и механизмом 15 и двигателями 9 на чертежах не показаны.
К кронштейну верхней части каркаса может быть присоединена одна гибкая связь 17 (фиг. 1), выполненная в виде прочного шнура или стропа или т.н. гибкого элемента. Указанная связь 17 своим другим концом прикреплена к парашютной подвеске 18 пилота 19, что обеспечивает удержание пилота в висячем положении около каркаса в процессе полета ротоплана.
Количество гибких связей 20 может быть увеличено (фиг. 2), что позволит им удерживать пилота 19 в горизонтальном положении без каких-либо усилий с его стороны. В этом варианте в совокупности со связями 20 может быть использован блок 21, который может поворачиваться вместе со связями 20 вокруг вертикальной оси и обеспечивает связям 20 возможность беспрепятственного изменения соотношения длин своих концов, чтобы пилот из горизонтального положения мог переместиться в наклонное или вертикальное и наоборот.
Ротоплан работает следующим образом.
Ротоплан устанавливают на площадку на стержни 4, 5 каркаса (фиг. 1, 2, 4 и 5). Руль поворота 12 на штанге 11 посредством ручки 13, управляя положением втулки 10, жестко соединенной с штангой 11 и рулем поворота 12, устанавливают по ветру. Пилот 19 с одетой парашютной подвеской 18 прицепляется посредством гибкой связи 17 к прицепному устройству 16. Устанавливает ручкой 14 с помощью механизма 15 изменения шага лопастей минимальный шаг лопастей 8 и запускает реактивные двигатели 9. Пилот руками удерживает ротоплан за стержни 1 и 2 каркаса. После набора расчетного числа оборотов ротоплан начинает набирать высоту и натягивает гибкую связь 17 (см. фиг. 1, 6). Взлет можно также выполнять из положения "лежа" в подвеске (см. фиг. 2, 5). Схема управляющих действий описана выше. Пилот увеличивает ручкой 14 шаг лопастей 8 (фиг. 2). Увеличивает подачу топлива в двигатели 9 ручкой 14 (два органа управления могут быть объединены в одной ручке "шаг-газ"). Начинает набор высоты. После набора высоты пилот 19 выключает двигатель 9 и ручкой 14 посредством механизма 15 изменения шага лопастей 8 переводит шаг лопастей 8 на режим авторотации и продолжает полет в планирующем режиме.
Способ управления полетом ротоплана осуществляют таким образом. При работающих двигателях или в планирующем полете управление ротопланом производится путем воздействия пилотом руками на стержни 1, 2, 3 каркаса. Подтягивая или отталкивая каркас, пилот 19 меняет центр тяжести системы, что приводит к появлению горизонтальной составляющей движущей силы. Например, пилот 19 в полете потянул за стержни 1, 2 или 3 каркаса на себя (см. фиг. 8, 9, 10), центр тяжести системы "G" сместился по отношению к равнодействующей всех аэродинамических сил "R" на величину "X" (фиг. 9). Образовался вращающий момент, который воздействуя через руки пилота, стержни 1, 2 или 3 каркаса, через ось 6 на плоскость вращающихся лопастей 8 ротора, наклоняет его в сторону смещения центра тяжести (фиг. 10). Появляется горизонтальная составляющая "F" движущей силы и ротоплан начинает движение в сторону смещения центра тяжести. Пилот 19 отталкивает каркас от себя - скорость поступательного движения уменьшается, вплоть до остановки и движения назад. Аналогично выполняются повороты влево и вправо (см. фиг. 11-15). Следует отметить, что система в полете находится в положении устойчивого равновесия и при выведении из этого состояния, для выполнения поступательного движения, усилия на ручке управления будут стремиться вернуть систему в исходное положение.
На фиг. 11 пилот 19 осуществляет вертикальный подъем. На фиг. 12 пилот 19 сместился вправо, образуется момент, наклоняющий плоскость вращения лопастей 8 ротора в сторону смещения. На фиг. 13 устройство продолжает вертикальный подъем вправо. На фиг. 14 пилот смещается влево, выводя ротоплан из равновесия, и ротоплан снова возвращается в режим вертикального подъема (см. фиг. 15).
Управление в полете может осуществляться как руками, так и ногами, как в вертикальной подвеске, так и в горизонтальной подвеске. Освободившиеся руки могут быть применены для выполнения других работ (например фото и киносъемки) (см. фиг. 16, 17). Причем, никакая грубая ошибка в пилотировании не сможет привести к сваливанию в штопор или к неуправляемому пикированию. Устройство обладает устойчивым полетом на любых углах атаки по отношению к ротору в целом.
В полете пилот 19 (см. фиг. 19) может в соответствии с требованиями полета или своими желаниями ориентировать свое тело, каркас в требуемом направлении, причем независимо друг от друга. Воздействуя на стержни 1, 2, 3, 4, 5 каркаса своими конечностями, пилот 19 разворачивает свое тело в любом направлении, оставляя положение каркаса и руля поворота неизменными. Пилот 19, также по желанию, осуществляет поворот своего тела вместе с каркасом в требуемом направлении в том числе и назад, воздействуя на ручку 13 (см. фиг. 2) посредством кинематической цепи (на чертежах не показана), соединенной с втулкой 10, через штангу 11, как бы опираясь на руль 12 поворота.
Посадка выполняется в зависимости от условий, желания и квалификации пилота. При работающих двигателях - это схема, изображенная на фиг. 1 и 6, на ноги, на стержни 4 и 5 каркаса при нахождении пилота в положении "лежа" (фиг. 5). В авторотирующем режиме (при неработающих двигателях) - при планировании горизонтальную скорость уменьшают на небольшой высоте резким увеличением угла атаки несущего винта. Вертикальную скорость уменьшают на небольшой высоте увеличением с помощью ручки 14 посредством механизма 15 изменения шага лопастей 8, что, кроме того, позволит затормозить вращение лопастей 8 после касания пилотом 19 ногами земли. Преждевременное выполнение увеличения шага лопастей в авторотирующем режиме может привести к тяжелым последствиям.
Для ротоплана, не имеющего двигателей, предназначенного только для выполнения планирующих полетов, можно выполнять взлет по схеме, изображенной на фиг. 7. Пилот 19 устанавливает ротоплан на склоне горы. Восходящий поток, образующийся возле склона горы, раскручивает лопасти 8 ротора до расчетного числа оборотов. Затем пилот 19 при сильном ветре, удерживая ротоплан руками за стержни 1 и 2 каркаса, выполняет взлет с места или, при слабом ветре, сделав несколько шагов. Полет и посадка описаны выше.
Возможность ориентации пилота 19 вместе с каркасом или независимо от него (см. фиг. 19) необходима для того, чтобы пилот 19 мог поворачиваться вокруг своей вертикальной оси в ту сторону, куда летит или должен лететь ротоплан. При этом пилот 19 может не менять своего вертикального или горизонтального положения тела. Естественно, что при выполнении указанной ориентации (т. е. при повороте пилота 19 вокруг своей вертикальной оси) вместе с каркасом, он может быть обращен к каркасу передом, боком, задом и т.д. Обращение (направление, разворот) пилота 19 в любую сторону полета необходимо для максимального удобства управления полетом и для соблюдения эргономического соответствия ориентации пилота относительно направления полета. При этом лишь при управляемом повороте ручки управления 13, соединенной кинематической цепью с вращаемой на оси 6 втулке 10 штанги 11 с рулем поворота 12, пилот 19 будет иметь достаточную свободу для своей ориентации в требуемом направлении полета вместе с каркасом.
Т.к. указанная ориентация пилота 19 осуществляется путем поворота его на указанной связи 17 вокруг вертикальной оси, то при отсутствии возможности воздействовать на каркас посредством ручки управления 13, как бы опираясь на руль поворота 12, пилот 19 сможет выполнять поворот вокруг вертикальной оси только благодаря наличию управляемой поворотом втулки 10 ручкой 13 вынесенного на штанге 11 руля поворота 12. Поворот пилота 19 вместе с каркасом (руль поворота 12 остается на том же месте или немного отходит в зависимости от наличия ветра или поступательной скорости ротоплана в этот момент). Например, при посадке при наличии бокового ветра и горизонтальной скорости пилот может развернуть свое тело и каркас по направлению движения (см. фиг. 19). На фиг. 19 показана схема, на которой изображены вектор ветра "i", и возможные управляемые взаимоположения, направления "e" полета, направления "g" продольной оси пилота 19, направления "f" штанги 11 с рулем поворота 12, направления "d" продольной оси каркаса.
Как видно, положением направлений, обозначенных символами "d", "e", управляют с помощью вынесенной на штанге 11 с поворотной втулкой 10, закрепленной к оси 6 с возможностью поворота, и управляемое ручкой 13 руля поворота 12. Положением направления "g" управляют благодаря наличию гибкой связи 17 и ее определенному размеру "a". Это значительно расширяет эксплуатационные возможности устройства.
| название | год | авторы | номер документа |
|---|---|---|---|
| БИОАЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 2009 |
|
RU2392189C1 |
| ИНДИВИДУАЛЬНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2010 |
|
RU2422328C1 |
| ВЕРТОЛЕТ С ВОДЯНЫМИ РЕАКТИВНЫМИ УСТРОЙСТВАМИ (ВАРИАНТЫ) | 2007 |
|
RU2344967C1 |
| САМОЛЕТ ВЕРТИКАЛЬНОГО ВЗЛЕТА И ПОСАДКИ С НЕСУЩИМ ВИНТОМ СО СВОРАЧИВАЮЩИМИСЯ УБИРАЕМЫМИ ЛОПАСТЯМИ | 2019 |
|
RU2727787C1 |
| Гидросамолет вертикального взлета и посадки с несущим винтом со сворачивающимися убираемыми лопастями | 2021 |
|
RU2781817C1 |
| НАРОДНЫЙ ВЕРТОЛЕТ 21 ВЕКА КАН 21 (ВАРИАНТЫ) | 2007 |
|
RU2364550C2 |
| Устройство сверхлегкого складного автожира | 2017 |
|
RU2659716C1 |
| УСТРОЙСТВО ДЛЯ СПУСКА С ВЫСОТНЫХ ОБЪЕКТОВ ПРИ ПОМОЩИ АВТОРОТАЦИИ | 2021 |
|
RU2757464C1 |
| ДИРИЖАБЛЬ | 2014 |
|
RU2550797C1 |
| Дельтаплан | 1980 |
|
SU973410A1 |
Изобретение может быть использовано для индивидуальных полетов в атмосфере. Ротоплан состоит из каркаса, включающего стержни, и ротора с лопастями, установленного вертикально в верхней части каркаса. С каркасом соединен руль поворота ротоплана, имеющий возможность поворота на угол, больший 360o, вокруг оси ротора. Для удержания пилота на расстоянии действия по меньшей мере одной из конечностей на каркасе закреплена гибкая связь. Она также обеспечивает любое положение пилота и возможность его перемещения в любом направлении для управления ротопланом. При перемещении пилот может менять силовое воздействие своих конечностей на элементы каркаса, тем самым смещая центр тяжести системы ротоплан - пилот от вертикальной оси ротора, что вызывает соответствующий наклон ротоплана и появление силы, вынуждающей ротоплан перемещаться в направлении действия этой силы. Пилот может совершать взлет, полет и посадку в любом направлении, развернув каркас и себя самого в необходимом направлении. Ротоплан при том же аэродинамическом качестве, что и у дельтапланов, не имеет опасного режима пикирующего полета. 2 с и 2 з.п. ф-лы, 19 ил., 1 табл.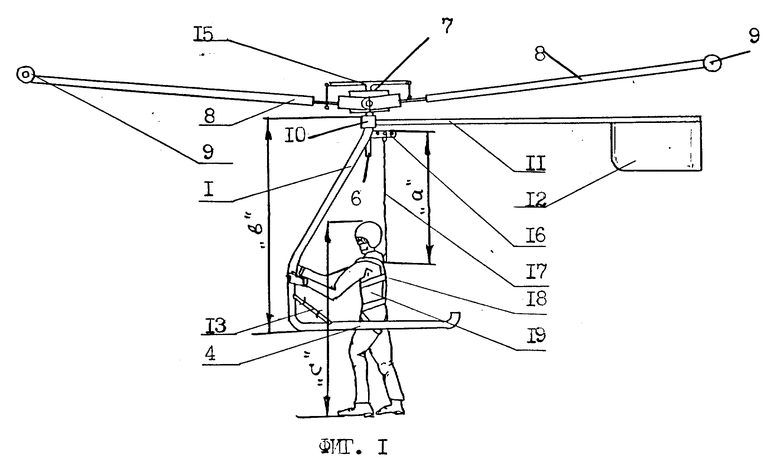
| Горбенко К.С., Макаров Ю.В | |||
| Самолеты строим сами | |||
| - М.: Машиностроение, 1989, с.180 и 181 | |||
| Способ определения товарного сорта сферментированного табака | 1984 |
|
SU1253585A1 |
| GB 1405164 A, 03.09.75 | |||
| US 5370341 A, 06.12.94 | |||
| US 3474987 A, 24.07.67 | |||
| US 4653705 A, 31.03.87 | |||
| СПОСОБ ЗАЖИГАНИЯ И ГОРЕНИЯ ДУГИ ПОСТОЯННОГО ТОКА | 2003 |
|
RU2251473C1 |
| Вертолет | 1991 |
|
SU1819809A1 |

