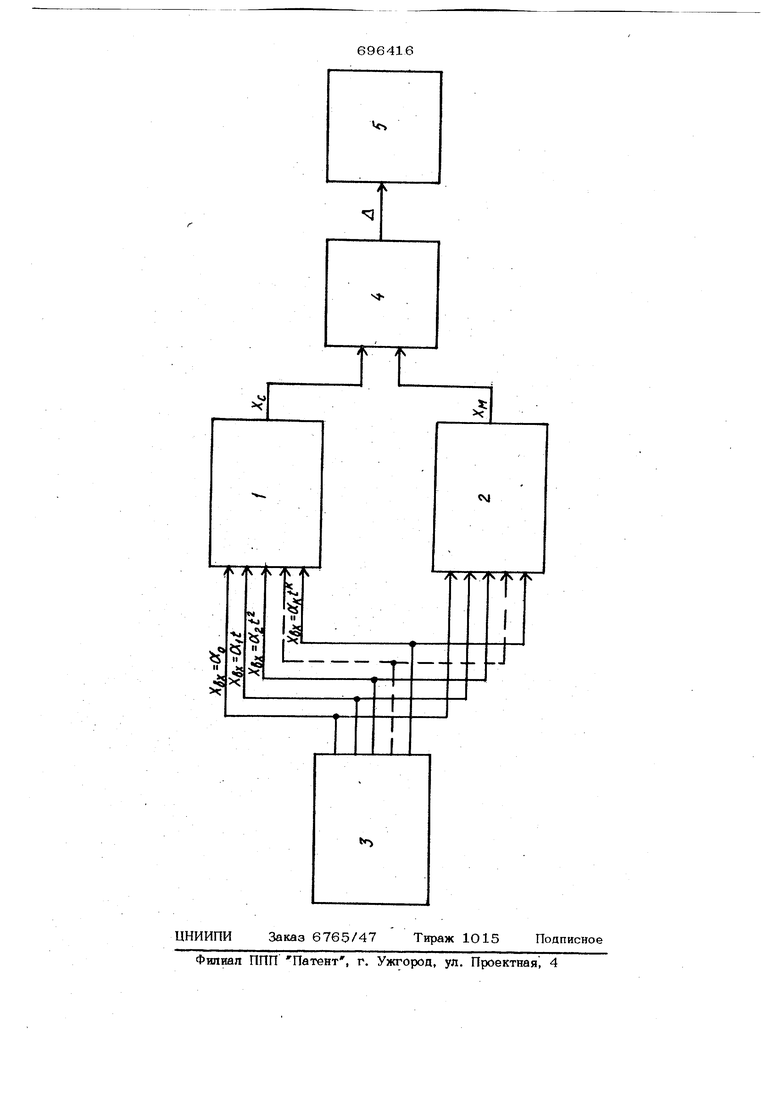
Изобретение относится к области автоматики, а именно, к измерительной технике и автоматическому регулировани и может быть использовано при наладке различных промышленных систем автоматического регулирования. Известен способ определения коэффициентов передаточных функций, основанный на том, что на вход исследуемого звена подают короткий пульс, а затем определяют площадь (интеграл), ограниченную выходным сигналом. Постояиная времени определяется по величине этой площади il. Недостатком известного способа является низкая точность в определении коэффициентов передаточных функций при второй и более высоких производньгх. При появлении случайных ощибок в начал вычисления (например, ошибка в вычисл нии первого интеграла) последняя будет накапливаться при вычислении последующих интегралов. Известен также способ определения коэффициентов передаточных функций,. который заключается в том, что тестовой сигнал пропускают последовательно через синтезатор и исследуемую систему (первый канал) и через синтезатор (второй канал) 2. Недостатком известного способа является большая длительность процесса поиска коэффициентов передаточной функции исследуемой системы. . Известен также способ определения коэффициентов передаточных функций снстем регулирования, при котором тестовый сигнал одновременно подают на вход исследуемой системы и модели з. Недостатком известного способа является то, что коэффициенты передаточных функций при высоких степенях производных будут определяться со значительными ошибками. Наиболее близким по технической сущности к предложенному изобретению является способ определения коэффициентов передаточных функций систем регулирования путем подачи на вход системы регулирования и ее модели время-степенных лробных сигналов и подстройки модели до момента компенсации выходного сигнала системы регулирования сигналом ; soдeли 4, Однако этот способ имеет следующие недостатки: невозможность определить передатошу функцию быстродействующих систем; боль шие ошибки в определении коэффициентов передаточных функций; значительный объе вычислений при определении коэффициенто передаточных функций; невозможность определения коэффициентов при действии промышленных йомех. Обобщая эта недостатки можно сказать, что известный способ определения коэффициентов передаточных функций имеет низкую точность. Цель изобретения - увеличение точнос ти способа. Поставленная цель достигается тем, что время-степенные пробные сигналы формируют из последовательности одиночных сигналов. На чертеже изображена функциональная схема устройства, реализующего предложен ный способ. Схема содержит исследуемую систему модель 2, генератор время-степенных пробных сигналов 3, блок сравнения 4, измеритель разности 5. В качестве модели 2 могут быть использованы элементы аналоговой вычислительной машины. В ка честве генератора время-степенных пробных сигналов 3 можно использовать последовательно соединенные интеграторы. Со входа первого интегратора нгР вход системы 1 и модели 2 подается ступенчатое воздействие (канал 1), с выхода первого интегратора на вход системы 1 и модели 2 подается линейног-растущий сигнал (канал 2), с выхода второго интегратора на вход системы 1 и модели 2 подается квадратно-растущий сигнал (канал 3). Последовател ное включение интеграторов приводит к тому, чTOfc степень выходного сигнала каждого последующего интегратора увеличивается на единицу. Поэтому млходной сигнал k-ro интегратора будет равен Генератор время-степенных рядов 3 сконструирован таким образом, что на вход системы 1 и модели 2 мо-, жат подаваться любой из полученных в этом генераторе сигналов, Е гходные сигналы исследуемой системы 1 и модели 2 подают на блок сравнения 4. В качест ве блока сравнения 4 может быть использован операционный усилитель, работающий в режиме масштабного преобразователя. Выходной сигнал блока сравнения равен разнос-га выходньос сигналов Х, и модели Ху,т.е.А (;. Сигнал разности д подают на блок измерителя разности 5. Измерителем разности 5 может служить операционый усилитель, работающий в режиме интегрирования. Для определения величины Л необходимо интегратор блока ,5 включить после прекращения в системе свободных колебаний; а затем результат интегрирования разделить на время интегрирования. Предположим, что передаточная функция исследуемой системы имеет вид: , «KcP «(K-,)oP -- °icP «oc Для определения неизвестных коэффициентов передаточной функции исследуемой системы 1 поступают следующим образом. Подают на вход системы 1 и модели 2 ступенчатый сигнал. После прекращений свободных колебаний в исследуемой системе изменяют коэффициент при свободном слене модели 2 до тех пор, пока интегратор блока 5 не остановится. Это значит, что коэффициент при свободном члене системыо равен коэффициенту при свободном члене модели а . Затем, подают на вход сиса-емы и модели линейно растущий сигнал Xg . Коэффициенты О, при первой производной определяют по формуле где - разность выходного сигнала системы и модели при подаче X. вх ° -1 Ь ; оС - коэффициент при линейно растущем сигнале. Если этот коэффициент будет велик, то выходная величина системы раньше достигнет своего предельного значения, чем затухающие в системе свободные колебания. Тогда эксперимент надо повторить, предварительно уменьшив величину ct. Когда в системе затухнут свободные колебания все производные выше первой обратятся в нуль и расчетная формула для вычисления а примет простой вид. После определения значения коэффициента приступают к определению коэффициента q -. На вход системы и модели подают .2-t. После прекращения свободных колебаний формула для вычисления О имеет вид: z°.gc (.о где разность выходного сигнала системы и модели при подаче на их вход воздействий gx Подавая на вход системы все более сложный сигнал из последовательности время-степенного ряда можно определить все неизвестные коэффициенты исследуемой системы где Aj - разность выходного сигнала системы и модели при подаче на их вход воздействий Xg (и коэффициент при соответствующ сигнале из время-степенного Описание предложенного способа, пока зывает, что его реализация не требует сложной аппаратуры, а коэффициенты передаточной функции определяются приблизительно с одинаковой ошибкой. Поэтому способ может найти широкое применение при наладке промышленных систем регулирования. С помощью устройств, реализующих этот способ, удается быстро определить передаточные функции промышленных систем, а затем за короткий сро наладки добиться в этих системах оптималь ного режима функционирования. Формулаизобретения Способ определения коэффициентов передаточных функций систем згправления путем подачи на вход системы регулирования и ее модели время-степенных пробных сигналов и подстройки модели до момента компенсации выходного сигнала системы регулирования сигналом модели, отличающийся тем, что, с целью увеличения точности способа, в йем времястепенные пробные сигналы формируют из последовательности одиночных сигналов. Источники информации, принятые во внимание при экспертизе 1.Дегтяренко П. М„ Коваленко В. П. Определение характеристик звеньев систем автоматического регулирования, Энергия, М., 1973, с. 76-81. 2.Ордьгацев В. М. Автоматизация математического описания объектов управления, Маш инострение, М., 1969, с. 91105. 3.Власов-Власюк О. Б. Экспериментальные методы в автоматике, Машиностроение, М., 1969, с. 178-184. 4.Авторское свидетельство СССР № 2О8792, кл, Q 05 В 23/02, 1966, (прототип),
А 
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения коэфициентов передаточных функций | 1975 |
|
SU596915A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ И ЗАДАТЧИК ПРОБНЫХ СИГНАЛОВ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2131139C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 1997 |
|
RU2125287C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПЕРЕДАТОЧНЫХ ФУНКЦИЙ ЛИНЕЙНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 1999 |
|
RU2166789C2 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕЙНОГО ОБЪЕКТА | 1995 |
|
RU2097818C1 |
| СПОСОБ САМОНАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ ОБЪЕКТОМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2304298C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ОПТИМАЛЬНОЙ ИМПУЛЬСНОЙ НАСТРОЙКИ СИСТЕМЫ УПРАВЛЕНИЯ | 2006 |
|
RU2384872C2 |
| Способ поиска неисправного блока в непрерывной динамической системе | 2021 |
|
RU2762532C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЕРЕДАТОЧНОЙ ФУНКЦИИ ДИНАМИЧЕСКОГО ЗВЕНА | 1968 |
|
SU208792A1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ГАРМОНИЧЕСКИМ МОМЕНТОМ НАГРУЗКИ В ШИРОКОМ ДИАПАЗОНЕ СКОРОСТЕЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2020 |
|
RU2761780C1 |
Ч Ч 1 Ч
II
.
X
It
:р
