Изобретение относится к электротехнике и может быть использовано в устройствах ударного действия с линейным электромагнитным двигателем, в котором рабочий ход якоря осуществляется за счет единственной системы обмоток, а его возврат под действием механического усилия, например, под действием усилия возвратной пружины.
Известен способ управления однообмоточным линейным электромагнитным двигателем, состоящий в том, что напряжение на обмотку подается в период рабочего хода при оптимальном начальном воздушном зазоре и неподвижном якоре, а по завершении рабочего хода якоря источник питания отключают (см., например, П.С. Туровский, А.В.Фролов // Расчет, конструирование и создание электромагнитных генераторов силовых импульсов. - Фрунзе: Илим. 1984. - 128 с., стр. 40).
Недостатком известного способа управления является низкая удельная энергия удара и КПД линейного электромагнитного двигателя.
Известен также способ управления однообмоточным двигателем колебательного движения, заключающийся в том, что периодически изменяют полярность питающего напряжения, при этом в каждом полупериоде изменения питающего напряжения прерывают питание обмотки двигателя (авт.св. N 1601729 Способ управления однообмоточным двигателем колебательного движения. Опубл. в Б.И., 1990, N 39).
Однако недостатком данного способа управления является также низкая удельная энергия удара.
Наиболее близким по технической сущности к предлагаемому изобретению аналогом является способ управления линейным электромагнитным двигателем однообмоточного типа с удержанием якоря, заключающейся в том, что обмотку электромагнитного двигателя подключают к источнику питания, а якорь неподвижно удерживают, причем движение якорь под действием этой обмотки получает, когда величина тока трогания достигнет установленного значения, а электромагнитное усилие превысит усилие удержания якоря. По завершении рабочего хода источник питания отключают, а якорь при обесточенной обмотке совершает холостой ход (Н. П. Ряшенцев, Г.Г. Угаров, А.В. Львицын. Электромагнитные прессы. - Новосибирск: Наука. Сиб. отд-ние, 1989. - 215 с., стр. 99, 169).
Однако данный способ управления в свою очередь ведет к увеличению линейных размеров, массы и усложнению конструкции за счет использования вспомогательных устройств для удержания якоря на этапе трогания в период рабочего и холостого хода, что также снижает удельную энергию удара. К основным недостаткам данного способа также следует отнести повышенный шум в работе, вызванный механическим взаимодействием якоря и удерживающего устройства, его низкую надежность, регулирование в узком диапазоне энергии удара.
Техническая задача, решаемая в предлагаемом изобретении, заключается в увеличении удельной энергии удара при повышении КПД двигателя.
Поставленная задача решается тем, что на обмотку двигателя подают импульс напряжения, причем, первый импульс напряжения подают в период рабочего хода якоря, а второй и последующие импульсы напряжения в период холостого хода с периодом не более суммарного времени рабочего и холостого хода.
Таким образом, сущность изобретения заключается в том, что при возврате якоря под действием механического усилия (например, усилия возвратной пружины), до момента времени, когда якорь займет начальное положение, на обмотку подают напряжение, под действием которого в цепи обмотки начинает протекать ток, величина которого к моменту времени начала рабочего хода якоря следующего цикла успевает достичь предельного значения, чем обеспечивается увеличение удельной энергии удара без увеличения веса двигателя, повышение КПД и надежности.
При этом для увеличения начального тока трогания якоря двигателя не требуется специальных устройств удержания, увеличивающих массу и снижающих удельные показатели.
Предлагаемый способ осуществляется следующим образом.
В момент включения первый импульс напряжения подают на обмотку двигателя в период рабочего хода якоря, а затем отключают его. Второй импульс напряжения подают в период холостого хода якоря с периодом не более суммарного времени рабочего и холостого хода. Последующие импульсы также подают в период холостого хода якоря с периодом не более суммарного времени рабочего и холостого хода.
На фиг. 1 изображена функциональная схема управления, на фиг. 2 графики тока обмотки и перемещения якоря.
Реализация управления по предлагаемому способу может быть наиболее просто осуществлена по функциональной схеме фиг. 1, включающей следующие функциональные узлы: 1 - источник питания постоянного или переменного тока; 2 - блок формирования управляющих импульсов рабочего хода с устройством их управления; 3 - линейный электромагнитный двигатель, содержащий обмотку 4, якорь 5 и возвратную пружину 6.
Работа функциональных узлов 2 и 3 синхронизирована по времени, т.е. время подачи напряжения на обмотку двигателя согласовано с движением якоря. Предлагаемая функциональная схема не исключает использования дополнительных узлов, например датчиков, для управления обмоткой по положению якоря.
Кривые 7 и 8 на фиг.2 - зависимости перемещения якоря и тока обмотки от времени при движении якоря с начальной нулевой скоростью; кривые 9 и 10 - зависимости перемещения якоря и тока обмотки от времени при движении якоря с начальной отрицательной скоростью.
Пример конкретного осуществления способа.
В начальный момент времени при отключенном источнике питания 1 якорь 5 двигателя 3 под действием усилия возвратной пружины 6 занимает крайнее верхнее положение, которое соответствует начальному воздушному рабочему зазору в магнитной цепи двигателя δн и неподвижен (фиг.1). При включении источника питания 1 на блок формирования управляющих импульсов 2 поступает напряжение. В обмотке 4 под действием приложенного напряжения появляется ток, обуславливающий возникновение в рабочем зазоре δн электромагнитной силы FЭМ. Одновременно с электромагнитной силой на якорь 5 действуют противоположно направленные силы трения и упругости пружины 6, благодаря чему в механической системе двигателя 3 сохраняется равновесие и якорь 5 остается неподвижным на время tmp1 (кривая 7). С нарастанием тока в обмотке 4 до значения imp1 (кривая 8) якорь 5 под действием электромагнитной силы начинает движение, преодолевая противодействие сил трения и упругости пружины. После втягивания якоря 5 в обмотку 4 за время tдв1 она обесточивается и якорь под действием упругих сил сжатой пружины начинает холостой ход в направлении, противоположном FЭМ. При возврате якоря в момент времени, соответствующий воздушному рабочему зазору δвкл (кривая 9), который может отличаться от начального δвкл/δн на обмотку, с блока формирования управляющих импульсов 2 поступает напряжение, вызывающее протекание тока по обмотке и возникновение в рабочем воздушном зазоре δвкл электромагнитного усилия FЭМ. Якорь 5, обладая некоторым запасом кинетической энергии, приобретенной под действием пружины, продолжает движение в направлении, противоположном усилию FЭМ, которое к этому моменту времени еще недостаточно велико для преодоления противодействующей силы за счет инерционности нарастания тока в обмотке двигателя. Движение якоря с отрицательной скоростью, увеличивающее рабочий воздушный зазор на интервале tmp2 обуславливает более интенсивное, чем в первом цикле, нарастание тока imp (кривая 10) за счет снижения индуктивности электромагнитной системы, а также за счет некоторого повышения питающего напряжения обмотки, наводимого движущимся против разворачивающегося магнитного поля ферромагнитным якорем ЭДС движения. При этом механическая энергия, запасенная пружиной во время рабочего хода якоря в предыдущем цикле, преобразуется частично в магнитную и передается в электрическую систему для использования в последующем цикле энергопреобразования. Через интервал времени tmp2 якорь под действием электромагнитной силы меняет свое направление движения на противоположное и ускоренно втягивается в обмотку за время tдв2, после чего протекание тока по обмотке прекращается. Якорь под действием упругих сил сжатой пружины совершает холостой ход. Далее цикл повторяется, а работа двигателя осуществляется в автоколебательном режиме.
Работа двигателя, при которой смена знака скорости якоря на противоположный совпадает с координатой положения якоря в точке δн, будет характеризоваться максимальной энергией удара. Регулируя момент подачи напряжения на обмотку двигателя, при возврате якоря, в пределах воздушного зазора 0 < δвкл/δн можно регулировать энергию удара двигателя в широких пределах с высоким КПД.
Сопоставление первого и последующих рабочих циклов (фиг. 2) показывает, что первый рабочий цикл характеризуется меньшим интервалом времени трогания tmp1 < tmp2 и током трогания imp1 < imp2, большим интервалом времени движения якоря tдв1 > tдв2. Увеличение времени трогания tmp2 позволяет повысить ток трогания imp2 и среднее значение тока обмотки, тем самым снизить время движения якоря за счет его ускоренного перемещения под действием большей электромагнитной силы. Это позволяет повысить предударную скорость якоря, увеличить ударную энергию и КПД в сравнении с известными устройствами при одинаковых массогабаритных показателях, а следовательно, и удельную энергию удара.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОМАГНИТНЫЙ УДАРНЫЙ ИНСТРУМЕНТ | 1995 |
|
RU2099175C1 |
| ЭЛЕКТРОМАГНИТНАЯ МАШИНА УДАРНОГО ДЕЙСТВИЯ | 1996 |
|
RU2111847C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ | 1995 |
|
RU2084071C1 |
| ЛИНЕЙНЫЙ ЭЛЕКТРОМАГНИТНЫЙ ДВИГАТЕЛЬ | 1993 |
|
RU2065659C1 |
| СПОСОБ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ В РЕЖИМЕ ВЫНУЖДЕННЫХ КОЛЕБАНИЙ (ВАРИАНТЫ) | 2008 |
|
RU2395889C2 |
| Способ питания электромагнитного двигателя возвратно-поступательного действия | 1982 |
|
SU1403327A1 |
| ЭЛЕКТРОМАГНИТНЫЙ ПРЕСС | 1993 |
|
RU2065360C1 |
| ЭЛЕКТРОПРИВОД УДАРНОГО ДЕЙСТВИЯ | 1992 |
|
RU2017319C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПРОЦЕССОМ РАЗРАБОТКИ НЕФТЕГАЗОКОНДЕНСАТНЫХ МЕСТОРОЖДЕНИЙ | 1992 |
|
RU2066740C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ПНЕВМОПРОБОЙНИКА В ГРУНТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
RU2009298C1 |

Изобретение относится к электротехнике и может быть использовано в устройствах ударного действия с линейным электромагнитным двигателем, в котором рабочий ход якоря осуществляется за счет единственной системы обмоток, а его возврат - под действием механического усилия, например под действием усилия возвратной пружины. Для увеличения удельной энергии удара при повышении КПД двигателя первый импульс напряжения подают в период рабочего хода якоря, а второй и последующие импульсы напряжения в период холостого хода с периодом не более суммарного времени рабочего и холостого хода, при этом импульс подают в момент времени, соответствующий воздушному зазору δвкл, при котором смена знака скорости якоря на противоположный происходит в точке с координатой положения якоря, равной начальному воздушному рабочему зазору δн, причем δвкл< δн. 2 ил.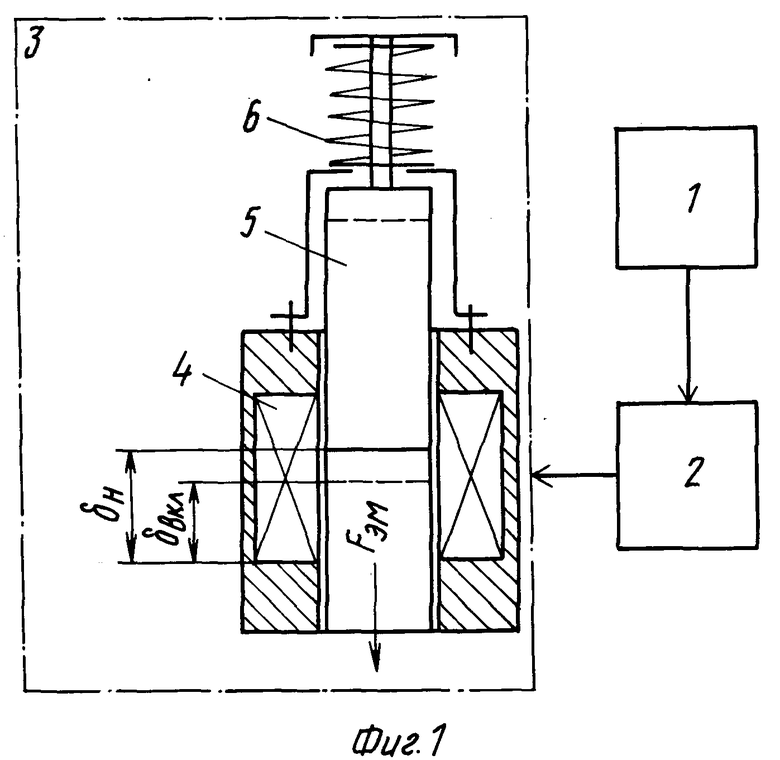
Способ управления однообмоточным линейным электромагнитным двигателем, включающий подачу импульса напряжения на обмотку двигателя в период холостого хода якоря и отключение его по завершении рабочего хода с периодом не более суммарного времени холостого и рабочего хода, отличающийся тем, что импульс напряжения подают в момент времени, соответствующий такому воздушному рабочему зазору δвкл, чтобы смена знака скорости якоря на противоположный происходила в точке с координатой положения якоря, равной начальному воздушному рабочему зазору δн, причем δвкл< δн.
| Ряшенцев Н.П | |||
| и др | |||
| Электромагнитные прессы | |||
| - Новосибирск, Наука, Сиб.отд-ние, 1989, с.99, 169 | |||
| Способ управления электромагнитным двигателем возвратно-поступательного движения | 1972 |
|
SU498703A1 |
| Способ управления электромагнитным двигателем возвратно-поступательного движения | 1987 |
|
SU1577064A1 |
| Способ питания электромагнитного двигателя возвратно-поступательного действия | 1982 |
|
SU1403327A1 |
| Запоминающее устройство | 1987 |
|
SU1425693A1 |
