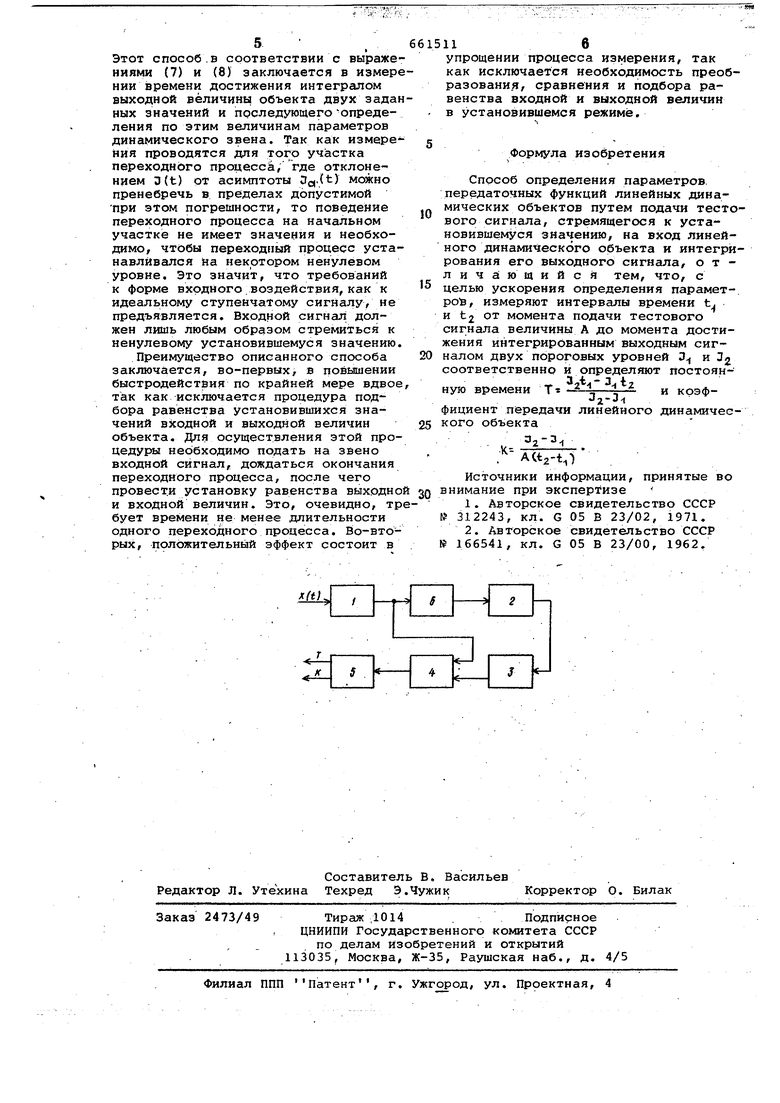
(54) СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ дейст1вия уменьшено. Измерение посто янной времени осуществляется в результате интегрирования разности входного и выходного сигналов звена при условии равенства их установившихся значений. Недостатками этого способа являются существенное увели чение времени измерения, а также ег сложность, обусловленные тем, что перед измерением постоянной времени необходимо осуществить подбор равен ства установившихся значений сигнал .на входе и выходе звена, для чего,в первых, требуется по крайней мере столько же времени, сколько и для самого процесса определения постоян ной времени, во-вторых, необходимо иметь преобразователь параметра аПериодичесгсого звена к. одинаковой физической природе- с выходным параметром, в-третьих, величина статического коэффициента звена остается неизвестной в результате всех проделанных операций. Целью изобретения является ускорение определения параметров. Эта цель достигается тем, что по предложенному способу измеряют интервалы времени t и t2OT момента подогчи тестового сигнала величины А до момента достижения интегрированным выходным сигналом двух пороговы уровней 3 и Og соответственно определяют постоянную времени . И коэффициент пё Ьедач 1 т -I. линейного динамического объекта |/ . l -ACtg-V Структурная схема устройства, 1зеализую1цеГо способ, дана на чертеже Устройство содержит формирователь входного сигнала 1, интегратор 2, компаратор 3, измеритель интервалов времени 4- и вычислительный блок 5. Определениепостоянной времени Т и коэффициента передачи К контролируемого объекта 6 первого порядка происходит следующим образом. . Входное- воздействие с выхойа фор мирова,теля 1 подается на вход объек та. Одновременно с этим подается си нал на запуск измерителя интервалов врём«гни-. Выходной сигнал объекта интегрируется и значение интеграла на выходе интегратора контролируется гйэ-двум заданным значениям компа ратором. В моменты достижения интегралом каждого заданного значения KOMnapaiTop останавливает отсчёт соответствующего интервала времени измерителем интервалов времени. По этим измеренным интервалам времени и заданным значениям порого.внх уров ней компаратора вычислительный блок определяет постоянную времени Т и коэффициент передачи К объекта. Рассмотрим обоснЪва«ие предложен ноге способа. 1 . .4 .. . Обозначим: у - выходная координата апериодическо.го объекта, X - входное воздействие, t - текущее время. Все нижеприведенные рассуждения справедливы в предположении,что форма входного сигнала произвольна, при условии, что сигнал имеет ненулевое установившееся значение. Для определенности и удобства рассуждения будем полагать, что на входе объекта действует возмущение в виде идеального скачка.величины А. Тогда реакция апериодического звена, описываемого уравнением КХ, имеет вид. ( КЛ(1-е ), . (2) где ё - основание натуральных логарифмов.. Интегрируя этот процесс с нулевыми начаатьными условиями, получим -i (Jt Ak(, (3) Как видно из последнего выражения, .D(t) при- асимптотически приближается к прямой (t-T),(4) уравнение которой содержит в качестве параметров в.еличины К и Т. Необходимо отметить существенную особенность этой прямой: точка, в которой прямая пересекает ось времени, есть постоянная времени звена и ее положение не зависит от коэффициента усиления звена. Так как кривая Зд (t) при сколь угодно близко бопадает со своей асимптотой, то из этого следует возможность определения положения асимптоты измерением координаты точек 3(t) при доста.точно большом t. По этим, координатам определяют величины Кит..; Таким образом, при t Т имеем е «1. Тогда с требуемой точностью имеет место равенство a(-t1 aQ((t-T).; 5 Проводя измерения t и tj,соответствующие значениям з и получим 3,KA(-fc,-T), a2 KA(t2-T% откуда, исключая поочередно К и Т, имеем - . . . 3-,-л, ... Д2-з дизИз последних соотнсяиений непосредственно следует способ .определения постоянной времени, и коэффициента передачи апериодического объекта. Этот способ.в соответствии с выраже ниями (7) и (8) заключается в измер нии времени достижения интегралом выходной величины объекта двух зада ных значений и последующего определения по этим величинам параметров динамического звена. Так как измере ния проводятся для того участка переходного процесса, где отклонением D(t) от асимптоты Oc(.(t) MOJKHO пренебречь в пределах допустимой при этом погрешности, то поведение переходного процесса на начальном участке не имеет значения и необходимо, чтобы переход 1ый процесс уста навливался йа некотором ненулевом уровне. Это значит, что требований к форме входйого воздействия, как к идеальному ступенчатому сигналу, не предъявляется. Входной сигнал должен лишь любым образом стремиться к ненулевому установившемуся значению Преимущество описанного способа заключается, во-первых, в повышении быстродействия по крайней мере вдвое так как исключается процедура подбора равенства установившихся значений входной и выходной величин объекта. Для осуществления этой процедуры необходимо подать на звено входной сигнал, дождаться окончания переходного процесса, после чего провести установку равенства выходно и входной величин. Это, очевидно, тр бует времени не менее длительности одного переходного процесса. Во-вторых, положительный эффект состоит в упрощении процесса измерения, так как исключается необходимость преобразования, сравнения и подбора равенства входной и выходной величин в установившемся режиме. Формула изобретения Способ определения параметров передаточных функций линейных динамических объектов путем подачи тестового сигнала, стремящегося к установившемуся значению, на вход линейного динамического объекта и интегрирования его выходного сигнала, отличающийся тем, что, с целью ускорения определения параметров, измеряют интервалы времени t, и t от момента подачи тестового сигнала величины А до момента достижения интегрированным выходным сигналом двух пороговых уровней 3 и 2 соответственно и определяют постоян 3,t.-3. tz ную времени Т - и крэффициент передачи линейного динамического объекта Att2-tO Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 312243, кл. G 05 В 23/02, 1971. 2. Авторское свидетельство СССР 166541, кл. G 05 В 23/00, 1962.