вую схему. Таким образом датчик 5 об- 5 дифференциатором, сумматором, элекратной связи вьтолняет функции датчика положения штока 29 и сигнал с него, поступает непосредственно на вход сумматора 12. Происходит переключение слива и-питания от гидроусилителя 3 на клапаны 20 и 21, в исходном состоянии, находящихся в режиме слива. При срабатьшании одного из них в полость 27 или 28 подается давление, что приводит к перемещению шт о- ка 29 исполнительного гидродвнгателя 4 до тех пор, пока на вход сумматора 12 не будет подан сигнал противоположного знака, что вызовет срабатывание соответствующего компаратора . 34 или 35 и соответствующего ключа и шток 29 гидродвигателя 4 установится в среднем положении
Формула из-обретения
Электрогидравлический следящий . привод, содержащий последовательно соединенные задатчик, постоянное сравнивающее устройство, гидроусилй- тель и исполнительньй гидродвигатель с датчиком обратной связи, подключентромагнитньш реле с четырьмя контактами, двумя резисторами и четырьмя управляемыми клапанами, а переключающее устройство вьтолнено с тремя
20 ключами, причем вход дифференциатора подключен к датчику обратной связи, связанному через первый и второй кон такты реле с резисторами, а через третий контакт - с первым выходом
25 сумматора и первым выходом буферного блока фазовой коррекции входы которого соединены с эадатчиком и выходом дифференциатора, а второй выход - с четвертым контактом реле и вторым входом сумматора, выход последнего через блок сравнения связан с входами дискриминатора полярности, выходы которого соединены через два ключа с двумя управляемыми клапанами, непосредственно подключенньми к полостям гидродвигателя, и через генератор опорной частоты и счетчик тактов - с другим ключом, соединенным с двумя другими управляемыми клапанами, подключенными к полостям гидродвигателя через гидроусилитель, и с обмоткой реле.
30
35
40
тромагнитньш реле с четырьмя контактами, двумя резисторами и четырьмя управляемыми клапанами, а переключающее устройство вьтолнено с тремя
0 ключами, причем вход дифференциатора подключен к датчику обратной связи, связанному через первый и второй контакты реле с резисторами, а через третий контакт - с первым выходом
5 сумматора и первым выходом буферного блока фазовой коррекции входы которого соединены с эадатчиком и выходом дифференциатора, а второй выход - с четвертым контактом реле и вторым входом сумматора, выход последнего через блок сравнения связан с входами дискриминатора полярности, выходы которого соединены через два ключа с двумя управляемыми клапанами, непосредственно подключенньми к полостям гидродвигателя, и через генератор опорной частоты и счетчик тактов - с другим ключом, соединенным с двумя другими управляемыми клапанами, подключенными к полостям гидродвигателя через гидроусилитель, и с обмоткой реле.
0
5
0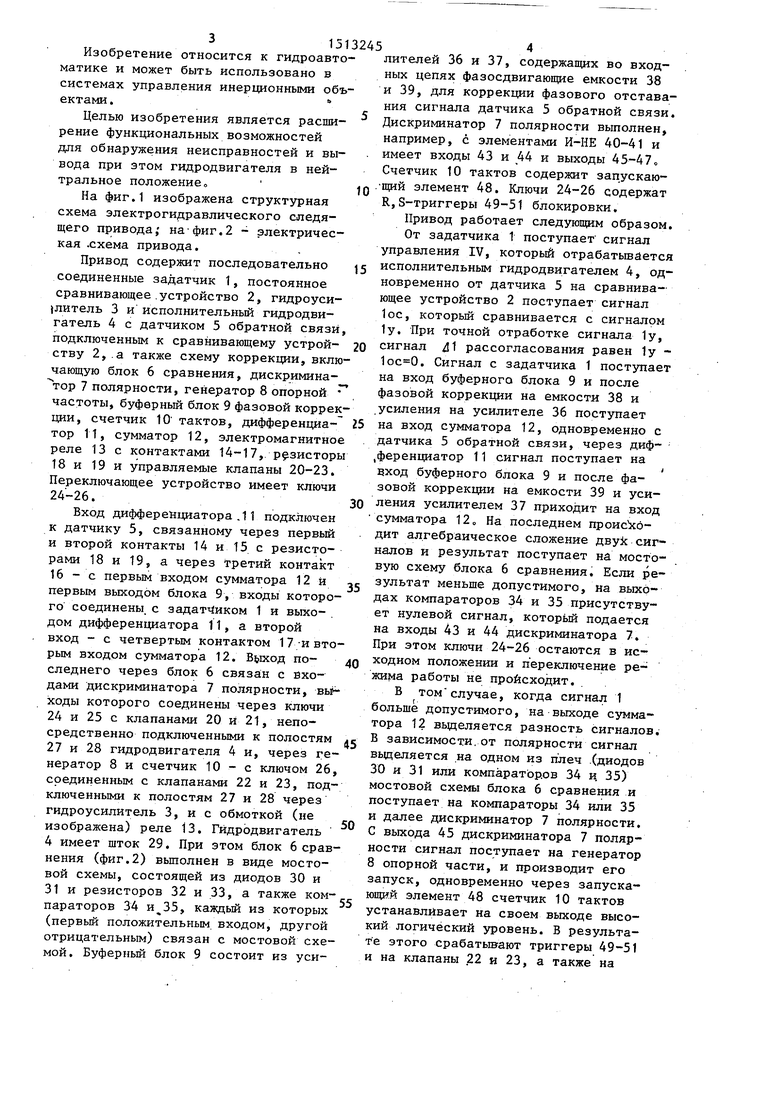
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1983 |
|
SU1134809A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| Электрогидравлическая следящая система | 1980 |
|
SU937796A1 |
| Электрогидравлическая следящаяСиСТЕМА | 1979 |
|
SU808712A1 |
| Цифровое устройство для измерения температуры | 1982 |
|
SU1006937A1 |
| Устройство для измерения амплитуды импульсных усилий | 1986 |
|
SU1352254A1 |
| Цифроаналоговая следящая система | 1986 |
|
SU1405025A1 |
| Система управления конверторной плавкой | 1982 |
|
SU1046290A1 |
| ИЗМЕРИТЕЛЬ ВЛАЖНОСТИ ЗЕРНА | 1992 |
|
RU2034288C1 |
| Устройство для управления приводом промышленного робота | 1978 |
|
SU729546A1 |
Изобретение может быть использовано в системах управления инерционными объектами. Цель изобретения - расширение функциональных возможностей следящего привода для обнаружения неисправностей и вывода гидродвигателя в нейтральное положение. Датчик 5 обратной связи исполнительного гидродвигателя 4 подключен к постоянному сравнивающему устройству 2. Схема коррекции включает блок 6 сравнения, дискриминатор 7 полярности и генератор 8 опорной частоты и подключена через переключающее устройство к гидроусилителю 3. Схема снабжена буфферным блоком 9 фазовой коррекции. Вход дифференциатора 11 подключен к датчику 5, связанному через контакты 14, 15 реле 13 с резисторами 18, 19, через контакт 16 с выходом сумматора (С) 12 и выходом блока 9. Входы блока 9 соединены с задатчиком 1 и выходом дифференциатора 11, выход - с контактом 17 реле 13 и вторым входом С 12. Выход С 12 через блок 6 связан с входами дискриминатора 7, выходы которого соединены через ключи 25, 24 с управляемыми клапанами 20, 21, непосредственно подключенными к полостям 27, 28 гидродвигателя 4. Выход С 12 через генератор 8 опорной частоты и счетчик 10 тактов ключом 26 соединен с клапанами 22, 23, подключенными к полостям 27, 28 через гидроусилитель 3, и с обмоткой реле 13. 2 ил.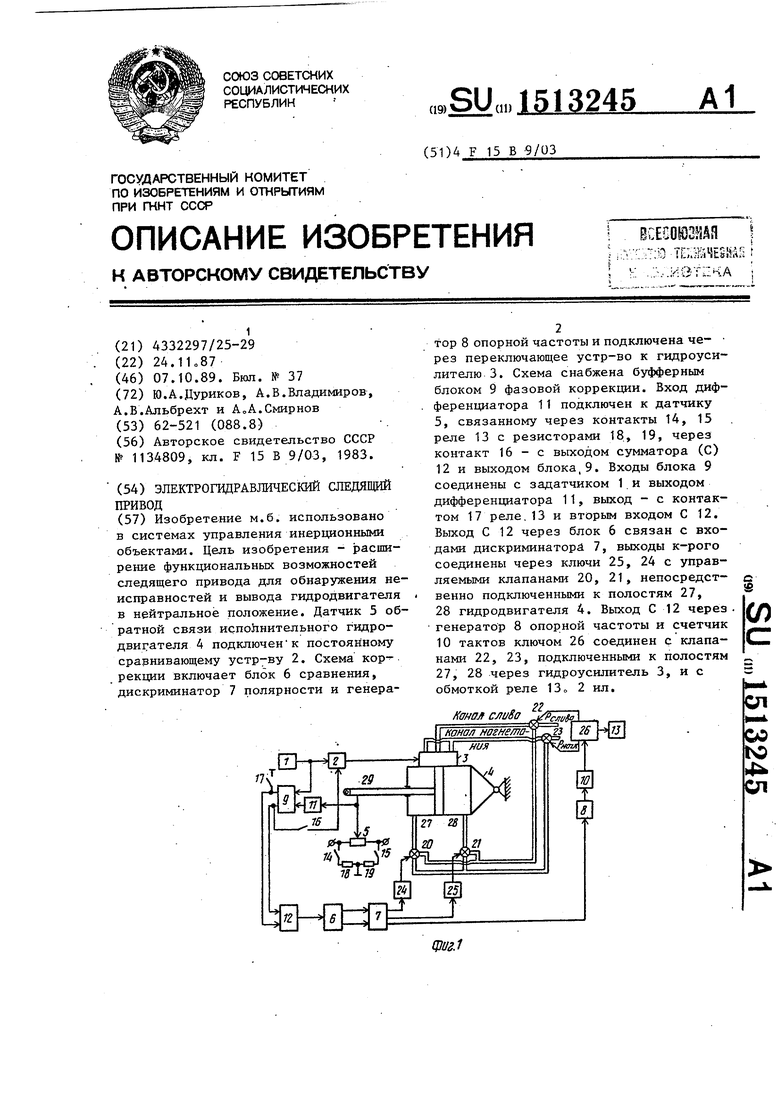
| Электрогидравлический следящий привод | 1983 |
|
SU1134809A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
