Изобретение относится к области летательных аппаратов, приводимых в действие мускульной энергией пилота на основе машущего крыла.
Известна защищенная патентом Франции N 2620679 от 22 сентября 1987 г. конструкция махолета, состоящая из корпуса и шарнирно закрепленных на нем полужестких крыльев с возможностью фиксации их при взлете. Пилот, неся всю конструкцию на себе, разгоняется до скорости, способной создать подъемную силу, равную весу пилота с конструкцией, потом поджимает ноги, ставит их на рычаги, связанные с крыльями, деблокирует крылья и производит машущие усилия, при этом используются пружины, связанные с крыльями и пилотом, пилот оказывается как бы подвешенным на пружинах к крыльям. Такая конструкция делает весьма проблематичным сам процесс взлета, ибо энергетические возможности человека весьма ограничены, а связь вес пилота - крыло создает неустойчивые условия реального полета.
Учитывая то, что человек освоил планирующий полет на дельтаплане, а желание освоить свободный полет за счет собственных мускульных усилий никогда не покидало человека, предлагается новая конструкция махолета.
Особенностью конструкции является создание в паре с пилотом механической резонансной системы, которая, как известно из техники, является самой экономичной с точки зрения потребления энергии, то есть КПД резонансной системы при прочих равных условиях максимально возможный.
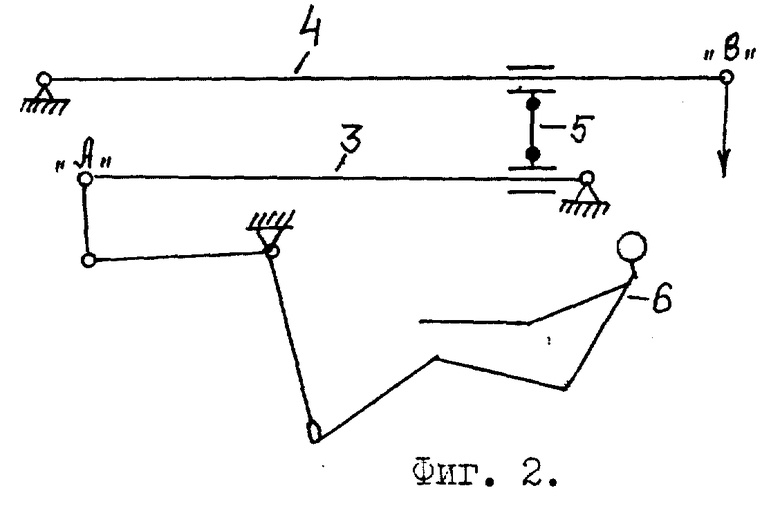
Реализуется вышеуказанное условие путем соединения полужесткого шарнирно на корпусе крыла 1 (фиг. 1) между двумя пружинами 2, что создает осциллятор, частота которого практически не зависит от его пространственного положения, при условии использования в качестве пружины торсиона можно отказаться от шарнирного крепления крыла к корпусу.
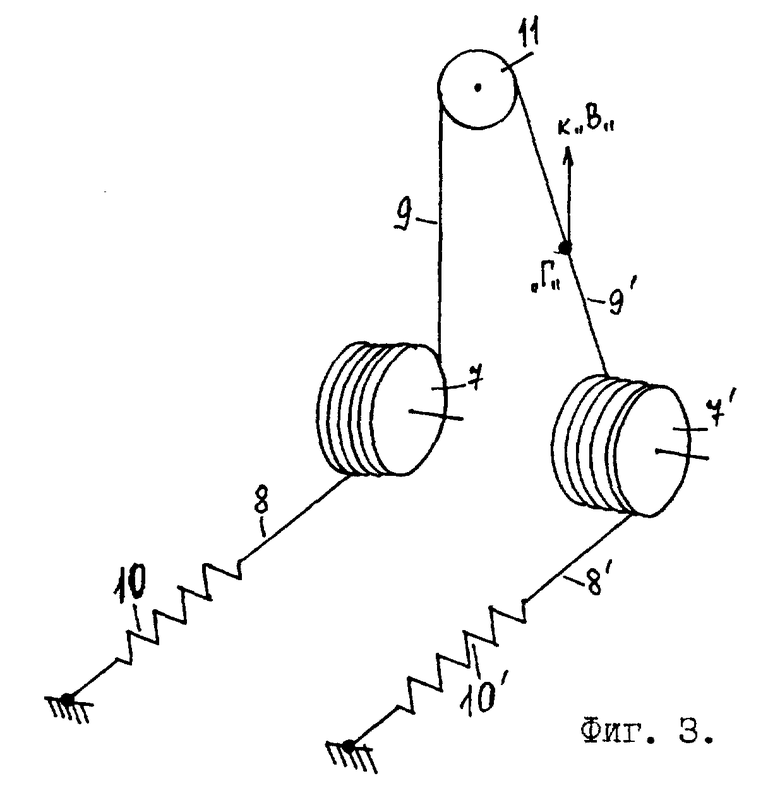
Так как при реализации полета во время раскачки осциллятора, взлета и собственно полета есть необходимость усилия на крыло и его амплитуду, предлагается устройство передачи мускульного усилия пилота на крыло, состоящее из двух параллельно расположенных рычагов 3 и 4 (фиг. 2), имеющих опоры с противоположных концов и соединенных между собой шатуном 5, на концах которого закреплены ползуны. Мускульное усилие от пилота прилагается к свободному концу рычага 3 в точке "A", со второго свободного конца рычага 4 в точке "B" усилие посредством передающего звена в виде штанги или тросика передается на крылья. Передвигая шатун вдоль рычагов, можно в очень широких пределах изменять усилие на крыло и амплитуду колебаний крыла при неизменной мощности мускульного усилия. Коэффициент изменения усилия и амплитуды не менеe ста, а КПД около 98%.
Принципиально возможны два варианта установки механизма передачи мускульного усилия на крыло. Первый - вдоль корпуса с дополнительными элементами связи штанг, рычагов или тросиков, при этом используется один механизм передачи, и второй - с расположением двух механизмов вдоль оси крыла, но связанных между собой с целью синхронизации воздействия на крылья. Преимущества вариантов могут быть определены только для конкретной отдельно взятой конструкции.
Реализация взлета и посадки в прототипе при помощи ног пилота, безусловно, не может удовлетворить предлагаемую конструкцию махолета, а возможность накапливать предвзлетную энергию в осцилляторе и экономно расходовать мускульную энергию во время полета позволяет использовать шасси, к тому же использование шасси значительно повышает безопасность пилота во время взлета и особенно при посадке.
При взлете рационально мускульную энергию распределить, направив часть ее на раскачку осциллятора крыльев, а часть на разгон махолета передав ее на колеса шасси. Преследуя цель снижения потерь при передаче энергии, предлагается устройство, состоящее из двух барабанов с храповыми механизмами 7 (фиг. 3), установленных на колесах шасси, на барабаны одним концом жестко закреплены и навиты в противоположных направлениях две гибкие ленты 8 (8') и 9 (9'). Свободные концы ленты 8 (8') соединяются с возвратными пружинами 10 (10'), свободные концы ленты 9 (9') соединяются между собой через паразитный шкив 11, а мускульное усилие от рычага 4 (фиг. 2, точка "B") передается на ленту 9 (9') в точке "Г", расположенной между барабаном 7 и паразитным шкивом 11 в любом удовлетворяющем реальную конструкцию месте. Таким образом, реализуется еще одна механическая колебательная система, частота собственных колебаний которой зависит от жесткости возвратных пружин 10 и массы (момента инерции) всех элементов передачи. Жесткость пружин выбирается такой, чтобы частота собственных колебаний равнялась частоте собственных колебаний системы крыла. После взлета привод на колеса отключается.
Все элементы конструкции махолета выполняются из материалов, обладающих минимальным весом при достаточной прочности.
Реализация вышеизложенных условий позволяет создать легкую конструкцию с минимальной диссипацией энергии, что равнозначно с максимально возможным КПД.
Учитывая эргономические возможности человека, пилот должен находиться в полулежачем положении с упором для плеч, а педали рычагов на линии, близкой к линии оптимального приложения усилия. В случае несовпадения наиболее эффективной частоты взмаха крыльев с оптимальной частотой сокращения мышц ног пилота возможна установка преобразующего элемента в виде, например, цепной передачи. Если по эргономическим соображениям будет рациональнеe использовать попеременное усилие левой и правой ноги, то необходимо будет установить кривошип с педалями. Следует отметить, что в случае необходимости относительно легко можно будет изменять собственную частоту колебаний крыльев за счет изменения жесткости пружин 2 (фиг. 1).
Приведенные кинематические схемы на фиг. 1, 2, 3 представляют один из возможных вариантов компоновки.
Пилот 6 (фиг. 2), заняв положение в кабине, переводит шатун 5 в крайнее правое положение, вводит в зацепление механизм передачи усилия на колеса и начинает раскачку крыльев и одновременный разгон махолета. По мере увеличения амплитуды шатун 5 передвигается постепенно на левую сторону до отрыва махолета от земли, после чего механизм привода на колеса отключается. Дальнейший полет регулируется за счет изменения мускульного усилия и изменения положения шатуна 5. Для реализации режима свободного планирования шатун 5 переводится в крайнее правое положение.
Следует отметить, что используемые в конструкции махолета устройства могут быть использованы при конструировании других машин, что повысит их КПД и позволит производить регулировку режимов в широких пределах. Одной из таких машин может быть веломобиль.
| название | год | авторы | номер документа |
|---|---|---|---|
| Динамический инерционный махолет (ДИМа) | 2021 |
|
RU2779547C1 |
| МУСКУЛЬНЫЙ ПЛАВАЮЩИЙ МАХОЛЕТ "ЛЕБЕДУШКА" | 2004 |
|
RU2304546C2 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| БИОАЭРОДИНАМИЧЕСКИЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ С МАШУЩИМИ КРЫЛЬЯМИ | 2009 |
|
RU2392189C1 |
| МАХОЛЕТ | 2003 |
|
RU2255026C2 |
| МАХОЛЕТ СО СБАЛАНСИРОВАННЫМИ КРЫЛЬЯМИ | 1999 |
|
RU2156209C1 |
| МАХОЛЕТ | 1995 |
|
RU2081033C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2480378C1 |
Махолет, приводимый в действие мускульной энергией человека, содержит корпус, полужесткие крылья, колеса, мускульный привод для передачи усилия на указанные крылья и колеса, состоящий из рычагов, храпового механизма для передачи усилия на колеса, возвратных пружин, один конец которых закреплен на корпусе, и передающего звена, предназначенного для соединения указанного привода с крыльями. Он снабжен двумя барабанами, двумя гибкими лентами, паразитным шкивом, указанный храповой механизм состоит из двух частей, которые соответственно расположены в первом и втором барабанах, указанный мускульный привод состоит из параллельных рычагов, имеющих опоры с разных концов, и ползуна, связывающего между собой оба указанных рычага и установленного с возможностью перемещения вдоль этих рычагов, конец одного из рычагов соединен с указанным передающим звеном для приложения мускульного усилия к крыльям с образованием механической резонансной системы. Изобретение направлено на решение задачи осуществления машущего полета за счет собственных мускульных усилий человека. 3 ил.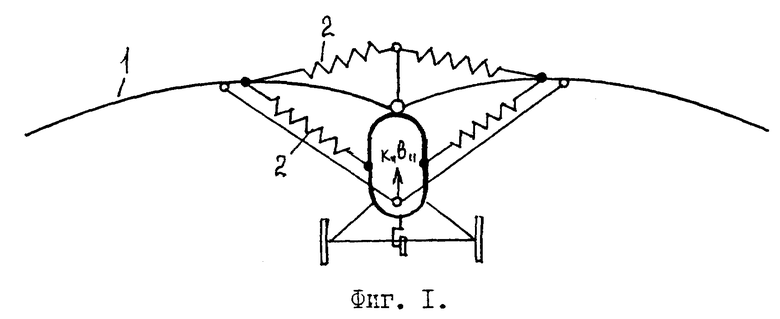
Махолет, приводимый в действие мускульной энергией человека, содержащий корпус, полужесткие крылья, колеса, мускульный привод для передачи усилия на указанные крылья и колеса, состоящий из рычагов, храпового механизма для передачи усилия на колеса, возвратных пружин, один конец которых закреплен на корпусе, и передающего звена, предназначенного для соединения указанного привода с крыльями, отличающийся тем, что он снабжен двумя барабанами, двумя гибкими лентами, паразитным шкивом, указанный храповой механизм состоит из двух частей, которые соответственно расположены в первом и втором барабанах, указанный мускульный привод состоит из двух параллельных рычагов, имеющих опоры с разных концов, и ползуна, связывающего между собой оба указанных рычага и установленного с возможностью перемещения вдоль этих рычагов, конец одного из рычагов соединен с указанным передающим звеном для приложения мускульного усилия к крыльям с образованием механической резонансной системы, каждая гибкая лента навита на один из барабанов и закреплена на нем, при этом указанные ленты навиты на барабаны в противоположных направлениях, первый конец первой ленты соединен со свободным концом первой возвратной пружины, первый
конец второй ленты соединен со свободным концом второй возвратной пружины, второй свободный конец первой ленты через указанный паразитный шкив соединен с вторым свободным концом второй ленты с возможностью приложения мускульного усилия для создания возвратно-поступательного движения к одной из лент в точке, расположенной в средней части между указанным паразитным шкивом и одним из указанных барабанов.
| СПОСОБ ВЫПЛАВКИ ВАНАДИЙСОДЕРЖАЩИХ СТАЛЕЙ И СПЛАВОВ | 1999 |
|
RU2144089C1 |
| RU 94027645 A1, 27.09.96 | |||
| 0 |
|
SU170305A1 | |
