Изобретение относится к области навигации, служит для оиределения местоположений подвижных объектов и предназначено преимущественно для Применения 1на речном флоте в целях автоматического получения в диспетчерском . 1пункте данных о местоположении судов, движущихся ПО контролируемому речному участку, а также может найти Применение для тех же целей на железнодорожном и автомобильном транспорте или в других случаях, где подвижные объекты перемещаются по известно.му протяженнОму пути.
Известны способы определения местоположения объектов радионави1гационными системами. С их ПОМОЩЬЮ подвижные объекты определяют свое местоположение, как точ1ку пересечения двух линий положения. Для -передачи полученных координат в диспетчерский пункт используют известные каналы связи. Наиболее близкой к предлагаемому способу является система «Радиапаутина. В ней четыре неподвижные станции создают на местности четыре (Перемещающиеся изофазы. Каждая пара изофаз образует вторич1ные линии положения, создающие по-чти прямоугольную сетку, ПО которой и определяют место объекта. Для стабильности положения этой сетки работу четырех станций жестко синхронизируют двумя дополнительными станциями скнХронизадии,
Другим способом определения местоположения объектов является распространенный импульсный метод (см.. например. Японский патент кл. 100С4, № 19499 от 7.XI.1963 г. Способ определения пасстояния яо движущегося вдоль железнояорожного пути объекта). Этим Способом вначале измеряют интервал времени между посылкой зондиоующего miпульса и достижением им объекта, а затем
определяют расстояние путем умножения этого времени на скорость оаспростоанения импульса. После этого местоположение объекта находят в точке пересечения дуги окружности радиусом, равным изме оенному расстоянию, с известным железнодорожным путем.
Определение лтестоположения объектов с :помоп1ью «Радиопаутины требует сооружения четырех основных станций ,для создания
двух линий положения и Пвух дополнительных станций ,для синхронизации работы основных, что сильно усложняет устройство и эксплуатацию системы. При определении местоположения объектов
импульсным методом используют в качестве коэффициента перевода временного интервала в расстояние скорость распространения импульсов, а вследствие того, что 0«а является большой Величиной, для получения небольявляются высокие требования к а-ппарату.ре измерения интервалов времени, а также к форме и крутизне фронтов зондирующих импульсов.
Предлагаемый способ устраняет эти недостатки за счет использования имеющейся на местности одной линии положения в виде известного пути следования объектов и образования второй линии положения, движущейся с ПОСТОЯННОЙ скоростью в результате импульсной работы двух станций на концах обслуживаемого участка без какого-либо согласования и синхронизации их совместной работы. При Применении этого способа используют в качестве коэффициента перевода временного интервала в расстояние скорость перемещения зоны совпадения импульсов, которая намного меньще скорости распросгранения самих импульсов, что при тех же аппаратурных ощибках приводит к уменьщению ошибок измерения расстояний.
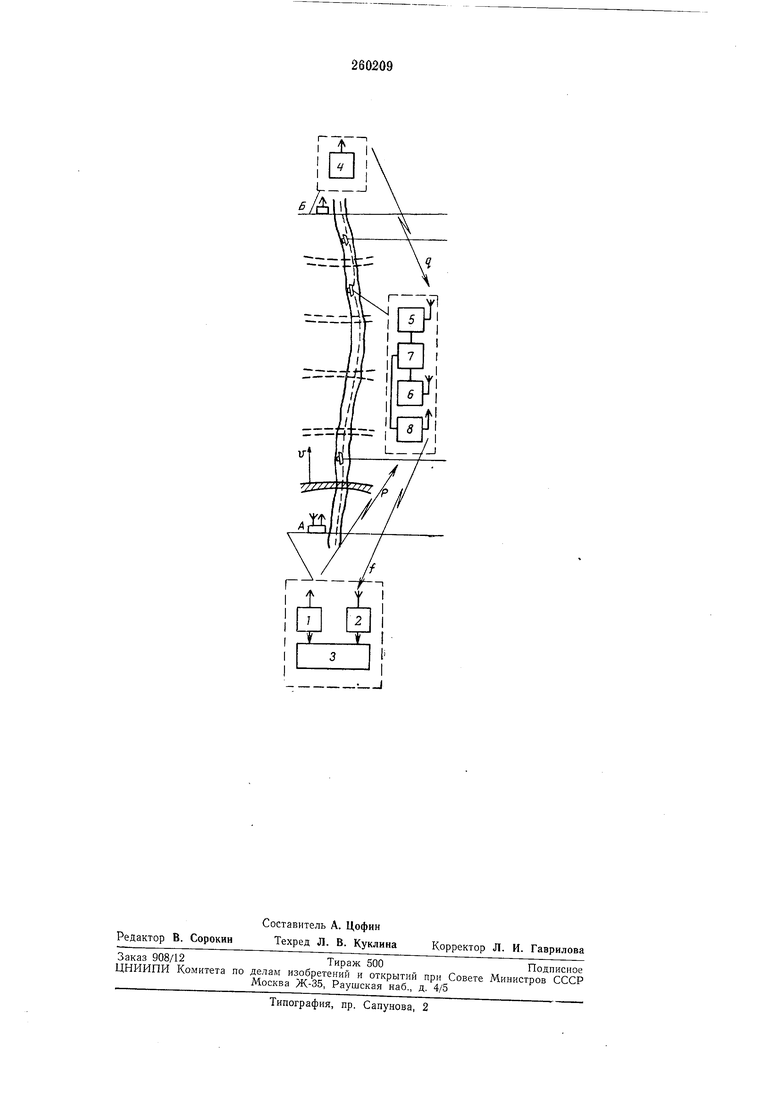
На чертеже изображена принципиальная схема осуществления описываемого способа, расположение и блок-схема работы аппаратуры применительно к определению местоположения судов на контролируемОМ участке водлого пути.
В пункте А, относительно которого определяют положения объектов, устанавливают станцию, состоящую из передатчика 1, приемника 2, блока синхронизации и измерения 5. В пункте Б ставят передатчик 4. Па подвижном объекте аппаратура состоит из приемников 5 И 6, блока синхронизации и измерения 7 и передатчика 8.
Определение местоположений подвижных объектов производят следующим образом. Пе|редатчики в пунктах Л и Б излучают импульсы с частотами повторения соответственно р и q, -которые образуют интерференционное импульсное поле. При этом импульсы совпадения, образующие поле, перемещаются со скоростью V.
Па ПОДВИЖНОМ объекте приемники принимают импульсы с частотой повторения соответственно р и q. Блок синхронизации измерения фиксирует их совпадение в момент пересечения зоной места объекта и открывает передатчик, который излучает ответный импульс на частоте f, отличной от несущей частоты импульсов р W. q. Приемник в пункте А принимает его, а блок синхронизации и измерения измеряет интервал времени между мО ментами прохождения зоны через пункт А и моментом получения ответного импульса с
объекта. Расстояние до объекта определяют умножением этого времени на скорость v. Место объекта находят в точке пересечения дуги окружности радиусом, равным измеренному расстоянию, с известным на местности
путем.
Предмет изобретения
Способ определения местоположения объекта, движущегося по известному пути, посредством измерения расстояния от одното из концов участка пути до объекта и занесения на карту дуги окружности с центрОМ в указанном -конце участка пути и радиусом, равным измеренному расстоянию, отличающийся тем, что, с целью повыщения точности измерения расстояния, на участке пути с помощью двух радиопередатчиков, излучающих импульсы с различной частотой и расположенных на
его концах, периодически создают интерференционное импульсное поле, измеряют время распространения зоны совпадения импульсов от одного ИЗ концов участка пути до объекта и определяют расстояние между ними путем
умножения измеренного времени на скорость распространения зоны.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ | 1973 |
|
SU364016A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНОГО ОБЪЕКТА | 1991 |
|
RU2018858C1 |
| СПОСОБ МНОГОПОЗИЦИОННОЙ БЛИЖНЕЙ РАДИОНАВИГАЦИИ | 2022 |
|
RU2792013C1 |
| СПОСОБ РАДИОНАВИГАЦИОННЫХ ИЗМЕРЕНИЙ В ИМПУЛЬСНО-ФАЗОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЕ | 1997 |
|
RU2115937C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО, РЕАЛИЗУЮЩЕЕ ЭТОТ СПОСОБ | 1993 |
|
RU2092902C1 |
| Помехоустойчивая разностно-дальномерная локальная радионавигационная система, комплексированная с инерциальной навигационной системой, обеспечивающая высокоточное позиционирование движущихся объектов | 2023 |
|
RU2802322C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ РАБОТАЮЩЕЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2010 |
|
RU2457505C2 |
| ВРЕМЕННОЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ СКАНИРУЮЩЕГО ИСТОЧНИКА РАДИОИЗЛУЧЕНИЯ | 2020 |
|
RU2742581C1 |
| Способ определения местоположения работающей РЛС пассивным многолучевым пеленгатором | 2019 |
|
RU2741333C1 |
| Способ навигации с использованием высокоточного абонентского терминала и высокоточный абонентский терминал | 2023 |
|
RU2832572C1 |