Изобретение относится к измерительной технике и может быть использовано для коррекции статических характеристик измерительных преобразователей, имеющих несколько измерительных каналов, обладающих сложными нелинейными функциями преобразования, которые зависят от нескольких измеряемых величин, выступающих в качестве влияющих факторов.
Известны способы коррекции статических характеристик измерительных преобразователей, у которых имеется несколько измерительных каналов, чувствительных к нескольким измеряемым величинам [1]. Компенсация влияния других, кроме основного, влияющих факторов на показания отдельного измерительного канала достигается путем измерения каждого дополнительного влияющего фактора с помощью отдельного датчика, воспринимающего только этот влияющий фактор, и последующей аддитивной и (или) мультипликативной коррекции его влияния как помехи. Данные способы коррекции просто автоматизируются, как правило, аппаратным путем, но являются узкодиапазонными и сложными в настройке.
Известен способ коррекции статических характеристик многоканальных измерительных преобразователей [2] , обеспечивающий линеаризацию характеристик каналов измерительного преобразователя и компенсацию влияния других, кроме основного, влияющих факторов на показания отдельного измерительного канала, который заключается в измерении значений выходных величин измерительного преобразователя при различных комбинациях его входных величин, контролируемых с помощью эталонных измерительных каналов, отборе по результатам измерений выборок данных и определении в ходе итеративного процесса поиска, путем графических построений, значений калибровочных (градуировочных) функций измерительных каналов во всех точках тестового эксперимента.
Множество представлений калибровочных функций измерительных каналов в виде таблиц используется в рамках данного способа для преобразования кодов выходных величин многоканального измерительного преобразователя в оцениваемые значения измеряемых входных величин. Это преобразование является обратным преобразованию, которое реализуется многоканальным измерительным преобразователем и описывается его математической моделью.
Данный способ коррекции, принятый за прототип, из-за использования графических построений является трудоемким и плохо автоматизируемым, а также не обеспечивает для измерительных преобразователей со сложными нелинейными функциями преобразования требуемой точности измерения во всех частях широкого диапазона измеряемых величин.
Изобретение решает задачу обеспечения условий для автоматизации, с помощью обучающихся систем на основе искусственных нейронных сетей, процедур коррекции статических характеристик многоканальных измерительных преобразователей со сложными нелинейными функциями преобразования с достижением требуемой точности измерения во всех частях широкого диапазона измеряемых величин.
Указанная задача решается тем, что в способе коррекции статических характеристик измерительных преобразователей, включающем измерения значений выходных величин измерительного преобразователя при различных комбинациях его входных величин, контролируемых с помощью эталонных измерительных каналов, согласно изобретению измеряемые входные величины преобразователя сравнивают в блоке сравнения обучающейся системы с оценками измеряемых величин, полученных с помощью искусственной нейронной сети на выходе блока калибрующих функций обучающейся системы на соответствие заданным требованиям к точности измерения входных величин преобразователя, определяют с помощью искусственной нейронной сети блока настройки обучающейся системы веса ошибок, полученных в окрестностях рабочих точек преобразователя, и с помощью весов ошибок регулируют активность нейронов скрытого слоя искусственной нейронной сети калибрующих функций обучающейся системы.
Сущность предлагаемого способа коррекции статических характеристик многоканальных измерительных преобразователей иллюстрируется фиг.1 и 2.
На фиг. 1, а в виде координатной сети (номограммы) графически представлена математическая модель сложной нелинейной векторной функции преобразования F= (f1,...,fn), реализуемой многоканальным измерительным преобразователем в окрестностях рабочих точек А и В:
y1=f1(x1,...,xn),...yn=fn(x1,...xn),
где (x1,...,xn)- вектор входных измеряемых преобразователем величин;
(у1,...уn) - вектор кодов выходных величин преобразователя.
На фиг.1, б в виде координатной сети в окрестностях рабочих точек А и В представлена математическая модель векторной функции преобразования G=(g1,.. .,gn), описывающей множество калибрующих функций,
где  - оценки измеряемых величин, полученные после коррекции статических характеристик преобразователя.
- оценки измеряемых величин, полученные после коррекции статических характеристик преобразователя.
Множество статических характеристик (функций) многоканального преобразователя описывается в виде векторной функции
H=GF=(h1,...hn)
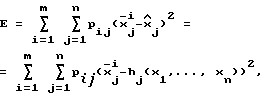
Процесс коррекции статических характеристик (функций) измерительного преобразователя может быть сведен к минимизации квадратических ошибок по каждому измерительному каналу в окрестностях всех рабочих точек преобразователя, т.е. к поиску минимума функционала полной ошибки: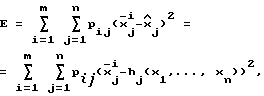
где рij - вес ошибки, полученной в окрестности i -й рабочей точки по j-у каналу; - значение j-й входной величины преобразователя, измеренной в его i-й рабочей точке путем контроля с помощью соответствующего эталонного измерительного канала.
- значение j-й входной величины преобразователя, измеренной в его i-й рабочей точке путем контроля с помощью соответствующего эталонного измерительного канала.
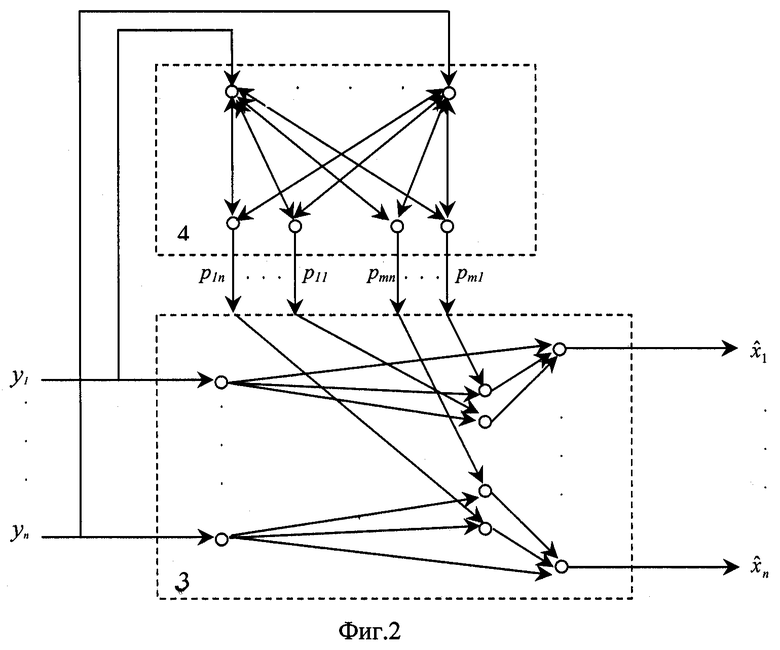
На фиг.1,в и 2 показан пример реализации предлагаемого способа. Коды выходных величин многоканального измерительного преобразователя 1 поступают на входы обучающейся системы 2, включающей блоки калибрующих функций 3, настройки 4 и сравнения 5. В качестве блока калибрующих функций используется искусственная нейронная сеть с прямым распространением сигналов, а в качестве блока настройки - искусственная нейронная сеть с обратными связями.
В блоке сравнения происходит контроль точности измерения входных величин преобразователя, периодически измеряемых также с помощью эталонных измерительных каналов 6, путем сравнения их с оценками измеряемых величин на выходе блока калибрующих функций. Если ошибки, полученные при измерениях в окрестности i-й рабочей точки, не удовлетворяют заданным требованиям к точности измерения входных величин преобразователя, то с помощью сигнала 7 инициируется новый этап итеративного процесса обучения искусственной нейронной сети блока калибрующих функций 3. В качестве правила ее обучения используется модифицированное δ-правило, учитывающее вес ошибки рij, полученной в окрестности i-й рабочей точки по j-у каналу.
Вес ошибки рij определяется с помощью искусственной нейронной сети блока настройки 4, обладающей ассоциативной памятью и различающей окрестности разных рабочих точек многоканального измерительного преобразователя. С помощью весов ошибок рij регулируется активность нейронов скрытого слоя искусственной нейронной сети блока калибрующих функций 3.
Если после нового этапа обучения для отдельных измерительных каналов заданные требования 8 к точности измерения входных величин преобразователя выполняются, то их используют вместо эталонных измерительных каналов.
При наличии функциональных связей между измеряемыми величинами, например балансовых отношений между измеряемыми расходами потоков в узлах инженерной сети, в качестве дополнительных условий окончания процесса обучения искусственных нейронных сетей используют заданные требования 9 к известным функциональным связям между измеренными значениями. Это позволяет обнаружить и скомпенсировать дрейф нуля одних функционнально связанных измерительных каналов на основе других эталонных каналов преобразователя.По сравнению с полиномиальной аппроксимацией передаточных функций измерительных каналов, как принято в прототипе, предложенная нейросетевая аппроксимация с автоматической коррекцией статических характеристик каналов позволила существенно уменьшить полную ошибку аппроксимации и добиться требуемой точности измерения в окрестностях рабочих точек более широкого диапазона измеряемых величин. Достигнутое улучшение статических характеристик реализовано программным путем на базе нейроконтроллера и не потребовало никаких ручных операций.
Предлагаемый нейросетевой способ коррекции статических характеристик измерительных преобразователей может быть использован в различных отраслях промышленности, где выполняются совместные измерения нескольких физических величин. В частности, изобретение может найти применение при точном контроле распределений давления, расхода и температуры в магистральных трубопроводных системах транспорта газа, нефти и нефтепродуктов, а также в системах их сбора и распределения.
Преимуществами предложенного нейросетевого способа коррекции статических характеристик измерительных преобразователей являются возможность автоматизации их калибровки и поверки; возможность уменьшения полной ошибки аппроксимации с достижением требуемой точности измерения по каждому измерительному каналу в широком диапазоне измеряемых величин. Основное требование к каналам преобразователя - обеспечение относительной стабильности их передаточных функций во времени по сравнению с динамикой изменения совместно измеряемых физических величин, возможность автоматизации процедур калибровки и поверки преобразователей.
Источники информации
1. Левшина Е. С., Новицкий П.В. Электрические измерения физических величин. - Л.: Энергоиздат, 1983, с.103 и 104.
2. Патент 2130194(РФ) Способ коррекции статических характеристик измерительных преобразователей // Емец С.В. Опубл. Бюл. 13, 1999.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2002 |
|
RU2199088C1 |
| Система для разработки интеллектуального датчика | 2019 |
|
RU2714039C1 |
| МЕТОД РЕЗЕРВИРОВАНИЯ КАНАЛОВ КОНСТРУКТИВНО-ФУНКЦИОНАЛЬНЫХ МОДУЛЕЙ БОРТОВЫХ ЦИФРОВЫХ ВЫЧИСЛИТЕЛЕЙ ЛЕТАТЕЛЬНЫХ АППАРАТОВ НА ОСНОВЕ ИНТЕЛЛЕКТУАЛЬНОЙ ДИАГНОСТИЧЕСКОЙ СИСТЕМЫ В УСЛОВИЯХ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2021 |
|
RU2778366C1 |
| УСТРОЙСТВО ТЕХНИЧЕСКОГО ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ | 2024 |
|
RU2831917C1 |
| СПОСОБ ДИАГНОСТИКИ ТЕХНИЧЕСКОГО СОСТОЯНИЯ И ОЦЕНКИ ОСТАТОЧНОГО РЕСУРСА ЭЛЕКТРОМЕХАНИЧЕСКОГО АГРЕГАТА С АСИНХРОННЫМ ДВИГАТЕЛЕМ | 2016 |
|
RU2626231C1 |
| СПОСОБ КОРРЕКТИРОВКИ ОШИБКИ ИЗМЕРЕНИЯ ГЛУБИНЫ TOF-КАМЕРЫ | 2021 |
|
RU2770153C1 |
| Способ калибровки интеллектуальных датчиков | 2019 |
|
RU2730367C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ БЕЗ УЧИТЕЛЯ С АВТОМАТИЧЕСКИМ ОПРЕДЕЛЕНИЕМ ПАРАМЕТРОВ ОБУЧЕНИЯ МОДЕЛЕЙ | 2023 |
|
RU2818858C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ КОМПЛЕКСА БОРТОВОГО ОБОРУДОВАНИЯ ВОЗДУШНЫХ СУДОВ НА ОСНОВЕ МАШИННОГО ОБУЧЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2023 |
|
RU2816667C1 |
| СПОСОБ РЕГУЛЯРИЗАЦИИ ГРАДИЕНТОВ ПРИ ОБУЧЕНИИ ГЛУБОКОЙ НЕЙРОННОЙ СЕТИ В АЛГОРИТМЕ УВЕЛИЧЕНИЯ ЧАСТОТЫ КАДРОВ ВИДЕОИЗОБРАЖЕНИЯ С ОПЕРАЦИЕЙ ДЕФОРМАЦИИ ИЗОБРАЖЕНИЯ И РЕАЛИЗУЮЩИЕ ДАННЫЙ СПОСОБ УСТРОЙСТВО И МАШИНОЧИТАЕМЫЙ НОСИТЕЛЬ | 2024 |
|
RU2838424C1 |
Изобретение относится к измерительной технике. Способ включает получение значений выходных величин преобразователя при различных комбинациях входных величин и их обратное преобразование в оцениваемые значения входных величин с аппроксимацией передаточных функций преобразователя, а также измерение входных величин с помощью эталонных измерительных каналов. Отличие заключается в том, что аппроксимацию осуществляют в обучающей системе с помощью искусственной нейронной сети калибрующего блока. В блоке сравнения обучающей системы сравнивают оценки входных величин с измеренными в эталонных измерительных каналах на соответствие заданным требованиям к точности оценки входных величин и определяют с помощью искусственной нейронной сети блока настройки обучающей системы веса ошибок, полученных в окрестностях рабочих точек преобразователя по каждому измерительному каналу. С учетом весов ошибок регулируют активность нейронов скрытого слоя искусственной нейронной сети блока калибровочных функций обучающей системы, минимизируя функционал полной ошибки аппроксимации. Изобретение обеспечивает требуемую точность измерения во всем диапазоне измеряемых величин. 2 з.п. ф-лы, 2 ил.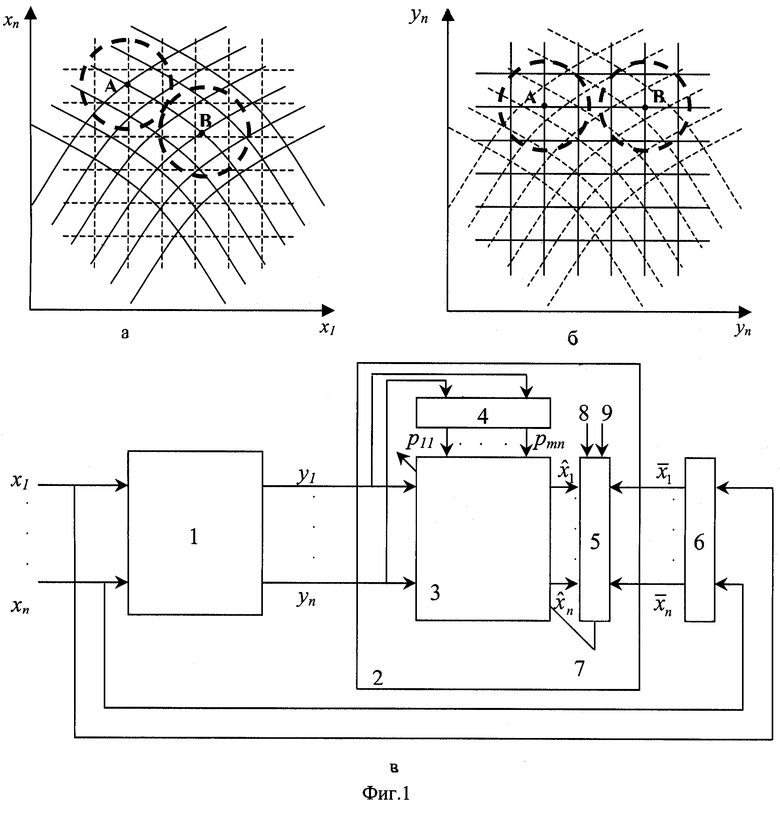
где рij - вес ошибки, полученной в окрестности i-й рабочей точки по j-у измерительному каналу преобразователя; - значение j-й входной величины преобразователя, измеренной в его i-й рабочей точке с помощью соответствующего эталонного измерительного канала;
- значение j-й входной величины преобразователя, измеренной в его i-й рабочей точке с помощью соответствующего эталонного измерительного канала; - оценка j-й входной величины преобразователя, полученной после коррекции его статической характеристики;
- оценка j-й входной величины преобразователя, полученной после коррекции его статической характеристики;
hj - статическая характеристика j-го измерительного канала преобразователя.
| СПОСОБ КОРРЕКЦИИ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 1996 |
|
RU2130194C1 |
| RU 99111601 А, 27.04.2001 | |||
| RU 2174218 С2, 27.09.2001 | |||
| ДАТЧИК С МНОГОФУНКЦИОНАЛЬНОЙ РЕГУЛИРОВКОЙ | 1991 |
|
RU2125711C1 |

