Изобретение динамического инерционного махолета (ДИМа) относится к области летательных аппаратов, приводимых в действие мускульной энергией пилота на основе машущего клапанного крыла.
Известна защищенная патентом Франции N 2620679 от 22 сентября 1987 г. конструкция махолета, состоящая из корпуса и шарнирно закрепленных на нем полужестких крыльев с возможностью фиксации их при взлете. Пилот, неся всю конструкцию на себе, разгоняется до скорости, способной создать подъемную силу, равную весу пилота с конструкцией, потом поджимает ноги, ставит их на рычаги, связанные с крыльями, деблокирует крылья и производит машущие усилия, при этом используются пружины, связанные с крыльями и пилотом, пилот оказывается подвешенным на пружинах к крыльям. Такая конструкция делает весьма проблематичным процесс взлета, ибо энергетические возможности человека весьма ограничены, а связь вес пилота - крыло создает неустойчивые условия реального полета.
Известна конструкция махолета по патенту РФ №2129076, приводимая в действие мускульной энергией человека содержащая: корпус, полужесткие крылья с колесами, мускульный привод, рычаги, храповой механизм, возвратные пружины, один конец которых закреплен на корпусе, и передающего звена, предназначенного для соединения указанного привода с крыльями. Махолет снабжен двумя барабанами, двумя гибкими лентами, паразитным шкивом. Храповой механизм выполнен из двух частей, которые расположены в двух барабанах. Мускульный привод состоит из параллельных рычагов, имеющих опоры с разных концов, и ползуна, связывающего между собой оба указанных рычага и установленного с возможностью перемещения вдоль этих рычагов, конец одного из рычагов соединен с указанным передающим звеном для приложения мускульного усилия к крыльям с образованием механической резонансной системы. Описанная конструкция мускульного махолета по патенту РФ №2129076 сложна и содержит неприемлемое количество узлов и механизмов, повышающих паразитный вес конструкции махолета. Она не позволяет использовать динамически всю массу пилота для создания подъемной силы машущим клапанным крылом. Приведенная в аналоге схема махолета небезопасна в части приземления махолета и требует от пилота навыков и умения безопасно управлять посадкой прототипа.
Ближайшим по изобретательскому замыслу к предлагаемому техническому решению «Динамического инерционного махолета» (ДИМа) является патент РФ №2624758 «Орнитоптер инерционный». Орнитоптер имеет крылья, посадочное место для пилота, хвостовое оперение, содержит раскачивающее устройство для раскачивания пилота в вертикальном направлении относительно плоскости крыльев, создания сил инерции, воздействующих на аппарат в направлении вверх и вниз попеременно. Масса аппарата без пилота и груза имеет величину, достаточно малую в сравнении с массой раскачивающихся пилота или груза. Этим обеспечивается возможность орнитоптера взлетать и набирать высоту при раскачивании пилота или груза. В предлагаемом в качестве прототипа техническом решении используется инерционное раскачивание ЛА, в отличии от динамического безопасного прыжка пилота вниз и перехвата его в падении фалами предлагаемого в качестве изобретения «Динамического инерционного махолета» ДИМа. Прыжок с последующим безопасным перехватом и подъем по лестнице для следующего прыжка и взмаха крыльев ДИМа обеспечивает значительно превосходящий по величине динамический коэф., передаваемый на крылья махолета в сравнении с прототипом. ЛА предложенный в качестве прототипа имеет хвостовое оперение, что ставит направление его полета в зависимость от ветра. Груз увеличивает вес прототипа.
Возможность свободно и безопасно взлетать за счет собственных мускульных усилий, парить на сколь угодно дальние расстояния и безопасно приземляться представляет конструкция махолета описанная в предлагаемом техническом решении: «Динамический инерционный махолет» (ДИМа).
Особенностью конструкции является создание в паре с пилотом машущей динамической системы, которая, позволяет в сравнении со всеми известными техническими решениями мускульных махолетов орнитоптеров, использовать инерцию падающего тела пилота.
Применение массы падающего тела пилота для динамического наполнения крыльев воздухом, является самым эффективным способом использования энергии, накопленной пилотом в результате его статичного подъема по лестнице. То есть, КПД динамической инерционной системы махолет-пилот максималеный из возможных, при наборе высоты мускульными летательными аппаратами в атмосфере.
Целью предлагаемого технического решения динамического инерционного махолета является использования динамического инерционного воздействия массы пилота на подкрыльевой воздух. Указанная цель достигается подъемом по лестнице и последующим прыжком пилота с высоты верхней ступени, перехватом сиденья с пилотом фалами и передачей накопленной инерции, через продольный телескопический стержень, рамки машущему клапанному крылу ДИМа.
На Фиг. 1 показана аксонометрия динамического инерционного махолета (ДИМа), на Фиг. 2 показано предстартовое положение пилота и махолета. На Фиг. 2 поз.1, проиллюстрирована возможность самостоятельного старта махолета ДИМа, предварительно заякоренного за грунтозацеп 18. На поз. 2 показан взлет махолета ДИМа с использованием вспомогательных разгонных устройств присоединенных к буксирному крючку 23.
Реализуется вышеуказанная цель следующим образом. В двусторонний телескопический стержень 1, через отверстия в «Г»-образной консоли 2, заведена лестница 3, которая эксцентрично передает вес пилота 4 на клапанное крыло 5. В связи, с чем вес пилота 4, находится под точкой, проходящей через центр пересечения диагоналей клапанного крыла 5. Что в свою очередь удерживает лестницу 3, под весом перемещающегося вверх по ней пилота 4 в вертикальном положении. К нижней оконечности лестницы 3, прикреплены колеса 6. К двустороннему телескопическому стержню 1, на равном расстоянии, жестко, с возможностью демонтажа, прикреплены съемные рамки 7, концы которых для удержания геометрии, стянуты прочным шнуром 8. К лучам 9, крайних съемных рамок 7, клапанного крыла 5, присоединены дополнительные колеса 10. К двустороннему, телескопическому стержню 1, слева и справа от лестницы 3, крепятся гибкие фалы 11, соединенные с сиденьем пилота 12, оборудованным ремнями безопасности 13. Машущие клапанные крылья 5 состоят: из легкого, прочного, гибкого двустороннего телескопического стержня 1 (по аналогии с карбоновым телескопическим удилищем), насаженных через равные расстояния и жестко закрепленных к нему съемных рамок 7, с лучами 9, обтянутыми прочным шнуром 8, на нижнюю проекцию которых, опирается легкое, тканное, синтетическое покрытие 14. (по аналогии с парашютным шелком). По длине покрытия 14, на равных расстояниях выполнены клапана 15. Для ограничения движения оконечностей двустороннего телескопического стержня 1, вверх - при взмахе и планировании биосистемы пилот-ДИМа, к нему крепятся растяжки 16, соединенные с левой и правой стойкой лестницы 3. Продольный телескопический стержень 1, заводится в отверстия 17, выполненные в оконечности «Г»-образных консолей лестницы 3, образуя шарнир малых угловых перемещений 18, который позволяет лестнице 3, качаться в малом угле, относительно двустороннего телескопического стержня 1, с рамками 7, тканевым покрытием 14, клапанными крыльями 5. В поперечном сечении угловые качания клапанных крыльев 5, относительно лестницы 3, ограничивают растяжки с плечами регулируемой длины 19, которые заведены за ролики 25, закрепленные за пределами вертикальных стоек лестницы 3. Растяжки регулируемой длины верхними концами крепятся к лучам съемных рамок 5, а нижние их части заводятся за ролики 25, выше которых к ним закреплен мостик ограничения угловых перемещений 26, клапанного крыла 5. Пилот 4, укомплектован специальной обувью 21, предназначенные для удержания ног пилота при подъеме по ступеням лестницы 3. Все элементы лестницы 3 и клапанного крыла 5 выполнены из легкого диэлектрика и металла покрытого изоляционным материалом 22. К середине нижней ступеньки лестницы 3, крепится буксирный крючок 23. Как вариант можно использовать конструктивные элементы динамического инерционного махолета, например лестницу 2 с сиденьем 12 и гибкими фалами 11 вкупе с крылом параплана, соединив их при помощи траверсы, являющейся центральной частью двустороннего телескопического стержня 1, динамического инерционного махолета.
Взлет инерциоида возможен двумя способами. Без буксировки, Фиг. 1. поз. I. и с буксировочными средствами, Рис. 1 поз. II. Совершает взлет и полет без буксировки биомеханическая система ДИМа-пилот следующим образом (Фиг. 1) На ровной площадке производят выгрузку составляющих ДИМа, которые в походном положении занимают объем не более 1,5 м3. Сборку компонентов выполняют в следующем порядке: распускают двусторонний телескопический стержень, жестко крепят его выдвижные узлы, заводят телескопический стержень 1 в отверстия 17 «Г»-образной консоли 2, через отверстия в основаниях, поочередно, съемные рамки 7, с двух сторон надевают на оконечности распущенного телескопического стержня 1 и крепят к нему с равным шагом. Присоединяют к ДИМа гибкие фалы 11, сиденье пилота 12, продольные и поперечны растяжки 16, 8, растяжки с плечами регулируемой длины 19 и тканевое покрытие 14.
Самостоятельный, безопасный взлет и полет инерциоида возможен при наличии легкого, слабого ветра. Лестницу 3, смонтированного ММИ с опорой на колеса 6 и площадку взлета, размещают по направлению ветра. При этом клапанные крылья 5 располагаются с опорой, через дополнительные колеса 10 на площадку взлета. Нижняя ступенька лестницы 3, с колесами 6, временно удерживается за любое возможное препятствие или штатное средство, на поверхности площадки взлета. Пилот, при помощи ремней безопасности 13, присоединяет сиденье 12 к пятой точке, застегивает ремни безопасности 13 на груди и становится на нижнюю ступеньку лестницы 3 лицом к клапанному крылу 5, опирающемуся на дополнительные колеса 10. Лестница 3, мускульного машущего динамического инерциоида перед стартом на площадке взлета располагается под острым углом к горизонту с опорой на два колеса 6 и два колеса 10, установленных на лучах 9, крайних съемных рамок 7. После набора воздуха клапанными крыльями 5 и появления тянущего усилия от ветра, нижняя оконечность лестницы 2, освобождаются от удержания от площадки старта и мускульная биосистема ЛА пилот-ДИМа, на двух парах колес 6 и 10 начинает разбег. Далее, пилот натягивает и укорачивает гибкие фалы 11, закрепленные к телескопическим стержням 1, и подтягивая их на себя отрывает от земли клапанные крылья 5. Происходит изменение угла наклона лестницы 2 к площадке старта. Пилот, после набора ММИ достаточной скорости под воздействием ветра, отпускает гибкие фалы 11, и совершает резкий рывок лестницы 3 на себя, до принятия ей вертикального положения. После чего вместе с сиденьем 12, быстро поднимается по ступенькам лестницы 2, до выхода головы за плоскость покрытия машущих клапанных крыльев 5, в отверстие 20, выполненное в нем. Вес поднимающегося по лестнице пилота воспринимает клапанное крыло 5, а лестница на колесах 6 из вертикального положения переходит в наклонное. Подъем пилота по лестнице 2, вызывает ответную реакцию клапанного крыла 5, происходит первый взмах. В начальный момент совершения первого взмаха, колеса 6 катятся по земле, независимо от перемещения пилота по лестнице, давая возможность пилоту подниматься по ней. При этом лестница с вертикального положения меняет угол наклона к площадке взлета по мере подъема пилота по ней. Угол лестницы 2, к площадке старта, в ходе первых взмахов изменяется с острого на вертикальный и наоборот. К моменту завершения первого, второго или третьего взмаха, колеса 6 отрывается от земли. Каждый последующий взмах сопровождается подъемом пилота по лестнице 2 и его прыжком на гибких фалах 11 вниз. Быстрый подъем пилота 4, по лестнице 2 и последующий его прыжок назад, до удержания его массы сиденьем 12 способствует передаче инерции падающего тела через гибкие фалы 11, на клапанные крылья 5, вызывая взмах.
Взлет ДИМа возможен при помощи вспомогательных буксировочных средств, поз. 2 Фиг. 2. Например: усилием вспомогательного персонала, натягом и резким отпуском стартовых резиновых жгутов, автомобилем. В этом случае разгон ДИМа осуществляется в любом направлении при слабом ветре или в безветренную погоду. Пилот располагается на нижней ступени лестницы 2, с опорой на колеса 6, 10, по аналогии самостоятельному взлету без средств буксировки Поз. 1 Рис. 2. В случае взлета с применением вспомогательных средств, последние, присоединяются к буксирному крючку 23, в этом случае биосистема пилот-ДИМа сразу выходят на траекторию набора высоты, с отрывом колес 6 и 10 от взлетной площадки. Совершая прыжки и подъемы по лестнице биомеханическая система пилот-ДИМа набирает приемлемую для планирования высоту после чего пилот, расположившись в сиденье 12 и держась за стойки или нижние ступени лестницы 2, может совершать планирующий полет без затрат энергии. При наличии «термиков» биосистема ММИ-пилот будет иметь возможность парить по аналогии с полетами параплана. Пилот 4 находится в постоянной готовности быстро подняться по лестнице 3 и совершить безопасный прыжок, соответственно выполнить взмах клапанными крыльями 5. В ходе свободного прямолинейного планирования пилот 4, свой вес равномерно распределяет на левые и правые гибкие фалы 11, через сиденье 12. Для управления направлением полета пилот, подтянув левый или правый фалы с опорой на левую или правую часть ступени лестницы 3, перемещает часть своей массы на левое или правое клапанное крыло 5. Направлением полета можно управлять, потянув, левую или правую растяжку 16 клапанного крыла 5. При необходимости пилот может ускорить или замедлить приземление, придав приемлемый угол лестнице по направлению полета в пределах допуска шарнира 18, клапанного крыла 5. Для этого пилот поднимается на срединную часть лестницы и изменяет длины плеч растяжек 19, заводя их за крючки 24, расположенные за пределами стоек лестницы 3, а сам при этом висит на гибких фалах 11 и сиденье пилота 12, удерживая руками лестницу 3. Приземление пилота происходит по направлению полета на колеса 6, лестницы 3. Небольшой угол поворота плоскости клапанного крыла 5, относительно отверстий в «Г»-образной консоли 17, шарнира 18 позволяет пилоту отрегулировать сиденье пилота 12, на гибких фалах 11. В этом случае масса пилота зависает вертикально под срединной точкой площади покрытия 14, клапанного крыла 5. Клапанное крыло 5, благодаря шарниру 18 при полете удерживается воздухом в горизонтальном положении, а лестница свободно, на некоторый угол, отклоняется от вертикали. Пилоту 4, для продолжения полета и очередного взмаха, необходимо свой вес с сиденья 12 перенести на лестницу 2, которая в этот момент расположена в контр угле, и за счет шарнирного соединения 18, лестницы 2, с клапанным крылом 5, она приобретает вертикальное положение. Шарнирное соединение 18, двустороннего телескопического стержня 1 с клапанным крылом 5 и «Г»-образная консоль лестницы 3, позволяют в ходе полета ДИМа, при совершения взмахов, удерживать плоскость клапанного крыла 5 горизонтально, в то время, как лестница 2, под воздействием веса пилота 4 совершает колебательные движения с небольшим отклонением от вертикали. Для свободного полета в восходящих потоках воздуха, без взмахов, пилот имеет возможность укоротить гибкие фалы 11, сиденья 12, зацепив их за крючки 24, закрепленные к внешней стороне вертикальных стоек лестницы 3.
В момент прыжка пилота биомеханическая система пилот-ДИМа временно разделяется на две самостоятельные части. Временное снятие нагрузки с клапанного крыла 5, вызывает ответную реакцию и ранее накопленное под клапанным крылом давление воздуха поднимает ММИ с лестницей вверх. Пилот при этом летит в свободном падении вниз. При движении клапанного крыла вверх крыльевые клапана 15 временно открываются и перепускают воздух под крыло. Далее прыжок пилота тормозится сиденьем, фалами и крылом ММИ. Клапана закрываются, происходит набор давления под крылом махолета и по мере подъема пилота по лестнице вверх происходит очередной взмах крыльев ММИ. Соединение его основных конструктивных элементов; центральной серединной секции двустороннего телескопического стержня, лестницы, сиденья пилота и гибких фалов с крылом параплана позволяет использовать параплан, в качестве машущего инерционного мускулолета.
Экономический эффект от использования биомеханической системы пилот-ДИМа может составить десятки миллионов рублей.
ТЕРМИНЫ
1. Двусторонний телескопический стержень.
2. «Г»-образная консоль.
3. Лестница.
4. Пилот.
5. Клапанное крыло.
6. Колеса.
7. Съемные рамки.
8. Шнур из стекловолокна.
9. Лучи рамки.
10. Дополнительные колеса.
11. Гибкие фалы.
12. Сиденье пилота.
13. Ремни безопасности.
14. Тканевое покрытие машущего клапанного крыла.
15. Крыльевые клапана.
16. Растяжки.
17. Отверстия в «Г»-образных консолях.
18. Шарнир малых угловых перемещений.
19. Растяжки с плечами регулируемой длины.
20. Окно для контроля системы ММДИ в покрытии клапанного крыла.
21. Спец. обувь.
22. Диэлектрическое покрытие лестницы.
23. Буксирный крюк.
24. Крючки в стойках лестницы.
25. Ролики.
26. Ограничительный мостик.
| название | год | авторы | номер документа |
|---|---|---|---|
| МУСКУЛЬНЫЙ ПЛАВАЮЩИЙ МАХОЛЕТ "ЛЕБЕДУШКА" | 2004 |
|
RU2304546C2 |
| МАХОЛЕТ | 1996 |
|
RU2129076C1 |
| УСТРОЙСТВО ЭКРАННОЙ СЕТЕВОЙ ЗАЩИТЫ ЛЕТАТЕЛЬНОГО АППАРАТА | 2023 |
|
RU2815562C1 |
| МАХОЛЕТ СО СБАЛАНСИРОВАННЫМИ КРЫЛЬЯМИ | 1999 |
|
RU2156209C1 |
| МАХОЛЕТ | 2006 |
|
RU2323129C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ДВИЖИТЕЛЕМ В ВИДЕ МАШУЩИХ КРЫЛЬЕВ | 2002 |
|
RU2217355C1 |
| МАХОЛЕТ | 2010 |
|
RU2451623C1 |
| МАХОЛЕТ | 2016 |
|
RU2659357C2 |
| СПОСОБ ПРИВЕДЕНИЯ В ДВИЖЕНИЕ МАШУЩИХ КРЫЛЬЕВ МАХОЛЕТА И МАХОЛЕТ | 2010 |
|
RU2450954C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2011 |
|
RU2480378C1 |

Изобретение относится к области авиации, в частности к конструкциям махолетов. Динамический инерционный махолет (ДИМа), приводимый в действие мускульной энергией человека, имеет крылья, посадочное место для пилота, содержит устройство для перемещения пилота в вертикальном направлении относительно плоскости крыльев для создания статических сил инерции, воздействующих на аппарат в направлении вверх и вниз попеременно. Махолет состоит из двустороннего телескопического стержня, клапанных крыльев, прямоугольной, овальной или иной формы, с колесами на оконечностях, лестницы с колесами в нижней части, шарнирного узла крепления лестницы к двустороннему телескопическому стержню, сиденья пилота с ремнями безопасности, двумя прочными гибкими фалами, растяжек с плечами регулируемой и нерегулируемой длины, выполненных из прочного легкого шнура. Обеспечивается увеличение КПД системы махолет-пилот. 6 з.п. ф-лы, 2 ил.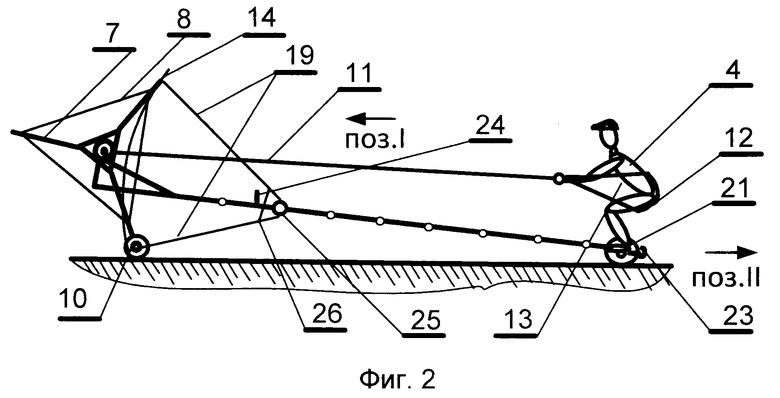
1. Динамический инерционный махолет (ДИМа), приводимый в движение мускульной энергией человека, состоящий из крыльев, посадочного места пилота, устройства для перемещения пилота относительно плоскости крыльев в вертикальном направлении, отличающийся тем, что содержит двусторонний телескопический стержень, клапанные крылья с колесами на оконечностях, лестницу с колесами в нижней части, шарнирные узлы малых угловых перемещений в соединении лестницы с двусторонним телескопическим стержнем, сиденье пилота с ремнями безопасности и двумя прочными гибкими фалами, две пары растяжек с плечами регулируемой и нерегулируемой длины, выполненных из прочного легкого шнура.
2. Динамический инерционный махолет по п. 1, отличающийся тем, что на двусторонний телескопический стержень с равным шагом надеты съемные рамки с лучами, обтянутыми легким прочным шнуром, к двум нижним оконечностям которых крепится тканевое покрытие машущего клапанного крыла из легкого прочного тканевого материала с крыльевыми клапанами, открываемыми при движении покрытия вверх и закрываемыми при движении вниз.
3. Динамический инерционный махолет по п. 1, отличающийся тем, что покрытие клапанных крыльев крепится к нижним оконечностям лучей съемных рамок с опорой на шнуры, стягивающие эти лучи по оконечностям, а по периметру само покрытие обтянуто легким прочным шнуром.
4. Динамический инерционный махолет по п. 1, отличающийся тем, что лестница, в верхней части, имеет Г-образные консольные окончания с отверстиями, в которые свободно заводится двусторонний телескопический стержень, образующий с Г-образной консолью два шарнира малых угловых перемещений, угол в котором, относительно телескопического стержня и лестницы, задает пара растяжек с плечами регулируемой длины.
5. Динамический инерционный махолет по п. 1, отличающийся тем, что две растяжки с плечами регулируемой длины верхними концами крепятся к нижним оконечностям лучей двух пар съемных рамок, ближних к шарнирным узлам, а их нижние плечи заводятся в ручьи двух роликов и в два мостика ограничения угловых перемещений машущего клапанного крыла, закрепленных с наружной стороны левой и правой стоек лестницы.
6. Динамический инерционный махолет по п. 1, отличающийся тем, что две растяжки в нижней части крепятся к левой и правой стойкам лестницы ниже регулируемых растяжек, а верхней частью крепятся к телескопическому стержню ближе к оконечностям машущих клапанных крыльев.
7. Динамический инерционный махолет по п. 1, отличающийся тем, что верхние концы двух гибких фалов симметрично - слева и справа относительно лестницы между креплением растяжек и растяжек регулируемой длины крепятся к телескопическому стержню, а их нижние концы закреплены к сиденью пилота, которое в свою очередь крепится к телу пилота при помощи ремней безопасности.
| ОРНИТОПТЕР ИНЕРЦИОННЫЙ | 2015 |
|
RU2624758C2 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1999 |
|
RU2178758C2 |
| Устройство для измерения характеристик оптических систем | 1977 |
|
SU711410A1 |
| CN 105129085 B, 24.08.2016 | |||
| RU 2001840 C1, 30.10.1993 | |||
| Способ утилизации отходов алюмохромового катализатора | 2015 |
|
RU2620679C1 |

