U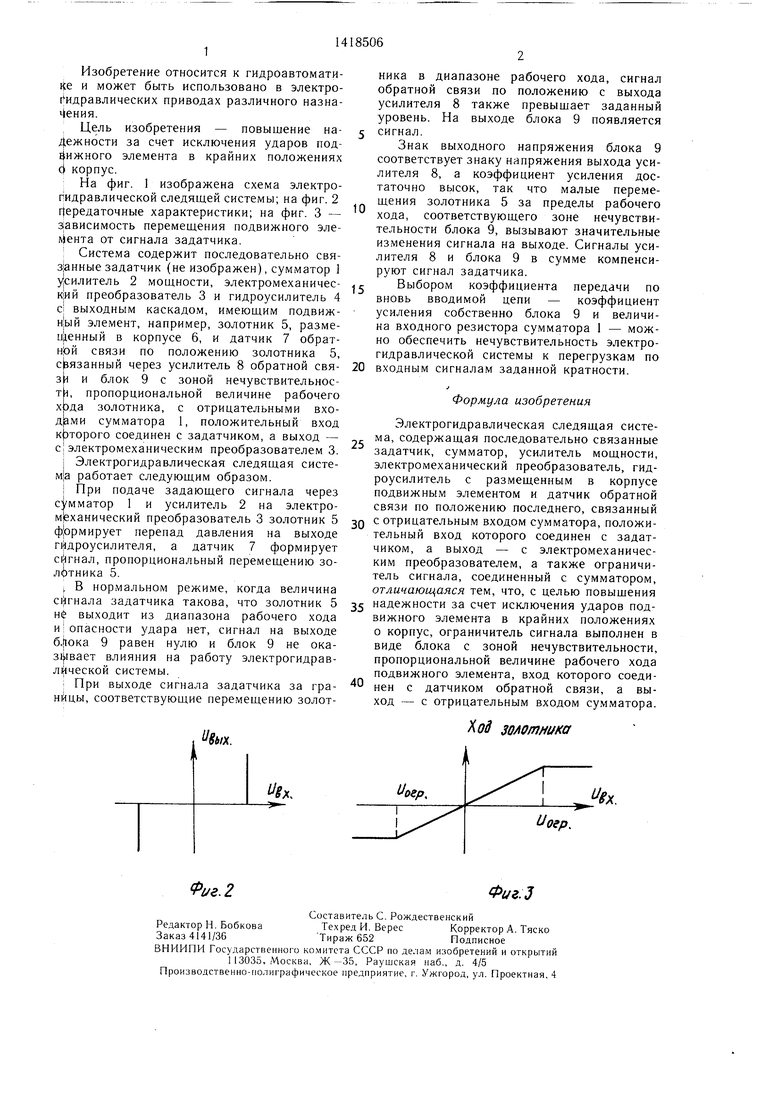
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| Вибрационный источник сейсмических сигналов | 1986 |
|
SU1543361A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Электрогидравлическая следящая система | 1987 |
|
SU1476207A1 |
| ЭЛЕКТРОГИДРЛВЯИЧЕСКЛЯ СЛЕДЯЩАЯ СИСТЕМА | 1976 |
|
SU826100A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| МНОГОКАНАЛЬНЫЙ РЕЗЕРВИРОВАННЫЙ СЕРВОПРИВОД | 1969 |
|
SU244837A1 |
| Электрогидравлическая следящаяСиСТЕМА | 1979 |
|
SU849134A1 |
Изобретение позволяет повысить надежность системы за счет исключения ударов подвижного элемента в крайних положениях о корпус. Задатчик, сумматор 1, J / усилитель 2 мощности, электромеханический преобразователь 3 и гидроусилитель 4 с выходным каскадом соединены последовательно. Датчик 7 обратной связи но положению золотника 5 связан че|н усилитель 8 и блок 9 с зоной нечувствительности, пропорциональной ве.чичнно рабочего хода золотника, с отрицате. 1ьн1 1мн входами сумматора 1, положит, вход к-рого соединен с задатчиком, а выход с преобразователем 3. Выбором коэф. передачи по вновь вводимой цепикоэф. усиления собственно блока 9 и величина входного резистора сумматора 1 - можно o6t4 - печить нечувствительность электрогидравли- ческой системы к перегрузкам но входным сигналам заданной кратносгп. 3 и.ч. о & (Л 00 ел о О5
Изобретение относится к гидроавтоматике и может быть использовано в электро- г идравлических приводах различного назна- 1|ения.
Цель изобретения - повышение надежности за счет исключения ударов под- 4ижного элемента в крайних положениях с1 корпус.
; На фиг. 1 изображена схема электро- пидравлической следящей системы; на фиг. 2 г|ередаточные характеристики; на фиг. 3 - з|ависимость перемещения подвижного эле- от сигнала задатчика.
Система содержит последовательно свя- з|анные задатчик (не изображен), сумматор 1 у|силитель 2 мощности, электромеханичес- ..г К|ий преобразователь 3 и гидроусилитель 4 с| выходным каскадом, имеющим подвиж- н|ый элемент, например, золотник 5, разме- п енный в корпусе 6, и датчик 7 обрат10
ника в диапазоне рабочего хода, сигнал обратной связи по положению с выхода усилителя 8 также превышает заданный уровень. На выходе блока 9 появляется сигнал.
Знак выходного напряжения блока 9 соответствует знаку напряжения выхода усилителя 8, а коэффициент усиления достаточно высок, так что малые перемещения золотника 5 за пределы рабочего хода, соответствующего зоне нечувствительности блока 9, вызывают значительные изменения сигнала на выходе. Сигналы усилителя 8 и блока 9 в сумме компенсируют сигнал задатчика.
Выбором коэффициента передачи по вновь вводимой цепи - коэффициент усиления собственно блока 9 и величина входного резистора сумматора 1 - можно обеспечить нечувствительность электрогидравлической системы к перегрузкам по
нОй связи по положению золотника 5,
связанный через усилитель 8 обратной сея- 20 входным сигналам заданной кратности.
зй и блок 9 с зоной нечувствительносФормула изобретения Электрогидравлическая следящая систетй, пропорциональной величине рабочего
хЬда золотника, с отрицательными входрми сумматора 1, положительный вход
к|эторого соединен с задатчиком, а выход - . ма, содержащая последовательно связанные
с| электромеханическим преобразователем 3.задатчик, сумматор, усилитель мощности,
i Электрогидравлическая следящая систе- м|а работает следующим образом.
При подаче задающего сигнала через
сумматор I и усилитель 2 на электроэлектромеханический преобразователь, гидроусилитель с размещенным в корпусе подвижным элементом и датчик обратной связи по положению последнего, связанный механический преобразователь 3 золотник 5 о с отрицательным входом сумматора, положи- ф ормирует перепад давления на выходетельный вход которого соединен с задатгидроусилителя, а датчик 7 формируетчиком, а выход - с электромеханичессйгнал, пропорциональный перемещению зо-ким преобразователем, а также ограничилЬтчика 5.тель сигнала, соединенный с сумматором,
; В нормальном режиме, когда величинаотличающаяся тем, что, с целью повышения
С1;1гнала задатчика такова, что золотник 5 35 надежности за счет исключения ударов под- нё выходит из диапазона рабочего ходавижного элемента в крайних положениях
о корпус, ограничитель сигнала выполнен в виде блока с зоной нечувствительности, пропорциональной величине рабочего хода подвижного элемента, вход которого соеди- нен с датчиком обратной связи, а выход - с отрицательным входом сумматора.
и опасности удара нет, сигнал на выходе б.(1ока 9 равен нулю и блок 9 не ока- 31|11вает влияния на работу электрогидрав- лйческой системы.
При выходе сигнала задатчика за границы, соответствующие перемещению золот%Х.
%.
.2
Составитель С. Рождественский
Редактор Н. БобковаТехред И. ВересКорректор А. Тяско
Заказ 4141/36 Тираж 652Подписное
ВНИИПИ Государственного комитета СССР но делам изобретений и открытий
1 13035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфнческое преднриятие, г. Ужгород, ул. Проектная, 4
г
0
ника в диапазоне рабочего хода, сигнал обратной связи по положению с выхода усилителя 8 также превышает заданный уровень. На выходе блока 9 появляется сигнал.
Знак выходного напряжения блока 9 соответствует знаку напряжения выхода усилителя 8, а коэффициент усиления достаточно высок, так что малые перемещения золотника 5 за пределы рабочего хода, соответствующего зоне нечувствительности блока 9, вызывают значительные изменения сигнала на выходе. Сигналы усилителя 8 и блока 9 в сумме компенсируют сигнал задатчика.
Выбором коэффициента передачи по вновь вводимой цепи - коэффициент усиления собственно блока 9 и величина входного резистора сумматора 1 - можно обеспечить нечувствительность электрогидравлической системы к перегрузкам по
0 входным сигналам заданной кратности.
Формула изобретения Электрогидравлическая следящая систе, содержащая последовательно связанные
0 золотника
огр.
Фиг З
| Электрогидравлический следящий привод | 1984 |
|
SU1245768A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
