Изобретение относится к лазерной локации, а также к системам транспортировки и доставки мощного излучения на воздушные и космические объекты.
Преимущественная область использования изобретения - очистка космического околоземного пространства от различных малоразмерных объектов, представляющих опасность для современных космических аппаратов и спутников.
Известны системы автоматического наведения и сопровождения движущихся целей, основанные на частотном, фазовом, амплитудном, на времяимпульсном и на амплитудно-фазовом принципах, которые могут быть использованы для подсвета объекта [1].
Известные координаторы формируют сигналы, пропорциональные составляющим угла рассогласования в двух взаимно перпендикулярных плоскостях управления. Эти сигналы поступают на следящий привод системы автоматического сопровождения цели, осуществляющий перемещение оптической системы координатора так, что в любой момент времени оптическая ось направлена на цель (Криксунов Л.3., Усольцев И.Ф. Инфракрасные системы. / М.: Сов. Радио, 1968, стр.157-239) [1].
Наиболее близким устройством того же назначения по совокупности признаков к заявляемому изобретению является способ доставки излучения на движущийся объект, заключающийся в определении в момент времени t0 угловых координат  , дальности R(t0) и скорости
, дальности R(t0) и скорости  объекта относительно первой заданной точки пространства A1 в системе координат, связанной с платформой летательного аппарата (ЛА), движущейся относительно источника рабочего излучения, расположенного на земной поверхности, определении расстояния между платформой ЛА и источником рабочего излучения, расположенного на земной поверхности, формировании вспомогательного излучения посредством источника вспомогательного излучения, расположенного на платформе летательного аппарата, формировании рабочего излучения посредством обращения волнового фронта (ОВФ) вспомогательного излучения, наведения оси рабочего излучения из первой заданной точки пространства A1 в точку ожидаемого нахождения объекта с координатами вектора
объекта относительно первой заданной точки пространства A1 в системе координат, связанной с платформой летательного аппарата (ЛА), движущейся относительно источника рабочего излучения, расположенного на земной поверхности, определении расстояния между платформой ЛА и источником рабочего излучения, расположенного на земной поверхности, формировании вспомогательного излучения посредством источника вспомогательного излучения, расположенного на платформе летательного аппарата, формировании рабочего излучения посредством обращения волнового фронта (ОВФ) вспомогательного излучения, наведения оси рабочего излучения из первой заданной точки пространства A1 в точку ожидаемого нахождения объекта с координатами вектора  посредством первого блока наведения, расположенного на платформе летательного аппарата, отличающийся тем, что до формирования вспомогательного излучения посредством источника вспомогательного излучения, расположенного на платформе летательного аппарата, осуществляют наведение оси источника вспомогательного излучения, расположенного на платформе летательного аппарата, на ось источника рабочего излучения, расположенного на земной поверхности, осуществляют определение пространственных координат вектора направленности
посредством первого блока наведения, расположенного на платформе летательного аппарата, отличающийся тем, что до формирования вспомогательного излучения посредством источника вспомогательного излучения, расположенного на платформе летательного аппарата, осуществляют наведение оси источника вспомогательного излучения, расположенного на платформе летательного аппарата, на ось источника рабочего излучения, расположенного на земной поверхности, осуществляют определение пространственных координат вектора направленности  оси источника рабочего излучения относительно первой заданной точки пространства A1 в момент времени t1, определяют координаты первого вектора разности
оси источника рабочего излучения относительно первой заданной точки пространства A1 в момент времени t1, определяют координаты первого вектора разности  между координатами вектора
между координатами вектора  точки ожидаемого нахождения объекта и координатами вектора направленности
точки ожидаемого нахождения объекта и координатами вектора направленности  оси источника рабочего излучения относительно первой заданной точки пространства A1
оси источника рабочего излучения относительно первой заданной точки пространства A1
 ,
,
осуществляют наведение выходной оси первого блока наведения, расположенного на платформе летательного аппарата, в первую уточненную точку ожидаемого нахождения объекта с координатами  , равными первому вектору разности
, равными первому вектору разности 
 ,
,
осуществляют контроль точности наведения излучения на объект путем определения вектора  ошибки наведения излучения на объект в момент прихода излучения на объект, осуществляют компенсацию измеренной ошибки наведения путем наведения выходной оси первого блока наведения, расположенного на платформе летательного аппарата, во вторую уточненную точку ожидаемого нахождения объекта с пространственными координатами
ошибки наведения излучения на объект в момент прихода излучения на объект, осуществляют компенсацию измеренной ошибки наведения путем наведения выходной оси первого блока наведения, расположенного на платформе летательного аппарата, во вторую уточненную точку ожидаемого нахождения объекта с пространственными координатами  , равными сумме координат первой уточненной точки ожидаемого нахождения объекта и координат вектора
, равными сумме координат первой уточненной точки ожидаемого нахождения объекта и координат вектора  ошибки наведения излучения на объект
ошибки наведения излучения на объект
 ,
,
осуществляют смещение оси источника вспомогательного излучения, расположенного на платформе летательного аппарата, параллельно самой себе в плоскости, перпендикулярной этой оси, на величину, пропорциональную расстоянию от платформы ЛА до источника рабочего излучения, расположенного на земной поверхности, и величине скорости платформы ЛА относительно источника рабочего излучения, расположенного на земной поверхности, в момент времени формирования импульсов вспомогательного излучения определяют координаты вектора направления оси источника рабочего излучения  в системе координат, связанной с первой заданной точки A1, определяют координаты второго вектора разности
в системе координат, связанной с первой заданной точки A1, определяют координаты второго вектора разности  между ранее определенным вектором направленности оси источника рабочего излучения
между ранее определенным вектором направленности оси источника рабочего излучения  в момент времени t1 и вектором направления оси источника рабочего излучения
в момент времени t1 и вектором направления оси источника рабочего излучения  , координаты которого определены в момент времени формирования импульса вспомогательного излучения
, координаты которого определены в момент времени формирования импульса вспомогательного излучения  , на основании полученных величин пространственных координат второго вектора разности формируют компенсирующий угловой сдвиг, пропорциональный величинам пространственных координат второго вектора разности , осуществляют введение компенсирующего углового сдвига в направление распространения рабочего излучения в момент времени его прихода на платформу ЛА, осуществляют наведение рабочего излучения из первой заданной точки пространства A1 во вторую уточненную точку ожидаемого нахождения объекта с пространственными координатами
, на основании полученных величин пространственных координат второго вектора разности формируют компенсирующий угловой сдвиг, пропорциональный величинам пространственных координат второго вектора разности , осуществляют введение компенсирующего углового сдвига в направление распространения рабочего излучения в момент времени его прихода на платформу ЛА, осуществляют наведение рабочего излучения из первой заданной точки пространства A1 во вторую уточненную точку ожидаемого нахождения объекта с пространственными координатами  посредством первого блока наведения, расположенного на платформе летательного аппарата, при этом суммирование векторов и их координат осуществляют по правилам суммирования векторных величин, каждый вектор характеризуется угловыми координатами направления своей оси относительно главной оси используемой системы координат с центром в первой заданной точке пространства A1 (RU 2191406, G01S 17/00, 2002.10.20).
посредством первого блока наведения, расположенного на платформе летательного аппарата, при этом суммирование векторов и их координат осуществляют по правилам суммирования векторных величин, каждый вектор характеризуется угловыми координатами направления своей оси относительно главной оси используемой системы координат с центром в первой заданной точке пространства A1 (RU 2191406, G01S 17/00, 2002.10.20).
Недостатком способа является то, что при значительных внешних воздействиях (тепловых, механических, старение) первоначальное взаимное положение оси вспомогательного излучения и оси резонатора лазера нарушается неопределенным образом и возникает ошибка, величина которой неизвестна.
Технический результат заключается в повышении точности наведения лазера.
Для достижения этого результата предлагается способ наведения лазерного луча, заключающийся в формировании сигнала пеленга, при этом
- в оптический тракт между лазером и фотоприемником вводят вспомогательный двунаправленный пучок оптического (маркерного) излучения, распространяющийся от места ввода в оптически сопряженных направлениях:
- в одном направлении пучок идет к резонатору лазера, формируя для фотоприемника сигнал с информацией о положении оптической оси резонатора лазера,
- в другом направлении - опорном - пучок идет к фотоприемнику, где измеряется рассогласование между положениями диагностического, опорного и пеленгационного сигналов, на основании чего осуществляют управление оптическим узлом, служащим выходным для лазерного излучения и входным для сигнала пеленга (первый вариант),
и способ наведения лазерного луча, заключающийся в формировании сигнала пеленга, при этом
- в оптический тракт между оптическим узлом, служащим выходным для лазерного излучения и входным для сигнала пеленга, и лазером вводят вспомогательный двунаправленный пучок оптического излучения, распространяющийся от места ввода в оптически сопряженных направлениях:
- в одном направлении пучок оптического излучения идет через узел оптического деления пучка, где разделяется на опорный и диагностический пучки, причем диагностический пучок направляется через управляемый оптический элемент к резонатору лазера, формируя для фотоприемника вспомогательного излучения, подключенного к узлу оптического деления сигнала пучка, сигнал с информацией о положении оптической оси резонатора лазера, а опорный пучок также направляют на фотоприемник вспомогательного излучения, на котором определяют положение оси опорного пучка, причем сигналом рассогласования между опорным и отраженным пучками с фотоприемника осуществляют управление управляемым оптическим элементом,
- в другом направлении вспомогательный пучок оптического излучения идет к оптическому узлу, служащему выходным для лазерного излучения и входным для сигнала пеленга, и поступает на пеленгационный фотоприемник, на котором обозначает опорное направление, а сигнал рассогласования между пеленгом цели и опорным направлением используется для управления оптическим узлом, служащим входным для пеленгационного сигнала и выходным для лазерного излучения (второй вариант).
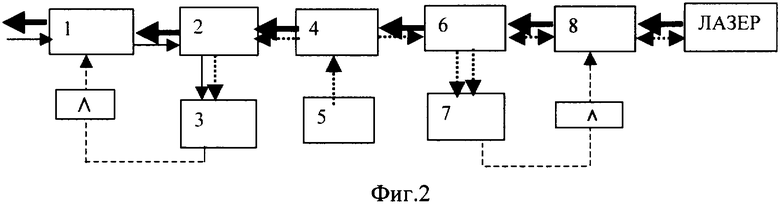
На фиг.1 приведена структурная функциональная схема устройства, реализующего первый вариант способа.
На фиг.2 приведена структурная функциональная схема устройства, реализующего второй вариант способа.
На фиг.1:
1 - СкУ - сканирующий узел, содержащий оптический элемент, служащий входным для приема пеленгационных сигналов и выходным для лазерного излучения; как правило, для обслуживания рабочей зоны прибора сканирующий узел имеет один или несколько сканирующих оптических элементов, которые являются исполнительными элементами контура управления, использующим сигналы рассогласования, полученные на ФП;
2 - ОпУ1 - оптический узел (спектральный и/или апертурный делитель), пропускающий на выход (к СкУ) лазерное излучение, направляющий к фотоприемнику пеленгационный сигнал и вспомогательное излучение;
3 - ФП - координатный фотоприемник пеленгационных сигналов и вспомогательного излучения;
4 - ОпУ2 - оптический узел, разводящий вспомогательное излучение по двум оптически сопряженным направлениям:
- по одному направлению излучение направляется на фотоприемник ФП, на котором отмечает положение опорного направления;
- по другому направлению излучение направляется к лазеру, где отражается от оптического элемента, определяющего или задающего положение оси резонатора лазера, и после отражения направляется на фотоприемник ФП, где отмечает отраженное направление.
5 - ИВИ - источник вспомогательного излучения (существенно высокочастотный или непрерывный, спектр его попадает в спектральный диапазон пеленгационного фотоприемника).
Положения пеленгационного, опорного и отраженных направлений, получаемые на фотоприемнике ФП, позволяют однозначно определить положение направления лазерного излучения относительно пеленга цели.
На фиг.2:
1 - СкУ1 - сканирующий узел, содержащий оптический элемент, служащий входным для приема пеленгационных сигналов и выходным для лазерного излучения. Как правило, для обслуживания рабочей зоны прибора сканирующий узел имеет один или несколько сканирующих оптических элементов, которые являются исполнительными элементами контура управления, использующего сигналы рассогласования, полученные на ФП1,
2 - ОпУ1- оптический узел (спектральный и/или апертурный делитель), пропускающий на выход (к СкУ1) лазерное излучение, направляющий к фотоприемнику пеленгационный сигнал и вспомогательное излучение,
3 - ФП1 - координатный фотоприемник пеленгационных сигналов и вспомогательного излучения,
4 - ОпУ2 - оптический узел, разводящий вспомогательное излучение по двум оптически сопряженным направлениям,
5 - ИВИ - источник вспомогательного излучения (существенно высокочастотный или непрерывный, спектр его попадает в спектральный диапазон пеленгационного фотоприемника ФП1),
6 - ОпУ3 - оптический узел, пропускающий лазерное излучение, делящий вспомогательное излучение на два: опорный и диагностический,
7 - ФП2 - координатный фотоприемник вспомогательного излучения,
8 - СкУ2 - сканирующий узел, содержащий один или несколько сканирующих оптических элементов, которые являются исполнительными элементами контура управления, использующего сигналы рассогласования, полученные на ФП2.
Функционирование устройств происходит согласно соответствующим способам.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ динамического контроля соосности пеленгационных и лазерных каналов | 2022 |
|
RU2805284C1 |
| СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНЫХ ПУЧКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2744040C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2191406C1 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2541505C2 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПАРАМЕТРОВ ЛАЗЕРНОГО ПОЛЯ УПРАВЛЕНИЯ ИНФОРМАЦИОННОГО КАНАЛА | 2003 |
|
RU2248534C1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА ПОИСКА И СОПРОВОЖДЕНИЯ ЦЕЛИ | 2007 |
|
RU2335728C1 |
| СПОСОБ ДОСТАВКИ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270523C1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2124740C1 |
| Способ оптико-электронного наведения и дистанционного подрыва управляемой ракеты и комплексированная система для его реализации | 2022 |
|
RU2791420C1 |
Заявленное изобретение относится к способу наведения лазерного луча. Заявленный способ основан на одновременном детектировании на одном фотоприемнике трех сигналов - опорного, диагностического и пеленгационного. Управление лазерным лучом осуществляют на основании измеренного рассогласования указанных трех сигналов. Технический результат: повышение точности наведения лазера. 2 н.п. ф-лы, 2 ил.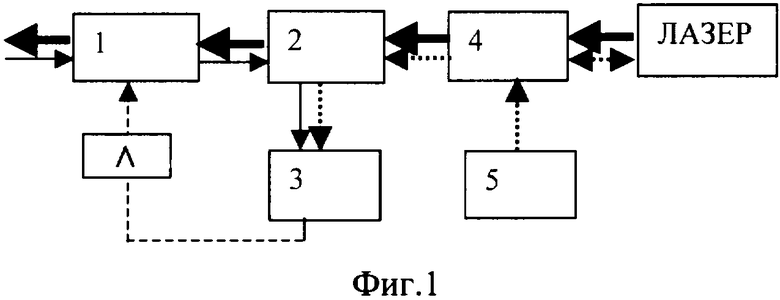
в оптический тракт между лазером и пеленгационным фотоприемником вводят вспомогательный двунаправленный пучок оптического излучения, распространяющийся от места ввода в оптически сопряженных направлениях:
в одном направлении - диагностическом - пучок идет к резонатору лазера, формируя для фотоприемника сигнал с информацией о положении оптической оси резонатора лазера,
в другом направлении - опорном - пучок идет к фотоприемнику, где измеряется рассогласование между положениями диагностического, опорного и пеленгационного сигналов, на основании чего осуществляют управление оптическим узлом, служащим выходным для лазерного излучения и входным для сигнала пеленга.
в оптический тракт между оптическим узлом, служащим выходным для лазерного излучения и входным для сигнала пеленга, и лазером вводят вспомогательный двунаправленный пучок оптического излучения, распространяющийся от места ввода в оптически сопряженных направлениях:
в одном направлении пучок оптического излучения идет через узел оптического деления пучка, где разделяется на опорный и диагностический пучки, причем диагностический пучок направляется через управляемый оптический элемент к резонатору лазера, формируя для фотоприемника вспомогательного излучения, подключенного к узлу оптического деления пучка, сигнал с информацией о положении оптической оси резонатора лазера, а опорный пучок также направляют на фотоприемник вспомогательного излучения, на котором определяют положение оси опорного пучка, причем сигналом рассогласования между опорным и отраженным пучками с фотоприемника осуществляют управление управляемым оптическим элементом,
в другом направлении вспомогательный пучок оптического излучения идет к оптическому узлу, служащему выходным для лазерного излучения и входным для сигнала пеленга, и поступает на пеленгационный фотоприемник, на котором обозначает опорное направление, а сигнал рассогласования между пеленгом цели и опорным направлением используется для управления оптическим узлом, служащим входным для пеленгационного сигнала и выходным для лазерного излучения.
| УСТРОЙСТВО ДЛЯ НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ | 1990 |
|
RU2033629C1 |
| УСТРОЙСТВО НАВЕДЕНИЯ ЛАЗЕРНОГО ЛУЧА | 2001 |
|
RU2224270C2 |
| СПОСОБ НАВЕДЕНИЯ ЛАЗЕРНОГО ИЗЛУЧЕНИЯ НА ОБЪЕКТ | 1991 |
|
RU2042156C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ ОПТИКО-ЛОКАЦИОННАЯ СИСТЕМА | 2005 |
|
RU2292566C1 |
| JP 2000206243 A, 07.01.1999. | |||

