Изобретение относится к измерительной технике и может быть использовано для коррекции характеристик измерительных преобразователей, которые производят измерения в условиях динамики влияющего фактора, в частности, при измерении давления в условиях резких изменений температуры.
При измерении физических параметров имеются величины, которые являются влияющими по отношению к основным измеряемым величинам. Очень часто влияющей величиной (помехой) является температура. Так, например, при измерении давления с помощью интегральных тензодатчиков температура является причиной возникновения дополнительной погрешности. Статическая составляющая этой погрешности приводит к изменению показаний канала измерения давления. Кроме статической составляющей температурной погрешности существует также динамическая составляющая, которая в чистом виде проявляется при постоянном давлении на входе преобразователя и резких температурных изменениях. При этом выходной сигнал датчика давления будет содержать дополнительную динамическую температурную погрешность, которая будет проявляться в виде всплесков сигнала давления в моменты резкого изменения температуры. Известные способы, направленные на коррекцию статических характеристик измерительных преобразователей, не учитывают динамическое влияние температуры на результат измерения [Ваганов В.И. Интегральные тензопреобразователи. М.: Энергоатомиздат, 1983, с 76-94; Емец С.В., Полищук И.Н. Способ градуировки измерительных преобразователей с интегрированным чувствительным элементом, Патент РФ №2223465, 2004].
Известны способы борьбы с динамическими температурными эффектами на этапе проектирования прибора [Джашитов В.Э., Панкратов В.М., Барулина М.А. Математическое моделирование датчика давления в условиях механических и тепловых ударов // Датчики и системы, 2009. №8. С.37-40; Мокров Е.А., Тихомиров Д.В., Трофимов А.А. Моделирование воздействия неоднородных нестационарных тепловых полей на датчики давления и перемещения // Известия ТРТУ, С.16-22]. Для этих способов характерно построение, аналитическое и компьютерное исследование математических моделей рассматриваемых датчиков, работающих в условиях воздействия нестационарных неоднородных температурных полей измеряемой и окружающей сред. Построенные и реализованные в программных комплексах алгоритмы, соотношения и формулы составляют основу математической модели тепловых процессов в сложных датчиках, приборах и устройствах, и позволяют рассчитывать и проводить анализ трехмерных неоднородных нестационарных температурных полей этих приборов и устройств в заданном числе расчетных точек. В конечном результате это позволяет решать задачи выбора оптимальных решений по конструкции датчика. При использовании математического моделирования становится возможным комбинирование различных начальных условий эксплуатации, материалов и временных характеристик воздействия возмущающих факторов. В этих способах производится разбивка модели датчика на элементарные элементы, которые имеют теплофизические и геометрические характеристики и тепловые связи, соответствующие реальной конструкции. Однако данные дискретные математические модели в полной мере не отражают физического процесса. К тому же конструктивные и технологические неоднородности, свойственные реальному датчику и полученные в процессе его изготовления, не позволяют достигнуть абсолютного приближения к математической модели. В результате динамическая составляющая температурной погрешности не может быть полностью скомпенсирована.
Наиболее близким аналогом является способ коррекции статических характеристик измерительных преобразователей [Емец С.В. Способ коррекции статических характеристик измерительных преобразователей, патент РФ №2130194, 1999], заключающийся в их балансировке, градуировке, уменьшении дрейфа нуля и изменении чувствительности от влияния дополнительного параметра. В этом способе значения выходных величин измерительного преобразователя измеряют при различных комбинациях его входных величин, одна из которых является измеряемой физической величиной, а другая - помехой по отношению к первой. По результатам измерений формируют математическую модель преобразователя в виде двух наборов коэффициентов, каждый из которых однозначно описывает поверхность передаточной функции своего измерительного канала. Входные величины каждого канала в условиях их взаимного влияния и нелинейности передаточных функций определяют вычислением координат точки пересечения проекций линий пересечения поверхностей передаточных функций с соответствующими плоскостями выходных величин каналов.
Данный способ позволяет скомпенсировать статическую составляющую погрешности, но не учитывает динамику влияющего фактора. Как правило, при быстрых изменениях влияющей величины в чувствительном элементе измерительного преобразователя возникают дополнительные, нежелательные градиенты, например, тепловые, механические и т.п., которые приводят к появлению дополнительного сигнала в канале измерения основной величины. В частном случае, при измерении давления при постоянной температуре мембрана с чувствительным элементом прогрета равномерно и воспринимает только деформацию, вызванную измеряемым давлением. При резких температурных изменениях мембрана испытывает дополнительные деформации, вызванные неоднородностью температурного поля как в плоскости, так и по толщине мембраны. Эти деформации вызывают на выходе дополнительный сигнал, неотличимый от полезного. Таким образом, динамика помехи оказывает влияние на измерения основной величины и искажает показания канала ее измерения.
Целью настоящего изобретения является повышение точности измерения за счет компенсации дополнительной динамической погрешности.
Поставленная цель достигается следующим образом. В преобразователе выделяют каналы измерения основной и дополнительной (влияющей) входных величин. Затем проводят градуировку каналов измерительного преобразователя, которая заключается в следующем. На вход преобразователя подают различные комбинации входных величин. Основную входную величину стабилизируют в нескольких точках диапазона преобразования. В каждой точке стабилизации основной входной величины осуществляют ступенчатое изменение влияющей входной величины в пределах ее диапазона изменения с различными начальными значениями и различными по знаку и по амплитуде приращениями. В процессе градуировочного эксперимента фиксируют поведение во времени значений входных и выходных величин измерительных каналов основной и влияющей входных величин. При обработке результатов измерения формируют дополнительный виртуальный канал путем вычисления скорости изменения значений выходной величины канала измерения влияющей величины. После этого формируют математическую модель, которая связывает выходные значения основного, дополнительного и виртуального каналов с входными величинами преобразователя. Текущее значение основной входной величины определяют по параметрам математической модели и текущим значениям выходных величин основного, дополнительного и виртуального измерительных каналов.
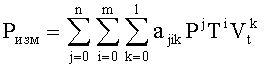
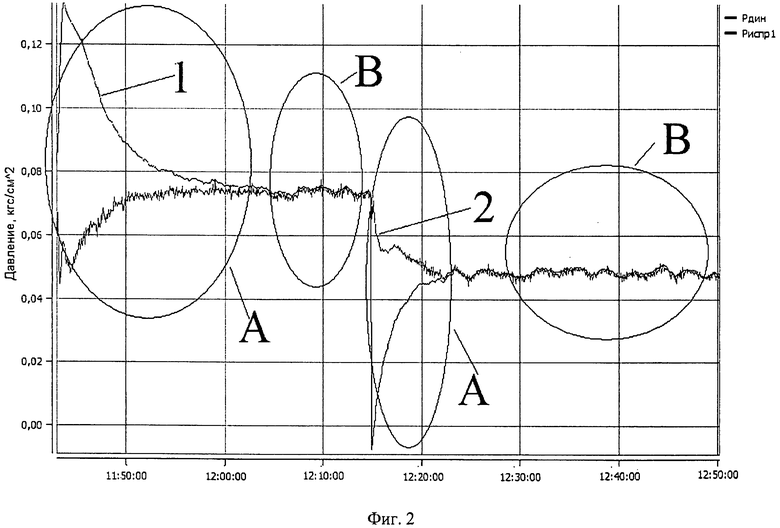
На фиг.1 изображено поведение канала давления при быстрых изменениях температуры в пределах рабочего диапазона температуры, на фиг.2 изображены результаты обработки экспериментальных данных.
Предложенный способ можно проиллюстрировать на примере измерения давления с помощью интегрального тензопреобразователя. Известно, что данный преобразователь подвержен температурному влиянию. Использование методов статической коррекции в соответствии с источником [Емец С.В. Способ коррекции статических характеристик измерительных преобразователей, патент РФ №2130194, 1999] позволяет уменьшить статическую температурную погрешность до уровня, соизмеримого с погрешностью образцового грузопоршневого манометра. Однако резкие изменения температуры приводят к появлению дополнительной динамической температурной погрешности измерения давления, значения которой могут быть существенными (по данным [Джашитов В.Э., Панкратов В.М., Барулина М.А. Математическое моделирование датчика давления в условиях механических и тепловых ударов // Датчики и системы, 2009. №8. С.37-40; Мокров Е.А., Тихомиров Д.В., Трофимов А.А. Моделирование воздействия неоднородных нестационарных тепловых полей на датчики давления и перемещения // Известия ТРТУ, С.16-22] динамическая температурная погрешность может достигать 30%).
Для оценки этого эффекта был проведен эксперимент, в котором осуществлялись ступенчатые изменения температуры путем быстрого переноса преобразователя из одного термостата в другой. Закон изменения внешней температуры представлен графиком 1 на фиг.1. Данные эксперимента обработаны по способу-прототипу [Емец С.В. Способ коррекции статических характеристик измерительных преобразователей, патент РФ №2130194, 1999] и представлены на фиг.1 графиком 3 (расчетные значения давления) и графиком 2 (расчетные значения температуры чувствительного элемента датчика давления), где видно, что «всплески» показаний канала давления, возникающие в моменты резкого повышения или понижения температуры, соизмеримы или даже больше основной погрешности преобразователя. По графику изменения давления видно, что статическая коррекция не справляется с обработкой такого эксперимента, и появляется динамическая составляющая температурной погрешности в моменты резкого изменения температуры. В периоды стабилизации температуры чувствительного элемента датчика давления (фиг.1, график 2) показания канала измерения давления (фиг.1, график 3) выходят на статический уровень, который содержит только статическую погрешность.
Совместный анализ поведения каналов давления и температуры чувствительного элемента датчика давления (фиг.1, графики 3 и 2 соответственно) позволил установить, что данный динамический эффект обусловлен скоростью изменения температуры в чувствительном элементе, а амплитуда динамической составляющей погрешности зависит от скорости изменения температуры датчика давления, которая, в свою очередь, определяется амплитудой ступенчатого воздействия температуры. Указанный эффект характерен для всех интегральных тензопреобразователей давления, в частности, для преобразователей избыточного давления типа D и MD производства ЗАО «Орлекс» и ООО «ПромА», г. Орел; типа Д производства НПК «ВИЛ», г. Екатеринбург; для преобразователей абсолютного давления типа РА-8 производства фирмы Keller, Швейцария. Данные, представленные на фиг.1 были получены для измерительного преобразователя давления ПДИ-01 с чувствительным элементом типа РА-8 производства фирмы Keller. По паспортным данным полная приведенная погрешность (основная плюс дополнительная статическая температурная) используемого датчика составляет ±0,1%, что в абсолютном выражении равно ±0,6 кгс/см2 при пределе измерения 600 кгс/см2. Значение полной погрешности не учитывает наличие динамической составляющей температурной погрешности. В то же время, эта погрешность существенна. В проведенном эксперименте она составила 0,35 кгс/см2 (0,058%), что оказалось соизмеримым с полной погрешностью.
Для обработки данных эксперимента был сформирован виртуальный канал определения скорости изменения выходной величины дополнительного канала (канала температуры) и вычислен массив значений скорости изменения температуры чувствительного элемента датчика давления, синхронный со значениями массивов выходных величин других каналов. После обработки экспериментальных данных была получена математическая модель канала давления следующего вида:
где Р - значения выходного сигнала основного канала (канала измерения давления); Т - значения выходного сигнала дополнительного канала (канала измерения температуры); Vt - значения выходного сигнала виртуального канала (канала определения скорости изменения температуры); ajik - массив параметров математической модели преобразователя; n, m, l - порядок математической модели.
В соответствии с предложенной математической моделью получены следующие результаты обработки экспериментальных данных. Они приведены на фиг.2, где показаны результаты обработки способом-прототипом (график 1) и предложенным способом (график 2).
Как видно на фиг.2, предложенный способ, кроме статической коррекции (область В), устраняет всплески значений в канале давления, вызванные динамикой температуры (область А).
Поставленная цель изобретения - повышение точности измерений достигается следующим образом. Стабилизация основного параметра и ступенчатое изменение влияющего параметра позволяют получить различные значения скорости изменения влияющего параметра внутри чувствительного элемента измерительного преобразователя. Выделение виртуального канала позволяет сформировать дополнительный массив данных, содержащий сведения о скорости изменения влияющей величины в чувствительном элементе датчика, тем самым, характеризуя динамику помехи. Формирование математической модели путем нахождения аналитической взаимосвязи выходных значений основного, дополнительного и виртуального каналов с входными величинами преобразователя позволяет учесть в модели как статическую, так и динамическую коррекцию. Причем, при отсутствии динамики влияющего фактора будет действовать только статическая коррекция. При определении основной входной величины по параметрам полученной математической модели учитываются и статическая, и динамическая составляющие погрешности, и, тем самым, повышается точность измерения.
Таким образом, предложенный способ позволяет повысить точность измерений за счет устранения дополнительной динамической температурной погрешности. Предлагаемое изобретение может быть использовано в различных отраслях промышленности, где измерения производятся в условиях действия нестационарных помех.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 1996 |
|
RU2130194C1 |
| СПОСОБ КОРРЕКЦИИ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2002 |
|
RU2199088C1 |
| СПОСОБ КОРРЕКЦИИ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2002 |
|
RU2199089C1 |
| Способ метрологической диагностики измерительных каналов уровня жидкости | 2018 |
|
RU2680852C1 |
| ДАТЧИК ДАВЛЕНИЯ | 2013 |
|
RU2523754C1 |
| Способ оценки и коррекции динамической погрешности измерительного преобразователя температуры | 2023 |
|
RU2818500C1 |
| СПОСОБ КОРРЕКЦИИ СТАТИЧЕСКОЙ ХАРАКТЕРИСТИКИ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2333523C2 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ НЕЭЛЕКТРИЧЕСКОЙ ВЕЛИЧИНЫ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ | 1995 |
|
RU2087857C1 |
| СИСТЕМА УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2012 |
|
RU2501964C1 |
| УЗЕЛ КВАРЦЕВОГО ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ ДАВЛЕНИЯ И ТЕМПЕРАТУРЫ С ДИНАМИЧЕСКОЙ КОРРЕКЦИЕЙ | 2010 |
|
RU2572053C2 |
Изобретение относится к измерительной технике. Способ заключается в выделении в преобразователе каналов измерения основной и дополнительной (влияющей) входных величин, градуировке каналов измерительного преобразователя при различных комбинациях значений его входных величин, формировании по результатам градуировки математической модели измерительного преобразователя в виде совокупности ее параметров, связывающей значения выходных величин со значениями входных величин, и определении значения основной входной величины по параметрам математической модели и текущим значениям выходных величин, причем при проведении градуировочного эксперимента стабилизируют основную входную величину в нескольких точках диапазона преобразования, в каждой точке стабилизации основной входной величины осуществляют ступенчатое изменение влияющей входной величины в пределах диапазона ее изменения с различными начальными значениями и различными по знаку и но амплитуде приращениями, фиксируют поведение во времени значений входных и выходных величин измерительных каналов основной и влияющей входных величин, организуют дополнительный виртуальный канал определения скорости изменения значений выходной величины канала измерения влияющей величины, после чего формируют математическую модель, связывающую выходные значения основного, дополнительного и виртуального каналов с входными величинами преобразователя, и, наконец, определяют текущее значение основной входной величины по параметрам математической модели и текущим значениям выходных величин основного, дополнительного и виртуального измерительных каналов. Технический результат заключается в повышении точности измерения. 2 ил.
Способ коррекции характеристик измерительных преобразователей, включающий выделение в преобразователе каналов измерения основной и дополнительной входных величин, градуировку каналов измерительного преобразователя при различных комбинациях значений его входных величин, формирование по результатам градуировки математической модели измерительного преобразователя в виде совокупности ее параметров, связывающей значения выходных величин со значениями входных величин, и определение значения основной входной величины по параметрам математической модели и текущим значениям выходных величин, отличающийся тем, что сначала проводят градуировочный эксперимент, в процессе которого стабилизируют основную входную величину в нескольких точках диапазона преобразования, в каждой точке стабилизации основной входной величины осуществляют ступенчатое изменение влияющей входной величины в пределах диапазона ее изменения с различными начальными значениями и различными по знаку и по амплитуде приращениями, фиксируют поведение во времени значений входных и выходных величин измерительных каналов основной и влияющей входных величин, организуют дополнительный виртуальный канал определения скорости изменения значений выходной величины канала измерения влияющей величины, после чего формируют математическую модель, связывающую выходные значения основного, дополнительного и виртуального каналов с входными величинами преобразователя, и, наконец, определяют текущее значение основной входной величины по параметрам математической модели и текущим значениям выходных величин основного, дополнительного и виртуального измерительных каналов.
| СПОСОБ КОРРЕКЦИИ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 1996 |
|
RU2130194C1 |
| СПОСОБ ГРАДУИРОВКИ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ С ИНТЕГРИРОВАННЫМ ЧУВСТВИТЕЛЬНЫМ ЭЛЕМЕНТОМ | 2002 |
|
RU2223465C1 |
| СПОСОБ КОРРЕКЦИИ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2002 |
|
RU2199088C1 |
| Измерительный преобразователь с коррекцией характеристики | 1985 |
|
SU1429088A1 |
| Способ автоматической коррекции характеристик регулятора частоты электроэнергетического агрегата | 1981 |
|
SU1035769A1 |
| Устройство для коррекции характеристик измерительных преобразователей | 1982 |
|
SU1100630A1 |

