Изобретение относится к области гироскопической техники и предназначено для использования в системах стабилизации и управления средствами залпового огня.
В качестве датчиков информации об углах наклона подвижных объектов используются гироскопические датчики горизонта (датчики крена, гировертикали, силовые гирогоризонты индикаторного типа и т. д. ).
В настоящее время все более широкое применение для наземных самоходных объектов (НСО) находят силовые гирогоризонты индикаторного типа. Известен гирогоризонт, входящий конструктивно в системы самоориентирующиеся гироскопические курсокреноуказания [1] , и в системы, разработанные для систем навигации, стабилизации и управления НСО [2] .
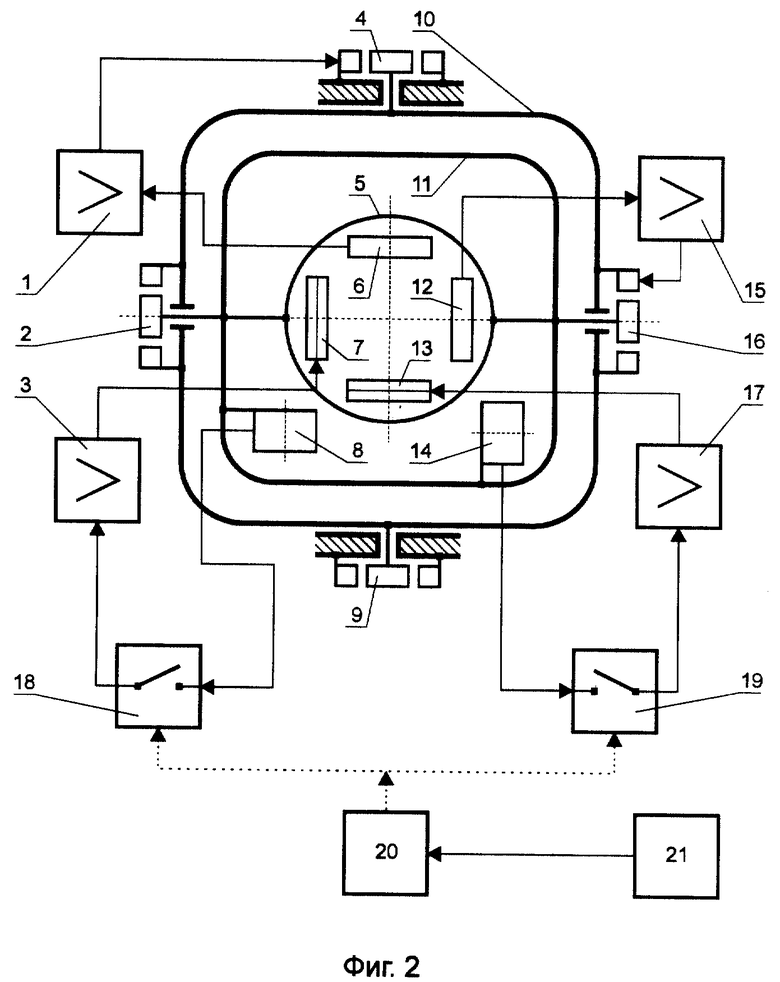
В качестве прототипа для предлагаемого изобретения принят гирогоризонт системы самоориентирующейся гироскопической курсокреноуказания [1, 2] , который представлен на фиг. 1.
Гирогоризонт содержит гироузел 5, по ортогональным измерительным осям которого расположены датчики момента 7, 13 и датчики угла 6, 12. Гироузел 5 и чувствительные элементы горизонта 8, 14 установлены на внутренней раме 11 карданова подвеса. По осям внутренней 11 и наружной 10 рам карданова подвеса установлены двигатели разгрузки 16 и 4, датчики выходной информации 2 и 9 соответственно.
Выходы чувствительных элементов горизонта 8, 14 через усилители горизонтальной коррекции 3, 17 подключены к входам соответствующих датчиков момента 7, 13 гироузла 5, а выходы датчиков угла 6, 12 гироузла 5 через усилители мощности 1, 15 подключены к входам соответствующих двигателей разгрузки 4, 16. Информация об углах наклона объекта с датчиков выходной информации 2, 9 поступает на вход систем стабилизации и навигации.
Работа гирогоризонта происходит следующим образом. При отклонении платформы от плоскости горизонта относительно, например, оси внутренней рамы 11 карданова подвеса, сигнал с чувствительного элемента горизонта 14 через усилитель горизонтальной коррекции 17 поступает на вход датчика момента 13, развивающего момент, под действием которого главная ось гироскопа гироузла 5 прецессирует к положению местной вертикали. При этом сигнал с датчика угла 12 через усилитель мощности 15 поступает на управляющие обмотки двигателя разгрузки 16, развивающего момент, под действием которого отрабатывается прецессия гироскопа и внутренняя рама 11 карданова подвеса разворачивается в плоскость горизонта. Аналогично происходит отработка при отклонении платформы от плоскости горизонта относительно оси наружной рамы 10 карданова подвеса.
В общем случае точность гирогоризонта определяется параметрами элементов, входящих в систему горизонтальной коррекции, условиями эксплуатации и параметрами движения, а именно величиной и длительностью ускорений, дрейфом гироскопа гироузла и реакцией гироскопа на ускорения (скоростью прецессии главной оси гироскопа от горизонтальной коррекции). Скорость горизонтальной коррекции устанавливается на практике, исходя из обеспечения реальной точности в заданных условиях эксплуатации объекта.
Применяемый в гирогоризонте в качестве чувствительного элемента горизонта датчик жидкостный маятниковый имеет смешанную характеристику (линейную с насыщением) зависимости выходного сигнала от угла наклона с малой зоной линейности от 10 до 15 угловых минут. Вследствие этого, отклонение главной оси гироскопа от истинной вертикали к кажущейся под воздействием горизонтальной составляющей ускорения происходит с максимальной скоростью коррекции.
При этом динамическая погрешность βд гирогоризонта, т. е. отклонение внутренней рамы 11 карданова подвеса от плоскости горизонта, определяется соотношением
βд= ωкt,
где ωк- скорость прецессии гироскопа от горизонтальной коррекции,
t - длительность линейного ускорения.
Снижение скорости коррекции с целью уменьшения динамической погрешности гирогоризонта ограничено статической погрешностью, определяемой соотношением
βc= ωдр/ωк,
где ωдр- скорость ухода гироскопа, определяемая собственным уходом гироскопа и уходом истинной вертикали места в пространстве под действием горизонтальной составляющей скорости вращения Земли;
ωк- скорость прецессии гироскопа от горизонтальной коррекции (скорость горизонтальной коррекции).
Принимая во внимание то, что современные гироскопы имеют собственный дрейф от 0,01 до 0,05 градусов в час, статическая погрешность в основном определяется отношением:
βc= ωз•cosϕ/ωк,
где ωз= град/час, угловая скорость вращения Земли,
ϕ- значение географической широты местонахождения объекта.
Исходя из этого соотношения и учитывая линеаризацию характеристики маятникового датчика на качке, на практике скорость горизонтальной коррекции ωк устанавливается в пределах от 1 до 2 градусов в минуту.
Принципиальное значение приобретает динамическая составляющая погрешности гирогоризонта при ведении средствами вооружения залпового огня, когда время стрельбы достаточно значимо для нарастания динамической погрешности (зенитные ракетно-пушечные комплексы типа "Тунгуска", ракетные установки залпового огня "Смерч", "Град", "Ураган").
При ведении залпового огня на маятниковые датчики горизонта действуют повышенные возмущения и, как следствие, нарастание динамической погрешности в этот период происходит с максимальной скоростью, определяемой горизонтальной скоростью коррекции. Так, при длительности стрельбы порядка 10 секунд и скорости ωк горизонтальной коррекции 2 градуса в минуту, динамическая погрешность составляет
βд= ωкt = 2•10 = 20[угл. мин],
что равнозначно уводу линий выстрела от цели на дистанции стрельбы в 10 км на 55 метров.
Таким образом, недостатком гирогоризонта-прототипа является высокая динамическая погрешность определения углов наклона и установки в плоскости горизонта стабилизированной платформы при ведении огня.
Изобретение направлено на повышение точности гирогоризонта, за счет снижения динамической составляющей погрешности. Это достигается тем, что в гирогоризонт, содержащий карданов подвес, состоящий из рамы внутренней и рамы наружной с установленными по осям подвеса двигателями разгрузки и датчиками выходной информации, чувствительные элементы горизонта, установленные на раме внутренней карданова подвеса, усилители горизонтальной коррекции и усилители мощности, гироузел, установленный на раме внутренней карданова подвеса и имеющий измерительные оси, образованные ортогонально размещенными датчиками момента и датчиками угла, причем выходы чувствительных элементов горизонта через усилители горизонтальной коррекции подключены к входам соответствующих датчиков момента гироузла, а выходы датчиков угла гироузла через усилители мощности подключены к входам соответствующих двигателей разгрузки, введены коммутирующие устройства, управляющее устройство и задающее устройство, причем выходы чувствительных элементов горизонта подключены к входам усилителей горизонтальной коррекции через коммутирующие устройства, входы коммутирующих устройств подключены к выходу управляющего устройства, вход которого подключен к выходу задающего устройства.
На фиг. 1 представлена функционально-кинематическая схема прототипа.
На Фиг. 2 представлена функционально-кинематическая схема предлагаемого гирогоризонта.
Гирогоризонт для автоматизированных систем управления огнем содержит гироузел 5, по ортогональным измерительным осям которого расположены датчики момента 7, 13 и датчики угла 6, 12. Гироузел 5 и чувствительные элементы горизонта 8, 14 установлены на внутренней раме 11 карданова подвеса. По осям внутренней 11 и наружной 10 рам карданова подвеса установлены двигатели разгрузки 16 и 4, датчики выходной информации 2 и 9 соответственно.
Выходы чувствительных элементов горизонта 8, 14 подключены к усилителям горизонтальной коррекции 3, 17 через коммутирующие устройства 18, 19, входы которых подключены к выходу управляющего устройства 20, вход которого подключен к выходу задающего устройства 21.
Выходы усилителей горизонтальной коррекции 3, 17 подключены к входам соответствующих датчиков момента 7, 13 гироузла 5, а выходы датчиков угла 6, 12 гироузла 5 через усилители мощности 1, 15 подключены к входам соответствующих двигателей разгрузки 4, 16. Информация об углах наклона объекта с датчиков выходной информации 2, 9 поступает на вход систем стабилизации и навигации.
Принцип действия предлагаемого гирогоризонта для автоматизированных систем управления огнем заключается в следующем. При поступлении сигнала с задающего устройства 21 - это может быть, например, команда "сход ракеты с направляющих" с вычислителя автоматизированной системы управления наведением и огнем (АСУНО) или сигнал непосредственно с электропускового устройства стрельбы при нажатии кнопки (гашетки) - управляющее устройство 20 размыкает контакты коммутирующих устройств 18, 19. Таким образом размыкается цепь горизонтальной коррекции - чувствительный элемент горизонта 8 (14) - усилитель горизонтальной коррекции 3 (17) - датчик момента 7 (13). При этом гироузел 5 переводится в режим некорректирующего свободного гироскопа, тем самым исключается влияние перегрузок, действующих во время стрельбы, и линейных ускорений, связанных с движением объекта, т. е. практически полностью исключая динамическую составляющую погрешности гирогоризонта.
Проведем оценку точности гирогоризонта в режиме свободного некорректирующего гироскопа. Свободный дрейф гироскопа складывается из собственного случайного дрейфа гироскопа и дрейфа под воздействием горизонтальной составляющей суточной скорости вращения Земли. Принимая во внимание то, что собственный случайный дрейф современных гироскопов составляет от 0,01 до 0,005 градусов в час (динамически настраиваемых вибрационных гироскопов, например типа ГВК), уход гироскопа в свободном режиме определяется в основном горизонтальной составляющей скорости Земли, максимальное значение которой на экваторе (ϕ = 0) составляет 15 градусов в час. При длительности залпового огня 10 секунд уход гироскопа на экваторе (ϕ = 0) составит
βc= ωз•cosϕ•t = 2,5[угл. мин],
что соответствует уводу линии выстрела на дистанции стрельбы 10 км на 6,9 метров.
Таким образом, погрешность гирогоризонта и, как следствие, увод линии выстрела в свободном режиме гироскопа в 7-8 раз меньше аналогичных погрешностей при работе гироскопа в корректируемом режиме.
В качестве гироскопа гироузла гирогоризонта могут быть использованы динамически настраиваемые гироскопы, например типа ГВК (гироскоп с внутренним карданом), или модуляционные гироскопы, и другие. При этом на одной измерительной оси чувствительного элемента может быть более одного датчика момента, например в ГВК, - основной и компенсационный датчик момента. При этом выбор конкретного датчика для осуществления связей между элементами системы зависит от конкретного гироскопа и его технических характеристик.
В качестве датчиков выходной информации могут быть использованы датчики любого типа, преобразующие механический угол поворота в электрический сигнал - аналоговый или цифровой. Это могут быть сами датчики аналогового типа, например синусно-косинусные вращающиеся трансформаторы, или датчики с преобразователями, если требуется, в цифровой код. Преобразователи могут быть любого типа - фазовые, амплитудные и т. д.
В качестве чувствительных элементов горизонта могут быть использованы датчики различного типа, например жидкостные маятниковые переключатели, акселерометры и т. д.
В качестве коммутирующих устройств могут быть использованы устройства различного типа - электромеханические (реле), электронные (на микросхемах и других радиоэлементах).
В качестве управляющего устройства могут быть использованы различные электронные устройства, преобразующие либо цифровые сигналы с вычислителя АСУНО, либо аналоговые с электропускового устройства стрельбы, и другие в управляющие сигналы для коммутирующих устройств.
Задающим устройством может быть либо бортовой вычислитель, либо вычислитель АСУНО, либо электропусковое устройство стрельбы и т. д.
Реализация изобретения позволит исключить динамические погрешности гирогоризонта при выполнении стрельбы как при движении, так и на стоянке, и, таким образом, значительно повысить эффективность поражения цели средствами вооружения залпового огня.
Литература
1. Система самоориентирующаяся гироскопическая курсокреноуказания. Патент на изобретение РФ 2124184, приоритет от 15.12.96.
2. Изделие 1Т215М. Техническое описание АЮИЖ. 462414.020 ТО. ВНИИ "Сигнал", г. Ковров, 1998.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОГОРИЗОНТ С ДИСКРЕТНОЙ СИСТЕМОЙ ГОРИЗОНТАЛЬНОЙ КОРРЕКЦИИ | 2000 |
|
RU2172473C1 |
| ГИРОГОРИЗОНТ ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ДЕФОРМАЦИЙ ОПОР РАДИОЛОКАЦИОННЫХ СТАНЦИЙ | 2001 |
|
RU2207508C1 |
| СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2186339C1 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
| ГИРОГОРИЗОНТ | 2001 |
|
RU2207509C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ С УСТРОЙСТВОМ ВСТРОЕННОГО КОНТРОЛЯ | 2001 |
|
RU2207505C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2003 |
|
RU2258205C1 |
| САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2166733C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
Гирогоризонт предназначен для измерения углов наклона подвижного объекта в автоматизированных системах стабилизации средств вооружения и управления залповым огнем. Технический результат - повышение эффективности средств вооружения за счет исключения динамической погрешности гирогоризонта во время стрельбы. При ведении стрельбы коммутирующие устройства отключают систему горизонтальной коррекции и переводят гирогоризонт в режим свободного гироскопа. Для этого выходы чувствительных элементов горизонта подключены к входам усилителей горизонтальной коррекции через коммутирующие устройства, входы которых подключены к выходу управляющего устройства, а его вход - к выходу задающего устройства. 2 ил.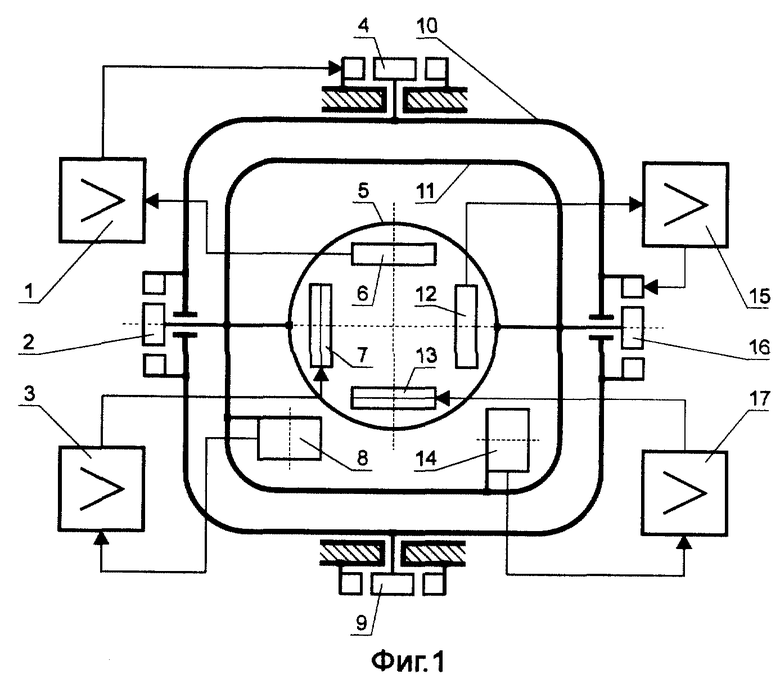
Гирогоризонт для автоматизированных систем управления огнем, содержащий карданов подвес, состоящий из рамы внутренней и рамы наружной с установленными по осям подвеса двигателями разгрузки и датчиками выходной информации, чувствительные элементы горизонта, установленные на раме внутренней карданова подвеса, усилители горизонтальной коррекции и усилители мощности, гироузел, установленный на раме внутренней карданова подвеса и имеющий измерительные оси, образованные ортогонально размещенными датчиками момента и датчиками угла, причем выходы чувствительных элементов горизонта через усилители горизонтальной коррекции подключены к входам соответствующих датчиков момента гироузла, а выходы датчиков угла гироузла через усилители мощности подключены к входам соответствующих двигателей разгрузки, отличающийся тем, что для размыкания цепи горизонтальной коррекции при ведении огня в гирогоризонт введены коммутирующие устройства, управляющее устройство и задающее устройство, причем выходы чувствительных элементов горизонта подключены к входам усилителей горизонтальной коррекции через коммутирующие устройства, входы коммутирующих устройств подключены к выходу управляющего устройства, вход которого подключен к выходу задающего устройства.
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| ГИРОГОРИЗОНТ | 1993 |
|
RU2062987C1 |
| DE 3033280 А, 22.01.1982. | |||

