Изобретение относится к устройствам для измерения углов ориентации летательных аппаратов, а также наземных транспортных средств и других подвижных объектов (ПО).
Известны гироскопические системы ориентации [1, 2] летательных аппаратов. Широкое применение находят системы ориентации на основе гироскопической курсовертикали [2]. Она содержит двухосную платформу, стабилизированную в плоскости горизонта по сигналам пары двухстепенных гироскопов и двух жидкостных маятниковых датчиков. Курсовой гироскоп установлен на наружной (креновой) раме двухосного стабилизатора, а также связан тягой с внутренней, что обеспечивает стабилизацию оси наружной рамы курсового гироскопа по вертикали. Недостатком описанной системы ориентации является довольно большая масса (>8,5 кг) и высокая стоимость, что является неприемлемым для малогабаритных летательных аппаратов.
Применяются системы ориентации на основе трехосных гиростабилизаторов [1]. Их недостатком также являются большие масса, габариты и стоимость. Известны системы ориентации космических аппаратов (Пельпор Д.С. Гироскопические системы ориентации и стабилизации. - М.: Машиностроение. 1982. - 166 с.), содержащие гироорбитант в виде трехстепенного гироскопа в кардановом подвесе и инфракрасную вертикаль (с.135-139). Недостатком такой системы ориентации являются наличие кардановых погрешностей в гироорбитанте при отклонениях космического аппарата от плоскости горизонта.
Известна система ориентации, содержащая пару трехстепенных гироскопов: гировертикаль и курсовой гироскоп (прототип) [1]. Гировертикаль представляет собой трехстепенный астатический гироскоп, имеющий шарикоподшипниковые опоры в осях подвеса наружной и внутренней рамок. На внутренней рамке установлены два жидкостных маятниковых датчика, реагирующих на отклонение гироскопа по двум взаимно-перпендикулярным направлениям. Электрические выходы этих датчиков соединены с обмотками управления датчиков моментов горизонтальной коррекции. Совокупность двух жидкостных маятниковых датчиков и двух датчиков моментов образует систему горизонтальной коррекции. По осям подвеса наружной и внутренней рамок гировертикали установлены датчики углов крена и тангажа, обычно трансформаторного типа. Датчик крена обычно имеет программное устройство (в виде базы, расположенной на корпусе и поворачиваемой двигателем). Курсовой прибор представляет собой также трехстепенный гироскоп, ось наружной рамки которого параллельна нормальной оси ПО. Гироскоп также имеет шарикоподшипниковый подвес, на внутренней рамке которого расположен жидкостный маятниковый датчик, выход его соединен с обмоткой управления датчика момента, создающего момент вокруг оси подвеса наружной рамки. Жидкостный маятниковый датчик и датчик момента образуют систему горизонтальной коррекции, удерживающую ось собственного вращения курсового гироскопа в плоскости горизонта. Датчик съема сигнала представляет собой, как правило, трансформаторный датчик угла, регистрирующий поворот наружной рамки относительно базы этого датчика, расположенной на корпусе. База имеет привод в виде двигателя, который может ее разворачивать относительно корпуса на программный угол. В состав системы ориентации могут входить выключатель коррекции, источники питания и другие устройства, необходимые для обеспечения ее работы. Работает система ориентации следующим образом. Перед движением ось собственного вращения гировертикали занимает вертикальное положение, а у курсового гироскопа - горизонтальное. С помощью программного устройства задается программный угол курса. При движении ПО возникают его повороты относительно плоскости горизонта и заданного направления движения по курсу. Эти повороты фиксируются соответствующими гироскопами, преобразуются датчиками угла в электрические сигналы, а последние подаются в систему управления и навигации. Система ориентации компактна и обладает малой массой, находит широкое применение в виде, например, МГВ-4 и ГА-8 и других систем.
Недостатком данной системы ориентации является наличие в курсовом гироскопе кардановых погрешностей, которые могут достигать при угле крена 30° и тангаже 10° величин до 8-10°. Кроме того, в гировертикали также могут иметь место кардановые погрешности, если ось подвеса ее наружной рамки направлена по поперечной оси объекта. Это снижает точность управления, а также уменьшает устойчивость системы летательный аппарат - автопилот.
Задачей предлагаемого изобретения является повышение точности и надежности съема информации в каналах системы ориентации. Задача решается за счет того, что в систему ориентации, состоящую из гировертикали и гироскопа направления, установленных на подвижном объекте и содержащих датчики съема сигналов по углам тагнажа, крена и курса, введены три датчика угловых скоростей, оси чувствительности которых параллельны нормальной, поперечной и продольной осям объекта, три акселерометра с аналогично направленными осями чувствительности, а также бортовой компьютер с аналого-цифровым преобразователем. Выходы гироскопа направления, гировертикали, трех датчиков угловых скоростей и трех акселерометров соединены через входы многоканального аналого-цифрового преобразователя (например, 16-канальной 16-разрядной платы АЦП PCL-816) с соответствующими входами бортового компьютера.
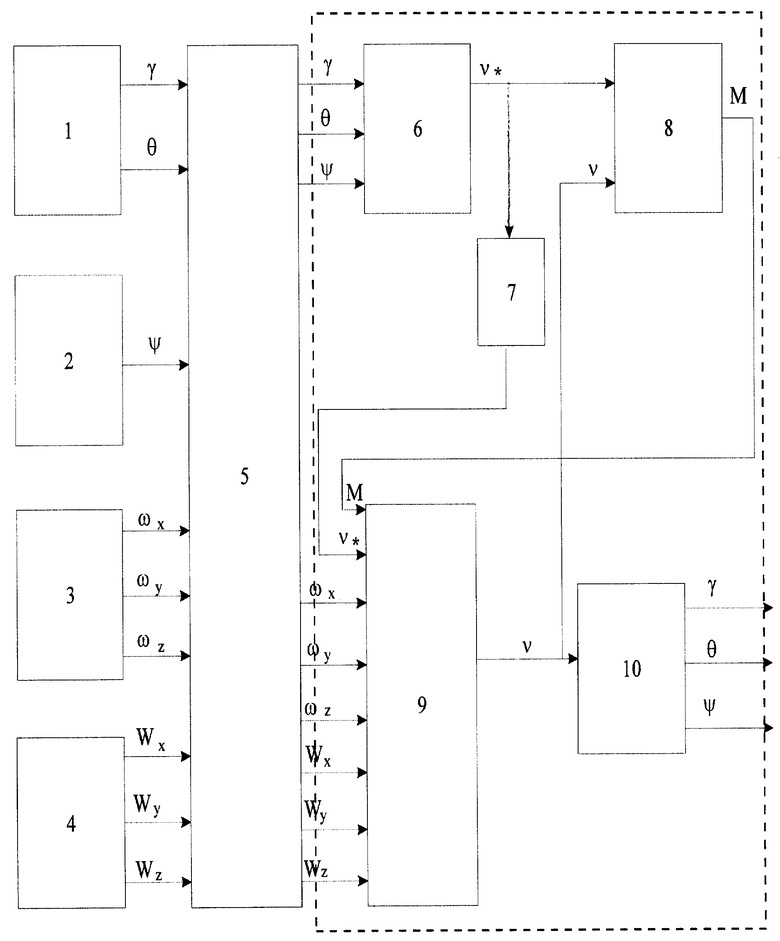
Система ориентации, схема которой представлена на чертеже, состоит из гировертикали 1, измеряющей и выдающей в систему управления сигналы по углу крена  и углу тангажа
и углу тангажа  , и гироскопа направления 2, выдающего сигнал по углу курса
, и гироскопа направления 2, выдающего сигнал по углу курса  . В систему ориентации также входят трехкомпонентный измеритель угловых скоростей (ТГИУС) 3 и трехкомпонентный измеритель кажущегося ускорения (ТИКУ) 4, которые вырабатывают в виде напряжения постоянного тока сигналы трех составляющих угловой скорости в проекциях на оси объектовой системы координат
. В систему ориентации также входят трехкомпонентный измеритель угловых скоростей (ТГИУС) 3 и трехкомпонентный измеритель кажущегося ускорения (ТИКУ) 4, которые вырабатывают в виде напряжения постоянного тока сигналы трех составляющих угловой скорости в проекциях на оси объектовой системы координат  ,
,  ,
,  и трех составляющих кажущегося ускорения в проекциях на те же оси
и трех составляющих кажущегося ускорения в проекциях на те же оси  ,
,  ,
,  , которые преобразуются аналого-цифровым преобразователем (АЦП) 5. Преобразованные сигналы, соответствующие углам крена, тангажа и курса, обрабатываются блоком кватернионных преобразований 6, который вычисляет кватернион ориентации ПО. Вычисленное значение кватерниона поступает на входы блока включения и выключения коррекции 7 и блока идентификации погрешностей ТГИУС и ТИКУ 8, с выхода блока включения и выключения коррекции 7 - на вход блока вычисления кватерниона ориентации 9, на другие входы которого поступают сигналы с выхода блока идентификации погрешностей 8 и сигналы с шести выходов АЦП 5, соответствующие трем компонентам угловой скорости и трем компонентам кажущегося ускорения. С выхода блока вычисления кватерниона ориентации 9 кватернион ориентации ПО поступает на вход блока вычисления углов ориентации 10, с выходов которого выдаются сигналы, соответствующие углам крена, тангажа и курса ПО. Блоки 6-10 входят в состав бортового компьютера (БК), в качестве которого может быть применен специализированный вычислитель, например на основе микропроцессоров 1834ВМ86 или 1821ВМ85. В качестве гировертикали 1 (ГВ) может быть применен прибор МГВ-2 или МГВ-4, в качестве гироскопа направления 2 (ГН) - прибор ГА-6 или ГА-8, в качестве датчиков ТГИУС 3 - приборы ДУСВЧ или другие (ВГ910 и ВГ951), а в качестве датчиков ТИКУ 4 - акселерометры ДЛУММ-3, 5, 10 и т.д. Отметим, что введение ДУСов и акселерометров в систему ориентации не приводит к увеличению массы пилотажно-навигационного комплекса летательного аппарата: эти приборы уже имеются в его системе управления и используются по другому назначению.
, которые преобразуются аналого-цифровым преобразователем (АЦП) 5. Преобразованные сигналы, соответствующие углам крена, тангажа и курса, обрабатываются блоком кватернионных преобразований 6, который вычисляет кватернион ориентации ПО. Вычисленное значение кватерниона поступает на входы блока включения и выключения коррекции 7 и блока идентификации погрешностей ТГИУС и ТИКУ 8, с выхода блока включения и выключения коррекции 7 - на вход блока вычисления кватерниона ориентации 9, на другие входы которого поступают сигналы с выхода блока идентификации погрешностей 8 и сигналы с шести выходов АЦП 5, соответствующие трем компонентам угловой скорости и трем компонентам кажущегося ускорения. С выхода блока вычисления кватерниона ориентации 9 кватернион ориентации ПО поступает на вход блока вычисления углов ориентации 10, с выходов которого выдаются сигналы, соответствующие углам крена, тангажа и курса ПО. Блоки 6-10 входят в состав бортового компьютера (БК), в качестве которого может быть применен специализированный вычислитель, например на основе микропроцессоров 1834ВМ86 или 1821ВМ85. В качестве гировертикали 1 (ГВ) может быть применен прибор МГВ-2 или МГВ-4, в качестве гироскопа направления 2 (ГН) - прибор ГА-6 или ГА-8, в качестве датчиков ТГИУС 3 - приборы ДУСВЧ или другие (ВГ910 и ВГ951), а в качестве датчиков ТИКУ 4 - акселерометры ДЛУММ-3, 5, 10 и т.д. Отметим, что введение ДУСов и акселерометров в систему ориентации не приводит к увеличению массы пилотажно-навигационного комплекса летательного аппарата: эти приборы уже имеются в его системе управления и используются по другому назначению.
Принцип работы схемы компенсации кардановых погрешностей состоит в следующем. При движении ПО с углами крена и тангажа меньше наперед заданных значений, сигналы по курсу, крену и тангажу снимаются с ГВ 1 и ГН 2, пересчитываются блоком кватернионных преобразований БК 6 в значения кватерниона ориентации по алгоритмам:

где  ,
,  ,
,  - курс, крен и тангаж, полученные с ГН и ГВ.
- курс, крен и тангаж, полученные с ГН и ГВ.
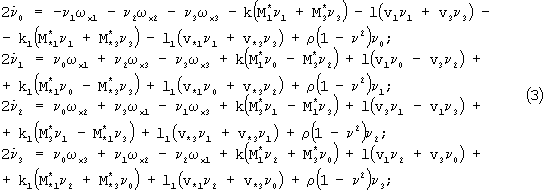
При малых углах крена и тангажа ПО выражения (1) вводятся через блок включения и выключения коррекции 7 БК в качестве корректирующих членов в кватернионное уравнение определения углов ориентации по сигналам ТГИУС 3 и ТИКУ 4. Реализация кватернионного уравнения производится в блоке вычисления кватерниона ориентации 9 в виде следующего алгоритма:


где  - кватернион угловой скорости ПО, сформированный на основе сигналов, измеренных ДУСами в проекциях на соответствующие оси,
- кватернион угловой скорости ПО, сформированный на основе сигналов, измеренных ДУСами в проекциях на соответствующие оси,
 - кватернион линейной скорости ПО, полученный по сигналам ТИКУ
- кватернион линейной скорости ПО, полученный по сигналам ТИКУ  в проекциях на соответствующие оси,
в проекциях на соответствующие оси,
 - разность кватернионов ориентации, полученных по выражениям (1) и (2), которая запоминается в блоке идентификации погрешностей ТГИУС и ТИКУ 8 в режиме движения ПО с малыми углами крена и тангажа (меньшими 5°). Эта разность характеризует погрешности датчиков ТГИУС И ТИКУ и в случае больших углов крена и тангажа ПО используется в качестве корректирующего члена при определении кватерниона ориентации по выражению (2).
- разность кватернионов ориентации, полученных по выражениям (1) и (2), которая запоминается в блоке идентификации погрешностей ТГИУС и ТИКУ 8 в режиме движения ПО с малыми углами крена и тангажа (меньшими 5°). Эта разность характеризует погрешности датчиков ТГИУС И ТИКУ и в случае больших углов крена и тангажа ПО используется в качестве корректирующего члена при определении кватерниона ориентации по выражению (2).
Выражение (2) представляется в скалярном виде:










При углах крена или тангажа, больших наперед заданных значений, выходные сигналы по углам ориентации ПО снимаются не с ГН 1 и ГВ 2, а рассчитываются в БК с использованием сигналов ТГИУС 3 и ТИКУ 4 с учетом взятого из блока 8 значения корректирующего члена  по алгоритмам:
по алгоритмам:


где  .
.
Полученный в блоке 9 кватернион ориентации в блоке 10 преобразуется в углы крена, тангажа и курса ПО, которые и используются в системе управления ПО. Для преобразования используются следующие выражения, полученные с помощью компонент кватерниона ориентации:

Полезность данного изобретения определяется повышением точности съема углов ориентации за счет уменьшения кардановой ошибки ГН 1 и ГВ 2 при больших углах крена и тангажа путем создания второго канала ориентации на основе ДУСов, не имеющих кардановой погрешности и акселерометров. Так, если при угле крена 30° кардановая ошибка в ГН 1 может достигать 10-12°, то за счет применения предложенной схемы компенсации эта погрешность уменьшается в 10-20 раз в зависимости от длительности виража. При этом погрешности ДУСов, имеющих несопоставимо большую угловую скорость дрейфа, чем ГН 1 (в ГА-6 он составляет 3°/час; в ГА-8 1°/час, в то время как в ДУСВЧ 36°/час), во время разворотов устраняются алгоритмами коррекции при движении ПО с малыми (до 5°) углами крена и тангажа.
Источники информации
1. Пельпор Д.С., Ягодкин В.В. Гироскопические системы: ч. I Проектирование гироскопических систем. - М.: Высшая школа, 1977. - 216 с.
2. Курсовертикаль гироскопическая КВГ-1. Техническое описание. 6В2.568.004ТО, 1971. – 34 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Малогабаритная адаптивная курсовертикаль | 2016 |
|
RU2714144C2 |
| Способ автономной ориентации подвижного объекта с помощью инерциального измерительного модуля | 2019 |
|
RU2738342C1 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| Способ автономной ориентации объектов в околоземном пространстве | 2022 |
|
RU2787971C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛЬЮ С РАДИАЛЬНОЙ КОРРЕКЦИЕЙ И БЕСПЛАТФОРМЕННАЯ ГИРОВЕРТИКАЛЬ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2017 |
|
RU2659970C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| СПОСОБ УПРАВЛЕНИЯ БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛЬЮ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2574379C1 |
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТНЫХ ХАРАКТЕРИСТИК АВТОНОМНОЙ, БЕСПЛАТФОРМЕННОЙ ГИРОВЕРТИКАЛИ С ИНТЕГРАЛЬНОЙ КОРРЕКЦИЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2021 |
|
RU2801620C2 |
| Устройство управления креновой рамой курсовертикали | 2022 |
|
RU2796075C1 |
| Адаптивная бесплатформенная инерциальная курсовертикаль | 2016 |
|
RU2647205C2 |
Изобретение относится к устройствам для измерения углов ориентации летательных аппаратов, а также наземных транспортных средств и других подвижных объектов. Сущность изобретения: система ориентации содержит гировертикаль, измеряющую углы крена и тангажа, гироскоп направления, измеряющий угол курса, трехкомпонентный измеритель угловых скоростей и трехкомпонентный измеритель кажущегося ускорения. Преобразованные в АЦП сигналы, соответствующие углам крена, тангажа и курса, обрабатываются блоком кватернионных преобразований, который вычисляет кватернион ориентации. Вычисленное значение кватерниона поступает на входы блока включения и выключения коррекции и блока идентификации погрешностей, а с выхода блока включения и выключения коррекции - на вход блока вычисления кватерниона ориентации, на другие входы которого поступают сигналы с выхода блока идентификации погрешностей и сигналы, соответствующие трем компонентам угловой скорости и трем компонентам кажущегося ускорения. Блок вычисления углов ориентации по сигналам блока вычисления кватерниона ориентации вычисляет углы крена, тангажа и курса. Технический результат - повышение точности и надежности определения углов ориентации. 1 ил.
Система ориентации, содержащая гировертикаль и гироскоп направления, установленные на подвижном объекте, отличающаяся тем, что в нее введены три датчика угловых скоростей, оси чувствительности которых параллельны нормальной, поперечной и продольной осям объекта, три измерителя кажущегося ускорения с аналогично направленными осями чувствительности, а также блок кватернионных преобразований, блок включения и выключения коррекции, блок идентификации погрешностей, блок вычисления кватерниона ориентации, блок вычисления углов ориентации и аналого-цифровой преобразователь, при этом выходы гироскопа направления и гировертикали соединены через входы многоканального аналого-цифрового преобразователя с соответствующими входами блока кватернионных преобразований, выход блока кватернионных преобразований соединен со входом блока включения и выключения коррекции и первым входом блока идентификации погрешностей, выход блока включения и выключения коррекции - со входом блока вычисления кватерниона ориентации, другие входы которого соединены с выходом блока идентификации погрешностей и через аналого-цифровой преобразователь соединены с выходами трех датчиков угловых скоростей и трех измерителей кажущегося ускорения, а выход блока вычисления кватерниона ориентации соединен со входом блока вычисления углов ориентации, и вторым входом блока идентификации погрешностей.
| ПЕЛЬПОР Д.С., ЯГОДКИН В.В | |||
| Гироскопические системы | |||
| ч.I | |||
| Проектирование гироскопических систем | |||
| - М.: Высшая школа, 1977, с.216 | |||
| Устройство для определения азимута | 1987 |
|
SU1631275A1 |
| SU 1773157 А1, 19.02.1989 | |||
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 1996 |
|
RU2124184C1 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
| US 4387513 А, 14.07.1983 | |||
| DE 19852490 А1, 31.05.2000. | |||

