ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
[1] Предложенное техническое решение относится к сортировочным машинам, предназначенным для перемещения и разгрузки товаров в заданные места и которые включают в себя сбрасывающие (наклоняющие) тележки.
УРОВЕНЬ ТЕХНИКИ
[2] Из уровня техники известная сортировочная машина, раскрытая в патентном документе US 9067743 B1, опубл. 30.06.2015, принятый в качестве наиболее близкого аналога и включающий в себя став, цепь тележек, приводной модуль, наклоняющий модуль и возвращающий модуль. Цепь тележек выполнена с возможностью перемещения по ставу, включает в себя множество тележек, каждая из которых содержит кузов, выполненный с возможностью нахождения в положении для сброса товара, в котором он наклонён в заданную сторону, и в положении для транспортировки товара. Приводной модуль соединён со ставом и выполнен с возможностью перемещения цепи тележек. Наклоняющий модуль соединён со ставом, выполнен с возможностью взаимодействия с соответствующей тележкой для перевода её кузова в положение для сброса товара и содержащий по меньшей мере один переключатель, выполненный втягивающим, выполненный с возможностью открытия против хода движения цепи тележек и включающий в себя привод. Возвращающий модуль соединён со ставом и выполнен с возможностью взаимодействия с соответствующей тележкой для перевода её кузова в положение для транспортировки товара.
[3] Наклон кузова тележки происходит следующим образом: при помощи привода переключатель совершает неполный поворот, тем самым оказываясь на пути кулачкового толкателя. Двигаясь вместе с тележкой, кулачковый толкатель попадает в жёлоб переключателя и отводится в сторону, увлекая за собой кузов. Затем кулачковый толкатель перемещается по нисходящей рампе, вызывая тем самым наклон кузова. Последующее движения кулачкового толкателя по восходящей рампе возвращает поддон в исходное положение.
[4] Описанный механизм имеет следующие недостатки:
[5] 1. Приводной модуль включает 2 привода, что является избыточным и вызывает проблемы с синхронизацией их работы. Рассинхронизация приводов приводит к появлению неравномерной передачи усилия от приводного блока к цепи кареток, далее к неравномерной скорости движения кареток, что в свою очередь вызывает ошибки во времени срабатывания опрокидывающих модулей.
[6] 2. Конструкция тележки предусматривает возможность наклона кузова с подворотом, что усложняет конструкцию, не оказывая должного положительного эффекта для большинства типоразмеров товаров.
[7] 3. Переключатель наклоняющего модуля открывается против движения тележки, что при неправильном времени срабатывания может привести как к поломке кулачкового толкателя, так и самого наклоняющего модуля. Данная поломка с большой долей вероятности делает дальнейшую эксплуатацию сортировочной машины невозможной до проведения капитальных ремонтных работ.
[8] 4. Отсутствие системы контроля не позволяет диагностировать поломки дистанционно. Кроме того, при несвоевременном обнаружении отклонений от нормальной работы контролируемого устройства возрастает риск дальнейших разрушений при эксплуатации.
[9] 5. Конвейерная цепь перемещается по кольцевой траектории в горизонтальной плоскости, что приводит к значительному увеличению занимаемого пространства сортировочной системой.
[10] Техническая проблема заключает в создании технического решения, в которой устранены недостатки наиболее близкого аналога.
РАСКРЫТИЕ СУЩНОСТИ ИЗОБРЕТЕНИЯ
[11] Технический результат заключается в повышении надёжности сортировочной машины.
[12] Технический результат достигается за счёт того, что сортировочная машина включает в себя:
[13] - став,
[14] - цепь тележек, выполненную с возможностью перемещения по ставу, включающую в себя множество тележек, каждая из которых содержит кузов, выполненный с возможностью нахождения в положении для сброса товара, в котором он наклонён в заданную сторону, и в положении для транспортировки товара,
[15] - по меньшей мере один приводной модуль, соединённый со ставом и выполненный с возможностью перемещения цепи тележек,
[16] - по меньшей мере один наклоняющий модуль, соединённый со ставом, выполненный с возможностью взаимодействия с соответствующей тележкой для перевода её кузова в положение для сброса товара и содержащий по меньшей мере один переключатель, выполненный выталкивающим,
[17] - возвращающий модуль, соединённый со ставом, выполненный с возможностью взаимодействия с соответствующей тележкой для перевода её кузова в положение для транспортировки товара и включающий в себя по меньшей мере две восходящие рампы, смонтированные со смещением друг относительно друга на ставе.
[18] В дополнительном аспекте предложенное техническое решение характеризуется тем, что по меньшей мере один переключатель наклоняющего модуля выполнен с возможностью нахождения в открытом положении и закрытом положении, а сортировочная машина содержит пульт управления, выполненный с возможностью взаимодействия с по меньшей мере одним наклоняющим модулем для перевода его по меньшей мере одного переключателя из закрытого положения в открытое положение и из открытого положения в закрытое положение.
[19] В дополнительном аспекте предложенное техническое решение характеризуется тем, что по меньшей мере одна тележка включает в себя по меньшей мере одно крыло.
[20] В дополнительном аспекте предложенное техническое решение характеризуется тем, что по меньшей мере одна тележка включает в себя плавник с по меньшей мере одним отверстием.
[21] В дополнительном аспекте предложенное техническое решение характеризуется тем, что по меньшей мере одна тележка включает в себя средство предотвращения самопроизвольного опрокидывания кузова.
[22] В дополнительном аспекте предложенное техническое решение характеризуется тем, что цепь тележек включает в себя по меньшей мере одну проставочную каретку, расположенную между по меньшей мере двух тележек.
[23] В дополнительном аспекте предложенное техническое решение характеризуется тем, что по меньшей мере одна проставочная каретка включает в себя крышу.
[24] В дополнительном аспекте предложенное техническое решение характеризуется тем, что по меньшей мере одна проставочная каретка включает в себя плавник с по меньшей мере одним отверстием.
[25] В дополнительном аспекте предложенное техническое решение характеризуется тем, что по меньшей мере один наклоняющий модуль включает в себя по меньшей мере один пневмоцилиндр.
[26] В дополнительном аспекте предложенное техническое решение характеризуется тем, что оно содержит по меньшей мере одно средство контроля работы по меньшей мере одного пневмоцилиндра по меньшей мере одного наклоняющего модуля.
[27] В дополнительном аспекте предложенное техническое решение характеризуется тем, что по меньшей мере один наклоняющий модуль включает в себя по меньшей мере один толкатель, выполненный в виде пластины.
[28] В дополнительном аспекте предложенное техническое решение характеризуется тем, что по меньшей мере один наклоняющий модуль включает в себя по меньшей мере одну направляющую, включающую в себя по меньшей мере одну нисходящую рампу и по меньшей мере один улавливатель.
[29] В дополнительном аспекте предложенное техническое решение характеризуется тем, что по меньшей мере один наклоняющий модуль включает в себя по меньшей мере один отбойник.
[30] В дополнительном аспекте предложенное техническое решение характеризуется тем, что по меньшей мере один отбойник расположен под по меньшей мере одной нисходящей рампой.
[31] В дополнительном аспекте предложенное техническое решение характеризуется тем, что по меньшей мере один приводной модуль включает в себя меньшей мере два зубчатых колеса.
[32] В дополнительном аспекте предложенное техническое решение характеризуется тем, что по меньшей мере один приводной модуль включает в себя пять зубчатых колёс.
[33] В дополнительном аспекте предложенное техническое решение характеризуется тем, что по меньшей мере один приводной модуль включает в себя по меньшей мере две пары фрикционных роликов.
[34] В дополнительном аспекте предложенное техническое решение характеризуется тем, что по меньшей мере один приводной модуль включает в себя по меньшей мере два упругих элемента.
[35] В дополнительном аспекте предложенное техническое решение характеризуется тем, что по меньшей мере один приводной модуль включает в себя зубчатые колёса для синхронизации вращения фрикционных роликов.
[36] В дополнительном аспекте предложенное техническое решение характеризуется тем, что по меньшей мере один приводной модуль включает в себя по меньшей мере один привод, представляющий собой мотор- редуктор.
[37] В дополнительном аспекте предложенное техническое решение характеризуется тем, что оно содержит по меньшей мере одно средство детектирования первой тележки.
[38] В дополнительном аспекте предложенное техническое решение характеризуется тем, что оно содержит по меньшей мере одно средство контроля перемещения тележек.
[39] В дополнительном аспекте предложенное техническое решение характеризуется тем, что оно содержит по меньшей мере одно средство контроля заполнения по меньшей мере одного пункта хранения.
[40] В дополнительном аспекте предложенное техническое решение характеризуется тем, что оно содержит по меньшей мере одно средство контроля разгрузки.
[41] В дополнительном аспекте предложенное техническое решение характеризуется тем, что оно содержит по меньшей мере одно средство обнаружения прикреплённого товара.
[42] В дополнительном аспекте предложенное техническое решение характеризуется тем, что оно содержит колёсный блок, включающий в себя три колеса, при этом два колеса ориентированы вертикально, а третье колесо ориентировано горизонтально и расположено между двумя вертикально ориентированными колёсами.
[43] В дополнительном аспекте предложенное техническое решение характеризуется тем, что по меньшей мере один приводной модуль содержит по меньшей мере один привод, а сортировочная машина включает в себя по меньшей мере одно средство контроля по меньшей мере одного привода по меньшей мере одного приводного модуля.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
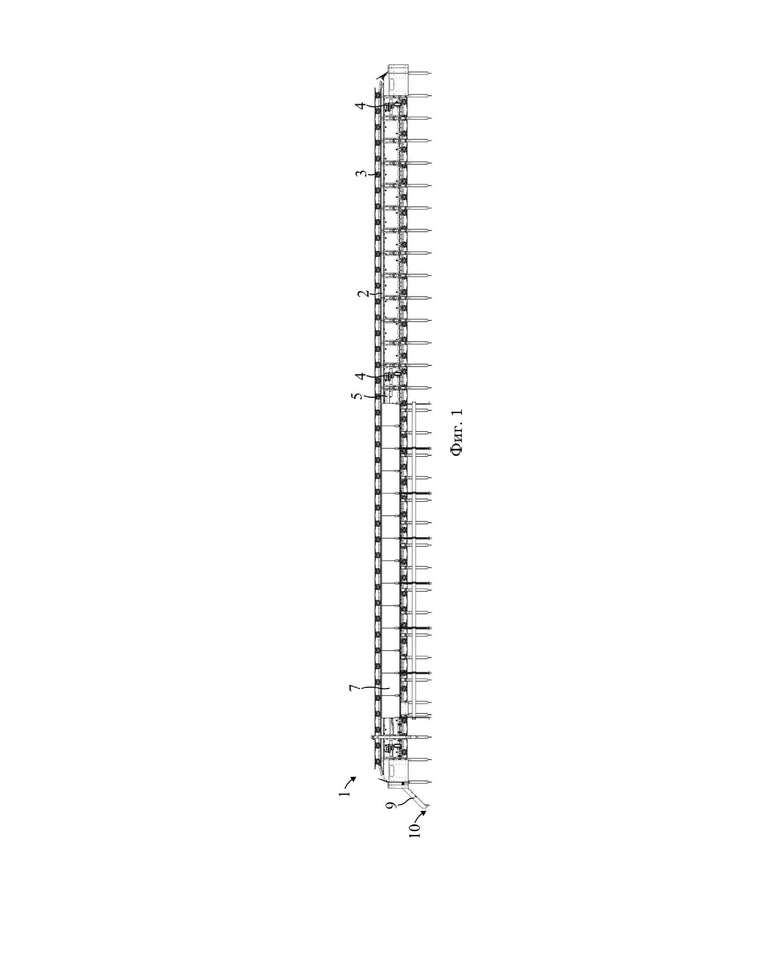
[44] На Фиг. 1 представлен вид сбоку варианта выполнения сортировочной машины.
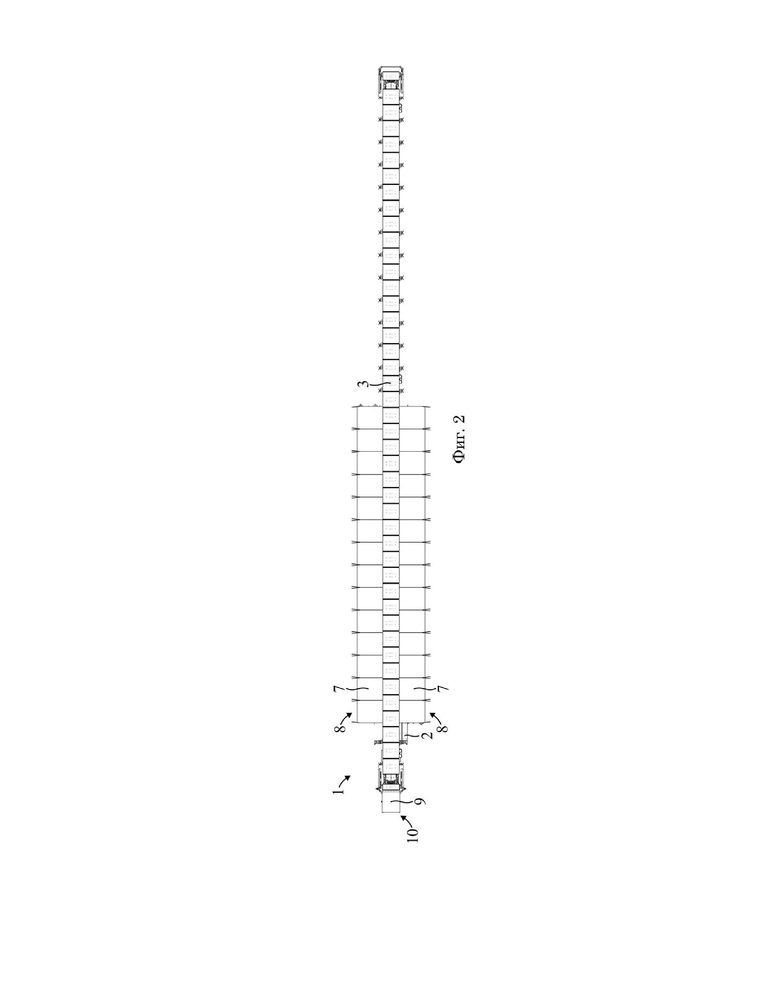
[45] На Фиг. 2 представлен вид сверху варианта выполнения сортировочной машины.
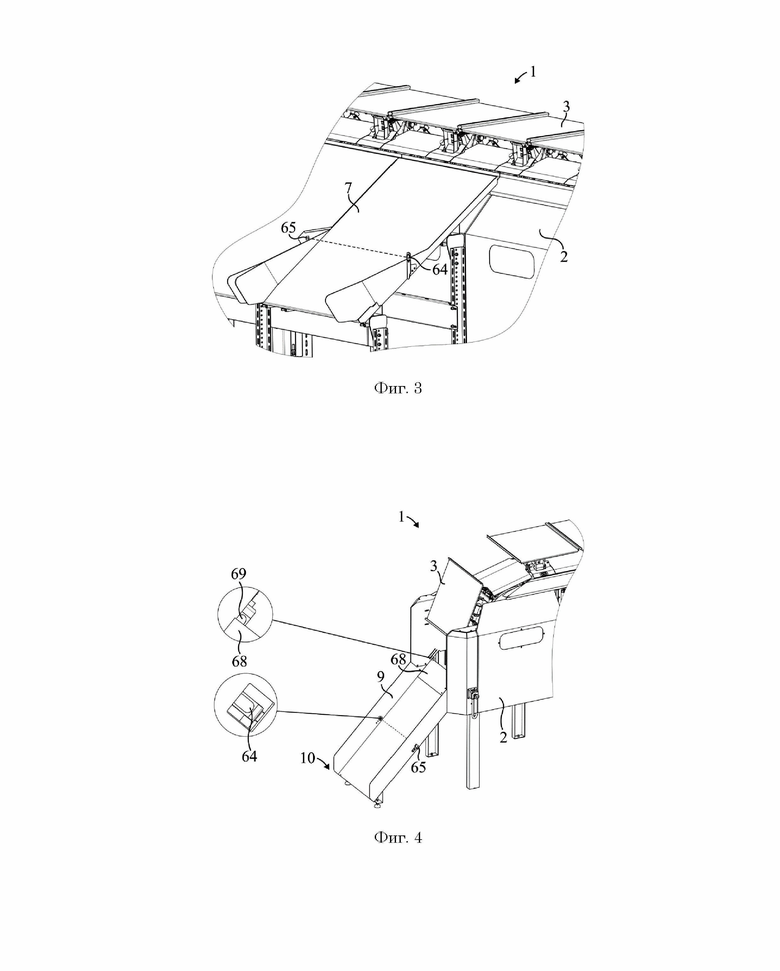
[46] На Фиг. 3 представлен общий вид одного из лотковых спусков выгрузки.
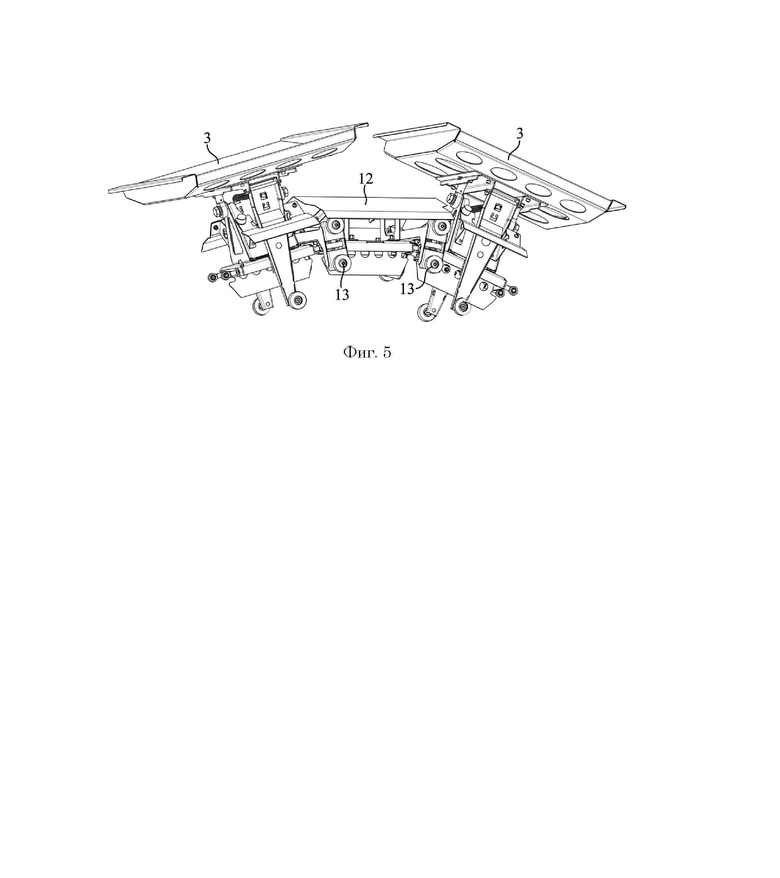
[47] На Фиг. 4 представлен общий вид лотковый спуск отбраковки.
[48] На Фиг. 5 представлен участок цепи тележек.
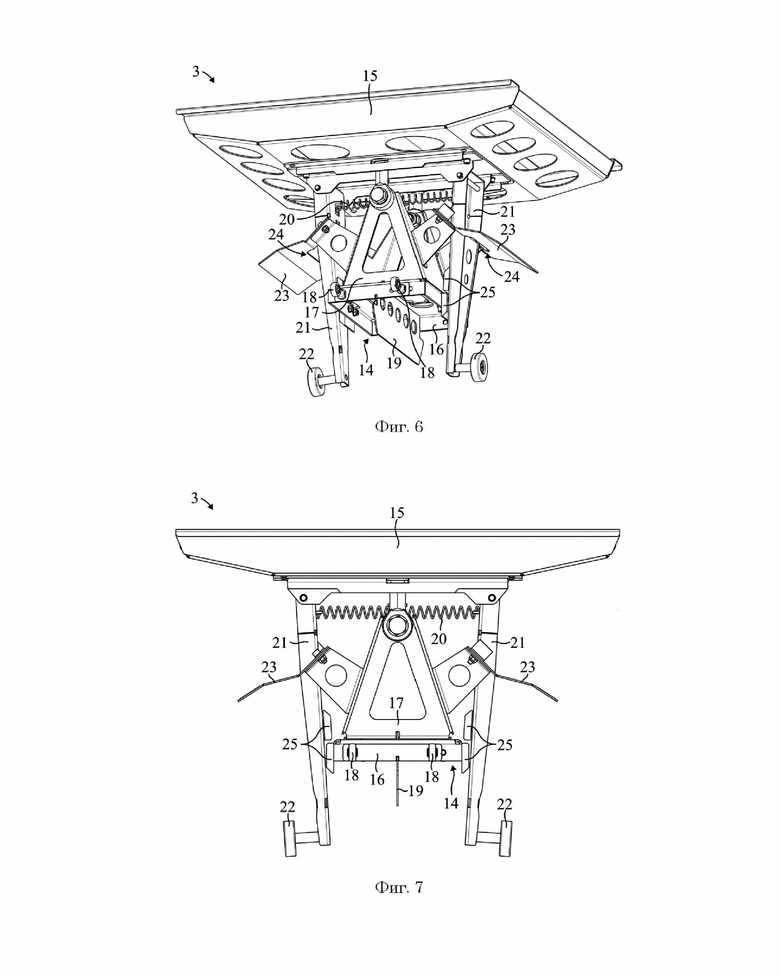
[49] На Фиг. 6 представлен вид снизу тележки.
[50] На Фиг. 7 представлен вид спереди тележки.
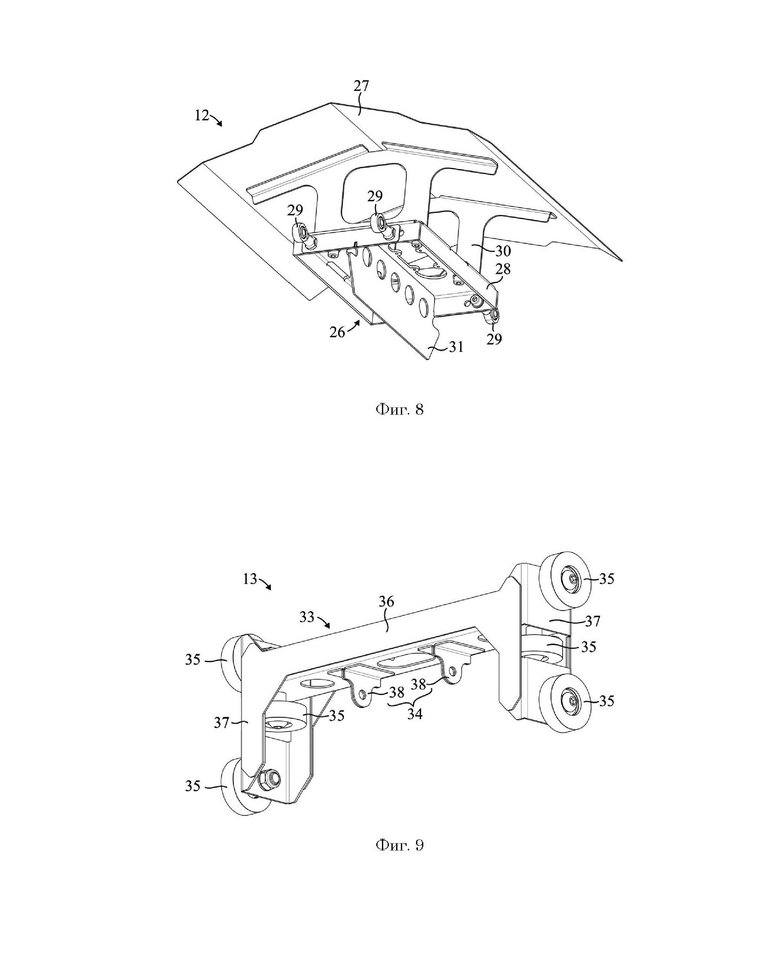
[51] На Фиг. 8 представлен вид снизу каретки.
[52] На Фиг. 9 представлен вид снизу колёсного блока.
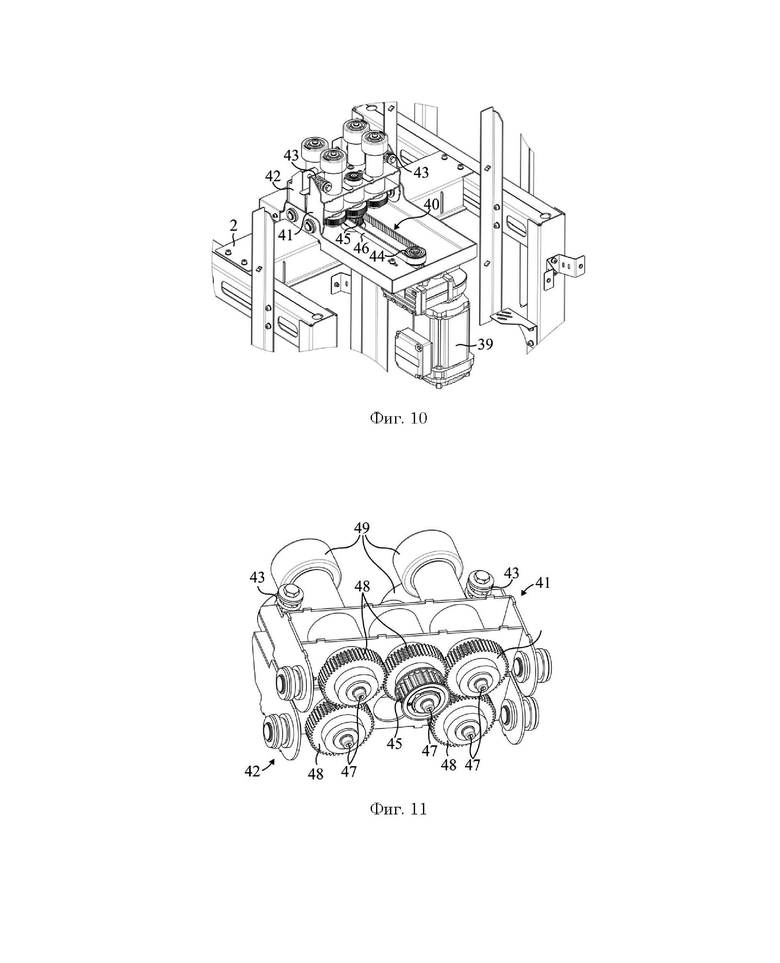
[53] На Фиг. 10 представлен общий вид приводного модуля.
[54] На Фиг. 11 представлена часть приводного модуля.
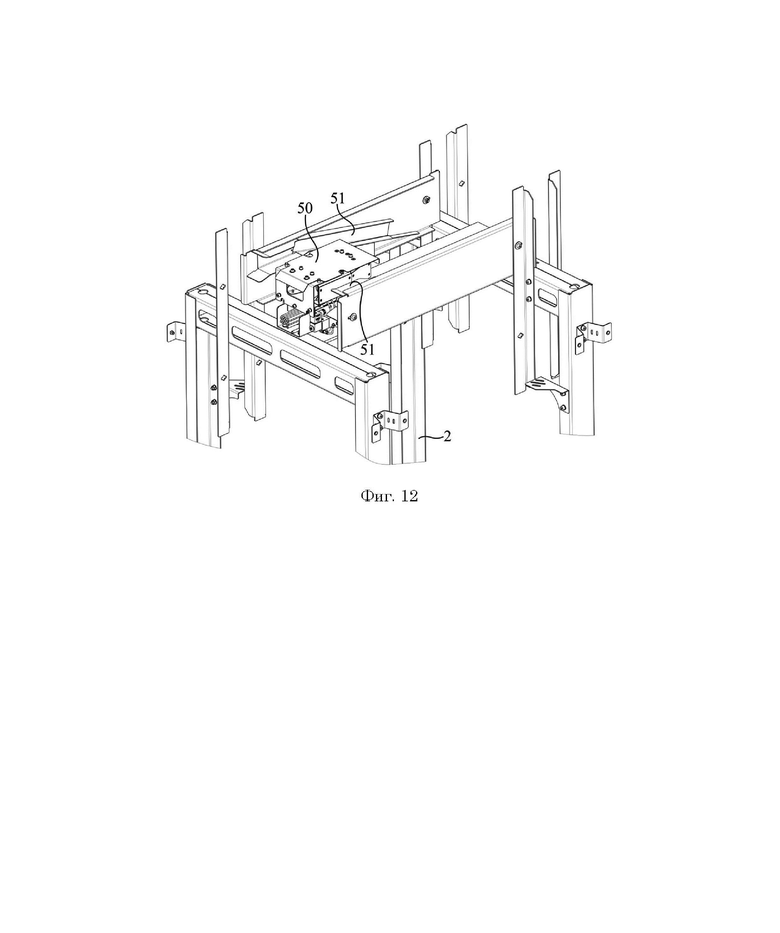
[55] На Фиг. 12 представлен общий вид наклоняющего модуля.
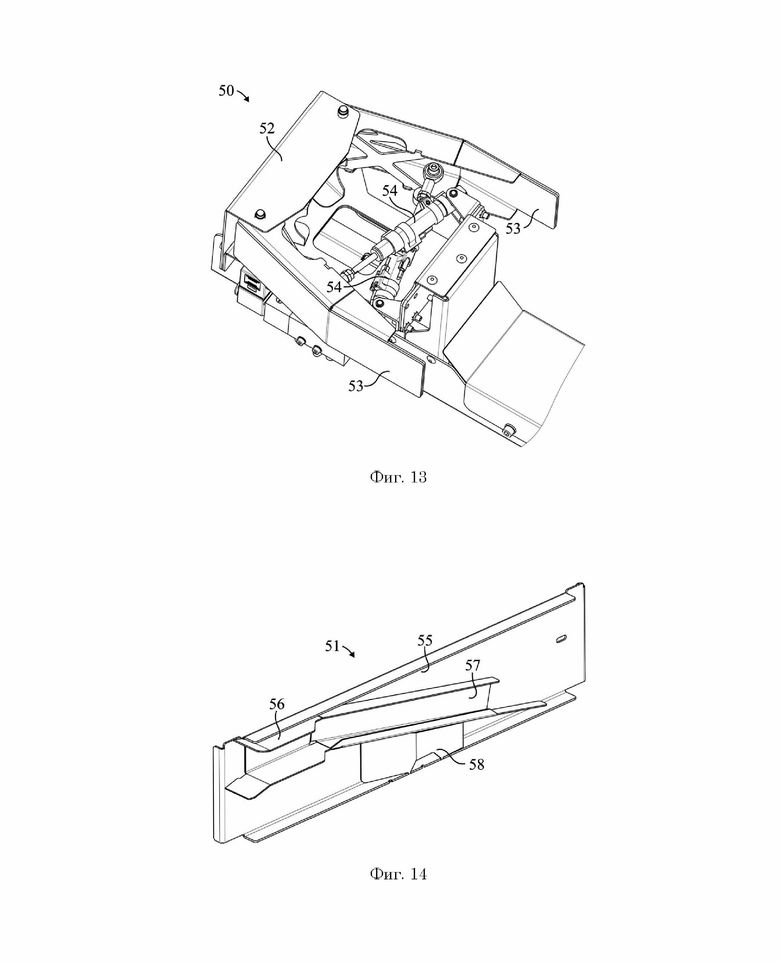
[56] На Фиг. 13 представлен общий вид переключателя.
[57] На Фиг. 14 представлен общий вид направляющей.
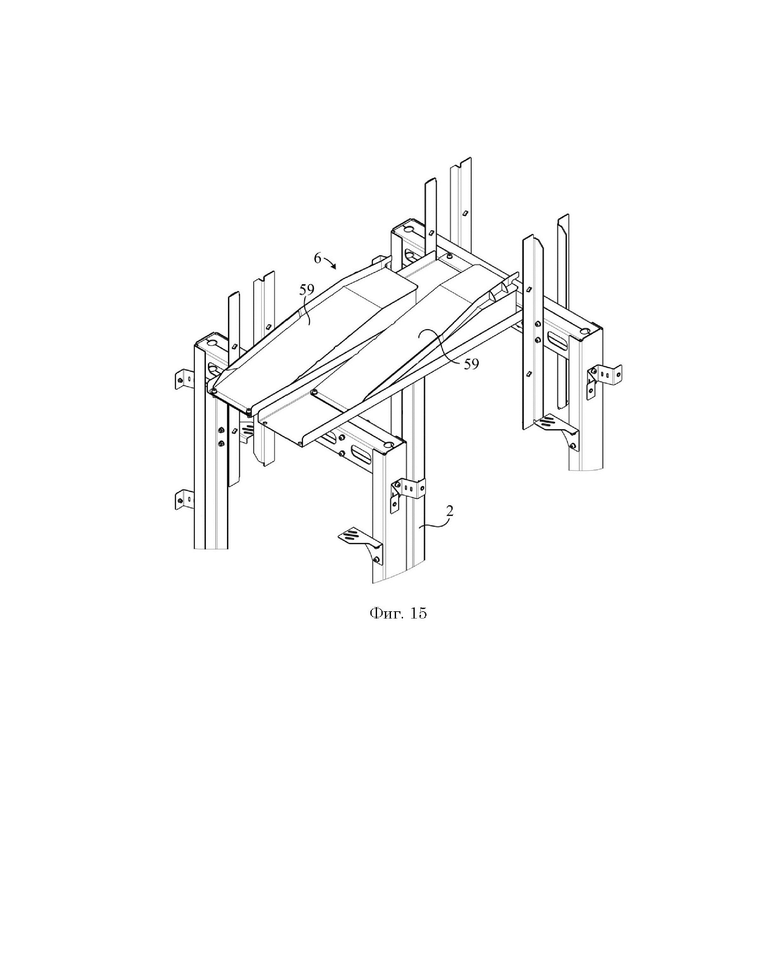
[58] На Фиг. 15 представлен общий вид возвращающего модуля.
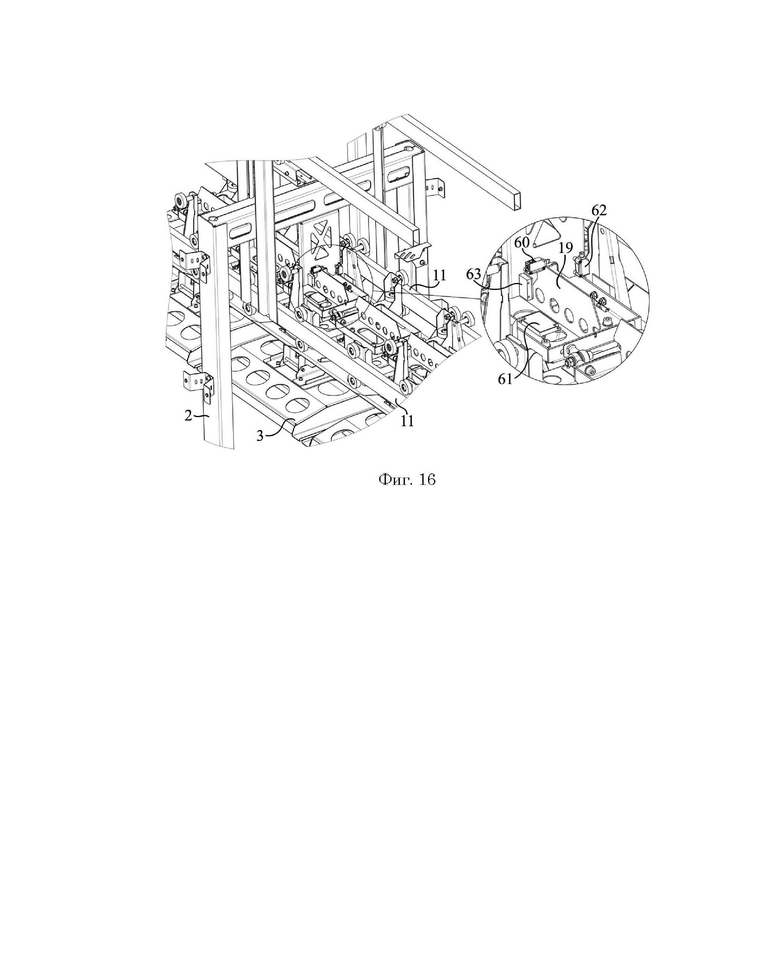
[59] На Фиг. 16 представлен нижний участок става.
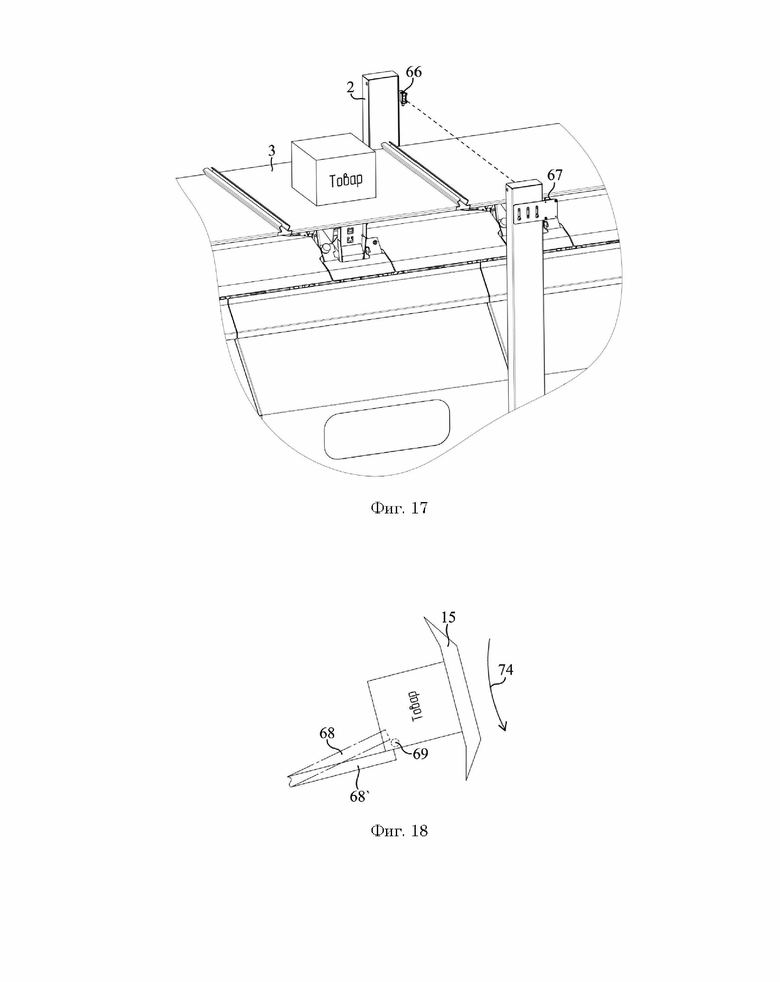
[60] На Фиг. 17 представлен верхний участок става.
[61] На Фиг. 18 представлен механизм работы средства обнаружения прикреплённого товара.
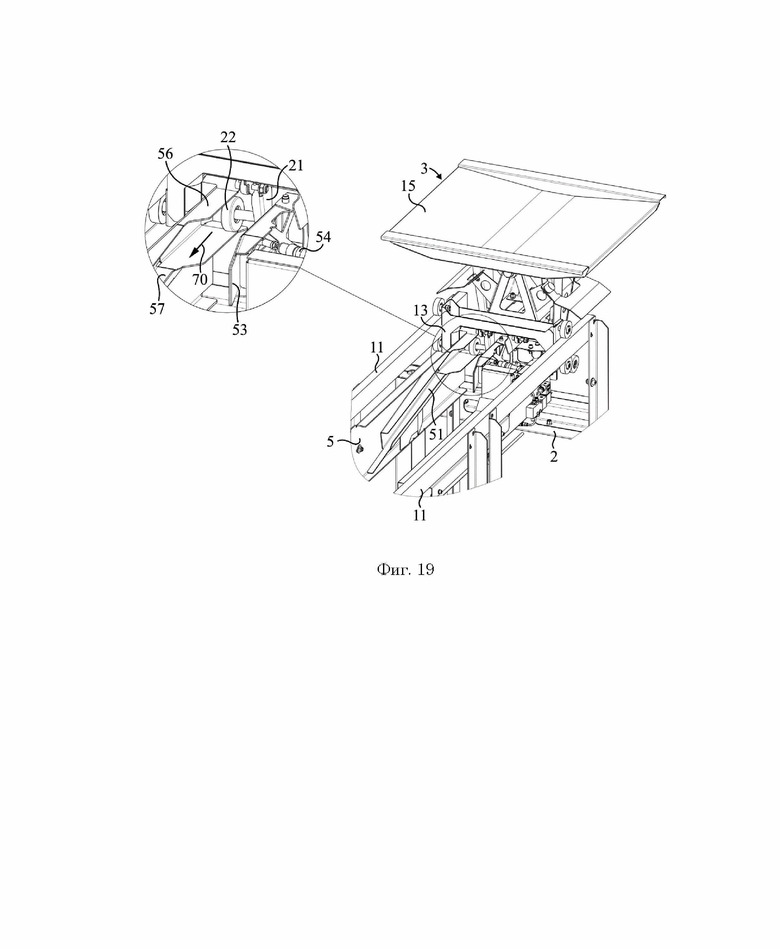
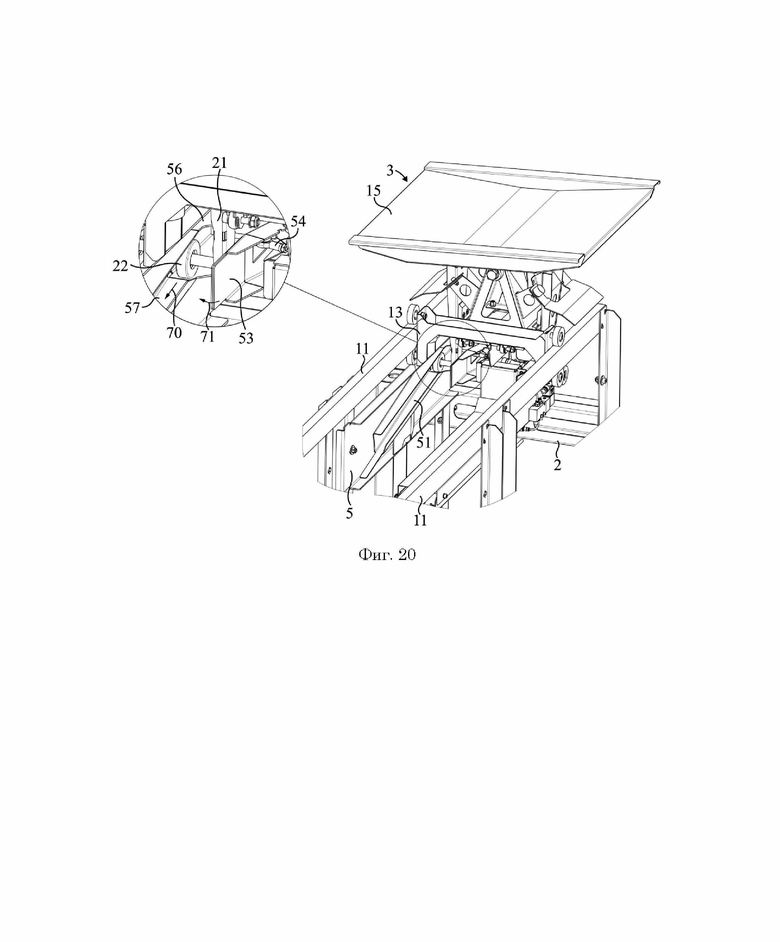
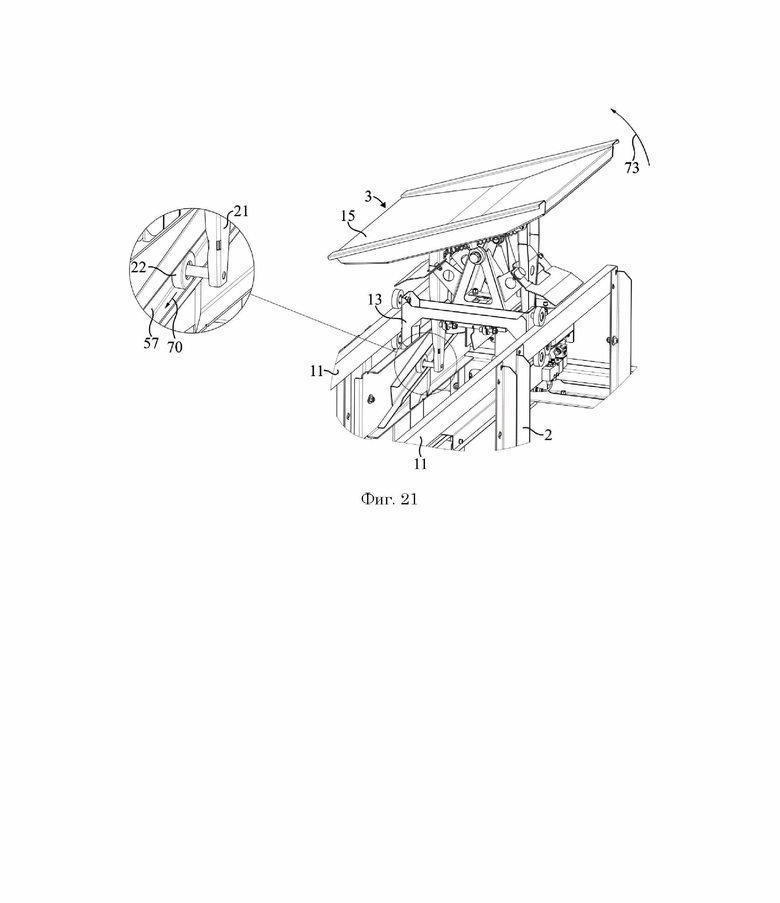
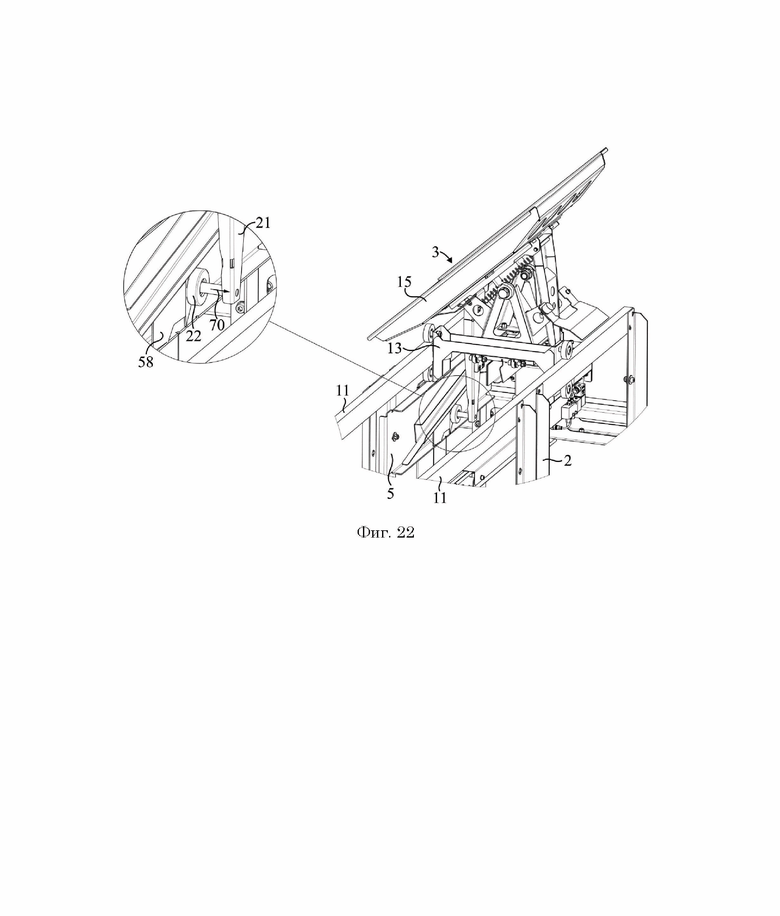
[62] На Фиг. 19-22 представлены этапы способа перевода кузова тележки из транспортного положения в наклонное.
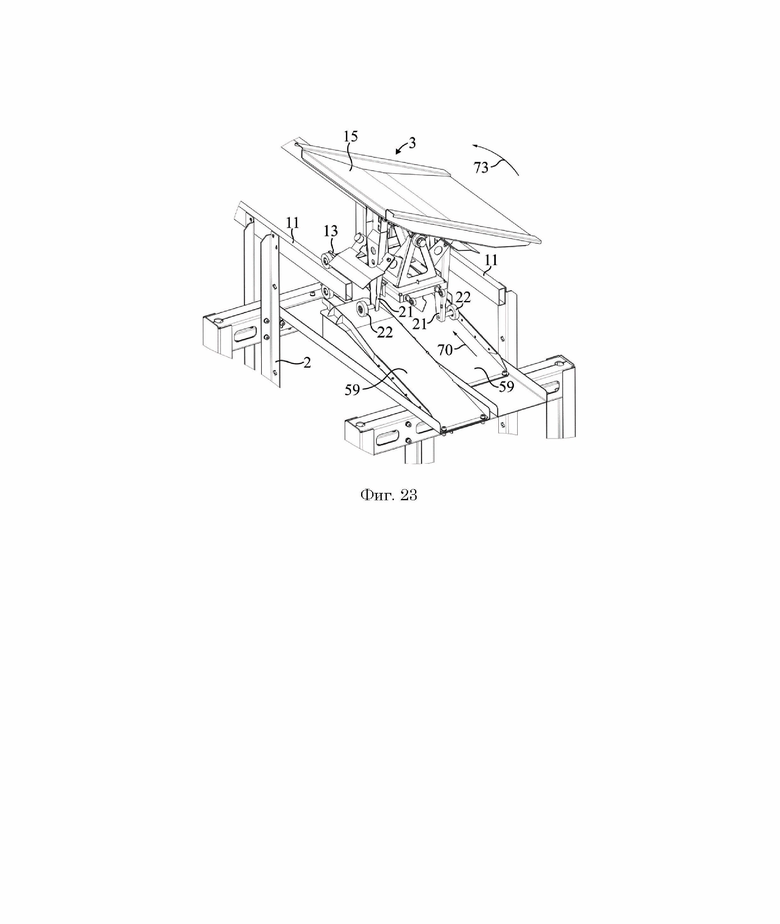
[63] На Фиг. 23 представлен этап способа перевода кузова тележки из наклонного положения в транспортное.
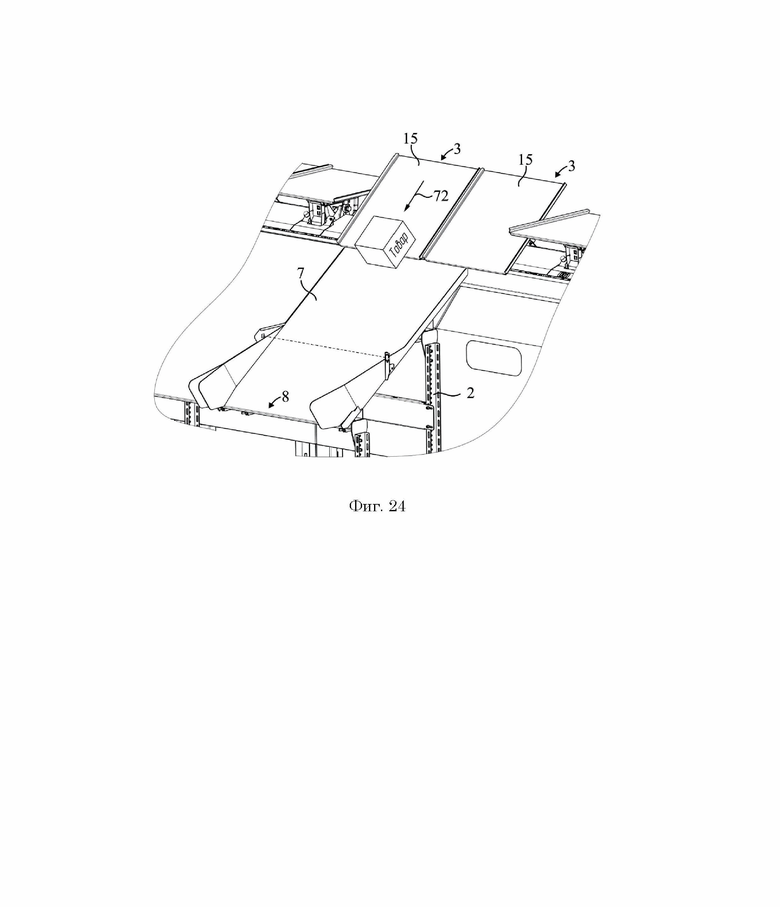
[64] На Фиг. 24 представлен сброс товара в пункт хранения.
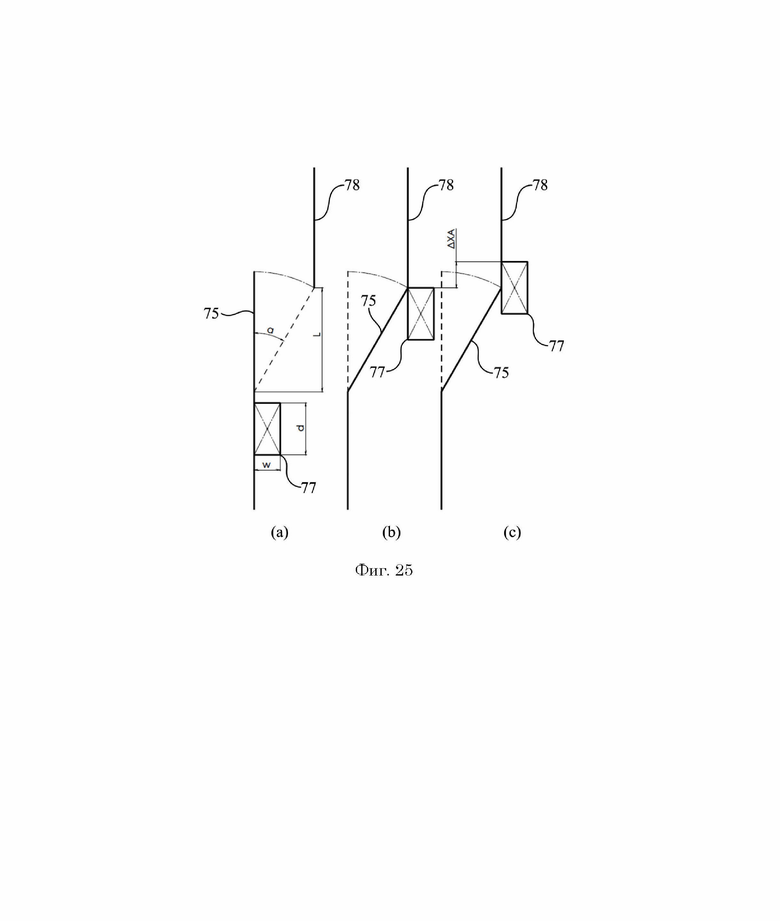
[65] На Фиг. 25 представлен схема работы выталкивающего переключателя.
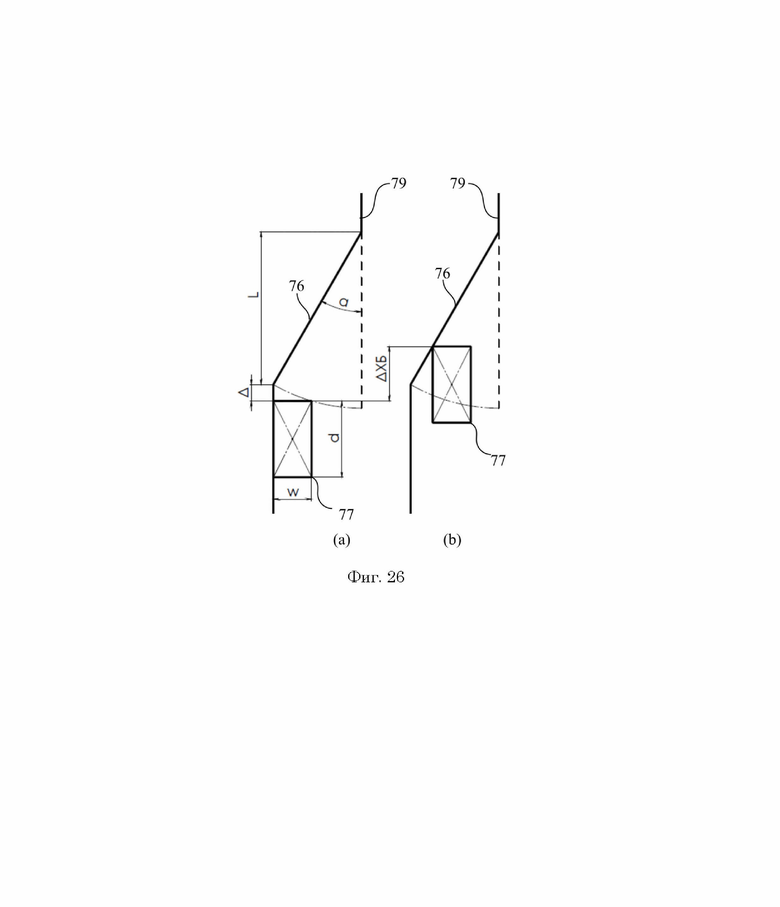
[66] На Фиг. 26 представлен схема работы втягивающего переключателя.
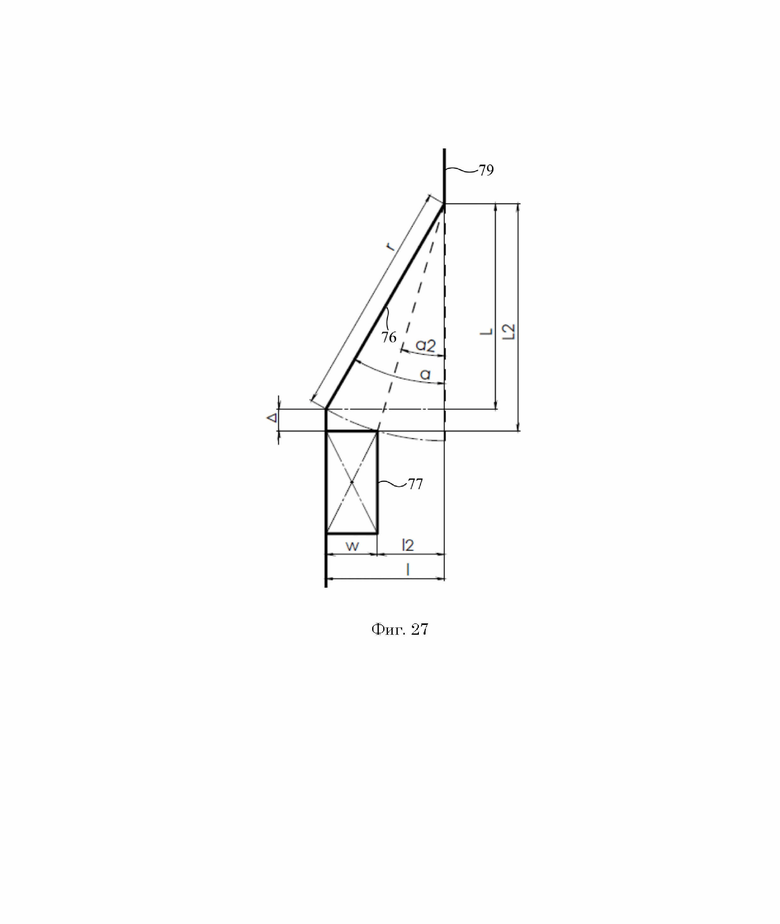
[67] На Фиг. 27 схема расчёта зависимости расстояния Д от фронта тестового колеса до точки захода на втягивающий переключатель от вводных параметров (L и а) для втягивающего переключателя.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[68] Со ссылкой на Фиг. 1, 2, сортировочная машина 1 включает в себя став 2, цепь тележек 3, множество одинаковых приводных модулей 4, множество одинаковых наклоняющих модулей 5, возвращающий модуль 6, пульт управления и систему контроля.
[69] Став 2 включает в себя балочных каркас, колею, множество лотковых спусков 7 выгрузки, множество пунктов 8 выгрузки, лотковый спуск 9 отбраковки и пункт 10 отбраковки.
[70] Балочный каркас става 2 включает в себя множество горизонтальных балок и вертикальных стоек.
[71] Со ссылкой на Фиг. 16, колея става 2 выполнена бесконечной, расположена в вертикальной плоскости и включает в себя два рельса 11.
[72] Со ссылкой на Фиг. 1, 2, 3, лотковые спуски 7 выгрузки расположены в заданных местах по обе стороны от колеи става 2 перпендикулярно продольной оси става 2 и обеспечивают перемещение товара от тележки 3 к соответствующему пункту 8 выгрузки. Для каждого наклоняющего модуля 5 обеспечено по два лоткового спуска 7 выгрузки, которые расположены оппозитно друг другу, что позволяет сгружать (сбрасывать, выгружать) товар (груз) с тележки 3 в любую из двух сторон по ходу её движения.
[73] Со ссылкой на Фиг. 1, 2, 4, лотковый спуск 9 отбраковки расположен в торцевой части става 2 после лотковых спусков 7 выгрузки на продольной оси става 2 и обеспечивают перемещение товара от тележки 3 к пункту 10 отбраковки.
[74] Со ссылкой на Фиг. 3, 4, лотковые спуски 7 выгрузки и лотковый спуск 9 отбраковки представляют собой наклонные горки, по которым товар под действием силы тяжести перемещается к соответствующему пункту хранения: пункту 8 выгрузки или пункту 10 отбраковки. Пункт 8 выгрузки примыкает к лотковому спуску 7 выгрузки и расположен в его конце. Пункт 10 отбраковки примыкает к лотковому спуску 9 отбраковки и расположен в его конце.
[75] На Фиг. 5 представлен участок цепи тележек 3. Цепь тележек 3, подвижно соединена со ставом 2, выполнена бесконечной (замкнутой) и с возможностью перемещения по колее става 2 и включает в себя множество одинаковых тележек 3, множество одинаковых проставочных кареток 12 и множество одинаковых колёсных блоков 13.
[76] На Фиг. 6, 7 представлена одна из тележек 3. Тележка 3 включает в себя раму 14, кузов 15 и поворотный механизм.
[77] Рама 14 тележки 3 включает в себя основание 16, стойку 17, множество сцепок 18, и плавник 19. Сцепки 18 тележки 3 жёстко прикреплены к передней и задней боковым поверхностям основания 16 тележки 3. Стойка 17 тележки 3 жёстко закреплена на основании 16 тележки 3. Плавник 19 тележки 3 выполнен в виде плоской детали, жёстко закреплён в нижней части основания 16 тележки 3, расположен в центральной части основания 16 тележки 3 в плоскости продольной оси и вертикальной оси тележки 3 и содержит множество сквозных отверстий.
[78] Кузов 15 тележки 3 предназначен для удержания товара, шарнирно закреплён на стойке 17 тележки 3, выполнен с возможностью поворота вокруг продольной оси тележки 3 в заданную сторону и представляет собой платформу. Кузов 15 тележки 3 выполнен с возможностью нахождения в положении для сброса (выгрузки) товара, в котором он наклонён в заданную сторону и которое обеспечивает сброс (выгрузку) товара, (далее - наклонное положение) и в положении для транспортировки товара, в котором он выполнен с возможностью перемещения товара и которое обеспечивает транспортировку товара до места его сброса (выгрузки), (далее - транспортное положение).
[79] Поворотный механизм тележки 3 предназначен для поддержания кузова 15 тележки 3 в заданном положении при перевозке товара и для поворота кузова 15 тележки 3 в заданную сторону, например, для его разгрузки, и включает в себя пружину 20 растяжения, два рычага 21, два колеса 22, два крыла 23 и средство предотвращения самопроизвольного опрокидывания. Пружина 20 растяжения тележки 3 предназначена для смещения соответствующего рычага 21 тележки 3 к центру тележки 3 и представляет собой известную из уровня техники пружину растяжения. Рычаги 21 тележки 3 с одной стороны шарнирно соединены с кузовом 15 тележки 3 и расположены с двух сторон от продольной оси тележки 3. Колёса 22 тележки 3 представляют собой известные из уровня техники колёсики, жёстко и с возможностью поворота вокруг своей оси закреплены на свободных концах каждого из рычагов 21 тележки 3. Крылья 23 (или «защитные экраны 23») тележки 3 препятствуют случайному попаданию упавшего товара или иного постороннего предмета во внутрь механизма сортировочной машин 1 (внутрь става 2), жёстко закреплены на стойке 17 тележки 3, расположены вертикально и с двух сторон от продольной оси тележки 3 и включают в себя отверстия 24, через которые пропущены соответствующие рычаги 21. Средство предотвращения самопроизвольного опрокидывания предназначено для предотвращения самопроизвольного наклона кузова 15 тележки 3 и включает в себя две пары зацепов 25, расположенных с двух сторон от продольной оси тележки 3, при этом в каждой паре зацепов 25 один из зацепов 25 жёстко закреплён на соответствующем рычаге 21 тележки 3, а второй - на раме 14. Пружина 20 растяжения обеспечивает поджим рычагов 21 к основанию 16, в результате чего зацепы 25 средства предотвращения самопроизвольного опрокидывания не позволяют опрокинуться кузову 15 процессе движения тележки 3.
[80] На Фиг. 8 представлена одна из проставочных кареток 12. Проставочная каретка 12 включает в себя раму 26 и крышу 27.
[81] Рама 26 проставочной каретки 12 включает в себя основание 28, множество сцепок 29, стойку 30 и плавник 31. Сцепки 29 проставочной каретки 12 жёстко прикреплены к передней и задней боковым поверхностям основания 28 проставочной каретки 12 и выполнены с возможностью соединения с соответствующими сцепками 18 тележки 3. Стойка 30 проставочной каретки 12 жёстко закреплена на основании 28 проставочной каретки 12 и представляет собой два ребра 32, разнесённых в пространстве, расположенных в передней и задней частях основания 28 проставочной каретки 12 и ориентированных вертикально. Плавник 31 проставочной каретки 12 выполнен в виде плоской детали, жёстко закреплён в нижней части основания 28 проставочной каретки 12, расположен в центральной части основания 28 проставочной каретки 12 в плоскостях продольной оси и вертикальной оси проставочной каретки 12 и содержит множество сквозных отверстий. Строение нижних частей тележек 3 и нижних частей проставочной кареток 12 совпадают.
[82] Крыша 27 (или «защитный экран 27») проставочной каретки 12 препятствует случайному попаданию упавшего товара или иных посторонних предметов во внутрь механизма сортировочной машин 1 (внутрь става 2), выполнена в виде плоской детали и двускатной и жёстко закреплена на стойке 30 проставочной каретки 12. Препятствование попаданию во внутрь сортировочной машины 1 товаров или иных посторонних предметов, обеспечиваемое крышей 27 проставочной каретки 12, предотвращает повреждение механизмов сортировочной машины 1, а значит повышает её отказоустойчивость, а соответственно и её надёжность.
[83] На Фиг. 9 колёсный блок 13. Колёсный блок 13 включает в себя раму 33, средство 34 крепления и две тройки колёс 35 и обеспечивает перемещение цепи тележек 3 по рельсам 11 става 2. Рама 33 колёсного блока 13 выполнена П-образной и включает в себя полку 36 и две ножки 37. Средство 34 крепления представляет собой две проушины 38, закреплённые на нижней поверхности полки 36 рамы 33 колёсного блока 13. Каждая тройка колёс 35 колёсного блока 13 закреплена на соответствующей ножке 37 рамы 33 колёсного блока 13, при этом в каждой тройке колёс 35 колёсного блока 13 два колеса 35 ориентированы вертикально, расположены с внешней стороны ножки 37 рамы 33 колёсного блока 13 и выполнены с возможностью соединения с рельсами 11, а одно из колёс 35 ориентировано горизонтально и расположено между упомянутыми двумя колёсами 35 с внутренней стороны ножки 37 рамы 33 колёсного блока 13. Расстояние между колёсами 35 колёсного блока 13, расположенных с внешней стороны ножки 37 рамы 33 колёсного блока 13, равно высоте рельс 11, что позволяет колёсному блоку 13 подвижно закрепляться на рельсах 11. Две проушины 38 средства 34 крепления расположены между соединёнными сцепками 18 тележки 3 и сцепками 29 проставочной каретки 12 (см. Фиг. 5), что позволило за счёт двух сборочных операций соединить тележку 3, проставочную каретку 12 и колёсный блок 13. Горизонтальное колесо 35 в каждой группе колёс 35 колёсного блока 13 находится на оси отверстий проушин 38 и на оси сцепления тележек 3 и проставочной кареток 12, что позволяет избежать смещения горизонтального колеса 35 в каждой группе колёс 35 колёсного блока 13 относительно рельса 11 при повороте колёсного блока 13. Происходит только поворот горизонтального колеса 35 относительно рельса 11, что снижает износ этого колеса 35, повышает отказоустойчивость сортировочной машины 1, а соответственно и её надёжность.
[84] На Фиг. 10 представлен один из одинаковых приводных модулей 4. Приводной модуль 4 соединён со ставом 2, выполнен с возможностью перемещения цепи тележек 3 и содержит привод 39, ремённую передачу 40, ведущий приводной блок 41, ведомый приводной блок 42 и два упругих элемента 43. Связь между приводом 39 приводного модуля 4 и ведущим приводным блоком 41 приводного модуля 4 обеспечена за счёт ремённой передачи 40, включающей в себя ведущий шкив 44, жёстко закреплённый на приводе 39, ведомый шкив 45, жёстко закреплённый в ведущем приводном блоке 41, и ремень 46, соединённый с ведущим шкивом 44 и с ведомым шкивом 45. Ведущий приводной блок 41 примыкает к ведомому приводному блоку 42.
[85] На Фиг. 11 представлены приводные блоки 41, 42. Каждый приводной блок 41, 42 включает в себя множество стержней 47, множество зубчатых колёс 48 и множество фрикционных роликов 49. Зубчатые колёса 48 приводных блоков 41, 42 зацеплены друг с другом и жёстко закреплены на стрежнях 47 и образуют зубчатую передачу. Фрикционные ролики 49 приводных блоков 41, 42 содержат эластомерные поверхности, выполненные с возможностью примыкания к плавникам 19 тележек 3 и к плавникам 31 проставочных кареток 12. На одном из стержней 47 ведущего приводного блока 41 жёстко закреплён ведомый шкив 45 ремённой передачи 40, что позволяет передавать момент вращения от привода 39 к фрикционным роликам 49. Постоянное прижатие фрикционных роликов 49 приводных блоков 41, 42 к плавникам 19 тележек 3 и к плавникам 31 проставочных кареток 12 обеспечено за счёт упомянутых упругих элементов 43 приводного модуля 4.
[86] Каждый упругий элемент 43 приводного модуля 4 представляет собой пружину сжатия и предназначен для стягивания ведущего приводного блока 41 и ведомого приводного блока 42 друг к другу. Два упругих элемента 43 приводного модуля 4 размещены таким образом, чтобы обеспечить постоянное прижатие множества фрикционных роликов 49 к плавнику 19 тележки 3 или плавнику 31 проставочной каретки 12.
[87] На Фиг. 12 представлен участок става 2 с наклоняющим модулем 5. Наклоняющий модуль 5 соединён со ставом 2, выполнен с возможностью взаимодействия с соответствующей тележкой 3 для приведения её кузова 15 в наклонное положение и включает в себя переключатель 50 и две одинаковых направляющих 51, расположенных по двум (оппозитным) сторонам переключателя 50 и ориентированных таким образом, что при продольном перемещении по ним колёс 22 тележек 3 в направлении движения цепи тележек 3 их рычаги 21 одновременно перемещаются также и вниз.
[88] На Фиг. 13 представлен переключатель 50 наклоняющего модуля 5. Переключатель 50 наклоняющего модуля 5 выполнен выталкивающим и содержит корпус 52, два толкателя 53 и средство перемещения толкателя 53. Корпус 52 переключателя 50 наклоняющего модуля 5 жёстко закреплён в ставе 2. Толкатели 53 переключателя 50 наклоняющего модуля 5 выполнены в виде пластин и с возможностью горизонтального перемещения, перемещения (смещения) рычагов 21 тележек 3 и открытия по ходу движения цепи тележек 3. Средство перемещения толкателя 53 переключателя 50 наклоняющего модуля 5 выполнено с возможностью перемещения толкателей 53 переключателя 50 и представляет собой два двухсторонних пневмоцилиндра 54, каждый из которых шарнирно соединён с одной стороны с одним из толкателей 53 переключателя 50 наклоняющего модуля 5, а с другой - с корпусом 52 переключателя 50 наклоняющего модуля 5, и включает в себя датчик конечного положения. Переключатель 50 наклоняющего модуля 5 выполнен с возможностью нахождения в открытом положении и в закрытом положении. В открытом положении переключателя 50 по меньший мере один толкатель 53 переключателя 50 наклоняющего модуля 5 смещён вбок относительно продольной оси переключателя 50 и выполнен с возможностью взаимодействия с соответствующей тележкой 3 для смещения рычага 21 тележки 3 (выталкивания рычага 21 тележки 3 вбок, в сторону соответствующей направляющей 51). В закрытом положении переключателя 50 оба толкателя 53 расположены максимально близко к продольной оси переключателя 50 и не препятствуют прохождению рычагов 21 других тележек 3.
[89] На Фиг. 14 представлена одна из направляющих 51 наклоняющего модуля 5. Направляющая 51 наклоняющего модуля 5 включает в себя опорный элемент 55, жёстко соединённый с ставом 2, и расположенные с внутренней стороны става 2 улавливатель 56, нисходящую рампу 57 и отбойник 58. Улавливатель 56 направляющей 51 наклоняющего модуля 5 имеет уширение с одной стороны и соединён с нисходящей рампой 57 направляющей 51 наклоняющего модуля 5 с другой. Нисходящая рампа 57 направляющей 51 наклоняющего модуля 5 выполнена с возможностью удержания внутри себя перемещаемого по ней колеса 22 тележки 3. Отбойник 58 направляющей 51 наклоняющего модуля 5 расположен под нисходящей рампой 57 направляющей 51 наклоняющего модуля 5 и выполнен с возможностью плавного изменения траектории движения взаимодействующего с ним колеса 22 тележки 3 в направлении продольной оси тележки 3.
[90] На Фиг. 15 представлен возвращающий модуль 6. Возвращающий модуль 6 соединён со ставом 2, выполнен с возможностью взаимодействия с тележками 3 для приведения кузова 15 взаимодействующей с ним тележки 3 в транспортное положение и включает в себя две восходящие по движению цепи тележек 3 рампы 59, ориентированные таким образом, что при продольном перемещении по ним колёс 22 тележек 3 в направлении движения цепи тележек 3 их рычаги 21 одновременно перемещаются также и вверх, и смонтированные со смещением друг относительно друга на ставе 2, чтобы смягчить удары колёс 22 и рычагов 21 тележек 3 о их наклонные плоскости. Такое расположение восходящих рамп 59 возвращающего модуля 6 снижает вероятность поломки тележек 3 и повышает отказоустойчивость сортировочной машины 1, а соответственно и её надёжность.
[91] Пульт управления сортировочной машины 1 соединён со множеством приводных модулей 4, со множеством наклоняющих модулей 5 и с системой контроля, выполнен с возможностью принимать данные и (или) сигналы от по меньшей мере одного устройства, передавать данные и (или), например, управляющие, сигналы в по меньшей мере одно устройство обработки принятых данных и может включать в себя по меньшей мере один известный из уровня техники микропроцессор и по меньшей мере один известный из уровня техники машиночитаемый носитель. Пульт управления сортировочной машины 1 может быть соединён с по меньшей мере одним устройством посредством проводного и(или) беспроводного канала связи. На по меньшей мере одном машиночитаемом носителе пульта управления могут быть записаны инструкции работы сортировочной машины 1 в рабочем режиме и в аварийном режиме. Пульт управления сортировочной машины 1 может представлять собой известный из уровня техники программируемый логический контроллер, микроконтроллер. Пульт управления сортировочной машины 1 может быть закреплён на ставе 2 или представлять собой отдельное устройство. Пульт управления сортировочной машины 1 выполнен с возможностью взаимодействия с наклоняющими модулями 5 для перевода их переключателей 50 из закрытого положения в открытое положение и из открытого положения в закрытое положение.
[92] Система контроля включает в себя средство детектирования первой (опорной, реперной, ссылочной, контрольной) тележки 3, средство контроля перемещения тележек 3, множество средств контроля заполнения пунктов хранения, средство контроля разгрузки (или «средство обнаружения неотсортированного товара»), средство обнаружения прикреплённого товара, множество средств контроля работы пневмоцилиндров 54 и множество средств контроля приводов 39 приводных модулей 4.
[93] Со ссылкой на Фиг. 16, средство детектирования первой тележки 3 включает в себя оптический датчик 60, закреплённый на первой тележке 3, и отражатель 61, закреплённый на ставе 2, обращённый своей отражающей поверхностью в направлении оптического датчика 60 и выполненный с возможностью отражения излучения оптического датчика 60. Средство детектирования первой тележки 3 выполнено с возможностью передачи данных о детектировании первой тележки 3 в пульт управления. Пульт управления принимает этот сигнал, вычисляет значение скорости и позицию первой, тележки 3 и сравнивает с расчётными значениями скорости и позиции для этой тележки 3. Если расчётные значения скорости и позиции первой тележки 3 не совпадают с фактическими, то пульт управления формирует и передаёт управляющий сигнал об остановке привода 39 в приводные модули 4. При принятии упомянутого управляющего сигнала об остановке привода 39 приводные модули 4 прекратят свою работу произойдёт аварийная остановка цепи тележек 3. Данный сигнал позволяет локализовать возможную неисправность сортировочной машины 1. Средство детектирования первой тележки 3 используют для отслеживания полного оборота цепи тележек 3 и передаёт данные в пульт управления сортировочной машины 1. В качестве первой тележки 3 может быть принята любая тележка 3 из цепи тележек 3.
[94] Со ссылкой на Фиг. 16, средство контроля перемещения тележек 3 включает в себя оптический датчик 62, закреплённый на ставе 2, и рефлектор 63, закреплённый на ставе 2, обращённый своей отражающей поверхностью в направлении оптического датчика 62 и выполненный с возможностью отражения излучения оптический датчика 62. При этом оптический датчик 62 расположен таким образом, что луч оптического датчика 62 выполнен с возможностью попадания в отверстия плавников 19 тележек 3 и плавников 31 проставочных кареток 12, что позволяет получать информацию о количестве проезжающих мимо тележек 3 и проставочных кареток 12 в единицу времени. Средство контроля перемещения тележек 3 выполнено с возможностью передачи сигналов в пульт управления. Пульт управления принимает данные и вычисляет скорость движения цепи тележек 3, например, по количеству просветов между плавниками 19 в единицу времени, а также их положение в заданный момент времени. Средство контроля перемещения тележек 3 используют для отслеживания скорости и положения (позиции) тележек 3.
[95] Со ссылкой на Фиг. 3, 4, каждое средство контроля заполнения каждого пункта хранения выполнено с возможностью детектирования переполнения соответствующего пункта хранения и включает в себя датчик переполнения, включающий в себя оптический датчик 64 и рефлектор 65. Оптический датчик 64 средства контроля заполнения пункта хранения закреплён на одной стенке на одной стенке лоткового спуска 7 выгрузки и обращён в сторону рефлектора 65. Рефлектор 65 средства контроля заполнения пункта хранения закреплён на второй стенке этого лоткового спуска 7 выгрузки и выполнен с возможностью отражения излучения оптического датчика 64. Все пункты 8 выгрузки и пункт 10 отбраковки снабжены средством контроля заполнения пункта хранения для предотвращения дальнейшего заполнения пунктов 8 выгрузки.
[96] Со ссылкой на Фиг. 17, средство контроля разгрузки размещено после (по ходу движения цепи тележек 3) пунктов 8 выгрузки, выполнено с возможностью детектирования неотсортированного товара и наклонного положения кузова 15 тележки 3 (если после прохождения возвращающего модуля 6 кузов 15 тележки 3 не перешёл в транспортное положение), расположено за (по ходу движения цепи тележек 3) и включает в себя оптический датчик 66 и рефлектор 67. Оптический датчик 66 средства контроля разгрузки смонтирован на ставе 2 таким образом, что его луч проходит на некотором (максимально близком) расстоянии к поверхности, на которой может быть размещён товар, кузова 15 тележки 3, при условии, что тележка 3 находится в транспортном положении, и обращён в сторону рефлектора 67. Рефлектор 67 средства контроля разгрузки закреплён на ставе 2 с противоположной стороны от оптического датчика 66 средства контроля разгрузки и выполнен с возможностью отражения излучения оптического датчика 66 средства контроля разгрузки.
[97] Со ссылкой на Фиг. 4, 18, средство обнаружения прикреплённого товара выполнено с возможностью детектирования прикреплённого, например, посредством прилипания, примагничивания, к тележке 3 товара и выполнено с возможностью передачи сигнала об обнаружении такого товара в пульт управления сортировочной машины 1 и включает в себя упругий элемент 68, оптический датчик 69 и рефлектор. Упругий элемент 68 средства обнаружения прикреплённого товара соединён со ставом 2, выполнен с возможностью отгиба при взаимодействии с товаром и с возможностью пересечения при отгибе луча оптического датчика 69 средства обнаружения прикреплённого товара. Оптический датчик 69 средства обнаружения прикреплённого товара закреплён на ставе 2, обращён к рефлектору средства обнаружения прикреплённого товара, расположен с одной стороны от лоткового спуска 9 отбраковки. Рефлектор средства обнаружения прикреплённого товара закреплён на ставе 2, расположен с противоположной от оптического датчика 69 средства обнаружения прикреплённого товара стороне лоткового спуска 9 отбраковки и выполнен с возможностью отражения излучения от оптического датчика 69 средства обнаружения прикреплённого товара. На Фиг. 18 схематично представлено пояснение механизма работы средства обнаружения прикреплённого товара, где пунктиром обозначен упругий элемент 68 средства обнаружения прикреплённого товара в нормальном положении (не взаимодействующий с товаром), сплошной линией - упругий элемент 68' средства обнаружения прикреплённого товара (взаимодействующий с товаром), в отогнутом положении, стрелкой - направление движения цепи тележек 3.
[98] Средство контроля привода 39 каждого приводного модуля 4 выполнено с возможностью мониторинга нагрузки на приводах 39 и представляет собой частотный преобразователь, управляющий приводом 39, измеряет ток на приводе 39. Если фактические значения тока, подаваемого на привод 39 превышают допустимые, то средство контроля приводов 39 приводных модулей 4 формирует и передаёт сигнал о превышении тока в приводе 39 в пульт управления. Пульт управления принимает сигнал о превышении тока в приводе 39 от приводного модуля 4, формирует и передаёт управляющий сигнал об остановке привода 39 в приводные модули 4. При принятии упомянутого управляющего сигнала об остановке привода 39 приводные модули 4 прекратят свою работу произойдёт аварийная остановка цепи тележек 3. Это позволяет повысить отказоустойчивость сортировочной машины 1, а соответственно и её надёжность.
[99] Средство контроля работы пневмоцилиндров 54 представляют собой известные из уровня техники устройства, выполненные с возможностью контроля работы пневмоцилиндров 54 и может представлять собой два известных из уровня техники магнитных датчика, расположенных на корпусе пневмоцилиндра 54. Средство контроля работы пневмоцилиндров 54 выполнено с возможностью передачи сигнала в пульт управления для аварийной остановки цепи тележек 3. Такой алгоритм действий позволяет избежать повреждений элементов сортировочной машины 1, например, заклинивание колеса 22 тележки 3, загибание рычага 21 тележки 3 и локализовать неисправность. Наличие средства контроля работы пневмоцилиндров 54 повышает отказоустойчивость сортировочной машины 1, а соответственно и её надёжность.
[100] Предложенное техническое работает и его используют следующим образом.
[101] Размещают отсканированный товар в кузове 15 тележки 3. Со ссылкой на Фиг. 19, перемещают тележку 3 с товаром к заданному месту сброса (выгрузки) товара (на Фиг. 19-21 товар не показан), при этом позицией 70 обозначено направление движения колеса 22. В каждом месте сброса товара посредством наклоняющего модуля 5 переводят тележку 3 из транспортного положения, в котором кузов 15 тележки ориентирован горизонтально, в наклонное положение, в котором кузов 15 тележки 3 наклонён.
[102] Со ссылкой на Фиг. 20, в момент нахождения колеса 22 тележки 3 в улавливателе 56 направляющей 51 наклоняющего модуля 5, находящегося со стороны заданного пункта 8 выгрузки, передают управляющий сигнал на открытие заданного толкателя 53 наклоняющего модуля 5 от пульта управления в наклоняющий модуль 5, принимают управляющий сигнал на открытие заданного толкателя 53 наклоняющего модуля 5 в наклоняющем модуле 5, открывают (выдвигают) заданный толкатель 53 наклоняющего модуля 5 на заданное время (переводят переключатель 50 наклоняющего модуля 5 из закрытого положения в открытое положение) и перемещают посредством него рычаг 21 тележки 3 в сторону (вбок), при этом позицией 71 обозначено направление поворота толкателя 53 наклоняющего модуля 5. По прошествии заданного времени закрывают (задвигают) заданный толкатель 53 наклоняющего модуля 5 (переводят переключатель 50 наклоняющего модуля 5 из открытого положения в закрытое положение). Со ссылкой на Фиг. 21, перемещают колесо 22 тележки по нисходящей рампе 57 направляющей 51 наклоняющего модуля 5, опуская тем самым отклонённый рычаг 21 тележки 3 и поворачивая кузов 15 вокруг продольной оси тележки 3 в сторону заданного пункта 8 выгрузки (перемещаемый вниз рычаг 21 тележки 3 увлекает за собой кузов 15, тем самым поворачивая его), причём под действием силы тяжести товар перемещается в направлении 72 заданного пункта 8 разгрузки из кузова 15 на лотковый спуск 7 выгрузки и по нему в заданный пункт 8 выгрузки (см. Фиг. 24), при этом позицией 73 обозначено направление поворота кузова 15 тележки 3. Со ссылкой на Фиг. 22, в таком положении (кузов 15 тележки наклонён в заданную сторону, рычаг 21 тележки 3 опущен и отклонён в сторону) перемещают тележку 3 далее по колее става 2 до следующего наклоняющего модуля 5, в котором при взаимодействии колеса 22 опущенного рычага 21 и отбойника 58 этого наклоняющего модуля 5 происходит перемещение отклонённого и опущенного рычага 21 в направлении продольной оси тележки 3 на расстояние, позволяющее свободное перемещение колесу 22 без взаимодействия с нисходящими рампами 57 последующих наклоняющих модулей 5 (если такие есть), что предотвращает зажатие колеса 22 между нисходящей рампой 57 этого наклоняющего модуля 5 и ставом 2. Такое перемещение наклонённого рычага 21 в сторону позволяет предотвратить зажатие колеса 22 опущенного рычага 21 между нисходящей рампой 57 наклоняющего модуля 5 и элементом става 2 и, соответственно, заклинивание цепи тележек 3.
[103] Перед попаданием тележки 3 на возвращающий модуль 6 осуществляют контрольный наклон кузова каждой тележки 3 для сброса товара (если такой есть в тележке 3) в последний пункт 8 выгрузки посредством наклоняющего модуля 5, эта процедура выполняется для того, чтобы собрать весь товар, который не удалось правильно просканировать до попадания в сортировочную машину 1.
[104] Со ссылкой на Фиг. 23, далее перемещают тележку 3 до возвращающего модуля 6, на котором тележка 3 возвращается в транспортное положение.
[105] В случае если, товар не был отсортирован и(или) сброшен ни в один пункт 8 выгрузки, например, в результате неисправности тележки 3, товар присоединился к кузову 15 тележки 3, тележку 3 перемещают далее по колее става 2, а средство контроля разгрузки фиксирует неотсортированный товар, формирует и передаёт сигнал об обнаружении товара в пульт управления. Пульт управления принимает сигнал об обнаружении товара от средства контроля разгрузки, формирует и передаёт управляющий сигнал об остановке привода 39 в приводные модули 4. При принятии упомянутого управляющего сигнала об остановке привода 39 приводные модули 4 прекратят свою работу произойдёт аварийная остановка цепи тележек 3. Остановка цепи тележек позволяет предотвратить повреждение товара, что повышает надёжность сортировочной машины 1.
[106] Средство контроля разгрузки также фиксирует иное, отличное от транспортного положения, положение кузова 15 тележки 3, формирует и передаёт сигнал об этом ином, отличном от транспортного положения, положении кузова 15 тележки 3 в пульт управления. Пульт управления принимает сигнал об этом ином, отличном от транспортного положения, положении кузова 15 тележки 3 от средства контроля разгрузки формирует и передаёт управляющий сигнал об остановке привода 39 в приводные модули 4. При принятии упомянутого управляющего сигнала об остановке привода 39 приводные модули 4 прекратят свою работу, произойдёт аварийная остановка цепи тележек 3. Таким образом, средство контроля разгрузки позволяет предотвратить последующее повреждение механических узлов сортировочной машины 1, что повышает отказоустойчивость сортировочной машины 1, а соответственно и её надёжность.
[107] Если товар не был обнаружен средством контроля разгрузки, например, был мал, то он может быть сброшен в пункт 10 отбраковки, в момент переворачивания тележки 3.
[108] Со ссылкой на Фиг. 18, если товар не был сброшен в пункт 10 отбраковки, то он детектируется упругим элементом 68 средства обнаружения прикреплённого товара, когда тележка 3 переворачивается, при этом позицией 74 обозначено направление движения тележки 3. В случае наступления этого события средство обнаружения прикреплённого товара, формирует и передаёт сигнал об обнаружении прикреплённого товара в пульт управления. Пульт управления принимает сигнал об обнаружении прикреплённого товара от средства обнаружения прикреплённого товара, формирует и передаёт управляющий сигнал об остановке привода 39 в приводные модули 4. При принятии упомянутого управляющего сигнала об остановке привода 39 приводные модули 4 прекратят свою работу произойдёт аварийная остановка цепи тележек 3. Аварийная остановка предотвратит повреждение механических узлов сортировочной машины 1, что предотвратит повреждение товара и повысит её отказоустойчивость, а соответственно и её надёжность.
[109] Сравнения работы выталкивающего переключателя 75 предложенного технического решения (Фиг. 25) и втягивающего переключателя 76 наиболее близкого аналога (Фиг. 26) производилось по минимально возможному интервалу времени между началом перемещения переключателя в отклонённое состояние и началом его перемещения в исходное состояние. Для сравнения заданы следующие параметры: V = 1 м/с - скорость движения тележки, 1откр = 0.1 сек. - время перемещения выталкивающего переключателя 75 или втягивающего переключателя 76 между крайними положениями, L = 100 мм - длина зоны переключения, d = 50 мм - диаметр тестового колеса 77, w = 25 - ширина тестового колеса 77, а = 15° - угол открытия выталкивающего переключателя 75 или втягивающего переключателя 76.
[110] Со ссылкой на Фиг. 25, в данном случае выталкивающий переключатель 75 должен гарантированно находиться в переключённом положении, когда тестовое колесо 77 дошло до нисходящей рампы 78, при том перемещение выталкивающего переключателя 75 осуществляется с уже находящимся на нём тестовом колесе 77.
[111] Расстояние, проходимое тестовым колесом 77 за время перемещения выталкивающего переключателя 75:

[112] Введём координату Х, направленную против движения колеса 77 с 0 в точке, где фронт тестового колеса 77 попадает на нисходящую раму 78.
[113] Координата старта переключения (когда нужно начать переключение):

[114] Выталкивающий переключатель 75 окажется в отклонённом состоянии в момент захода фронта тестового колеса 77 на нисходящую раму 78, после чего центр тестового колеса 77 должен зайти на нисходящую рампу 78, чтобы на ней зафиксироваться и не выпасть, отсюда получаем координату начала обратного перемещения:
xfA= -d/2=-25 мм
[115] Вычисляем минимально допустимый рабочий интервал:  что соответствует времени:
что соответствует времени:
[116] Со ссылкой на Фиг. 26, в случае втягивающего переключателя 76 он должен гарантированно находиться в переключённом положении, когда отклоняемое колесо 77 дошло траектории, по которой происходит перемещение края втягивающего переключателя 76, при том обратное перемещение втягивающего переключателя 76 осуществляется с уже находящимся на нём колесе 77.
[117] Расстояние, проходимое колесом 77 за время перемещения втягивающего переключателя 76:

[118] Введём координату Х, направленную против движения тестового колеса 77 с 0 в точке, где фронт тестового колеса 77 попадает на нисходящую раму 79. Расстояние Д от фронта тестового колеса 77, касающегося траектории края втягивающего переключателя 76, до точки захода на втягивающий переключатель 76 (или «расстояние от края колеса 22 тележки 3 до крайней точки толкателя 53 переключателя наклоняющего модуля 5») при текущих параметрах равно 3.51 мм.
[119] Координата старта переключения (когда нужно начать переключение):

[120] Втягивающий переключатель 76 окажется в отклонённом состоянии с достаточным запасом до момента захода фронта колеса 77 на втягивающий переключатель 76, не столкнувшись с перемещающимся краем втягивающего переключателя 76, после чего центр колеса 77 должен зайти на втягивающий переключатель 76, чтобы на нём зафиксироваться и не выпасть, отсюда получаем координату начала обратного перемещения:
xfБ=L-d/2=75 мм
[121] Получаем минимально допустимый рабочий интервал:  , что
, что
соответствует времени 
[122] Заметим, что в случае выталкивающего переключателя 75 интервал меньше на величину расстояния Δ, которая в свою очередь зависит от угла а открытия и длины L зоны переключения.
[123] Таким образом, удаётся уменьшить минимально возможный интервал переключения при использовании выталкивающего переключателя 75 при данных вводных параметрах на величину
[124] Снижение интервала переключения посредством применения выталкивающего переключателя 50 позволяет избежать заклинивания колеса 22 и повреждения механизма, включающего в себя рычаг 21 тележки 3 и улавливатель 56 направляющей 51 наклоняющего модуля 5, в аварийном случае неполного открытия толкателя 53 переключателя 50 наклоняющего модуля 5. Таким образом, повышена отказоустойчивость сортировочной машины 1, а соответственно и её надёжность.
[125] На Фиг. 27 представлена представлен вывод зависимости расстояния Д от фронта тестового колеса 77 до точки захода на втягивающий переключатель 76 от вводных параметров (L и а) для схемы втягивающего переключателя.
[126] Длина r переключателя 76 получается:
[127] Полный ход l переключения будет равен:

[128] Ход l2 переключателя 76 до края колеса 77:

[129] Отсюда:


[130] Решение технической проблемы и достижение технического результата продемонстрированы выше на варианте выполнения предложенного технического решения. Специалисту в данной области техники очевидны иные варианты выполнения тех или иных признаков предложенного технического решения с применением известных из уровня техники материально-технических средств.
[131] В других вариантах выполнения предложенного технического решения конструкция става 2 может отличаться от раскрытого в вышеприведённом описании и представленной на чертежах. Например, конструкция става 2 может быть такой, что обеспечивает расположение траектории движения цепи тележек 3 в иной плоскости, например, горизонтальной, вертикальной, под иным углом или их сочетанием. Выполнение става 2, обеспечивающего расположение траектории движения тележек 3 в вертикальной плоскости (как в представленном выше варианте выполнения предложенного технического решения), предпочтительно, поскольку позволяет существенно сократить площадь, занимаемую предложенным техническим решением, и обеспечить свободный доступ с двух сторон, что позволяет увеличить количество пунктов хранения.
[132] В других вариантах выполнения предложенного технического решения лотковые спуски 7 выгрузки и(или) лотковый спуск 9 отбраковки могут представлять собой плоскую и(или) небольшим прогибом в центре наклонную предпочтительно гладкую поверхность, предпочтительно содержащую по меньшей мере один ограничительный борт по своему краю или по двум краям. Лотковый спуск 7 выгрузки и(или) лотковый спуск отбраковки может быть выполнен из по меньшей мере одного известного из уровня техники материала, например, из стали, фанеры или ламинированной древесно-стружечной плиты.
[133] В других вариантах выполнения предложенного технического решения по меньшей мере одна тележка 3 может включать в себя по меньшей мере один плавник 19, который может содержать по меньшей мере одно отверстие, и (или) по меньшей мере одна проставочная каретка 12 может содержать по меньшей мере один плавник 31, который может содержать по меньшей мере одно отверстие. В других вариантах выполнения предложенного технического решения плавник 19 тележки 3 и (или) по меньшей мере один плавник 31 по меньшей мере одной проставочной каретки 12 может быть выполнен без отверстий. Выполнение по меньшей мере одного отверстия предпочтительно, поскольку оно обеспечивает облегчение конструкции, снижает жёсткость детали, но повышает её пластичность, а также позволяет снизить нагрузку на колёса 35 колёсного блока 13, что повышает надёжность и отказоустойчивость предложенному техническому решению.
[134] В других вариантах выполнения предложенного технического решения кузов 15 тележки 3 может представлять собой известную из уровня техники платформу (с по меньшей мере одним бортом) или ящик, при этом поверхность на которой может быть размещён товар для его транспортировки к заданному месту сброса, предпочтительно выполнена скользящей для обеспечения плавной выгрузки товара. В других вариантах выполнения предложенного технического решения кузов 15 по меньшей мере одной тележки 3 может быть выполнен с возможностью поворота вокруг продольной и при необходимости вертикальной оси этой тележки 3.
[135] В других вариантах выполнения предложенного технического решения по меньшей мере одна тележка 3 может включать в себя по меньшей мере одно средство предотвращения самопроизвольного опрокидывания кузова тележки, представляющее собой по меньшей мере одно известное из уровня техники средство блокировки, например, механическое, магнитное и т.п., содержащее по меньший мере одно известное из уровня техники устройство, например, зацеп, упор, выступ, магнит, крепёжное изделие, стержень, отверстие. Средство предотвращения самопроизвольного опрокидывания кузова тележки блокирует перемещение кузова 15 тележки 3, что позволит предотвратить утерю товара, а значит и повысить надёжность предложенному техническому решению.
[136] В других вариантах выполнения предложенного технического решения оно может не содержать крыльев 23 тележки 3. Наличие по меньшей мере одного крыла 23 (или «защитного экрана 23) в по меньшей мере одной тележке 3 предпочтительно, поскольку оно препятствуют случайному попаданию во внутрь механизма предложенного технического решения (например, внутрь става 2) упавшего товара или иного постороннего предмета, чем обеспечивает повышение отказоустойчивости предложенному техническому решению, а соответственно и его надёжности.
[137] В других вариантах выполнения предложенного технического решения по меньшей мере одна тележка 3 может включать в себя по меньшей мере один рычаг 21, связанный с кузовом 15 тележки 3 (например, посредством шарнирного соединения), выполненный с возможностью вертикального перемещения, выполненный с возможностью перемещения (в частности, наклона) её кузова 15 при своём смещении, при этом наклоняющий модуль 5 может включать в себя по меньшей мере один переключатель 50, выполненный выталкивающим и содержащий по меньшей мере один толкатель 53, выполненный с возможностью смещения (перемещения вбок, смещения в сторону, отклонения) меньшей мере одного рычага 21 по меньшей мере одной тележки 3.
[138] В других вариантах выполнения предложенного технического решения цепь тележек 3 может содержать по меньшей мере одну проставочную каретку 12, расположенную между по меньшей мере двумя тележками 3, например, по одной проставочной каретке 12 между по меньшей мере одной парой тележек 3. В других вариантах выполнения предложенного технического решения цепь тележек 3 может не содержать проставочных кареток 12. Использование проставочных кареток 12 для соединения тележек 3 является предпочтительным, поскольку это позволяет уменьшить радиус поворота кольцевой траектории движения, не прибегая при этом к уменьшению размеров кузовов 15 тележек 3, а также минимизировать зазоры между кузовами 15 тележек 3. При минимизации зазоров между кузовами 15 тележек 3, снижается риск попадания товара или иного постороннего предмета мимо кузовов 15 тележек 3, что повышает точность сортировки. Кроме того, это позволяет повысить отказоустойчивость предложенного технического решения, а соответственно и его надёжность, за счёт снижения риска отказа оборудования из-за приведшего к заклиниванию товара или иного постороннего предмета. В других вариантах выполнения предложенного технического решения по меньшей мере одна проставочная каретка 12 может представлять собой устройство, предназначенное для соединения по меньшей мере двух тележек 3. В других вариантах выполнения предложенного технического решения по меньшей мере одна проставочная каретка 12 может содержать крышу 27. В других вариантах выполнения предложенного технического решения по меньшей мере одна проставочная каретка 12 может не содержать крышу 27 или крыша 27 может иметь иную форму, например, содержать по меньшей мере одну наклонную плоскую и (или) скруглённую поверхность.
[139] В других вариантах выполнения предложенного технического решения по меньшей мере один колёсный блок 13 может представлять собой отдельное устройство и (или) часть по меньшей мере одного другого устройства (например, тележки 3 и (или) проставочной каретки 12) и предназначен для обеспечения подвижного зацепления цепи тележек 3 с ставом 2. В других вариантах выполнения предложенного технического решения колёсный блок 13 может включать в себя по меньшей мере одно колесо 35 или по меньшей мере одну группу колёс, включающую в себя по меньшей мере одно колесо 35. В других вариантах выполнения предложенного технического решения оно может содержать по меньшей мере один колёсный блок 35, который может содержать три колеса 35, при этом два колеса 35 ориентированы вертикально, а третье колесо 35 ориентировано горизонтально и расположено между двумя вертикально ориентированными колёсами 35. Описанная ранее и представленная на чертежах конфигурация группы колёс 35 колёсного блока является предпочтительной, поскольку позволяет жёстко зафиксировать каретку 3 на рельсах 11, что уменьшает возможные биения, снижает износ узлов и тем самым повышает отказоустойчивость предложенного технического решения, а соответственно и его надёжность. В такой конфигурации группы колёс 35 колёсного блока 13 два колеса 35 ориентированы вертикально, предпочтительно расположены в одной плоскости и на заданном расстоянии друг от друга для расположения между ними рельса 11, что позволяет колёсному блоку 13 постоянно опираться на одно из колёс 35 при перемещении в нормальном и перевёрнутом положении. Третье колесо 35 колёсного блока 13 предпочтительно расположено между вертикально ориентированными колёсами 35, ориентировано горизонтально, выполнено с возможностью перемещения по боковой поверхности рельса 11 и предотвращает смещение вбок колёсного блока 13 относительно рельс 11. Таким образом, предложенная предпочтительная конфигурация группы колёс 35 колёсного блока 13 повышает отказоустойчивость предложенного технического решения, а соответственно и его надёжность. Очевидно, что колёсный блок 13 может включать в себя по меньшей мере одну такую группу колёс 35.
[140] В других вариантах выполнения предложенного технического решения по меньшей мере одна тележка, по меньшей мере одна проставочная каретка 12 и по меньшей мере один колёсный блок 13 могут быть соединены посредством по меньшей мере одной известной из уровня техники сборочной операции и(или) с использованием по меньшей мере одного известного из уровня техники устройства.
[141] В других вариантах выполнения предложенного технического решения приводной модуль 4 может включать в себя по меньшей мере один упругий элемент 43 выполненный с возможностью обеспечения прижатия множества фрикционных роликов 49 к плавнику 19 тележки 3 или плавнику 31 проставочной каретки 12. Количество и расположение упругих элементов 43 задают таким образом, чтобы обеспечить постоянное прижатие множества фрикционных роликов 49 к плавнику 19 тележки 3 или плавнику 31 проставочной каретки 12 для обеспечения отказоустойчивости предложенного технического решения, а соответственно и его надёжности. Например, для достижения этих целей может быть использовано по меньшей мере два упругих элемента 43, расположенных в концевых частях приводного модуля 4 (как в описанном ранее и представленном на чертежах варианте выполнения предложенного технического решения). В других вариантах выполнения предложенного технического решения приводной модуль 4 может включать в себя по меньшей мере два упругих элемента 43.
[142] В других вариантах выполнения предложенного технического решения по меньшей мере один пункт хранения (пункт 8 выгрузки или пункт 10 отбраковки) может представлять собой известное из уровня техники место хранения, в том числе временного, товара (например, мешок, пакет, кузов другой тележки, коробку, лоток или иную тару для хранения или транспортировки товаров, грузов, упаковку) или часть другого устройства, например, нижнюю часть, соответствующего лоткового спуска (лоткового спуска 7 выгрузки или лоткового спуска 9 отбраковки).
[143] В других вариантах выполнения предложенного технического решения колея става 2 может включать в себя по меньшей мере одну известную из уровня техники направляющую, например, выполненную в виде рельса 11, паза.
[144] В других вариантах выполнения предложенного технического решения по меньшей мере один приводной модуль 4 может включать в себя в себя по меньшей мере две пары фрикционных роликов 49.
[145] В других вариантах выполнения предложенного технического решения оно может включать в себя по меньшей мере один приводной модуль 4, который может содержать по меньшей мере один привод 39, представляющий собой известный из уровня техники привод, и ремённую передачу 40, включающую в себя известные из уровня техники шкивы (например, цельные, составные, гладкие, зубчатые) и по меньшей мере один известный из уровня техники ремень. Очевидно также, что приводной модуль 4 может включать в себя по меньшей мере одну известную из уровня техники передачу, например, механическую, в частности, зубчатую, содержащую по меньшей мере два зубчатых колеса 48, которые могут представлять собой известные из уровня техники зубчатые колеса, реечную, зубчато-винтовую. В описанном выше варианте осуществления предложенного технического решения используется пять зубчатых колёс 48: по одному для каждого фрикционного ролика 49 и одно раздаточное для обеспечения поворота (кручения, вращения) фрикционных роликов 49 в одну сторону. Иными словами, количество зубчатых колёс может определяться количеством фрикционных роликов 49 и количеством, необходимым для поворота (кручения, вращения) их в одну сторону. В других вариантах выполнения предложенного технического решения по меньшей мере один приводной модуль 4 может включать в себя в себя пять зубчатых колёс 48 и (или) зубчатые колёса 48 для синхронизации вращения фрикционных роликов 49. В качестве привода 39 может быть использован асинхронный мотор-редуктор, управляемый частотным преобразователем, электродвигатель постоянного тока и проч. Использование в качестве привода 39 мотор-редуктора, управляемого частотным преобразователем, предпочтительно, поскольку по сравнению, например, с электродвигателем постоянного тока, он обладает более простой конструкцией, требует минимального технического обслуживания поскольку отсутствуют щётки, которые требуют замены и производят пыль, засоряющих сам двигатель, для формирования вращающегося поля не требуются дополнительные элементы и преобразования, поскольку в стандартной трёхфазной системе питания фазы сдвинуты на 120°, не прихотлив к состоянию окружающей среды, при работе отсутствуют искры. Поэтому использование в качестве привода 39 мотор-редуктора, управляемого частотным преобразователем, повышает отказоустойчивость предложенного технического решения, а соответственно и его надёжность.
[146] Тем не менее, описанная в варианте выполнения предложенного технического решения конструкция приводного модуля 4 является предпочтительной, поскольку:
[147] - используется один привод 39, что упрощает конструкцию приводного модуля 4 и предложенного технического решения в целом, а значит повышает отказоустойчивость, а соответственно и его надёжность,
[148] - результаты опытов показали, что синхронизация вращения фрикционных роликов 49, происходящая механически при помощи зубчатых колёс 48, является более надёжной, что повышает отказоустойчивость предложенного технического решения, а соответственно и его надёжность,
[149] - использование по меньшей мере двух пар фрикционных роликов 49, а не одной как в наиболее близком аналоге, позволило увеличить передаваемое усилие от приводного модуля 4 к цепи тележек 3 и добиться непрерывности передачи этого усилия, так как в любой момент времени как минимум одна пара фрикционных роликов 49 находится в сцеплении с цепью конвейерных тележек 3, что повысило отказоустойчивость предложенного технического решения, а соответственно и его надёжность.
[150] В других вариантах выполнения предложенного технического решения конструкция по меньшей мере одного элемента по меньшей мере одного наклоняющего модуля 5 или его в целом, а также его расположение в ставе 2, может быть отличной от описанной выше и представленной на чертежах.
[151] В других вариантах выполнения предложенного технического решения по меньшей мере один наклоняющий модуль 5 может включать в себя по меньшей мере один переключатель 50. В других вариантах выполнения предложенного технического решения по меньшей мере один переключатель 50 наклоняющего модуля 5 может включать в себя по меньшей мере один толкатель 53 и по меньшей мере одно средство перемещения толкателя 53, содержащее по меньшей мере одно известное из уровня техники средство, выполненное с возможностью перемещения толкателя 53. В других вариантах выполнения предложенного технического решения по меньшей мере один наклоняющий модуль 5 может включать в себя по меньшей мере один пневмоцилиндр 54. Практическим путём было установлено, что использование по меньшей мере одного пневмоцилиндра 54 позволило демпфировать удары за счёт сжимаемости воздуха и повысить отказоустойчивость, а соответственно и его надёжность, переключателя 50 и предложенного технического решения в целом. Кроме того, пневмоцилиндр 54 может включать в себя предохранительный клапан, что предотвращает его перегрузку и повышает надёжность и отказоустойчивость предложенного технического решения в целом. В других вариантах выполнения предложенного технического решения по меньшей мере один толкатель 53 переключателя 50 может быть выполнен в виде детали или сборочной единицы, плоским или объёмным. Выполнение по меньшей мере одного толкателя 53 в виде плоской пластины (как в описанном ранее варианте выполнения предложенного технического решения и представленного на чертежах) предпочтительно, т.к. позволило упростить конструкцию переключателя 50 и снизить требования к точности срабатывания, что повысило отказоустойчивость предложенного технического решения, а соответственно и его надёжность.
[152] В других вариантах выполнения предложенного технического решения по меньшей мере одна направляющая 51 по меньшей мере одного наклоняющего модуля 5 может не включать в себя улавливатель. Однако наличие по меньшей мере одного улавливателя 56 в наклоняющем модуле 5 предпочтительно, поскольку он обеспечивает корректировку траектории перемещения колеса 22 тележки 3 для точного попадания его в нисходящую рампу 57, что повышает отказоустойчивость предложенного технического решения, а соответственно и его надёжность. Непопадание колеса 22 тележки 3 в нисходящую рампу 57 может привести к его упиранию в другие элементы конструкции предложенного технического решения, что может предотвратить его свободное перемещение и привести к повреждению тележки 3, нисходящей рампы 57 или иного элемента конструкции предложенного технического решения. Непопадание колеса 22 тележки 3 в нисходящую рампу 57 может привести к тому, что кузов 15 не наклонится в заданную сторону, а товар не выгрузится. По меньшей мере один улавливатель 56 наклоняющего модуля 5 может представлять собой деталь, сборочную единицу, участок (например, паз) другого устройства или по меньшей мере двух устройств, расположенных на заданном расстоянии друг от друга, и может быть выполнен с возможностью обеспечения перемещения (корректировки траектории перемещения) другого устройства (например, колеса и (или) другого элемента тележки 3), например, в нисходящую рампу 57 наклоняющего модуля 5.
[153] В других вариантах выполнения предложенного технического решения по меньшей мере одна нисходящая рампа 57 по меньшей мере одного наклоняющего модуля 5 может быть выполнена в виде детали, сборочной единицы, участка (например, паза) другого устройства или по меньшей мере двух устройств, расположенных на заданном расстоянии друг от друга, может быть выполнена прямолинейной или криволинейной (например, радиусно скруглённой) и может быть выполнена с возможностью направления другого устройства (например, колеса 22 и (или) другого элемента тележки 3) по заданной траектории.
[154] В других вариантах выполнения предложенного технического решения по меньшей мере один наклоняющий модуль 5 может включать в себя по меньшей мере один отбойник 58, который может представлять собой деталь, сборочную единицу, часть по меньшей мере одного другого устройства или по меньшей мере двух устройств, расположенных на заданном расстоянии друг от друга. По меньшей мере один отбойник 58 может представлять собой известное из уровня техники изделие проката, например, пластину. По меньшей мере один отбойник 58 может быть расположен под по меньшей мере одной нисходящей рампой.
[155] В других вариантах выполнения предложенного технического решения возвращающий модуль 6 может включать в себя по меньшей мере одну восходящую рампу 59, которая может представлять собой деталь, сборочную единицу, участок устройства (например, паз) или по меньшей мере двух устройств, расположенных на заданном расстоянии друг от друга, и выполненную с возможностью обеспечения перемещения другого устройства (например, колеса 22 и(или) другого элемента тележки 3) по заданной траектории. В других вариантах выполнения предложенного технического решения возвращающий модуль 6 может включать в себя по меньшей мере две восходящие рампы 59, которые могут быть смонтированы со смещением друг относительно друга на ставе 2. Количество восходящих рамп 59 возвращающего модуля 6 может определяться расположением пунктов 8 выгрузки: если пункты 8 выгрузки с двух сторон става 2 - возвращающий модуль 6 может содержать две восходящие рампы 59, с одной стороны - возвращающий модуль 6 может содержать одну восходящую рампу 59. По меньшей мере одна восходящая рампа 59 возвращающего модуля 6 может быть выполнена прямолинейной или криволинейной (например, радиусно скруглённой). Выполнение восходящей рампы 59 возвращающего модуля 6 прямолинейной предпочтительно, поскольку это позволило упростить процесс изготовления возвращающего модуля 6 и настройку его положения во время монтажа. Взведение колёс 22 по очереди позволяет избежать прикладывания усилия одновременно к двум колёсам 22 рычагов 21, что исключает возможность их повреждения и снижает требования к точности настройки возвращающего модуля 6. Как следствие, повышается отказоустойчивость узла, а соответственно и его надёжность, и всего предложенного технического решения в целом. Возвращающий модуль 6 может быть выполнен с возможностью взаимодействия с по меньшей мере одной тележкой 3 для перевода её кузова 15 в положение для транспортировки товара, при этом упомянутое взаимодействие может происходить, например, через по меньшей мере одно колесо 22, закреплённое на соответствующем рычаге 21, с соответствующем рычагом 21, в результате которого рычаг 21 перемещается вверх и толкает кузов 15, переводя его таким образом в транспортное положение.
[156] В других вариантах выполнения предложенного технического решения система контроля может включать в себя по меньшей мере одно средство детектирования первой тележки 3, по меньшей мере одно средство контроля перемещения тележек 3, по меньшей мере одно средство контроля заполнения по меньшей мере одного пункта хранения, по меньшей мере одно средство контроля разгрузки, по меньшей мере одно средство обнаружения прикреплённого товара, по меньшей мере одно средство контроля по меньшей мере одного привода 39 по меньшей мере одного приводного модуля 4 и(или) по меньшей мере одно средство контроля работы по меньшей мере одного пневмоцилиндра 54 по меньшей мере одного наклоняющего модуля. В других вариантах выполнения предложенного технического решения система контроля может отсутствовать.
[157] В других вариантах выполнения предложенного технического решения по меньшей мере одно средство детектирования первой тележки 3, по меньшей мере одно средство контроля перемещения тележек 3, по меньшей мере одно средство контроля заполнения по меньшей мере одного пункта хранения, по меньшей мере одно средство контроля разгрузки, по меньшей мере одно средство обнаружения прикреплённого товара, по меньшей мере одно средство контроля по меньшей мере одного привода 39 по меньшей мере одного приводного модуля 4 и по меньшей мере одно средство контроля работы по меньшей мере одного пневмоцилиндра 54 может включать в себя известный из уровня техники датчик, например, контактный, бесконтактный, оптический, магнитный, индуктивный, механический, звука.
[158] В других вариантах выполнения предложенного технического решения средство детектирования первой тележки 3 может представлять собой известное из уровня техники средство (контактное и(или) бесконтактное), выполненное с возможностью идентифицирования заданного объекта и контроля его перемещения и может включать в себя по меньшей мере одно известное из уровня техники устройство, например, источник излучения, приёмник излучения, причём излучение может быть электромагнитным, звуковым. Средство детектирования первой тележки 3 обеспечивает защиту от накопленной ошибки в случае некорректной работы средства контроля перемещения тележек 3. Если положение первой тележки 3 не будет циклически обновляться, то со временем реальное положение тележек 3 будет отличаться от рассчитанного программой управления. Это приведёт к появлению упомянутой накопленной ошибке, во времени срабатывания переключателей 50, содержащей множество небольших ошибок в положении тележек 3. Устранение этой ошибки, обеспечиваемое средством детектирования первой тележки 3, позволит повысить отказоустойчивость предложенному техническому решению, а соответственно и его надёжность.
[159] В других вариантах выполнения предложенного технического решения средство контроля перемещения тележек 3 может представлять собой известное из уровня техники средство (контактное и(или) бесконтактное), и может включать в себя по меньшей мере одно известное из уровня техники устройство, например, источник излучения, приёмник излучения, причём излучение может быть электромагнитным, звуковым. Средство контроля перемещения тележек 3 используют для отслеживания моментальной скорости и для повышения качества обратной связи приводного модуля 4. В целом средство контроля перемещения тележек 3 используется для того, чтобы считать тележки 3, что позволяет более точно определять момент включения переключателя 50, что повышает отказоустойчивость предложенного технического решения, а соответственно и его надёжность.
[160] В других вариантах выполнения предложенного технического решения по меньшей мере одно средство контроля по меньшей мере одного привода 39 по меньшей мере одного приводного модуля 4 может представлять собой известное из уровня техники устройство, выполненное с возможностью измерения силы тока.
[161] В других вариантах выполнения предложенного технического решения оно может содержать по меньшей мере один наклоняющий модуль 5, включающий в себя по меньшей мере один переключатель 50, и пульт управления, выполненный с возможностью взаимодействия с 5 для перевода его по меньшей мере одного переключателя 50 из закрытого положения в открытое положение и из открытого положения в закрытое положение.
[162] Предложенное техническое решение может быть использовано для сортировки различных товаров, например, коробов, пакетов, конвертов и иных объектов иной формы.
[163] Позиции на чертежах:
1 -сортировочная машина
2 - рама,
3 - тележка,
4 - приводной модуль,
5 - наклоняющий модуль,
6 - возвращающий модуль,
7 - лотковый спуск выгрузки,
8 - пункт выгрузки,
9 - лотковый спуск отбраковки,
10 - пункт отбраковки,
11 - рельс,
12 - проставочная каретка,
13 - колёсный блок,
14 - рама тележки 3,
15 - кузов тележки 3,
16 - основание тележки 3,
17 - стойка тележки 3,
18 - сцепка тележки 3,
19 - плавник тележки 3,
20 - пружина растяжения тележки 3,
21 - рычаг тележки 3,
22 - колесо тележки 3,
23 - крыло тележки 3,
24 - отверстие крыла 23 тележки 3,
25 - зацепы тележки 3,
26 - рама проставочной каретки 12,
27 - крыша проставочной каретки 12,
28 - основание проставочной каретки 12,
29 - сцепка проставочной каретки 12,
30 - стойка проставочной каретки 12,
31 - плавник проставочной каретки 12,
32 - ребро проставочной каретки 12,
33 - рама колёсного блока 13,
34 - средство крепления колёсного блока 13,
35 - колесо колёсного блока 13,
36 - полка рамы 33 колёсного блока 13,
37 - ножка рамы 33 колёсного блока 13,
38 - проушина средства 34 крепления колёсного блока 13,
39 - привод приводного модуля 4,
40 - ремённая передача,
41 - ведущий приводной блок приводного модуля 4,
42 - ведомый приводной блок приводного модуля 4,
43 - упругий элемент приводного модуля 4,
44 - ведущий шкив ремённой передачи 40,
45 - ведомый шкив ремённой передачи 40,
46 - ремень ремённой передачи 40,
47 - стержень приводного блока 41, 42,
48 - зубчатое колесо приводного блока 41, 42,
49 - фрикционный ролик приводного блока 41, 42,
50 - переключатель наклоняющего модуля 5,
51 - направляющая наклоняющего модуля 5,
52 - корпус переключателя 50 наклоняющего модуля 5,
53 - толкатель переключателя 50 наклоняющего модуля 5,
54 - пневмоцилиндр средства перемещения толкателя 53 переключателя 50 наклоняющего модуля 5,
55 - опорный элемент направляющей 51 наклоняющего модуля 5,
56 - улавливатель направляющей 51 наклоняющего модуля 5,
57 - нисходящая рампа направляющей 51 наклоняющего модуля 5,
58 - отбойник направляющей 51 наклоняющего модуля 5,
59 - восходящая рампа возвращающего модуля 6,
60 - оптический датчик средства детектирования первой тележки 3,
61 - рефлектор средства детектирования первой тележки 3,
62 - оптический датчик средства контроля перемещения тележек 3,
63 - рефлектор средства контроля перемещения тележек 3,
64 - оптический датчик средства контроля заполнения пункта хранения,
65 - рефлектор датчика переполнения,
66 - оптический датчик средства контроля разгрузки,
67 - рефлектор средства контроля разгрузки,
68 - упругий элемент средства обнаружения прикреплённого товара,
69 - датчик отгиба средства обнаружения прикреплённого товара,
70 - направление движения колеса 22 тележки 3,
71 - направление поворота толкателя 53 переключателя 50 наклоняющего модуля 5,
72 - направление движения товара,
73 - направление поворота кузова 15 тележки 3,
74 - направление движения тележки 3,
75 - выталкивающий переключатель,
76 - втягивающий переключатель,
77 - отклоняемое колесо,
78 - нисходящая рампа,
79 - нисходящая рампа.
| название | год | авторы | номер документа |
|---|---|---|---|
| СОРТИРОВОЧНАЯ СИСТЕМА И СПОСОБ СОРТИРОВКИ ОБЪЕКТОВ | 2020 |
|
RU2743623C1 |
| Стенд для проведения испытаний железнодорожных колёс и рельсов на контактно-усталостные повреждения и шумоизлучение в условиях, приближенных к эксплуатационным | 2024 |
|
RU2828175C1 |
| Передвижная инвалидная поддержка и подспорье | 2024 |
|
RU2836934C1 |
| СИСТЕМА ТОРМОЗНОГО ОБОРУДОВАНИЯ РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2024 |
|
RU2825908C1 |
| ЗАГРАЖДАЮЩЕЕ УСТРОЙСТВО БАЛОЧНОЕ РЫЧАЖНОЕ ВЕСОВОЕ (ЗУБР ВЕСОВОЙ) | 2021 |
|
RU2757509C1 |
| Роликовый аппарат для ортопедов, нянек, инвалидов | 2024 |
|
RU2836933C1 |
| ПРОИЗВОДСТВЕННАЯ ЛИНИЯ ДЛЯ ИЗГОТОВЛЕНИЯ АВТОМОБИЛЕЙ | 2009 |
|
RU2489299C2 |
| Стояночный тормоз железнодорожного вагона | 2017 |
|
RU2659342C1 |
| Тормозная рычажная передача четырёхосной тележки рельсового транспортного средства | 2023 |
|
RU2814294C1 |
| Высокомобильный транспортный робот для перемещения палетированных грузов | 2022 |
|
RU2798652C1 |
Предложенное техническое решение относится к сортировочным машинам, предназначенным для перемещения и разгрузки товаров в заданные места и которые включают в себя сбрасывающие (наклоняющие) тележки. Технический результат заключается в повышении надёжности сортировочной машины. Технический результат достигается за счёт того, что сортировочная машина включает в себя: став, цепь тележек, выполненную с возможностью перемещения по ставу, включающую в себя множество тележек, каждая из которых содержит кузов, выполненный с возможностью нахождения в положении для сброса товара, в котором он наклонён в заданную сторону, и в положении для транспортировки товара, по меньшей мере один приводной модуль, соединённый со ставом и выполненный с возможностью перемещения цепи тележек, по меньшей мере один наклоняющий модуль, соединённый со ставом, выполненный с возможностью взаимодействия с соответствующей тележкой для перевода её кузова в положение для сброса товара и содержащий по меньшей мере один переключатель, выполненный выталкивающим, возвращающий модуль, соединённый со ставом и выполненный с возможностью взаимодействия с соответствующей тележкой для перевода её кузова в положение для транспортировки товара. 26 з.п. ф-лы, 27 ил.
1. Сортировочная машина, включающая в себя:
- став,
- цепь тележек, выполненную с возможностью перемещения по ставу, включающую в себя множество тележек, каждая из которых содержит кузов, выполненный с возможностью нахождения в положении для сброса товара, в котором он наклонён в заданную сторону, и в положении для транспортировки товара,
- по меньшей мере один приводной модуль, соединённый со ставом и выполненный с возможностью перемещения цепи тележек,
- по меньшей мере один наклоняющий модуль, соединённый со ставом, выполненный с возможностью взаимодействия с соответствующей тележкой для перевода её кузова в положение для сброса товара и содержащий по меньшей мере один переключатель, выполненный выталкивающим,
- возвращающий модуль, соединённый со ставом, выполненный с возможностью взаимодействия с соответствующей тележкой для перевода её кузова в положение для транспортировки товара и включающий в себя по меньшей мере две восходящие рампы, смонтированные со смещением друг относительно друга на ставе.
2. Сортировочная машина по п. 1, отличающаяся тем, что по меньшей мере один переключатель наклоняющего модуля выполнен с возможностью нахождения в открытом положении и закрытом положении, а сортировочная машина содержит пульт управления, выполненный с возможностью взаимодействия с по меньшей мере одним наклоняющим модулем для перевода его по меньшей мере одного переключателя из закрытого положения в открытое положение и из открытого положения в закрытое положение.
3. Сортировочная машина по п. 1, отличающаяся тем, что по меньшей мере одна тележка включает в себя по меньшей мере одно крыло.
4. Сортировочная машина по п. 1, отличающаяся тем, что по меньшей мере одна тележка включает в себя плавник с по меньшей мере одним отверстием.
5. Сортировочная машина по п. 1, отличающаяся тем, что по меньшей мере одна тележка включает в себя средство предотвращения самопроизвольного опрокидывания кузова.
6. Сортировочная машина по п. 1, отличающаяся тем, что цепь тележек включает в себя по меньшей мере одну проставочную каретку, расположенную между по меньшей мере двумя тележками.
7. Сортировочная машина по п. 6, отличающаяся тем, что по меньшей мере одна проставочная каретка включает в себя крышу.
8. Сортировочная машина по п. 6, отличающаяся тем, что по меньшей мере одна проставочная каретка включает в себя плавник с по меньшей мере одним отверстием.
9. Сортировочная машина по п. 1, отличающаяся тем, что по меньшей мере один наклоняющий модуль включает в себя по меньшей мере один пневмоцилиндр.
10. Сортировочная машина по пп. 1, 9, отличающаяся тем, что она содержит по меньшей мере одно средство контроля работы по меньшей мере одного пневмоцилиндра по меньшей мере одного наклоняющего модуля.
11. Сортировочная машина по п. 1, отличающаяся тем, что по меньшей мере один наклоняющий модуль включает в себя по меньшей мере один толкатель, выполненный в виде пластины.
12. Сортировочная машина по п. 1, отличающаяся тем, что по меньшей мере один наклоняющий модуль включает в себя по меньшей мере одну направляющую, включающую в себя по меньшей мере одну нисходящую рампу и по меньшей мере один улавливатель.
13. Сортировочная машина по п. 1, отличающаяся тем, что по меньшей мере один наклоняющий модуль включает в себя по меньшей мере один отбойник.
14. Сортировочная машина по пп. 12, 13, отличающаяся тем, что по меньшей мере один отбойник расположен под по меньшей мере одной нисходящей рампой.
15. Сортировочная машина по п. 1, отличающаяся тем, что по меньшей мере один приводной модуль включает в себя по меньшей мере два зубчатых колеса.
16. Сортировочная машина по п. 15, отличающаяся тем, что по меньшей мере один приводной модуль включает в себя пять зубчатых колёс.
17. Сортировочная машина по п. 1, отличающаяся тем, что по меньшей мере один приводной модуль включает в себя по меньшей мере две пары фрикционных роликов.
18. Сортировочная машина по п. 17, отличающаяся тем, что по меньшей мере один приводной модуль включает в себя по меньшей мере два упругих элемента.
19. Сортировочная машина по п. 17, отличающаяся тем, что по меньшей мере один приводной модуль включает в себя зубчатые колёса для синхронизации вращения фрикционных роликов.
20. Сортировочная машина по п. 1 отличающаяся тем, что по меньшей мере один приводной модуль включает в себя по меньшей мере один привод, представляющий собой мотор-редуктор.
21. Сортировочная машина по п. 1, отличающаяся тем, что она содержит по меньшей мере одно средство детектирования первой тележки.
22. Сортировочная машина по п. 1, отличающаяся тем, что она содержит по меньшей мере одно средство контроля перемещения тележек.
23. Сортировочная машина по п. 1, отличающаяся тем, что она содержит по меньшей мере одно средство контроля заполнения по меньшей мере одного пункта хранения.
24. Сортировочная машина по п. 1, отличающаяся тем, что она содержит по меньшей мере одно средство контроля разгрузки.
25. Сортировочная машина по п. 1, отличающаяся тем, что она содержит по меньшей мере одно средство обнаружения прикреплённого товара.
26. Сортировочная машина по п. 1, отличающаяся тем, что она содержит по меньшей мере один колёсный блок, включающий в себя три колеса, при этом два колеса ориентированы вертикально, а третье колесо ориентировано горизонтально и расположено между двумя вертикально ориентированными колёсами.
27. Сортировочная машина по п. 1, отличающаяся тем, что по меньшей мере один приводной модуль содержит по меньшей мере один привод, а сортировочная машина включает в себя по меньшей мере одно средство контроля по меньшей мере одного привода по меньшей мере одного приводного модуля.
| US 20210387235 A1, 16.12.2021 | |||
| US 5632589 A, 27.05.1997 | |||
| CN 203184247 U, 11.09.2013 | |||
| US 2021047133 A1, 18.02.2021 | |||
| CN 111992507 A, 27.11.2020 | |||
| US 2023001452 A1, 05.01.2023. |

