Изобретение относится к области военной техники, а именно к вращающимся ракетам, и может быть использовано при разработке устройств угловой стабилизации управляемых ракет реактивных систем залпового огня.
Для успешной борьбы с наземными целями в настоящее время широко применяются реактивные системы залпового огня, в состав которых входят как неуправляемые, так и управляемые вращающиеся ракеты с различными системами управления или стабилизации траектории, обеспечивающие заданную точность и кучность стрельбы.
Так, известна система угловой стабилизации ракеты к комплексу залпового огня "Смерч" (см. например, журнал "Military Parade", М., АО "Милитэри Перейд", may - june 1994, р.22-27), принятая за аналог. Эта система содержит датчик угловых отклонений ракеты, блок преобразования и исполнительный орган. Достоинством этой системы является простота конструкции и надежность функционирования в составе ракеты.
Задачей данного технического решения являлось повышение точности стрельбы по сравнению с неуправляемыми ракетами систем залпового огня.
Общими признаками с предлагаемой авторами системой угловой стабилизации является наличие в системе - аналоге датчика угловых отклонений ракеты, блока преобразования и исполнительного органа.
Наиболее близкой по технической сути и достигаемому техническому результату к изобретению является двухканальная система угловой стабилизации вращающейся ракеты (см. Кузовков Н.Т. Системы стабилизации летательных аппаратов. - М. : Высшая школа, 1976, С.237. фиг. 7.16), принятая за прототип. Она содержит датчик угловых отклонений с чувствительным элементом, связанным с электроприводом, блок преобразования и исполнительный орган.
Система стабилизации, принятая за прототип, функционирует следующим образом. Датчик угловых отклонений выдает сигнал в блок преобразования координат. Преобразованное по двум каналам в связанную с ракетой систему координат угловое отклонение ракеты отрабатывается исполнительным органом.
Задачей данного технического решения (прототипа) являлось повышение точности стабилизации ракеты за счет увеличения количества каналов формирования сигналов управления.
К причинам, препятствующим достижению указанного ниже технического результата при использовании известной системы стабилизации, принятой за прототип, относится то, что в ней инструментальные ошибки отдельных элементов и узлов не позволяют добиться адекватного преобразования сигнала рассогласования по каналам стабилизации, вызывая тем самым асимметрию в формировании результирующего сигнала и, как следствие, ошибку в формировании управляющего (стабилизирующего) усилия исполнительным органом.
Общими признаками с предлагаемой системой стабилизации является наличие в системе - прототипе датчика угловых отклонений с чувствительным элементом, связанным с электроприводом, блока преобразования и исполнительного органа.
В отличие от прототипа в предлагаемой системе стабилизации датчик угловых отклонений снабжен сигнальной и опорной катушками, чувствительный элемент датчика угловых отклонений оснащен постоянным магнитом, а блок преобразования снабжен двумя инверторами и последовательно соединенными демодулятором и фильтром нижних частот, выход которого связан со входом исполнительного органа, демодулятор выполнен в виде двух электронных ключей, выходы которых соединены и являются выходом демодулятора, причем выход сигнальной катушки подключен к сигнальному входу первого ключа непосредственно и через первый инвертор - к сигнальному входу второго ключа, а выход опорной катушки подключен к управляющему входу первого ключа непосредственно и через второй инвертор - к управляющему входу второго ключа.
Это позволяет сделать вывод о наличии причинно - следственной связи между совокупностью существенных признаков заявляемого технического решения и достигаемым техническим результатом.
Указанные признаки, отличительные от прототипа и на которые распространяется испрашиваемый объем правовой защиты, во всех случаях достаточны.
Задачей предлагаемого изобретения является повышение точности стабилизации ракеты за счет формирования результирующего сигнала рассогласования с последующим его преобразованием в результирующий сигнал управления без его разложения по каналам.
Это достигается тем, что в устройстве угловой стабилизации, содержащем датчик угловых отклонений с чувствительным элементом, связанным с электроприводом, блок преобразования и исполнительный орган, согласно изобретению датчик угловых перемещений снабжен сигнальной и опорной катушками, чувствительный элемент датчика угловых отклонений оснащен постоянным магнитом, а блок преобразования снабжен двумя инверторами и последовательно соединенными демодулятором и фильтром нижних частот, выход которого связан со входом исполнительного органа, демодулятор выполнен в виде двух электронных ключей, выходы которых соединены и являются выходом демодулятора, причем выход сигнальной катушки подключен к сигнальному входу первого ключа непосредственно, и через первый инвертор - к сигнальному входу второго ключа, а выход опорной катушки подключен к управляющему входу первого ключа непосредственно и через второй инвертор - к управляющему входу второго ключа.
Сущность изобретения поясняется чертежом, где изображена схема предлагаемого устройства, включающая датчик угловых отклонений 1, в состав которого входят чувствительный элемент 2 с постоянным магнитом 3, приводимый во вращение электроприводом 4, а также сигнальная 5 и опорная 6 катушки. Блок преобразования 7 включает в себя инверторы 8 и 9, демодулятор 10 в составе электронных ключей 11 и 12 и фильтр нижних частот 13 с выходом на исполнительный орган 14.
Предлагаемое устройство стабилизации работает следующим образом.
Перед запуском ракеты электропривод 4 раскручивает чувствительный элемент 2 для придания ему гироскопических свойств. Производится запуск ракеты. При угловом отклонении продольной оси ракеты под действием внешних возмущений постоянный магнит 3 наводит в сигнальной катушке 5 переменное напряжение, амплитуда которого пропорциональна величине углового отклонения, а частота равна частоте вращения чувствительного элемента. Одновременно в опорной катушке 6 магнит наводит переменное напряжение с постоянной амплитудой и частотой, равной частоте вращения электропривода 4. Напряжение сигнальной катушки 5 поступает на вход инвертора 8, формирующего сигнал, противофазный входному, далее указанные сигналы поступают соответственно на входы ключей 11 и 12 демодулятора 10. Одновременно напряжение опорной катушки 6 поступает на вход инвертора 9, формирующего сигнал, противофазный входному, далее указанные сигналы поступают соответственно на управляющие входы ключей 11 и 12 демодулятора. После фильтрации сигнала, формирующегося на объединенном выходе демодулятора, фильтром нижних частот 13 на выходе последнего получается результирующий сигнал, соответствующий угловому отклонению ракеты, уже на частоте ее вращения, т.е. в связанной системе координат.
То, что датчик угловых отклонений устройства угловой стабилизации снабжен сигнальной и опорной катушками, а чувствительный элемент оснащен постоянным магнитом и связан с электроприводом, позволило сформировать сигнал рассогласования как результирующий, без раскладки его по каналам стабилизации, на частоте модуляции, задаваемой частотой вращения электропривода. Введение в блок преобразования двух инверторов, двух электронных ключей и фильтра нижних частот, соединенных согласно изобретению, позволило демодулировать результирующий сигнал рассогласования и преобразовать его в связанную, вращающуюся с ракетой, систему координат, то есть сформировать управляющий сигнал на частоте вращения ракеты, получаемой как разность частот переменного напряжения в сигнальной катушке и опорной.
Сигнал рассогласования с чувствительного элемента, формируемый как результирующий в инерциальной невращающейся системе координат, преобразуется также в результирующий управляющий сигнал, но уже в связанной с ракетой системе координат, минуя операцию его раскладки по каналам с неизбежными при этом искажениями (асимметрией) вследствие разбросов характеристик каналов из-за погрешностей их технической реализации.
Выполнение устройства стабилизации в соответствии с изобретением позволило снизить уровень инструментальных ошибок формирования управляющего сигнала и тем самым повысить точность угловой стабилизации по сравнению с прототипом на 15-20%. Указанный положительный эффект подтвержден летно-конструкторскими испытаниями опытных образцов систем угловой стабилизации, выполненных в соответствии с изобретением, в составе ракет дальнобойной системы залпового огня.
В настоящее время разрабатывается рабочая конструкторская документация на систему угловой стабилизации, намечено ее серийное производство.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2002 |
|
RU2231015C1 |
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2001 |
|
RU2205355C2 |
| СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2000 |
|
RU2181875C2 |
| ПРЕОБРАЗОВАТЕЛЬ СИГНАЛОВ УСТРОЙСТВА УГЛОВОЙ СТАБИЛИЗАЦИИ РЕАКТИВНОГО СНАРЯДА | 2005 |
|
RU2382321C2 |
| СИСТЕМА УГЛОВОЙ СТАБИЛИЗАЦИИ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 2009 |
|
RU2401975C1 |
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 2010 |
|
RU2435129C1 |
| ВРАЩАЮЩАЯСЯ САМОНАВОДЯЩАЯСЯ РАКЕТА | 2002 |
|
RU2216707C1 |
| РАКЕТА | 1998 |
|
RU2125704C1 |
| РАКЕТА | 1998 |
|
RU2125701C1 |
| ГИРОГОРИЗОНТ ДЛЯ АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2178143C1 |
Изобретение относится к области военной техники, а именно к вращающимся ракетам, и может быть использовано при разработке устройств угловой стабилизации управляемых ракет реактивных систем залпового огня. Техническая задача - повышение точности стабилизации. Сущность изобретения заключается в том, что в устройстве угловой стабилизации вращающейся ракеты, содержащем датчик угловых отклонений с чувствительным элементом, связанным с электроприводом, блок преобразования и исполнительный орган, датчик угловых отклонений снабжен сигнальной и опорной катушками, чувствительный элемент датчика угловых отклонений оснащен постоянным магнитом, а блок преобразования снабжен двумя инверторами и последовательно соединенными демодулятором и фильтром нижних частот, выход которого связан со входом исполнительного органа, при этом демодулятор выполнен в виде двух электронных ключей, выходы которых соединены и являются выходом демодулятора, причем выход сигнальной катушки подключен к сигнальному входу первого ключа непосредственно и через первый инвертор - к сигнальному входу второго ключа, а выход опорной катушки подключен к управляющему входу первого ключа непосредственно и через второй инвертор - к управляющему входу второго ключа. Изобретение позволяет повысить точность стрельбы за счет повышения точности угловой стабилизации ракеты. 1 ил.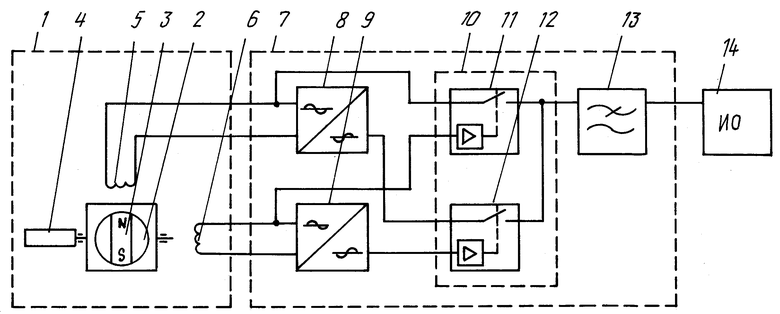
Устройство угловой стабилизации вращающейся ракеты, содержащее датчик угловых отклонений с чувствительным элементом, связанным с электроприводом, блок преобразования и исполнительный орган, отличающееся тем, что в нем датчик угловых отклонений снабжен сигнальной и опорной катушками, чувствительный элемент датчика угловых отклонений оснащен постоянным магнитом, а блок преобразования снабжен двумя инверторами и последовательно соединенными демодулятором и фильтром нижних частот, выход которого связан со входом исполнительного органа, при этом демодулятор выполнен в виде двух электронных ключей, выходы которых соединены и являются выходом демодулятора, причем выход сигнальной катушки подключен к сигнальному входу первого ключа непосредственно и через первый инвертор - к сигнальному входу второго ключа, а выход опорной катушки подключен к управляющему входу первого ключа непосредственно и через второй инвертор - к управляющему входу второго ключа.
| Кузовков Н.Т | |||
| Системы стабилизации летательных аппаратов | |||
| - М.: Высшая школа | |||
| Планшайба для точной расточки лекал и выработок | 1922 |
|
SU1976A1 |
| Прибор для корчевания пней | 1921 |
|
SU237A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Самонаправляющееся боевое средство | 1947 |
|
SU351060A1 |
| Самонаправляющееся боевое средство | 1949 |
|
SU837143A2 |
| СПОСОБ ПОВЫШЕНИЯ ПРОДУКТИВНОСТИ МОЛОДНЯКА КРОЛИКОВ | 2018 |
|
RU2694626C1 |
| Экономайзер | 0 |
|
SU94A1 |
| US 4168813, 25.09.79. | |||
