Настоящее изобретение относится к устройству для измерения прогиба шоссе, соединенному с транспортным средством, включающим раму, передние колеса и заднюю несущую ось, представляющую собой две пары задних колес.
Устройство предназначено для измерения прогиба шоссе под действием прохождения несущей задней оси и включает:
- каретку, опирающуюся на шоссе посредством двух передних опор и одной задней опоры, определяющих плоскость отсчета, при этом передние опоры расположены с двух сторон продольной оси каретки, а задняя опора обязательно располагается на данной оси,
- средства определения прогиба шоссе, включающие два пальпирующих стержня, закрепленных вращающимся образом посредством их передних концов на промежуточной части каретки, вокруг оси, проходящей перпендикулярно к продольной оси каретки, и опирающихся на шоссе посредством их задних концов, снабженных ползунами, соответственно расположенных на траекториях движения вперед межосевых расстояний каждой пары колес и способных проходить между этими колесами каждой пары вне равновесия этих межосевых расстояний, при этом средства определения, кроме того, включают средства расчета прогиба шоссе в зависимости от положения пальпирующих стержней и соединены со средствами хранения расчетных значений,
- средства перемещения каретки, связанные со средствами управления, с целью освобождения каретки после каждого цикла измерений и с целью передвижения каретки вперед со скоростью по отношению к земле, превышающей скорость транспортного средства, после каждого цикла измерений.
Подобные устройства, известные из французского патента N 1552070, представляют недостаток, который заключается в том, что они являются относительно медленными, так как их скорость продвижения вперед в момент измерения не превышает 3,5 км/час. Более того, обычно предполагается, что первое измерение, выполненное как опорная величина отсчета, или "нулевое значение прогиба", осуществляется на участке, еще не нарушенном несущей осью. Однако, это случается редко, так как все три точки опоры каретки находятся впереди задней несущей оси, причем задняя опора находится даже на сравнительно малом расстоянии от этой несущей оси. Учитывая это, выполненные замеры соответствуют только приблизительным значениям (заочно) прогиба.
Впрочем, известные устройства представляют, правда средства для установки каретки в заданное положение относительно нагруженного транспортного средства, которые позволяют заранее определить положение каретки в зависимости от радиуса поворота грузового автомобиля с целью выполнения замеров в момент поворота. Однако если из-за ошибки, даже незначительной, со стороны водителя или отклонения грузовика, вызванного внешней причиной, радиус поворота изменяется в ходе замера, пальпирующие стержни рискуют быть поврежденными, т.е. раздавленными, колесами задней несущей оси. С применением существующих устройств также аварии являются относительно частыми и приносят значительные убытки. Чтобы их избежать, приходится ограничивать скорость грузовика на поворотах, что еще больше замедляет скорость замеров. Более того, пришлось изготавливать устройства, названные "с длиной рамой", имеющие габарит основной рамы, равный 6,8 м, для измерений на шоссе типа равнинной национальной дороги или автодороги, и более маневренные устройства, названные "с короткой рамой" с габаритом основной рамы, равным 4,8 м, для измерений на шоссе типа окружной дороги или горной национальной дороги. Измерения, выполненные устройствами с короткой рамой, разумеется, являются менее точными, чем измерения, выполненные устройствами с длинной рамой. В любом случае эта необходимость иметь два типа устройства, конечно, увеличивает себестоимость.
Изобретение имеет целью установить эти недостатки, предлагая устройство, позволяющее выполнить быстрое определение нулевого прогиба, начиная с первого замера, обеспечить точность измерения по крайней мере эквивалентную точности устройства с длинной рамой, на шоссе любого типа, более высокую скорость перемещения при измерении, например, порядка 10 км/час в общую безопасность перед риском раздавливания пальпирующих стержней задними колесами, что позволяет использование одного и того же устройства на шоссе любого типа.
С этой целью две передних опоры располагаются впереди каретки и определяют прямую, перпендикулярную к продольной оси каретки, тогда как задняя опора помещается сзади задней оси с начала каждого цикла измерения. Кроме того, устройство включает средства управления кареткой, предназначенные направлять каретку в зависимости от радиуса поворота грузовика, исключая раздавливание пальпирующих стержней задними колесами.
Даже если первое выполненное измерение находится еще не вне зоны влияния задней оси, но уже на краю углубления прогиба, расположение задней опоры вне задней оси с начала каждого цикла измерения позволяет сделать так, что извлекается выгода от качания каретки при продвижении грузовика в направлении, противоположном вращению пальпирующих стержней. Таким образом, получается коррекция первоначального значения прогиба, взятого в качестве опорной величины. Точность измерения от этого улучшается, при этом устройство с короткой основной рамой обеспечивает точность по крайней мере эквивалентную точности устройств с классическими длинными рамами.
Средства управления позволяют провести измерения на более высокой скорости, исключая любое разрушение материала. Если в процессе измерения радиус поворота грузовика выходит за рамки допустимого значения, средства управления направляют каретку таким образом, что пальпирующие стержни не могут быть раздавленными задними колесами. Если каретки слишком смещены вбок, измерения могут быть направленными, и циклы измерения следует возобновить, но материал не подвергся никакому разрушению. Одно и тоже устройство может быть использовано по всей дорожной сети без нарушения точности и скорости измерений.
Преимущество средства управления кареткой заключается в том, что они снабжены роликами, выступающими наружу от верхней поверхности каретки и расположенными парами с одной и с другой стороны от продольной оси этой каретки и находящимися в плане, перпендикулярном этой оси. Эти ролики включают по крайней мере пару передних роликов и пару задних роликов. Кроме того, средства управления имеют удлиненные элементы управления роликов по крайней мере одна часть которых способна поворачиваться в зависимости от поворота передних колес транспортного средства.
Предпочтительно, удлиненные элементы управления включают две направляющие задние неподвижные детали и две задние подвижные детали, проходящие к задней части каретки, с наружной части задних роликов, т.е. вне этих роликов относительно положения продольной оси каретки. Эти задние подвижные направляющие детали проходят почти продольно и могут вращаться в зависимости от поворота передних колес, тогда как задние неподвижные направляющие детали представляют собой задние части, фактически параллельные продольной оси каретки, и расходящиеся передние части, определяющие максимальное угловое смещение задних роликов. Удлиненные элементы управления, кроме того, имеют передние направляющие детали, которые включают почти продольные поверхности управления, расположенные между передними роликами и способные вращаться в зависимости от радиуса поворота грузовика.
В целях избежания повреждения пальпирующих стержней необходимо, чтобы максимальное расстояние между направляющими деталями и роликами было бы равно, и не больше, ширине колес каждой пары задних колес. Действительно, это позволяет направлять каретку таким образом, что задний конец пальпирующих стержней всегда находится между парами задних колес, давая возможность каретке слегка отклоняться вбок.
Предусмотрен также упорный узел, включающий передние упорные средства для определения крайней позиции продвижения каретки вперед относительно грузовика и задние упорные средства для определения крайней позиции отвода каретки относительно грузовика в конце цикла измерения.
Известные устройства представляют проблемы возникновения вибрации каретки, связанные с трением опор по шоссе. Эта вибрация может привести к ошибкам на уровне измерения, следовательно, необходимо свести ее к минимуму и даже совсем исключить. С этой целью каретки изготавливается из сложного материала и имеет частоту собственных колебаний, равную примерно 21 герц. Эта частота в 21 герц значительно превышает частоты вибрации на шоссе, которые обычно составляют порядка 5 - 10 герц. Это позволяет избежать любое возникновение резонанса устройства и ускорить ослабление вибраций, вызванных трением опор по шоссе. Кроме того, сложный материал является одновременно жестким и легким, что облегчает перемещение каретки средствами перемещения.
Впрочем, по-прежнему, в целях увеличения скорости устройства, упорный узел удобно соединен с амортизаторами удара каретки. Передние упорные средства выгодно включают восстановительную систему энергии, предназначенную для того, что, когда каретка освобождена перед замером, она восстанавливает энергию, накопленную при ударе, передних упорных средств. Такая система восстановления энергии, таким образом, облегчает торможение и остановку каретки на шоссе, как только она освободиться перед каждым циклом замеров посредством средств перемещения.
Средства управления средствами перемещения каретки включают также средства автоматического определения последовательности перемещения и освобождения каретки на шоссе, соединенные с датчиками положения, которые позволяют управлять различными фазами.
Устройство включает, преимущественно по крайней мере один уклономер, предназначенный для определения радиуса изгиба шоссе.
Этот уклономер имеет по крайней мере один подвижный щуп, снабженный ползуном, закрепленным на заднем конце одного из пальпирующих стержней, способным вращаться вокруг горизонтальной оси. Таким образом, этот подвижный щуп может следовать за всеми уклонами, вызванными прогибом, образовавшимся в результате прохождения задней оси, при этом его ползун находится в контакте с шоссе. Кроме того, уклономер включает средства измерения углового смещения подвижного щупа вокруг его оси вращения и средства расчета радиуса изгиба шоссе на основании этого углового смещения. Кроме того, он связан со средствами хранения расчетных значений, которые хранят данные изгиба или радиуса изгиба на вершине прогиба. Следовательно, предпочтительно хранится только одно значение на цикл измерений. Действительно, измеряется угловое смещение подвижного щупа в нескольких точках впереди и сзади относительно задней оси. Среднее значение измерений, выполненных в этих нескольких точках, дает по способу дифференцирования кривую линию на вершине прогиба. Радиус кривой представляет собой обратную величину этой кривизны.
Устройство преимущественно соединено с информационной системой, предназначенной для исключения расчетных аберрационных значений. Эти значения, которые считаются аберрационными, будут определяться на основе заранее определенных тестов, которые учитывают полученный в данной области опыт. Таким образом, всякий источник ошибки, вызванной, например, скольжением каретки по шоссе, может быть исключен. Эта информационная система может быть частью математического обеспечения, которое гарантирует в равной степени накопление и хранение выполненных замеров, расчет прогиба и при случае расчет радиуса кривизны.
Другие характеристики и преимущества устройства станут очевидными при знакомстве со следующим детальным описанием способов исполнения изобретения, приведенных в качестве не ограничивающих его примеров. Описание относится к прилагаемым чертежам, на которых:
фиг. 1 представляет вид снизу устройства, соединенного с грузовиком;
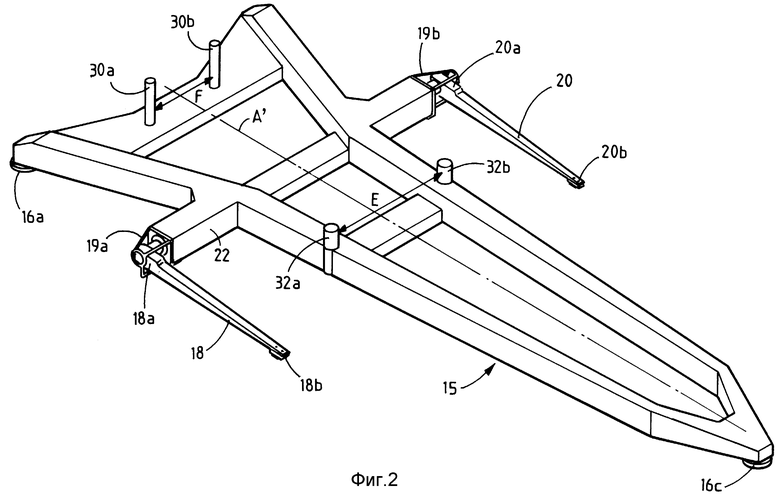
фиг. 2 показывает в перспективе одну каретку;
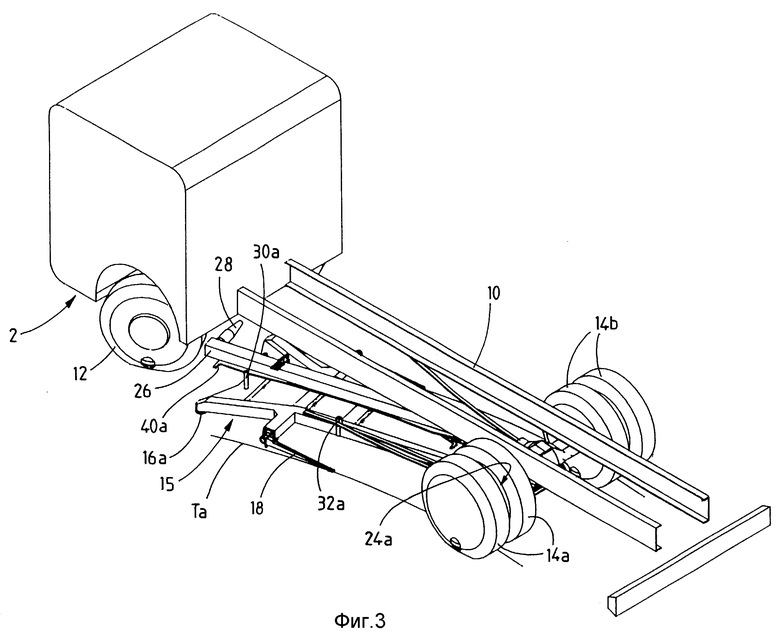
фиг. 3 изображает в перспективе устройство, соединенное с грузовиком в процессе поворота;
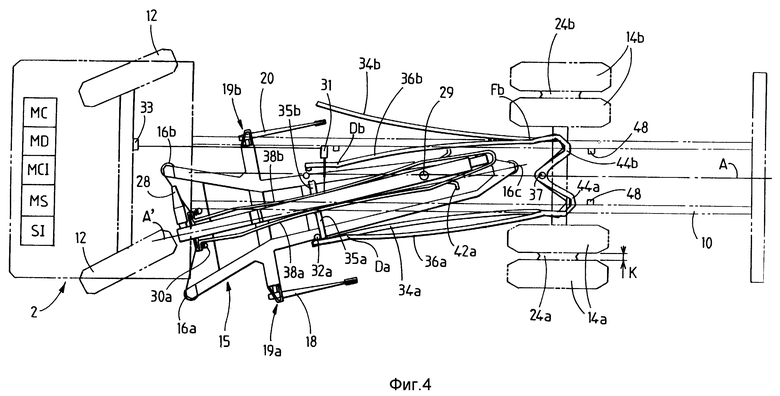
фиг. 4 представляет вид снизу устройства, соединенного с грузовиком в момент поворота, в положении переднего упора каретки;
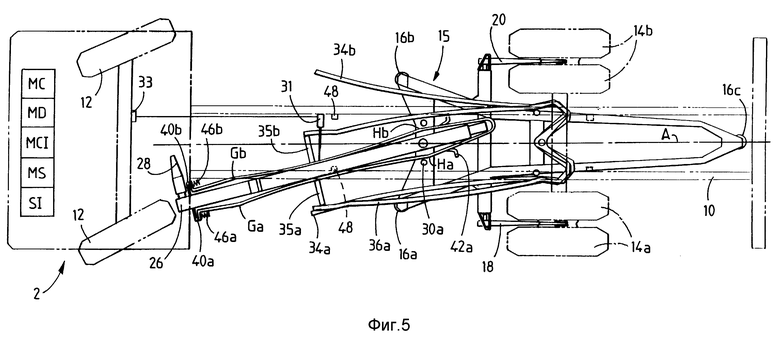
фиг. 5 аналогична фиг. 4, при этом грузовик движется таким образом, что концы пальпирующих стержней находятся на одной линии с межосевым расстоянием пар задних колес;
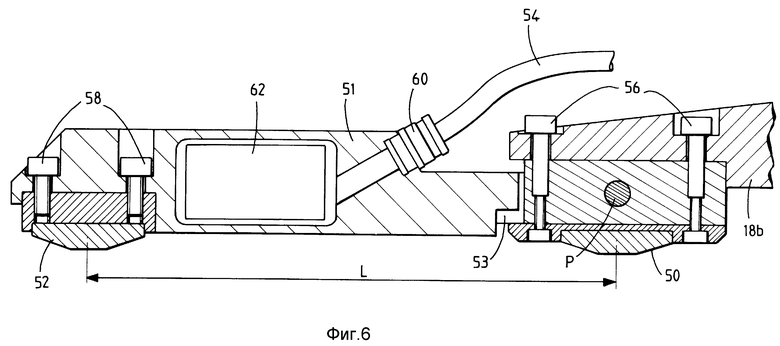
фиг. 6 представляет задний конец пальпирующего стержня, снабженного подвижным щупом;
фиг. 7а и 7б, представляют собой две блок-схемы обработки данных.
Фиг. 1, 3, 4 и 5 показывают устройство для измерения прогиба шоссе 1, соединенного с грузовиком 2. Этот грузовик включает раму 10, передние колесо 12 и заднюю несущую ось 14, представляющую две пары задних колес 14a и 14b. Устройство предназначено для измерения прогиба шоссе 1, т.е. понижение его уровня под воздействием прохождения задней несущей оси 14, которая, например, нагружена до 13 тонн.
Устройство для измерения прогиба включает каретку 15, представленную в перспективе на фиг. 2. Эта каретка 15 опирается на шоссе 1 посредством двух передних опор 16a и 16b и одной задней опоры 16c. Эти три опоры определяют опорный план отсчета. Передние опоры 16a и 16b расположены с одной и другой стороны от продольной оси A рамы 10, тогда как задняя опора 16c расположена четко на этой оси A. Эти опоры снабжены ползунами (не обозначены цифровой), которые должны осуществлять согласованность между значительным коэффициентом трения на шоссе, повышенным коэффициентом звуковой и вибрационной амортизации и удовлетворительной сопротивляемостью к истиранию. Осуществить такую согласованность позволяют ползуны, выполненные из пластмассы или на основе резины.
Устройство также снабжено средствами определения прогиба шоссе, которые включают два пальпирующих стрежня 18 и 20, закрепленные вращающимся образом за их передние концы 18a и 20a на промежуточной части каретки 15, вокруг оси 22, поперечной этой каретке и которые опираются на шоссе 1 посредством их задних концов 18b и 20b, снабженных ползунами. Эти задние концы расположены соответственно на траекториях движения вперед межосевых расстояний 24a и 24b каждой пары задних колес 14a и 14b. Для ясности чертежей на фиг. 3 изображена только траектория Ta межосевого расстояния 24a. Таким образом, задние концы пальпирующих стержней 18 и 20 способны проходить между каждой парой задних колес вне равновесия их межосевых расстояний 24a и 24b. Средства определения, кроме того, включают средства расчета прогиба шоссе в зависимости от положения пальпирующих стержней и связаны со средствами накопления расчетных значений. Для ясности чертежей эти средства очень схематично представлены обозначениями MC и MS на фиг. 1, 4 и 5.
Кроме того, устройство снабжено средствами 26 перемещения каретки 15, соединенными со средствами 28 управления. Средства 28 управления включают двигатель, очень схематично представленный на фигурах. Их роль сводится к тому, что они освобождают каретку 15 перед каждым циклом измерения и приводят эту каретку к передней части грузовика с более высокой скоростью относительно земли, чем скорость грузовика, после каждого цикла измерения. Согласно желаемому шагу измерений и, следовательно, согласно длине интервалов между каждым циклом измерения, средства управления могут в равной степени удерживать каретку 15 впереди грузовика между двумя циклами измерений. Это может быть осуществлено, например, путем оставления двигателя 28 слегка под напряжением.
Две передние опоры 16a и 16b расположены в передней части каретки 15 и определяют прямую D, перпендикулярную к продольной оси A этой каретки. Задняя опора 16c с начала каждого цикла измерения помещается сзади задней оси 14. Это положение задней опоры особенно хорошо видно на фиг. 1, которая изображает устройство и грузовик в начале цикла измерения по прямой линии. Фиг. 4 показывает положение каретки в момент поворота относительно грузовика перед циклом измерений или между двумя циклами измерения, на этой фигуре видно, что задняя опора 16c может помещаться во время этого периода впереди задней оси. На фиг. 5, которая иллюстрирует положение каретки относительно грузовика к концу цикла измерения, выполняемого в момент поворота, задняя опора 16c расположена на значительном расстоянии сзади задней оси 14.
Устройство имеет средства направления каретки, предназначенные для ее направления в зависимости от радиуса поворота грузовика 2, не позволяя раздавить пальпирующие стержни 18, 20 задними колесами 14a, 14b. Действие этих средств направления хорошо видно на фиг. 4 и 5.
Эти средства направления включают преимущественно ролики, выступающие наружу от верхней поверхности каретки 15 и, как это лучше видно на фиг. 2, расположенные парами с одной стороны и другой стороны продольной оси A' этой каретки и в перпендикулярной этой оси A' плоскости. Эти ролики включают по крайней мере пару передних роликов 30a и 30b и пару задних роликов 32a и 32b. Средства направления, кроме того, включают удлиненные элементы направления этих роликов, хорошо видные на фиг. 1, 4 и 5. По крайней мере часть этих удлиненных элементов направления способны вращаться в зависимости от поворота передних колес грузовика. Разумеется, когда грузовик движется по прямой, как это представлено на фиг. 1, различные средства направления больше не действуют на направление каретки, так что продольная ось A последней совпадает с продольной осью A рамы 10 и грузовика 2.
На фиг. 4 видно, в момент поворота продольная ось A' каретки 15 наклоняется относительно продольной оси A рамы 10, когда каретка упирается в переднее упорное средство. Это также имеет место вначале циклов измерения, и только в момент перемещения вправо задней оси, представленной на фиг. 5, оси A и A' будут снова друг над другом.
Удлиненные элементы направления включают преимущественно две неподвижные задние направляющие детали 34a и 34b и две подвижные задние направляющие детали 36а и 36b. Эти задние направляющие детали проходят снаружи задних роликов 32a и 32b к задней части каретки 15. Подвижные задние направляющие детали 36a и 36b проходят почти продольно и могут вращаться в зависимости от поворота передних колес 12. Неподвижные задние направляющие детали 34a и 34b представляют задние части, фактически параллельные продольной оси A' каретки 15, и расходящиеся передние части, которые определяют максимальное угловое смещение задних роликов 32a и 32b.
Кроме того, удлиненные элементы направления включают направляющие передние детали, которые имеют направляющие поверхности 38a и 38b, проходящие почти продольно между передними роликами 30a и 30b и способные вращаться в зависимости от радиуса поворота грузовика 2.
Средства управления при вращении направляющими передними деталями в зависимости от радиуса поворота грузовика схематично представлены цифровыми обозначениями 31 и 33 на фиг. 4 и 5. Число 33 обозначает средства определения радиуса поворота грузовика 2, механические или любые другие, например, состоящие из кодеров, которые передают значение радиуса поворота на исполнительный механизм 31 при вращении передних роликов. Этот исполнительный механизм 31, например, представлен домкратом. Для ясности чертежей он показан между одним из элементов рамы и направляющими роликами. Положение этого домкрата представлено только иллюстративно, но очевидно, что он вращает передние направляющие детали не только в направлении, указанном на фиг. 4 и 5, но также и в противоположном направлении.
Поворот также передается к задним подвижным направляющим деталям 36a и 36b. При этом детали 35a и 35b в форме перевернутой буквы U, показанные на виде снизу на фиг. 1, 4 и 5, связывают направляющие поверхности 38a, 38b с этими задними подвижными направляющими деталями 36a, 36b. Перевернутая форма U позволяет роликам свободно проходить (см. выдернутую часть детали 35b на фиг. 4), когда грузовик и каретка перемещаются относительно друг друга. Очевидно, что можно использовать только одну деталь в форме перевернутой U, расположенную между одной из подвижных задних направляющих деталей, например, 36a и одной из направляющих поверхностей, например 38a.
Также возможно использовать другие средства, например, немеханические, для передачи поворота к подвижным средствам направления.
Направляющие поверхности 38a, 38b передних направляющих деталей вращаются вокруг оси 29, расположенной в их задней части. Точно так же задние подвижные направляющие детали 36a, 36b вращаются вокруг оси 37, тоже расположенной в их задней части.
Задние подвижные направляющие детали 36a и 36b представляют преимущественно передние части, отклонение которых точно соответствует отклонению E задних роликов в конечной точке Da, Db стабилизации. Начиная с этой конечной точки стабилизации и до точки возобновления при нагрузке Fa и Fb, эти задние подвижные направляющие детали представляют задние части, отклонение которых увеличивается, затем уменьшается, возвращаясь резко к отклонению E задних роликов в точке возобновления при нагрузке. И, наоборот, направляющие поверхности 38a и 38b передних направляющих деталей представляют переднюю часть, отклонение которой почти равно отклонению F передних роликов 30a и 30b в конечной точке Ga, Gb стабилизации. Начиная с этой конечной точки стабилизации и до точки Ha, Hb возбуждения при нагрузке, эти направляющие поверхности представляют задние части, отклонение которых уменьшается, затем увеличивается, возвращаясь заметно к отклонению Г передних роликов 30a и 30b этой точке Ha, Hb возобновления при нагрузке.
Это особенное расположение позволяет адаптировать различные фазы, когда каретка 15 освобождена средствами перемещения. Действительно, каретка освобождается в положении, когда передние ролики 30a, 30b находятся напротив передних частей направляющих поверхностей 38a, 38b передних направляющих деталей, и/или задние ролики 32a, 32b находятся напротив передних частей задних направляющих деталей 34a, 34b, 36a, 36b. В первый момент, когда каретка освобождена различные направляющие детали контактируют с роликами, чтобы стабилизировать балку и расположить ее правильно. Балка расположена правильно, когда ролики находятся на уровне конечных точек стабилизации. Затем начинается цикл измерений, и ролики не должны соприкасаться с их направляющими деталями. Поэтому удобно так, чтобы отклонение передних направляющих поверхностей уменьшалось, а отклонение задних подвижных направляющих деталей увеличивалось. Измерения начинаются в положении, представленном на фиг. 1, т.е. когда ролики находятся четко сзади конечных точек стабилизации. После окончания измерения каретка вновь направляется в точки возобновления при нагрузке, где ролики снова касаются своих направляющих деталей. Эта последняя точка измерения, предпочтительно, соответствует положению роликов, находящихся слегка впереди этих точек возобновления при нагрузке, чтобы контакт между роликами и их направляющими деталями не помешал измерению. Затем каретка 15 переводится вперед, и может начинаться новый цикл измерений. Безопасность от риска раздавливания пальпирующих стержней задними колесами 14a и 14b гарантирована тем, что в каком-нибудь заданном положении каретки относительно направляющей детали расстояние между этими направляющими деталями и роликами в своем наибольшем значении равно отклонению. K каждой паре задних колес 14a и 14b таким образом, что эти концы пальпирующих стержней находятся всегда на траекториях межосевых расстояний этих колес. Такая мера предосторожности позволяет даже выполнить измерения при отставании от равновесия задней оси 14.
Фиг. 4 и 5 показывают грузовик в положении максимального поворота, при котором передняя часть задней подвижной направляющей детали 36a накладывается на переднюю часть задней неподвижной направляющей детали 34a.
Устройство включает преимущественно упорный узел, состоящий из передних упорных средств для определения положения максимального продвижения каретки относительно грузовика, изображенного на фиг. 4, и задних упорных средств для определения положения максимального отвода этой каретки относительно грузовика. Это положение максимального отвода находится немного сзади положения, показанного на фиг. 5, которое соответствует тому моменту, когда задние концы пальпирующих стержней находятся на одной линии межосевых расстояний пар задних колес.
Согласно предпочитаемому варианту исполнения, средства перемещения включают проходящий продольно и расположенный посередине тяговый направляющий рельс 26. В этом случае, как видно на фигурах, передние направляющие детали могут состоять из боковых элементов, выполненных монолитно с боковыми гранями этого тягового рельса. С этой целью указанный тяговый рельс 26 крепится подвижно, чтобы он мог вращаться в зависимости от радиуса поворота передних колес вокруг оси 29.
В соответствии с этим способом исполнения передние упорные средства включают по крайней мере один передний упорный элемент, жестко связанный с тяговым рельсом 26 и расположенный к его передней части. В приведенном примере эти передние упорные средства включают два передних упорных элементов 40a и 40b, проходящих с одной и другой стороны от среднего тягового рельса 26 по направлению к его передней части. Передние упорные средства включают также переднюю упорную поверхность, лицевая сторона которой состоит по крайней мере из одного из передних роликов 30a и 30b. Таким образом, по крайней мере, один из этих роликов способен соприкасаться с передним упорным элементом с целью определения положения максимального продвижения вперед каретки относительно грузовика. Очевидно, что передние ролики могут служить одновременно для направления каретки и для определения ее переднего упорного положения.
Они с таким же успехом могут быть использованы для определения задней упорной позиции. Действительно, задние упорные средства могут включать по крайней мере один задний упорный элемент 42a и 42b, неподвижный относительно передних направляющих деталей 38a и 38b, расположенный ближе к их задней части и предназначенный для удерживания по крайней мере одного из передних роликов 30a, 30b с целью определения максимального отвода каретки. В приведенном примере указаны два задних упорных элемента 42a и 42b.
В качестве дополнения или альтернативы задние ролики могут быть также использованы для определения положения максимального отвода каретки. С этой целью задние упорные средства могут включать по крайней мере одно приспособление 44a, 44b заднего упора, расположенное четко на уровне задней оси 14 и предназначенное для удерживания по крайней мере одного из задних роликов 32a и 32b.
С целью облегчения торможения каретки при остановке или в передней упорной позиции, или в задней упорной позиции упорный узел может быть связан с амортизаторами удара каретки. В приведенном примере амортизаторы 46a и 46b соединены только со средством переднего упора, но возможно также предусмотреть аналогичные амортизаторы, соединенные со средством заднего упора.
Передние упорные средства 40a и 40b могут включать систему восстановления энергии, которая, в приведенном примере, прямо связана с амортизаторами 46a и 46b. Эта система восстановления энергии, представленная, например, рессорой, предназначена для восстановления энергии, накопленной при ударе передних упорных средств 40a, 40b, 30a, 30b, когда каретка 15 освобождается перед циклом измерения. Таким образом, эта система восстановления энергии позволяет ускорить установление и стабилизацию каретки, когда она освобождается относительно грузовика.
Средства 28 управления средствами 26 перемещения каретки 15 включают преимущественно средства автоматического определения последовательностей перемещения и освобождения каретки 15 на шоссе 1, соединенные с датчиками 48 положения. Эти датчики 48 положения могут располагаться вдоль рамы 10 грузовика и передавать данные о положении каретки к средствам управления ее перемещением, которые в соответствии с этим приводятся в действие. Фактически, одна и та же информационная система может одновременно управлять получением измерения, а также последовательностью тяги, установления и повторного использования каретки.
В соответствии с предпочитаемым вариантом исполнения средства расчета прогиба шоссе включают ротационные кодеры 19a и 19b, предназначенные для измерения степени вращения пальпирующих стержней 18 и 20, и средства МС определения перемещения ползунов этих пальпирующих стержней в зависимости от степени вращения. Эти ротационные камеры 19a и 19b представлены очень схематично на фигурах и позволяют операторам избежать калибрования данных. Действительно, они замеряют вращение пальпирующих стержней между двумя данными моментами и не требуют никакого приведения к нулю. Это позволяет еще больше ускорить измерения.
Устройство может включать по крайней мере один уклономер, предназначенный для определения радиуса изгиба шоссе. Действительно, можно определить состояние шоссе не только по глубине прогиба, которая определяется посредством средств определения прогиба, о которых уже упоминалось, но также по глубине прогиба, которая определяется посредством средств определения прогиба, о которых уже упоминалось, но также по кривизне на вершине этого прогиба. Впрочем, также возможно принять во внимание температуру шоссе для обработки данных, в таком случае температурные датчики могут располагаться под грузовиком.
Как показано на фиг. 6, которая представляет детально конечную часть 18a пальпирующего стержня, уклономер имеет по крайней мере один подвижный щуп 51, снабженный ползуном 52. Этот щуп 51 вращается вокруг горизонтальной оси P, на заднем конце 18a пальпирующего стержня 18. Эта конечная часть 18b уже имеет ползун 50, который используется для измерения прогиба, и ползун 52 подвижного щупа 51, располагается на определенном расстоянии L от ползуна 50 пальпирующего стержня. Очевидно, что оба ползуна, предпочтительно, лежат на одной прямой в продольном направлении. Кроме того, уклономер включает измерительные средства MD, схематично представленные на фиг. 1, 4 и 5, для измерения углового смещения подвижного ползуна вокруг своей оси P вращения, и средства MC1 расчета радиуса кривизны шоссе 1 на основании этого углового смещения. Кроме того, уклономер соединен со средствами хранения расчетных значений, которые хранят значение радиуса изгиба на вершине прогиба. Действительно, измеряется вертикальное положение ползунов 50 в вертикальное положение ползуна 52. Тогда с учетом расстояния L, разделяющего эти два ползуна, можно рассчитывать путем дифференцирования кривизну прогиба. Расчет производится на основании нескольких точек измерения, расположенных вокруг прямого угла задней оси, с учетом которых определяется кривизна на вершине. Радиус кривизны рассчитывается посредством обратной величины этой кривизны. Очевидно, что средства MC1 расчета радиуса кривизны и средства MS хранения расчетных значений могут являться частью уже названной информационной системы.
Фиг. 6 представляет начальный рекорд кабеля 54, который связывает подвижный ползун 52 с остальным устройством. Чтобы не усложнять чертежи, другие кабели, которые связывают между собой различные составные элементы устройства, не показаны. Разумеется, есть кабели, которые связывают конечную часть пальпирующих стержней с ротационным кодером, кабели, которые связывают эти ротационные кодеры со средствами расчета прогиба, и при случае, кабели, которые связывают средства автоматического определения последовательностей перемещения и освобождения каретки с датчиками 48 положения и средствами 28 управления средствами перемещения каретки. Конкретно с целью облегчения перемещения каретки перемещение различных кабелей гарантируется тяговой системой каретки, что практически позволяет устранить усилия, проходящие по этим кабелям и применяемые к каретке. Следовательно, это позволяет избежать случайных искажений замеров тяговыми кабелями и кабелями передачи данных.
Как видно, по-прежнему, на фиг.6 подвижный щуп 51 может быть съемным. Таким образом, можно по желанию измерить или только глубину выемки прогиба, или также радиус кривизны этой выемки. Само собой разумеется, можно задействовать средства определения прогиба и уклономер одновременно или отдельно друг от друга.
Действительно, как это видно на фиг.6, подвижный ползун 52 может крепиться на заднюю часть подвижного щупа 51, который, в свою очередь, крепится посредством вилки 53 и винта оси P на конечную часть 18b пальпирующего стержня 18. Как уже ранее указывалось, подвижный ползун, или точнее подвижный щуп 51, может быть съемным и сниматься просто отвинчиванием винта оси P, тогда как кабель 54 может присоединяться или убираться посредством контактного соединения 60. Число 62 обозначает элемент измерения наклона подвижного щупа 51.
Ползуны 52 и 50 представляют собой детали, которые подвергаются износу, поэтому, желательно, чтобы эти детали могли заменяться. С этой целью ползун 52 крепится к конечной части подвижного щупа 51 с помощью винта 58 в то время, как ползун 50 крепится к конечной части 18b пальпирующего стержня 18 с помощью винта 56. Эти способы фиксации ползунов 50 и 52 хорошо видны на фигуре, которая представляет конечную часть 18b пальпирующего стержня и подвижный щуп 51 в разрезе.
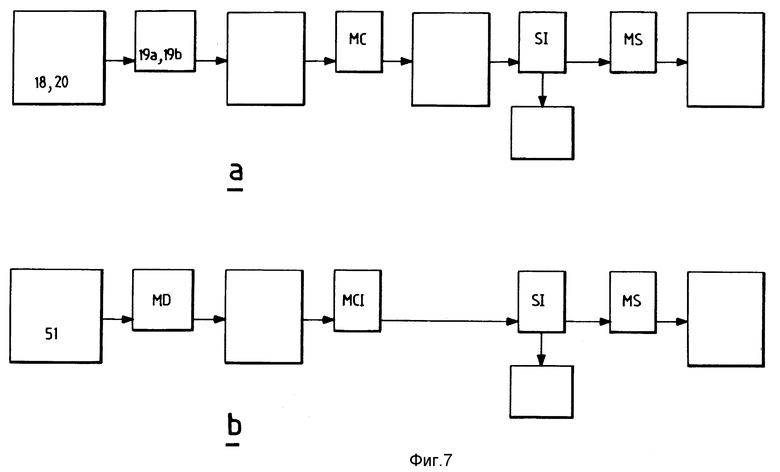
Фиг. 7 включает первую часть 7a, которая изображает блок-схему измерения прогиба, и вторую часть 7b, которая представляет блок-схему измерения радиусов кривизны выемки прогиба. Измерения выполняются при постоянной скорости грузовика 2. В первый момент средства перемещения каретки освобождают ее на шоссе. Затем грузовик продвигается вперед относительно этой каретки, чтобы дать ей время стабилизироваться и амортизировать вибрацию. Измерения начинаются в начальной точке измерения и кончаются в конечной точке измерения. После этой конечной точки измерения каретка отводится к заднему упору, затем передвигается к передней части грузовика до положения переднего упора с помощью своих средств перемещения. Как уже было видно, средства перемещения могут управляться посредством информационной системы, которая принимает данные датчиков 48 положения. Например, измерение выполняется, примерно через каждые 2 см в течение одного измерительного цикла. Шаг измерительных циклов может быть равен 10 м, т.е. циклы повторяются через каждые 10 м для скорости движения транспортного средства 10 км/час. Возможно также определить измерительный шаг в 5 м и для постоянной скорости движения 3,5 км/час.
Во время цикла измерения определение прогиба осуществляется следующим образом, представленным на блок-схеме фиг. 7a. Ротационные кодеры 19a и 19b определяют положение пальпирующих стержней 18 и 20 примерно через каждые 2 см. Таким образом, эти ротационные кодеры 19a и 19b определяют степень вращения пальпирующих стержней через каждые 2 м. Расчетные средства MC определяют затем перемещение ползунов 50 в зависимости от этой степени вращения. Это дает прогиб шоссе через каждые 2 см. Для каждой точки измерения может использоваться информационная система S1 в качестве фильтра для устранения значений, признанных аберрационными на основе заранее определенных тестов. Значения, которые будут признаны действительными, будут затем введены в память с помощью средств хранения MS, и совокупность этих значений покажет глубину выемки прогиба через каждые 2 см.
Со ссылкой на блок-схему фиг.7a теперь будет описано определение радиуса кривизны на вершине выемки прогиба. Средства MD измерения определяют угловое положение подвижного щупа 51 с ползуном 52 в нескольких точках, расположенных вокруг прямого угла задней оси. Эти средства MD измерения, которые, например, могут соединяться с упомянутыми ротационными кодерами, определяют затем угловое смещение подвижного щупа 51. Затем подключаются средства MC1 расчета, чтобы рассчитать кривизну в этих нескольких точках, на основе полученных результатов подсчитать среднее значение с целью выведения кривизны на вершине и вывести величину, обратную этой кривизне, для получения радиуса кривизны на вершине. Как уже отмечалось, эти средства расчета определяют кривизну на основе наклона подвижного щупа 51 и расстояния L, разделяющего ползун 50 конечной части 18 пальпирующего стержня от ползуна 52 задней оконечности подвижного щупа 51. Результаты данных кривизны в нескольких точках измерения могут быть пропущены через фильтр, представленный информационной системой S1, которая устранит значения, признанные аберрационными, из заранее определенных тестов. Признанные допустимые значения затем будут учтены для расчета кривизны на вершине выемки прогиба. Средства MS хранения запоминают одно значение радиуса кривизны для каждого цикла измерения.
Очевидно, что различные средства MC и MC1 расчета, информационная система S1 и средства MC хранения могут являться частью общего информационного математического обеспечения. Впрочем, как уже отмечалось, это информационное математическое обеспечение может также управлять последовательностью снятия/установления каретки на шоссе в зависимости от данных, переданных датчиками 48 положения. Желательно, чтобы грузовик был снабжен различными информационными средствами.
Разумеется, в только что описанное устройство могут быть внесены различные модификации, не выходящие за рамки изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕМЕНТ МОСТА, ОБРАЗУЮЩИЙ ГОРИЗОНТАЛЬНУЮ ПОПЕРЕЧНУЮ БАЛКУ | 1993 |
|
RU2074280C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ КИНЕМАТИКИ КРЫШЕК | 1996 |
|
RU2153440C2 |
| Двигатель внутреннего сгорания с наддувом | 1981 |
|
SU1192634A3 |
| КОНДЕНСАЦИОННЫЙ ТЕПЛООБМЕННИК С ПЛАСТМАССОВЫМ КОРПУСОМ | 2003 |
|
RU2317490C2 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ | 2001 |
|
RU2211344C1 |
| ИОННЫЙ ИСТОЧНИК С ЗАКРЫТЫМ ДРЕЙФОМ ЭЛЕКТРОНОВ | 1996 |
|
RU2172536C2 |
| РАСШИРЯЮЩИЙСЯ ФОРМООБРАЗУЮЩИЙ БАРАБАН И СПОСОБ ДЛЯ СБОРКИ ШИН ДЛЯ КОЛЕС ТРАСНПОРТНЫХ СРЕДСТВ | 2016 |
|
RU2709340C2 |
| Универсальный деревообрабатывающий станок | 1990 |
|
SU1797567A3 |
| СОРТИРОВОЧНАЯ МАШИНА | 2023 |
|
RU2829298C1 |
| Устройство для перемещения единиц подвижного железнодорожного состава с заклиненной колесной парой | 2015 |
|
RU2607345C2 |
Изобретение относится к устройству для измерения прогиба шоссе, соединенному с транспортным средством, включающим раму, передние колеса и заднюю несущую ось, представляющую пары задних колес. Кроме того, устройство включает каретку, опирающуюся на шоссе посредством трех опор, средства определения прогиба включают два пальпирующих вращающихся стержня, закрепленных на каретке, задние оконечности которых, снабженные роликами, расположены на траекториях продвижения вперед межосевых расстояний каждой пары задних колес. Средства перемещения каретки соединены со средствами управления для освобождения каретки перед каждым циклом измерения и передвижения ее к передней части транспортного средства после каждого цикла измерения. Задняя опора каретки расположена сзади задней оси с начала каждого цикла измерения. Устройство включает средства управления кареткой, предназначенные для направления каретки в зависимости от радиуса поворота транспортного средства. Изобретение обеспечивает быстрое определение прогиба, повышает точность измерения. 17 з.п. ф-лы, 7 ил.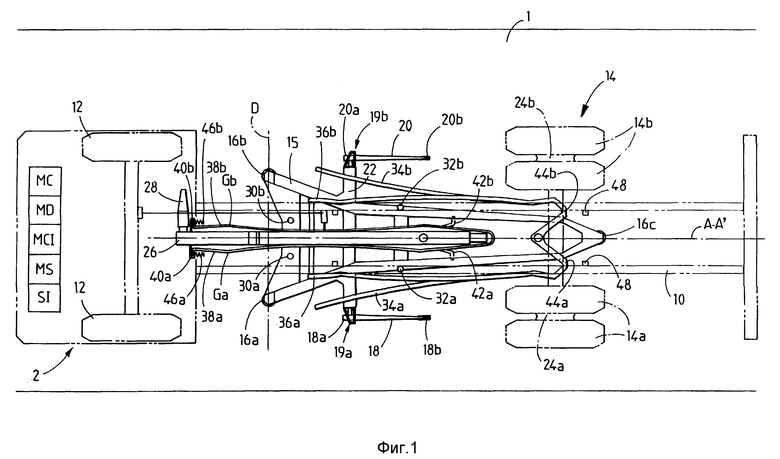
| Датчик контроля износа детали | 1987 |
|
SU1552070A1 |
| SU 1559969 A, 07.06.85 | |||
| Установка для измерения прогиба дорожной одежды | 1990 |
|
SU1756450A1 |
| СПОСОБ ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА ПЕРЕДАЧИ ОБЪЕКТА НА ЧАСТОТЕ ЭЛЕКТРОМАГНИТНОГО ИЗЛУЧЕНИЯ | 1994 |
|
RU2099726C1 |
| US 48214726 A, 02.10.87. | |||

