Изобретение относится к измерительной технике и может быть использовано для коррекции статических характеристик измерительных преобразователей, у которых можно выделить несколько измерительных каналов, обладающих нелинейными передаточными функциями и подверженных взаимному влиянию.
Известны способы коррекции статических характеристик измерительных преобразователей, у которых можно выделить несколько измерительных каналов, оказывающих взаимное влияние друг на друга. Устранение взаимного влияния каналов друг на друга осуществляют путем измерения влияющего фактора с помощью отдельного датчика, воспринимающего только влияющий фактор, и последующей аддитивной и (или) мультипликативной коррекцией влияния помехи. Например, известен способ коррекции статических характеристик интегральных тензопреобразователей [1], использующий для балансировки, градуировки, коррекции температурного дрейфа нуля и чувствительности измерительного канала пассивные и активные схемы, предполагающие включение в состав мостовой схемы активных сопротивлений и (или) термисторов или включение самой мостовой схемы в состав некоторой активной схемы. Исключение влияния температуры на канал давления достигают при этом за счет введения явного или неявного канала измерения температуры, обеспечивающего или соответствующую коррекцию характеристик канала давления, или термостабилизацию всего преобразователя. Подобные способы коррекции взаимного влияния каналов и нелинейности их характеристик являются аппаратными, что приводит к усложнению устройств. Кроме того, аппаратные способы коррекции, как правило, достигают наилучших результатов только в ограниченном диапазоне входных величин.
Прототипом изобретения является способ коррекции статических характеристик измерительных преобразователей [2] . Он заключается в проведении тестового эксперимента с измерением значений выходных величин измерительного преобразователя при различных комбинациях его входных величин, одна из которых является измеряемой физической величиной, а другая - помехой по отношению к первой. На следующем этапе формируют матрицу экспериментальных данных по результатам тестового эксперимента и получают математическую модель преобразователя в виде двух наборов коэффициентов, каждый из которых однозначно описывает поверхность передаточной функции своего измерительного канала. Решая обратную задачу, по параметрам математической модели определяют линии пересечения поверхностей передаточных функций с соответствующими плоскостями выходных величин каналов и их проекций на плоскость входных величин. После этого находят значения входных величин каждого измерительного канала в условиях их взаимного влияния и нелинейности передаточных функций путем вычисления координат точки пересечения проекций.
Упомянутый способ позволяет добиться высокой точности при обработке градуировочных данных, не содержащих случайные выбросы. В реальных условиях эмпирические данные, участвующие в тестовом эксперименте, содержат некоторую ошибку измерения, в том числе выбросы или провалы, что отрицательно сказывается при определении параметров математической модели измерительного преобразователя и, в конечном итоге, неизбежно приводит к снижению точности измерений.
Изобретение решает задачу уменьшения погрешности от влияния случайных выбросов экспериментальных данных, полученных в результате градуировочного эксперимента, и повышение точности измерительных преобразователей.
Указанная задача решается тем, что проводят тестовый эксперимент с измерением значений выходных величин измерительного преобразователя при различных комбинациях его входных величин, одна из которых является измеряемой физической величиной, а другая - помехой по отношению к первой, формируют матрицу экспериментальных данных по результатам тестового эксперимента, обрабатывают матрицу экспериментальных данных по одному из способов аппроксимации и получают в результате этого математическую модель преобразователя в виде двух наборов коэффициентов, каждый из которых однозначно описывает поверхность передаточной функции своего измерительного канала, определяют линии пересечения поверхностей передаточных функций с соответствующими плоскостями выходных величин каналов и их проекций на плоскость входных величин, находят значения входных величин каждого канала в условиях их взаимного влияния и нелинейности передаточных функций путем вычисления координат точки пересечения проекций, причем согласно изобретению аппроксимацию экспериментальных данных производят с учетом поправочных коэффициентов, определяемых как величины, функционально связанные с отклонением расчетных значений, полученных в соответствии с математической моделью, от истинных значений измеряемых величин в узловых точках матрицы экспериментальных данных.
Сущность предлагаемого способа коррекции статических характеристик измерительных преобразователей проиллюстрируем при помощи преобразователя с двумя влияющими друг на друга измерительными каналами. Предположим, что х1, х2 - входные величины, a у1 и у2 - выходные величины, являющиеся функциями величин, действующих на его входе, т.е. у1=f1(x1, х2), а у2=f2(x1, х2). Функции преобразования измерительных каналов преобразователя y1 и у2 аналитически описываются следующим образом. При всех значениях величины х2, участвовавших в тестовом эксперименте, проводится аппроксимация функций у1=f(x1). Результатом аппроксимации будут значения параметров функций f(x1), индивидуальные для каждого значения x2. После этого каждый параметр функции f(x1) аппроксимируют по величине х2. Полученные в результате коэффициенты и будут в конечном счете задавать функцию преобразования у1. Аналогичным образом задается передаточная функция у2=f2(x1, х2). Расчетные значения входных величин в узловых точках матрицы экспериментальных данных получают путем решения обратной задачи с использованием полученной математической модели. Затем определяют значения погрешностей приближения расчетных значений, полученных в соответствии с математической моделью, к истинным значениям измеряемых величин в узловых точках матрицы экспериментальных данных как разность истинного и расчетного значений входных величин.
Разные способы аппроксимации имеют соответствующие критерии достижения близости аппроксимирующих функций к экспериментальным данным. Так, метод наименьших квадратов в качестве такого критерия использует минимум суммы квадратов отклонений экспериментальных значений от значений, полученных с помощью аппроксимирующей функции.
На следующем этапе реализации способа производят коррекцию параметров математической модели измерительного преобразователя путем повторного ее определения с учетом поправочных коэффициентов, определяемых как величины, функционально связанные со значениями погрешностей в узловых точках матрицы экспериментальных данных. Данные поправочные коэффициенты учитываются в критерии соответствующего способа аппроксимации по достижению оптимального приближения к экспериментальным данным. В частном случае, при использовании в качестве способа аппроксимации метода наименьших квадратов вместо критерия
используется следующая форма с учетом поправочных коэффициентов:
В формулах (1) и (2) уi - значение выходных, xi - значение входных величин, f(x) - аппроксимирующая функция, n - число точек, участвующих в эксперименте, ki - поправочный коэффициент i-той точки данных, определяемый, в частности, как ki= 1/еi, где еi - погрешность приближения в i-й точке матрицы экспериментальных данных.
Процесс определения поправочных коэффициентов, а затем и параметров математической модели повторяют в итерационном цикле, критерием выхода из которого может служить, например, разность приведенных погрешностей в узловых точках матрицы экспериментальных данных, рассчитанных на двух соседних итерациях.
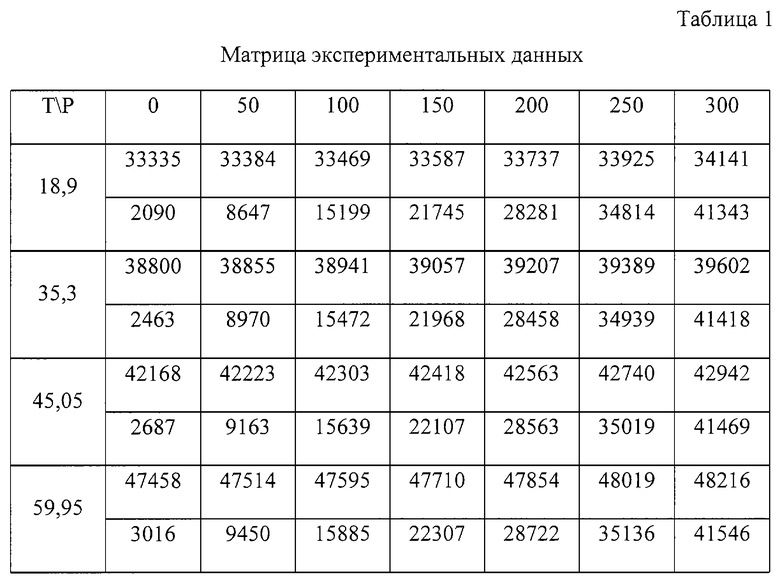
Предлагаемый способ прошел апробацию при коррекции статических характеристик интегральных преобразователей давления Д25. Основной входной величиной в этом случае являлось давление, а дополнительным параметром - температура. При проведении тестового эксперимента основная выходная величина представляла собой напряжение на измерительной диагонали датчика, а дополнительная выходная величина - напряжение на диагонали питания датчика. Выходные напряжения преобразовывались в код. Образцовые значения давления и температуры задавались грузопоршневым манометром МП-600 кл. точн. 0,05 и термостатом УТ-15 (температура контролировалась термометром ртутным кл. точн. 0,1) соответственно. Результаты тестового эксперимента приведены в таблице 1, где значения давления указаны в кГ/см2, значения температуры - в градусах Цельсия, значения выходных величин - в кодах, причем верхнее значение соответствует коду дополнительного канала, а нижнее значение - коду основного канала.
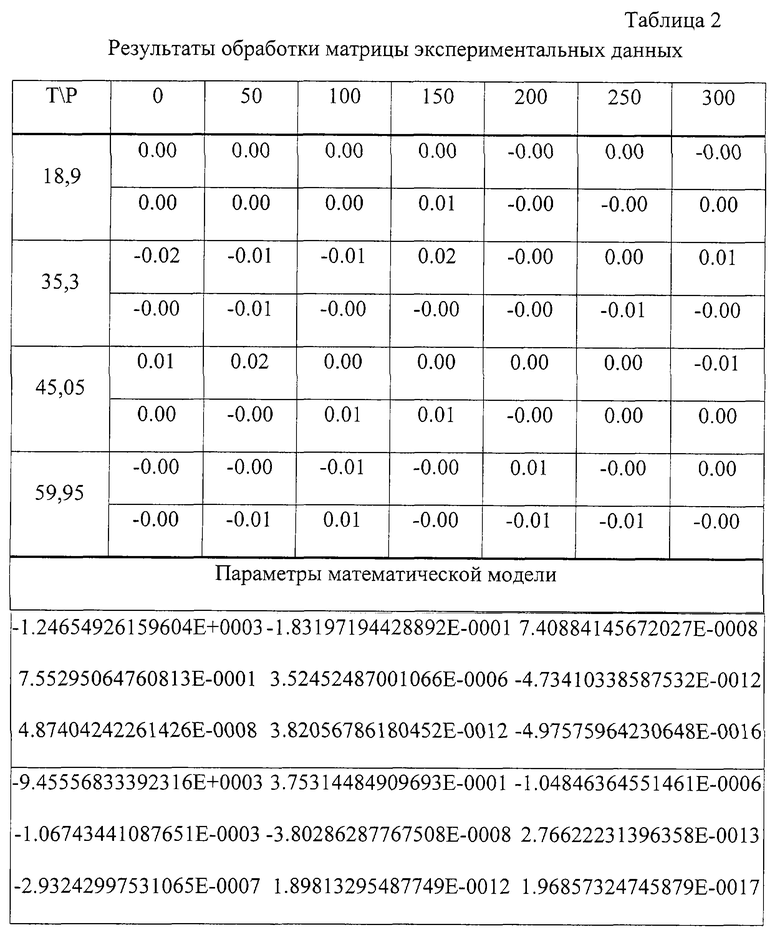
Функции преобразования каждого канала измерительного преобразователя аппроксимировались полиномами второго порядка методом наименьших квадратов. После этого с помощью полученных параметров математической модели во всех точках тестового эксперимента была решена задача определения пар значений давления и температуры по соответствующим парам кодов выходных величин преобразователя. В каждой точке тестового эксперимента были рассчитаны погрешности приближения расчетных и экспериментальных значений. Результаты расчета сведены в таблице 2. В верхней части таблицы представлены значения погрешностей: приведенные - по каналу давления (нижняя строка) и абсолютные - по каналу температуры (верхняя строка), а в нижней - параметры математической модели в виде двух наборов коэффициентов по каналу давления и температуры соответственно.
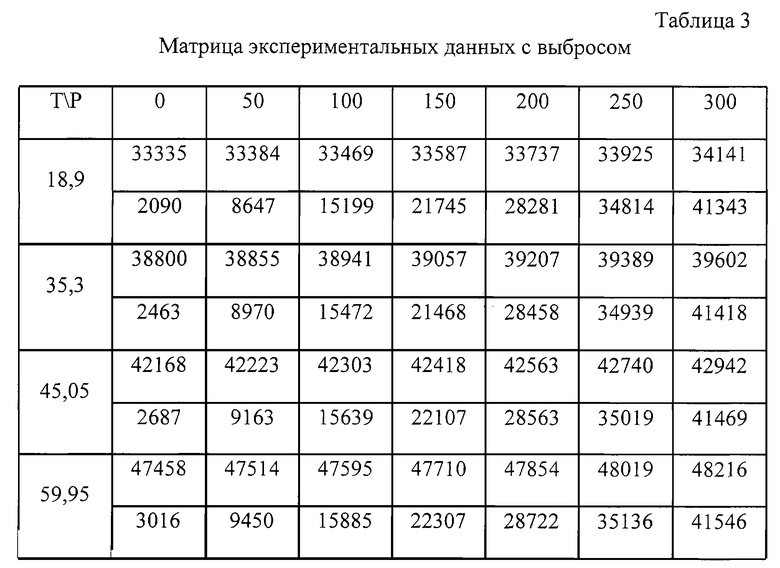
Для иллюстрации предложенного способа введем искусственно в матрице экспериментальных данных при температуре 35,3oС и давлении 150 кГ/см2 выброс по каналу давления, соответствующий изменению кода давления на 500 единиц (таблица 3).
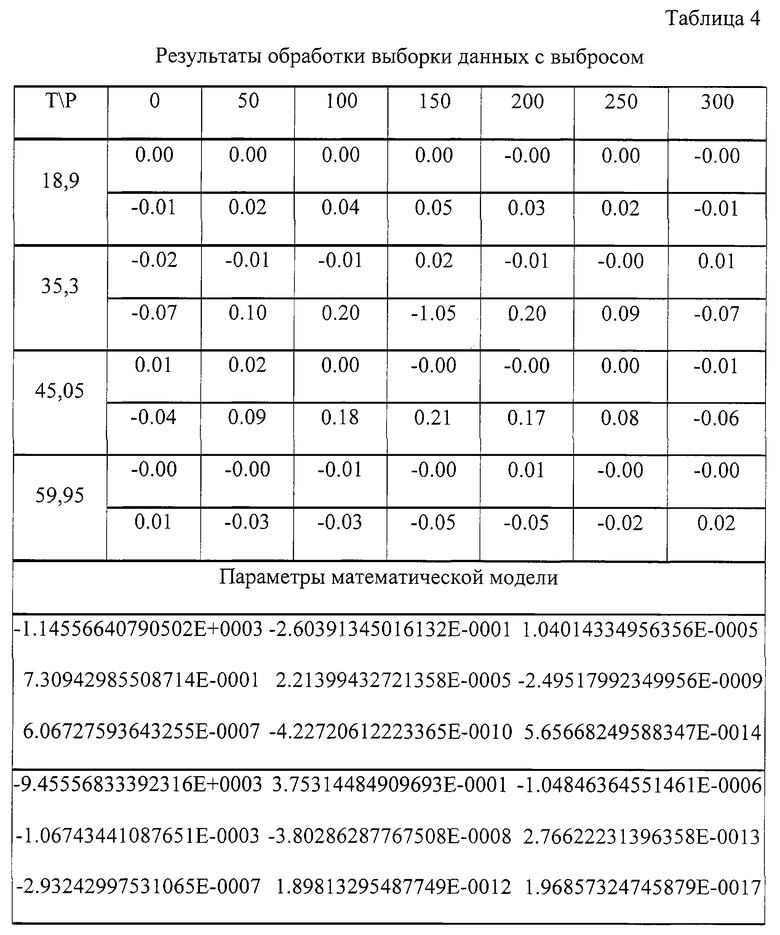
Проведем аналогичные расчеты по упомянутому выше методу коррекции статических характеристик измерительных преобразователей [2]. Результаты обработки загрязненной выборки данных сведены в таблице 4.
Как видно из таблицы 4, наибольшая приведенная погрешность по каналу давления, равная 1,05%, соответствует точке искусственно введенного выброса данных. Учет этой точки при обработке экспериментальных данных оказывает значительное влияние на общий вид (параметры) математической модели измерительного преобразователя, на что указывают большие значения погрешностей в остальных точках градуировочной таблицы.
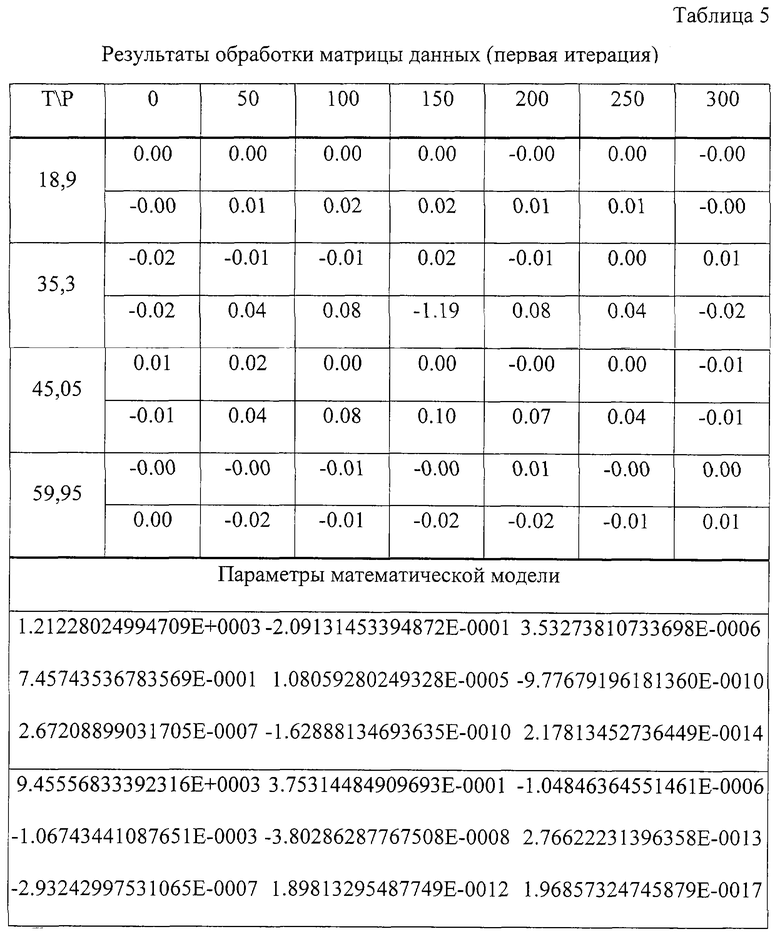
Обработаем матрицу экспериментальных данных (таблица 3) с учетом поправочных коэффициентов. В качестве критерия выхода из итерационного процесса, как вариант, примем разность погрешностей в узловых точках матрицы экспериментальных данных на двух соседних итерациях, равную 0,001%.
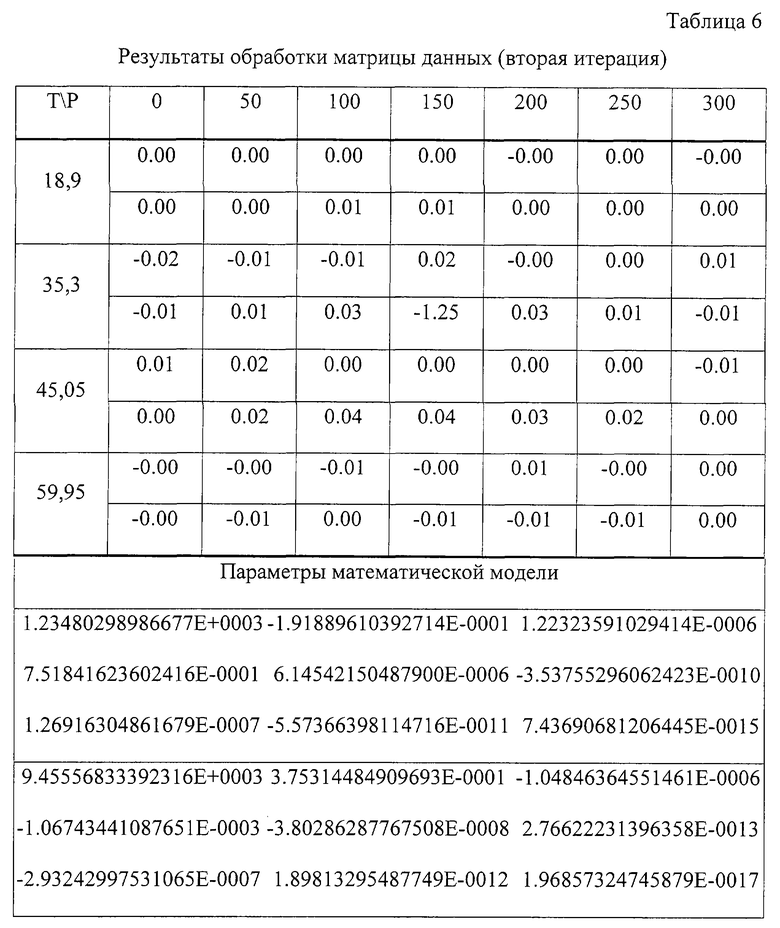
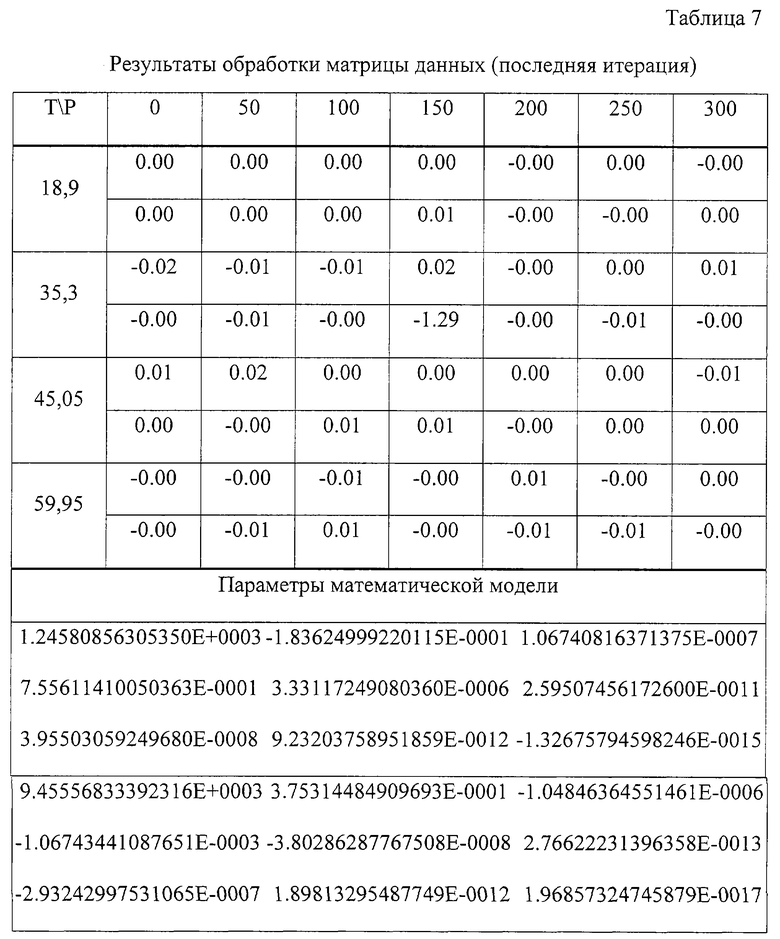
Результирующие значения погрешностей и параметры математической модели измерительного преобразователя после первой, второй и последней итераций (обработка матрицы экспериментальных данных завершилась за четыре итерации) сведены в таблицах 5, 6 и 7 соответственно.
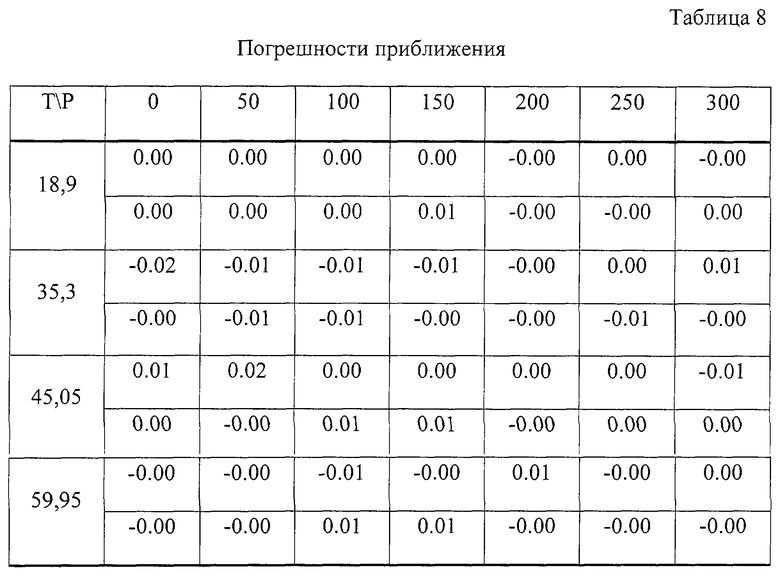
Из таблицы 7 видно, что значения приведенных погрешностей по каналу давления в окрестности точки искусственно введенного выброса уменьшились, вследствие чего можно считать, что в этом случае математическая модель измерительного преобразователя определена более корректно, чем в случае, представленном в таблице 4. Использование параметров скорректированной модели измерительного преобразователя (таблица 7) для получения истинных значений входных величин на основании исходных данных (таблица 1) дает следующие погрешности приближения в узловых точках матрицы экспериментальных данных (таблица 8).
Таким образом, предложенный способ коррекции статических характеристик позволяет достигнуть еще большей точности определения математической модели при обработке результатов градуировочных данных с выбросами и тем самым повысить точность последующих измерений и может быть использован в различных отраслях промышленности, где используются различные преобразователи, воспринимающие наряду с основной физической величиной дополнительные величины. В частности, изобретение может найти применение в машиностроении, приборостроении, нефтяной и нефтеперерабатывающей промышленности, в медицине и других отраслях народного хозяйства.
Преимуществами предлагаемого способа коррекции статических характеристик измерительных преобразователей являются:
- возможность автоматического исключения случайных выбросов при обработке экспериментальных данных;
- повышение точности определения параметров математической модели измерительного преобразователя при обработке экспериментальных данных, содержащих выбросы, и, как следствие, повышение точности измерений.
Источники информации
1. Ваганов В.И. Интегральные тензопреобразователи. М.: Энергоатомиздат, 1983, с. 76-94.
2. Пат. РФ 2130194, МКИ G 01 R 35/00. Способ коррекции статических характеристик измерительных преобразователей /С.В.Емец. - Опубл. БИ 13, 1999 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОРРЕКЦИИ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 1996 |
|
RU2130194C1 |
| СПОСОБ КОРРЕКЦИИ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2002 |
|
RU2199089C1 |
| СПОСОБ КОРРЕКЦИИ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 2012 |
|
RU2503968C1 |
| СПОСОБ КОРРЕКЦИИ СТАТИЧЕСКОЙ ХАРАКТЕРИСТИКИ ИЗМЕРИТЕЛЬНОГО ПРЕОБРАЗОВАТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2333523C2 |
| Способ динамической балансировки ротора в двух плоскостях коррекции | 2022 |
|
RU2790897C1 |
| СПОСОБ ГРАДУИРОВКИ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ С ИНТЕГРИРОВАННЫМ ЧУВСТВИТЕЛЬНЫМ ЭЛЕМЕНТОМ | 2002 |
|
RU2223465C1 |
| СПОСОБ ИДЕНТИФИКАЦИИ ЛИНЕАРИЗОВАННОГО ДИНАМИЧЕСКОГО ОБЪЕКТА | 2003 |
|
RU2256950C2 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ НЕЭЛЕКТРИЧЕСКОЙ ВЕЛИЧИНЫ В ЭЛЕКТРИЧЕСКИЙ СИГНАЛ | 1995 |
|
RU2087857C1 |
| СПОСОБ КАЛИБРОВКИ ИЗМЕРИТЕЛЬНЫХ СИСТЕМ | 2002 |
|
RU2262713C2 |
| Способ оценки и коррекции динамической погрешности измерительного преобразователя температуры | 2023 |
|
RU2818500C1 |
Изобретение относится к измерительной технике. Способ включает проведение тестового эксперимента с измерением значений выходных величин преобразователя при различных комбинациях входных величин, одна из которых является измеряемой физической величиной, а другая - помехой. Формируют матрицу экспериментальных данных, обрабатывают ее аппроксимацией функций преобразования каждого измерительного канала и получают математическую модель преобразователя в виде двух наборов коэффициентов, каждый из которых описывает поверхность передаточной функции своего измерительного канала. Далее определяют линии пересечения поверхностей передаточных функций с плоскостями выходных величин каналов и их проекции на плоскость входных величин. Входные величины каждого канала находят вычислением координат точки пересечения проекций. Указанную аппроксимацию экспериментальных данных производят с поправочными коэффициентами, которые определяют как величины, связанные с отклонением расчетных значений, полученных в соответствии с математической моделью, от истинных значений измеряемых величин в узловых точках матрицы. Способ обеспечивает повышение точности измерительных преобразователей. 2 з. п. ф-лы, 8 табл.
ki=1/ei,
где еi - погрешность приближения,
а оптимальное приближение расчетных значений к экспериментальным осуществляют по критерию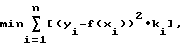
где уi и хi - значения выходных и входных величин,
f(xi) - аппроксимирующая функция,
n - число точек, участвующих в эксперименте.
| СПОСОБ КОРРЕКЦИИ СТАТИЧЕСКИХ ХАРАКТЕРИСТИК ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ | 1996 |
|
RU2130194C1 |
| RU 99111601 А, 27.04.2001 | |||
| RU 2174218 С2, 27.09.2001 | |||
| ДАТЧИК С МНОГОФУНКЦИОНАЛЬНОЙ РЕГУЛИРОВКОЙ | 1991 |
|
RU2125711C1 |

