1
Изобретение отнрсится к электротехнике и может быть использовано в устройствах, имеющих зазор в механических сочленениях силовых элементов,, например в металлорежущих станках, испытательных стендах и других общепромышленных механизмах, и является усовершенствованием устройства по авт.св. (с 1045219.
Цель изобретения - повышение быстродействия электропривода при выборе зазора.
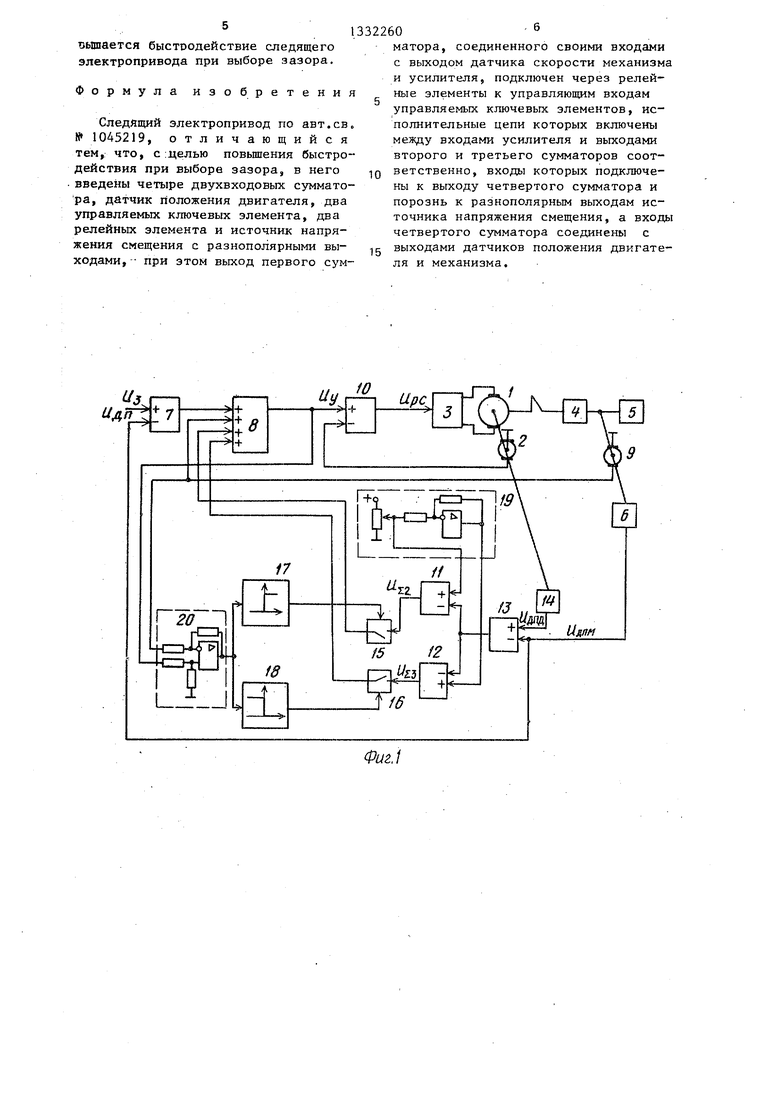
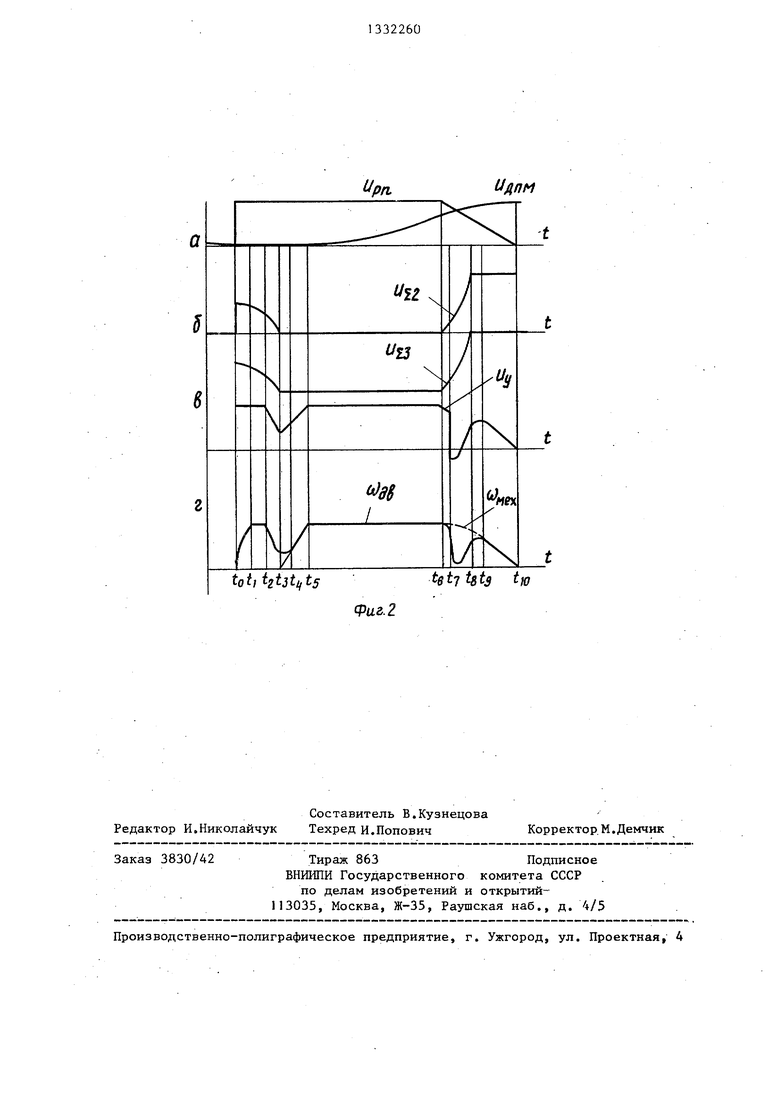
На фиг. 1 изображена функциональная схема электропривода; на фиг.2 - временные диаграммы, поясняющие работу электропривода.
Электропривод содержит электродвигатель 1 с° датчиком 2 скорости на валу, входом подключенный к преобразователю 3, механически соединенный редуктор 4 с люфтом- с исполнительным механизмом 5, датчик 6 положения исполнительного механизма, подключенный к входу регулятора 7 положения, выход которого подключен к первому входу усилителя 8, а также датчик 9 скорости исполнительного механизма и регулятор 10 скорости, выход которого подключен к входу преобразователя 3, первый вход - к выходу датчика 2 скорости двигателя, а второй вход - к выходу усилителя 8, второй вход которого подключен к выходу датчика 9 скорости исполнительного механизма. Электропривод содержит, кроме того, двухвходовые сумматоры 11-13, датчик 14 положения двигателя, управляемые ключевые элементы 15 и 16, релейные элементы 17, 18 и источник 19 напряжения смещения с разнополярными выходами, при этом выход сумматора 20, соединенного своими входами с выходами датчика 9 скорости механизма и усилителя 8,подключен через релейные элементы 17 и 18 к управляющим входам управляемых 1ключевых элементов 15 и 16, испол- |нительные цепи которых включены между входами усилителя 8 и выходами суматоров 11 и 12 соответственно, входы которых подключены к выходу сумматора 13 и порознь к разнополярным выходам источника 19 напряжения смещения, а входы сумматора 13 соединены с выходами датчиков 14 и 6 положения двигателя и механизма.
Электропривод работает следуюшзим образом.
3322602
В исходном состоянии с обоих датчиков 6 и 14 положения на сумматор 13 поступает сигнал, равный нулю. При этом выходной сигнал сумматора 13
. дпА
0
где ид„д
и.
выходной сигнал датчика положения двигателя; выходной сигнал датчика положения исполнительного механизма; равен нулю.
С разнополярных выходов источника g 19 напряжения смещения, выполненного на основе задающего потенциометра и инвертирующего усилителя, на положительные входы сумматоров 11 и 12 поступает сигнал ., величина которого пропорциональна величине зазора и равна
ЛЯ (V -- Кп,
где д 1 - максимальная величина зазо ра;
К п - коэффициент датчика положения.
В результате этого на выходе сумматора 1,1 уста 1авливается напряжение
0 . , а на выходе сумматора 12 - -U. Напряжение на выходе сумматора 20 равно нулю, так как равны нулю напряжения на ег о входах, и сигнал управления на ключи 15 и 16с релейных эле5 ментов 17 и 18 не поступает. Релейные элементы могут быть выполнены, например, на операционных усилителях, не охваченных отрицательной обратной связью. При этом сигнал на третьем
0 и четвертом входах усилителя 8 равен нулю.
Пусть в момент времени t (фиг.2) на вход регулятора 7 положения поступил положительный сигнал U, , ко5 торый приводит к насьш;ению регулятора положения, и его выходной сигнал становится равным а вьгходе усилителя 8 появляется напряжение и, которое через сумматор 20, воз0 действуя на вход релейного элемента 117, вызывает срабатьшание ключа 15, и к третьему входу усилителя 8 подключается выход сумматора 11, В результате этого на выходе усилителя
5 8 устанавливается напряжение „ За время двигатель разгоняет- ся и при большой величине зазора его частота вращения может достичь максимального значения U,
(фиг. 2г).
Одновременно ; с началом движения с датчика I4 положения двигателя начинает поступать сигнал
и,„,к,.ч ,
в результате чего на выходе сумматора 13 напряжение увеличивается, а на выходе сумматора 11 уменьшается (фиг. 26).
По этой причине в момент времени t, усилитель 8 вькодит из насыщения
За время
ч-ч
напряжение U,
уменьшается до напряжения, которому соответствует разность частот вращения двигателя и исполнительного механизма, обусловленная допустимым уровнем динамических перегрузок в механической передаче в момент зацепления. Коэффициент усилителя 8 по первому входу меньше единицы и равен
. к t TI
рп маис
где и - напряжение управления при входе в зацепление.
Скорость прохождения зазора в этом случае больше, чем при ограничении ее на всем интервале времени выборки зазора по условиям допустимых динамических перегрузок. Тем самым иовьш1ается быстродействие следящего электропривода при выборе зазора.
За время t.-t. происходит процесс зацепления и на (отрезке; времени tj-tj механизм разгоняется до максимальной скорости за счет появления в момент времени t на втором входе усилителя 8 сигнала положительной обратной связи с датчика 2 скорости двигателя. При этом третий вход усилителя 8 отключен от выхода сумматор 11. Коэффициент усилителя 8 по второ входу определяется из условия
„ (i( yf.Li vi v 11
Jneif.HMKC
где К - коэффициент датчика 9 скорости;
U
мех.макс
- максимально допустимая частота вращения механизма.
Механизм 5 движется с максимальной скоростью до момента времени t, ког- 55 да регулятор 7 положения выходит из насыщения, вследствие чего двигатель начинает тормозиться и теряет зацепление с механизмом. При этом меняет0
5
0
5
ся знак выходного сигнала сумматора 20, срабатывает второй релейный элемент 18 и выход сумматора 12 подключается к четвертому входу усилителя 8. В результате этого напряжение Uy резко уменьшается (фиг. 2в) и-происхог, дит интенсивное торможение двигателя. Скорость механизма до момента времени . tg меняется незначительно только под действием статического момента нагрузки. Изменение скорости двигателя обусловлено изменением сигналов с регулятора: 7 положения и сумматора 12,
В момент времени t, когда двига- тель вновь Входит в зацепление с механизмом, сигнал с сумматора 12 равен нулю и следовательно, разность между частотами вращения двигателя и исполнительного механизма не больше допустимой.
За время происходит зацепление механической передачи, сигнал с усилителя 8 становится рав- Hbw сигналу с датчика скорости исполнительного механизма и четвертый вход усилителя 8 отключается от входа сумматора 12,- после чего начинается эффективное торможение электропривода, определяемое темпом изменения сигнала с регулятора 7 положения.
В момент времени t, следящий электропривод отрабатывает заданное значение Uj . Эффект повьш1ения быстродействия электропривода при прохожде5 НИИ зазо.ра достигается подачей дополнительного сигнала на контур регулирования скорости. Этот сигнал-является функцией зазора между двигателем и исполнительным механизмом. В
О начальный момент выборки он имеет максимальное значение, что обеспечивает разгон двигателя до максимальной скорости. По мере прохождения зазора величина дополнитель- ,
5 ного сигнала уменьшается и в момент зацепления он равен нулю, поэтому скорость двигателя в этот момент определяется только сигналом регулятора 7 положения, значение которого на вы0 ходе усилителя 8 соответствует допустимому уровню динамических нагрузок в зацеплении.
0
Таким образом, за счет введения в известный следящий электропривод датчика положения двигателя, источника напряжения смещения с разнополярными выходами, двух релейных элементов, двух ключей и четырех сумматоров повышается быстродействие следящего электропривода при выборе зазора.
Формула изобретения
Следящий электропривод по авт.св. N 1045219, отличающийся тем, что, с:делью повьшения быстродействия при выборе зазора, в него введены четыре двухвходовых суммато- ра, датчик положения двигателя, два управляемых ключевых элемента, два релейных элемента и источник напряжения смещения с разнополярными выходами, - при этом выход первого сум
32260-
матора, соединенного своими входами с выходом датчика скорости механизма и усилителя, подключен через релейные элементы к управляющим входам управляемых ключевых элементов, исполнительные цепи которых включены между входами усилителя и выходами второго и третьего сумматоров соответственно, входы которых подключены к выходу четвертого сумматора и порознь к разнополярным выходам источника напряжения смещения, а входы четвертого сумматора соединены с выходами датчиков положения двигателя и механизма.
10
15
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий электропривод | 1987 |
|
SU1442973A1 |
| Следящий электропривод | 1988 |
|
SU1644084A1 |
| Следящий электропривод | 1981 |
|
SU1045219A1 |
| Следящий электропривод с компенсацией люфта | 1981 |
|
SU981929A1 |
| Электропривод перемещения механизма подачи станка | 1982 |
|
SU1115191A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Способ автоматического регулирования координат электропривода и устройство для его осуществления | 2017 |
|
RU2660183C1 |
| Следящий электропривод редукторных механизмов с компенсацией люфта | 1986 |
|
SU1388825A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2014 |
|
RU2580823C2 |
Изобретение относится к электротехнике и может быть использовано в устройствах, имеющих зазор в механических сочленениях силовых элементов, например, металлорежущих станков и испытательных стендов. Целью изобретения является повьппе- ние быстродействия. Поставленная цель достигается подачей дополнительного сигнала на контур регулирования скорости. Этот сигнал является функцией зазора между электродвигателем и исполнительным механизмом. В начальный момент выборки зазора он имеет максимальное значение, по мере прохождения зазора величина сигнала уменьшается и в момент зацепле- ния он равен нулю. Скорость электродвигателя в этот момент определяется только сигналом регулятора положения, значение которого соответствует допустимому уровню динамических нагрузок в зацеплении. 2 ил. с (Л Ео : ю N3 35 N)
Чдпм
s
Uii
UfS
/
xtf«
5
/
/
V/
/
totfiztstifts etjigts tfo
Фаг. 2
Редактор И.Николайчук
Составитель В.Кузнецова Техред И.Попович
Заказ 3830/42
Тираж 863Подписное
ВНШШИ Государственного комитета СССР
по делам изобретений и открытий- 113035, Москва, Ж-35, Раушская наб., д. /4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
6i
«ft
у
ч
Корректор. М.Демчик
| Следящий электропривод | 1981 |
|
SU1045219A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
