Изобретение относится к измерительным приборам, в частности, к измерителям угловой скорости, и может быть использовано как датчик абсолютной угловой скорости объекта.
Известны датчики угловых скоростей, которые построены на основе использования гироскопического эффекта и позволяют измерять абсолютную угловую скорость (1 - Назаров Б.И., Булатов В.В. и др. «Командно-измерительные приборы», МО СССР 1987 г., 639 с.). Недостатками данных устройств являются сложность конструкции и погрешности, обусловленные ее сложностью.
Наиболее близким по техническому исполнению к предложенному устройству (прототипом) является роторный вибрационный гироскоп (РВГ), содержащий диэлектрический вал, двигатель вращения и ротор, установленный на валу в виде гантели (2 - Брозгуль Л.И. «Динамически настраиваемые гироскопы», Москва, «Машиностроение», 1994 г., с. 156).
Недостатками данного устройства являются сложность съема информационного сигнала, погрешности, обусловленные влиянием дополнительных упругих моментов, пропорциональных деформациям подвеса, а также невозможность одновременного измерения двух взаимно перпендикулярных составляющих угловой скорости.
Задачей изобретения является повышение точности измерения, а также достижение возможности одновременного измерения двух взаимно перпендикулярных составляющих угловой скорости.
Для решения указанной задачи предлагается датчик угловой скорости, содержащий двигатель вращения и диэлектрический вал.
Согласно изобретению, четыре инерционные массы, четыре оси, четыре шарнира, четыре стержня, четыре пьезоэлектрических датчика, четыре электромагнита, четыре датчика Холла, причем инерционные массы расположены симметрично относительно диэлектрического вала и сдвинуты на 90° друг относительно друга, каждая инерционная масса закреплена на оси, соединенной с диэлектрическим валом посредством шарнира, и через стержень соединена с соответствующим пьезоэлектрическим датчиком, жестко закрепленным на диэлектрическом валу, выход каждого пьезоэлектрического датчика подключен ко входу соответствующего электромагнита, выход которого подключен ко входу соответствующего датчика Холла, выходы которых являются выходами устройства, с которых снимается информация о составляющих угловой скорости.
Техническим результатом является повышение точности измерителя угловой скорости, а также достижение возможности одновременного измерения двух взаимно перпендикулярных составляющих угловой скорости.
На чертеже показана функциональная схема датчика угловой скорости (ДУС).
ДУС содержит двигатель вращения (ДВ) 1, диэлектрический вал 2, четыре инерционные массы 31; 32, 33; 34, расположенные симметрично относительно диэлектрического вала 2 и сдвинутые на 90° друг относительно друга, четыре оси 41, 42, 43, 44, четыре шарнира 51, 52, 53, 54, четыре стержня 61, 62, 63, 64, четыре пьезоэлектрических датчика (ПЭД) 71, 72, 73, 74, четыре электромагнита 81, 82, 83, 84, четыре датчика Холла 91, 92, 93, 94. Для удобства последующего описания схемы и принципа действия ДУС на чертеже введена инерциальная система координат ξηζ и приборная (связанная с диэлектрическим валом ДУС) ΧΥΖ, совпадающая в начальный момент времени с инерциальной.
ПЭД 71, 72, 73, 74 жестко закреплены на диэлектрическом валу. ПЭД 71, 73 сдвинуты на 90° относительно ПЭД 72, 74: ПЭД 71, 73 расположены по оси Х(ξ), а ПЭД 72, 74 - по оси Y(η).
Датчик Холла может быть выполнен в виде устройства, описанного в (3 - Косулин В.Д., Михайлов Г.Б., и др. «Вентильные электродвигатели малой мощности для промышленных роботов», Ленинград. Энергоатомиздат, 1988 г., 113 с.).
Датчики Холла (ДХ) 91, 93 сдвинуты на 90° относительно ДХ 92, 94 и расположены по оси ξ, а ДХ 92, 94 - по оси η, и жестко закреплены на корпусе ДУС (на фиг. не показаны). Инерционные массы 31, 32, 33, 34 закреплены на осях 41, 42, 43, 44, соединенных с валом 2 посредством соответствующих шарниров 51, 52, 53, 54 и имеющих практически бесконечную жесткость на изгиб и кручение. Стержни 61, 62, 63, 64, обеспечивающие жесткую связь инерционных масс 31, 32, 33, 34 с пьезоэлектрическими датчиками 71, 72, 73, 74, имеют также практически бесконечную жесткость на изгиб и кручение. Выходы ПЭД 71, 72, 73, 74 подключены ко входам электромагнитов 81, 82, 83, 84, соответственно, выходы электромагнитов 81, 82, 83, 84 имеют магнитоэлектрическую связь со входами датчиков Холла 91, 92, 93, 94. Выходы датчиков Холла 91, 93 являются выходами устройства при измерении составляющей угловой скорости ωξ, а выходы ДХ 92, 94 - при измерении составляющей угловой скорости ωη.
Представленный ДУС обеспечивает измерение угловой скорости следующим образом.
(Рассмотрим вначале процесс измерения скорости вращения основания только вокруг оси η с угловой скоростью ωη, направление которой показано на чертеже). Диэлектрический вал 2 с помощью двигателя вращения 1 приводится во вращение вокруг оси ζ с угловой скоростью Ω. При вращении основания (корпуса ДУС) со скоростью ωη возникает гироскопический момент МГХ=Нωη, который стремится совместить вектор кинетического момента Н=ΙΩ с вектором угловой скорости ωη (I - момент инерции инерционной массы).
Под действием гироскопического момента МГХ инерционная масса 32 через стержень 62 оказывает давление на пьезоэлектрический датчик 72 с силой, прямо пропорциональной МГХ и, соответственно, угловой скорости ωη.
С выхода пьезоэлектрического датчика 72, вращающегося вместе с валом 2, снимается электрический сигнал, пропорциональный давлению (и, следовательно, угловой скорости ωη), который поступает на вход электромагнита 82. При совпадении электромагнита 82 с датчиком Холла 92 сигнал, пропорциональный составляющей угловой скорости ωη, поступает на вход датчика Холла 92, выход которого является выходом устройства. С выхода датчика Холла 92 снимается сигнал UY. Очевидно, что максимальный сигнал снимается с выхода ПЭД 72 (и далее с выхода датчика Холла 92), когда ось 42 совпадает с положительным направлением оси η (МГХ максимален). (При повороте оси 42 на 90° выходной сигнал с датчика Холла 92, пропорциональный ωη, равен нулю). При вращении основания с угловой скоростью ωη противоположного знака инерционная масса 34 через стержень 64 оказывает давление на пьезоэлектрический датчик 74 с силой, прямо пропорциональной МГХ, и соответственно, угловой скорости ωη. Формирование информационного сигнала и его съем с пьезоэлектрического датчика 74, вращающегося вместе с валом 2, происходят аналогично вышеизложенному.
Аналогично может быть рассмотрен процесс измерения скорости вращения основания вокруг оси ξ с угловой скоростью ωξ, направление которой показано на чертеже. При вращении возникает гироскопический момент ΜΓΥ=Ηωξ, который стремится совместить вектор кинетического момента с вектором угловой скорости с ωξ. Под действием гироскопического момента ΜΓΥ инерционная масса 31 через стержень 61 оказывает давление на пьезоэлектрический датчик 71 с силой, прямо пропорциональной МГΥ и, соответственно, угловой скорости ωξ.
С выхода пьезоэлектрического датчика 71, вращающегося вместе с валом 2, снимается электрический сигнал, пропорциональный давлению (и, следовательно, угловой скорости ωξ), который поступает на вход электромагнита 81. При совпадении электромагнита 81 с датчиком Холла 91, сигнал, пропорциональный составляющей угловой скорости ωξ, поступает на вход датчика Холла 91, выход которого является выходом устройства. С выхода датчика Холла 91 снимается сигнал UX. Очевидно, что максимальный сигнал снимается с выхода ПЭД 71 (и далее с выхода датчика Холла 91), когда ось 41 совпадает с положительным направлением оси ξ (ΜΓΥ максимален). (При повороте оси 42 на 90° выходной сигнал с датчика Холла 92, пропорциональный ωξ, равен нулю).
При вращении основания с угловой скоростью ωξ противоположного знака инерционная масса 33 через стержень 63 оказывает давление на пьезоэлектрический датчик 73 с силой, прямо пропорциональной МГΥ и, соответственно, угловой скорости ωξ. Формирование информационного сигнала и его съем с пьезоэлектрического датчика 73, вращающегося вместе с валом 2, происходят аналогично вышеизложенному.
Таким образом, представленный ДУС позволяет обеспечить простой и высокоточный съем измерительной информации и тем самым повысить точность измерения угловой скорости, а также обеспечить возможность измерения двух взаимно перпендикулярных составляющих угловой скорости одновременно.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛАЗЕРНЫЙ ВОЛОКОННЫЙ ДАТЧИК УГЛОВОЙ СКОРОСТИ | 1996 |
|
RU2129283C1 |
| УСТРОЙСТВО И СПОСОБ ИЗМЕРЕНИЯ АБСОЛЮТНОЙ УГЛОВОЙ СКОРОСТИ | 2016 |
|
RU2621642C1 |
| ГИРОСКОП-АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ РОТОРА | 1999 |
|
RU2158903C1 |
| ШИРОКОДИАПАЗОННЫЙ СТЕНД ДЛЯ КОНТРОЛЯ ИЗМЕРИТЕЛЕЙ УГЛОВОЙ СКОРОСТИ | 2008 |
|
RU2378618C2 |
| ГИРОСКОП-АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ РОТОРА И ПОЛНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИЕЙ | 2014 |
|
RU2568147C1 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2011 |
|
RU2516207C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА | 2010 |
|
RU2440595C1 |
| ЕМКОСТНЫЙ ДАТЧИК ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ УГЛОВОГО ДВИЖЕНИЯ ОБЪЕКТОВ | 2010 |
|
RU2442991C1 |
| Измеритель угла наклона подвижного объекта | 1985 |
|
SU1255858A1 |
Изобретение относится к измерительным приборам, в частности к измерителям угловой скорости. Датчик угловой скорости содержит двигатель вращения и диэлектрический вал, при этом в него дополнительно введены по четыре инерционные массы, оси, шарнира, стержня, пьезоэлектрических датчика, электромагнита, датчика Холла, причем инерционные массы расположены симметрично относительно диэлектрического вала и сдвинуты на 90° друг относительно друга, каждая инерционная масса закреплена на оси, соединенной с диэлектрическим валом посредством шарнира, и через стержень соединена с соответствующим пьезоэлектрическим датчиком, жестко закрепленным на диэлектрическом валу, выход каждого пьезоэлектрического датчика подключен ко входу соответствующего электромагнита, выход которого подключен ко входу соответствующего датчика Холла, выходы которых являются выходами устройства, с которых снимается информация о составляющих угловой скорости. Технический результат - повышение точности измерителя угловой скорости, одновременное измерение двух взаимно перпендикулярных составляющих угловой скорости. 1 ил.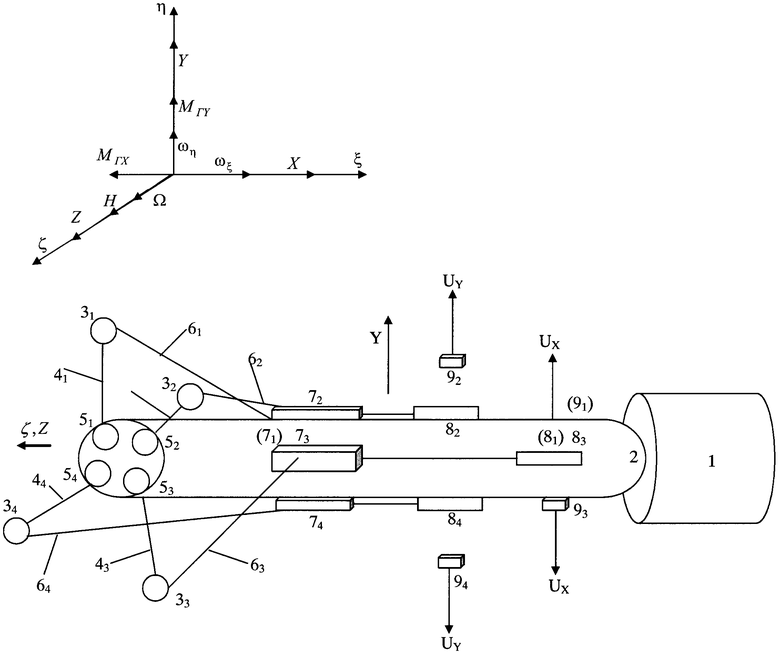
Датчик угловой скорости, содержащий двигатель вращения и диэлектрический вал, отличающийся тем, что в него дополнительно введены по четыре инерционные массы, оси, шарнира, стержня, пьезоэлектрического датчика, электромагнита, датчика Холла, причем инерционные массы расположены симметрично относительно диэлектрического вала и сдвинуты на 90° друг относительно друга, каждая инерционная масса закреплена на оси, соединенной с диэлектрическим валом посредством шарнира, и через стержень соединена с соответствующим пьезоэлектрическим датчиком, жестко закрепленным на диэлектрическом валу, выход каждого пьезоэлектрического датчика подключен ко входу соответствующего электромагнита, выход которого подключен ко входу соответствующего датчика Холла, выходы которых являются выходами устройства, с которых снимается информация о составляющих угловой скорости.
| Л.И | |||
| Брозгуль "Динамически настраиваемые гироскопы, модели погрешностей для систем навигации", Москва, "Машиностроение", 1989, стр | |||
| Упругое экипажное колесо | 1918 |
|
SU156A1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ | 1991 |
|
RU2006868C1 |
| ДАТЧИК УГЛОВОЙ СКОРОСТИ | 2011 |
|
RU2457493C1 |
| US 7219547 B2, 22.05.2007. | |||

