Изобретение относится к области вооружения, а именно к ракетной технике и, в частности, к ракетам, вращающимся по углу крена, и может быть использовано в ракетных комплексах, например в противотанковых с носителями на земле, в которых применяются, например, лучевые системы теленаведения.
Известны способ коррекции на ракете командного сигнала и система наведения ракеты для его реализации [«Основы радиоуправления». Под ред. Вейцеля В.А. и Типугина В.Н., Москва, «Сов. радио», 1973, стр.276-277, рис.5.3]. Способ коррекции на ракете командного сигнала заключается в том, что преобразуют электромагнитное излучение с пункта управления на ракете в составляющие командного сигнала, измеряют величину скорости полета ракеты, которой корректируют величины составляющих командного сигнала, и из корректированных составляющих вырабатывают командный сигнал управления ракетой.
Система наведения ракеты содержит аппаратуру пункта управления, а на ракете - последовательно включенные приемник и блок выделения координат, выходы по курсу и тангажу которого через корректирующий блок (блок поправки на скорость) соединены, соответственно, с первым и вторым входами автопилота, при этом третий вход корректирующего блока подключен к устройству измерения скорости полета ракеты.
В блок выделения координат входят канал сигнала ошибки, блок поправки на угол крена, опорный канал и преобразователь координат, а в автопилот - устройство формирования команд. Такая функциональная разбивка блоков в известном устройстве позволяет объединять системы теленаведения по лучу, основанные на круговом сканировании в пространстве информационного луча, на сканировании в пространстве информационного луча в вертикальной и горизонтальной плоскостях, на проецировании в пространство информационных «картинок», сформированных растрами, при котором отсутствует сканирование луча, и т.д.
В этом известном способе коррекции на ракете командного сигнала и системе наведения ракеты, основанной на нем, изменяют величины составляющих командного сигнала (Ukz и Uky), а значит, и величину командного сигнала (Uk) в зависимости от величины скорости полета ракеты (υсн), оказывающей влияние на эффективность рулей.
Однако изменение величины составляющих командного сигнала по величине скорости полета ракеты (снаряда) υсн является недостаточно эффективным при полете ракеты на малой высоте, например параллельно поверхности земли, что может привести к ее падению.
Следовательно, недостатком известных способа коррекции на ракете командного сигнала и системы наведения, основанной на нем, является недостаточно высокая эффективность коррекции величины командного сигнала на ракете в канале тангажа.
Задачей настоящего изобретения является повышение эффективности коррекции на ракете величины командного сигнала по тангажу за счет использования в качестве регулирующей величины относительное изменение скорости полета ракеты, что уменьшает вероятность падения ракеты из-за касания поверхности, например земли.
Поставленная задача решается в способе коррекции командного сигнала на ракете, вращающейся по углу крена, при котором электромагнитное излучение с пункта управления преобразуют на ракете в составляющие командного сигнала по курсу и тангажу и из скорректированной составляющей командного сигнала по танагажу и нескорректированной по курсу вырабатывают командный сигнал, дополнительно на ракете формируют креновый сигнал в виде электрических импульсов, длительности которых определяют равные по величине угловые интервалы, образуемые при вращении ракеты по углу крена, преобразуют длительности электрических импульсов в двоичные числа и вычисляют величину изменения скорости полета ракеты как отношение двух чисел, первое из которых соответствует длительности электрического импульса, принятого за начало отсчета, а второе - длительности каждого последующего импульса, начиная с импульса, принятого за начало отсчета, и величиной этого отношения корректируют величину составляющей командного сигнала по тангажу.
Система наведения ракеты, основанная на этом способе, содержит аппаратуру пункта управления, а на ракете - последовательно соединенные приемник и блок выделения координат, а также автопилот, в нее введены последовательно включенные датчик угла крена, блок вычисления величины ti/t0 и блок коррекции, при этом выход блока выделения координат по курсу соединен с первым входом автопилота, выход блока выделения координат по тангажу подключен ко второму входу блока коррекции, выход которого соединен со вторым входом автопилота, третий вход автопилота подключен к выходу датчика угла крена, где t0 и ti - длительности креновых импульсов, соответственно, принятых за начало отсчета и последующих, начиная с t0.
В предлагаемом изобретении заявленный способ реализуется следующим образом. Электромагнитное излучение с пункта управления в месте нахождения ракеты преобразуют в составляющие командного сигнала, например электрические сигналы (напряжения), соответствующие величинам координат по курсу (Ukz) и тангажу (Uky) относительно нуля в декартовой системе координат пункта управления, при этом нуль координат соответствует точке прицеливания. Поскольку ракета при полете вращается по углу крена, например, за счет разворота лопастей стабилизаторов, то датчиком угла крена на ракете формируют креновый сигнал, с помощью которого преобразуют скорректированную составляющую командного сигнала по тангажу и нескорректированную составляющую командного сигнала по курсу из неподвижных декартовых координат пункта управления в декартовые или полярные координаты ракеты, вращаемые по углу крена вместе с ней, т.е. из этих составляющих командного сигнала вырабатывают командный сигнал.
Датчик угла крена формирует креновый сигнал в виде электрических импульсов, длительность t которых определяется величиной угла ϕ, образуемого при вращении ракеты с угловой скоростью ω, при этом

Полет ракеты представляет собой винтовое движение, слагаемое из прямолинейного поступательного движения со скоростью υ и вращения вокруг своей оси с угловой скоростью ω [«Физический энциклопедический словарь». Гл. редактор A.M.Прохоров, Москва, «Сов. энциклопедия», 1984, стр.77], при этом

где р - параметр винта.
Отношение скорости полета ракеты, принятой за начало отсчета υ0 на временном отрезке t0 к скорости υi на соответствующем временном отрезке ti, с учетом выражений (1) и (2) равно:
где i=0, 1, 2,..., n.
Таким образом, формируют на ракете креновый сигнал в виде электрических импульсов, длительности (ti) которых определяют равные по величине угловые интервалы (ϕi), образуемые при вращении ракеты по углу крена. Преобразуют длительности электрических импульсов (ti) в двоичные числа и вычисляют величину относительного изменения скорости полета ракеты (υ0/υi или υi/υ0, что не принципиально) как отношение двух чисел (соответственно ti/t0 или t0/ti), где t0 равно длительности электрического импульса, принятого за начало отсчета, ti - длительности каждого последующего импульса, начиная с импульса, принятого за начала отсчета, т.е. t0. Величиной отношения этих двух чисел корректируют составляющую командного сигнала по тангажу.
Предлагаемое изобретение поясняется чертежами (фиг.1 и 2).
На фиг.1 представлена структурная электрическая схема системы наведения ракеты, где 1 - аппаратура пункта управления (АПУ), 2 - блок вычисления величины ti/t0 (БВ), 3 - генератор импульсов (ГИ), 4 - первый «RS»-триггер (Т1), 5, 6 и 7 - соответственно, первая, вторая и третья схемы задержки (СЗ1, СЗ2 и СЗ3), 8 - формирователь импульсов (ФИ), 9 - ракета (Р), 10 - первая логическая схема «И» (ЛС1), 11 - таймер (ТА), 12 - вторая логическая схема «И» (ЛС2), 13 - второй «RS»-триггер (Т2), 14 - приемник (П), 15 - счетчик импульсов (СТ), 16 - первый регистр (РГ1), 17 - второй регистр (РГ2), 18 - делитель двух чисел (ДЧ), 19 - третий регистр (РГ3), 20 - блок выделения координат (БВК), 21 - блок коррекции (БК), 22 - автопилот (А), 23 - датчик угла крена (ДУК).
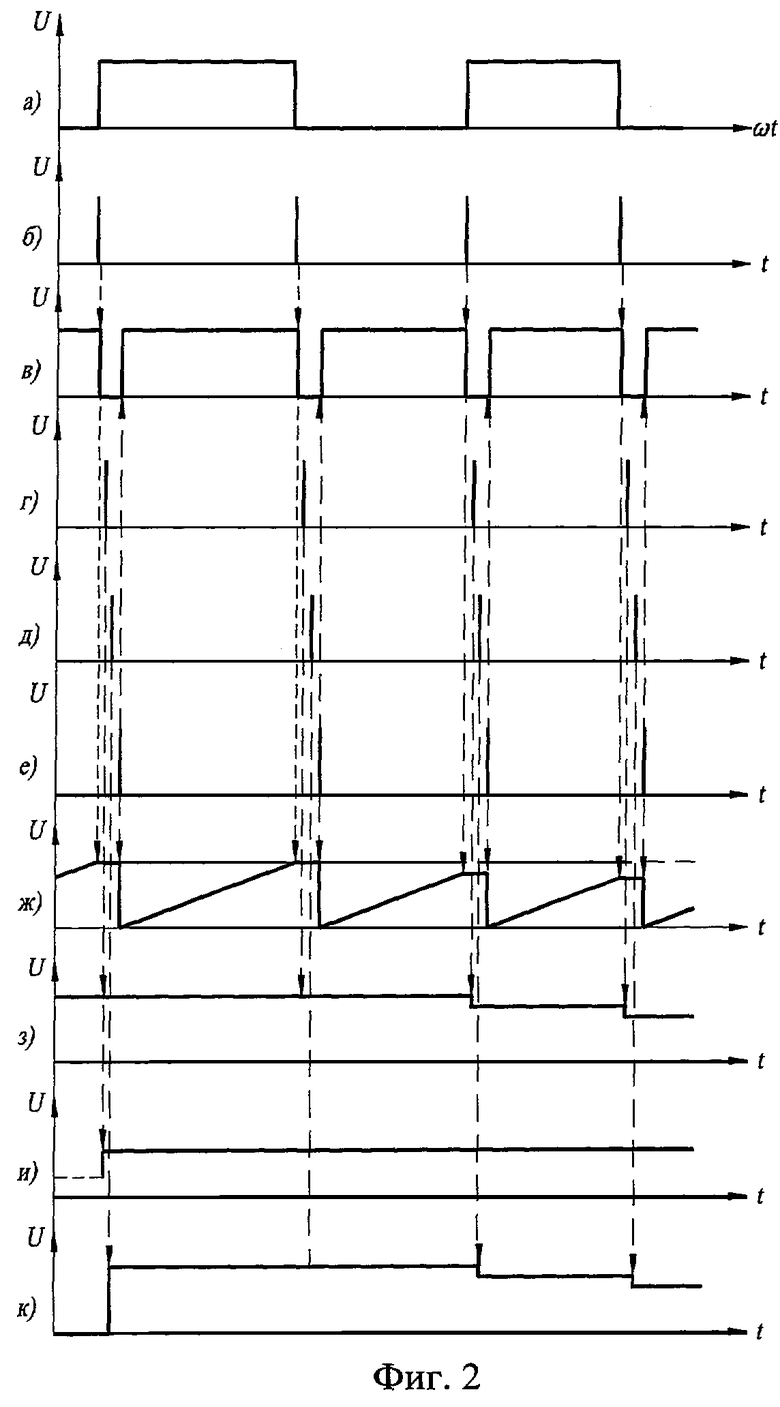
На фиг.2 представлены эпюры сигналов, где а - сигнал на выходе датчика угла крена 23, б - сигнал на выходе формирователя импульсов 8, в - сигнал на выходе первого «RS»-триггера 4, г - сигнал на выходе третьей схемы задержки 7, д - сигнал на выходе второй схемы задержки 6, е - сигнал на выходе первой схемы задержки 5, ж - сигнал на выходе счетчика импульсов 15 (в аналоговом виде), з - сигнал на выходе второго регистра 17 (в аналоговом виде), и - сигнал на выходе первого регистра 16 (в аналоговом виде), к - сигнал на выходе третьего регистра 19 (в аналоговом виде).
На ракете 9 последовательно соединены приемник 14 и блок выделения координат 20, а также последовательно включены датчик угла крена 23, блок вычисления величины ti/t0 2 и блок коррекции 21. Выход блока выделения координат 20 по курсу «Z» соединен с первым входом автопилота 22. Выход блока выделения координат 20 по тангажу «У» подключен ко второму входу блока коррекции 2, выход которого соединен со вторым входом автопилота 22. Третий вход автопилота 22 подключен к выходу датчика угла крена 23.
Аппаратура пункта управления 1 может быть выполнена как в известной системе наведения при сканировании диаграммы направленности, например, поочередно в двух взаимно перпендикулярных направлениях (по курсу и тангажу). Приемник 14 и блок выделения координат 20 могут быть выполнены по схеме приемного тракта, например, с время-импульсной модуляцией (ВИМ) в оптической линии связи или с дополнительной амплитудной модуляцией (ВИМ-АМ) в радиолинии [«Основы радиоуправления». Под ред. Вейцеля В.А. и Типугина В.Н., Москва, «Сов. радио», 1973, стр.246-248, рис.4.28]. Соответственно с данным видом модуляции должна быть выполнена аппаратура пункта управления 1.
Пример выполнения блока вычисления величины ti/t0 приведен на фиг.1. Автопилот 22 выполнен как автопилот для ракеты, вращающейся по углу крена [В.А.Павлов, С.А.Понырко, Ю.М.Хованский. «Стабилизация летательных аппаратов и автопилоты», Москва, Высшая школа, 1964, стр.209, рис.6.11], при этом потенциометр заменяют на преобразователь «угол-число» [В.П.Демидов, Н.Ш.Кутыев. «Управление зенитными ракетами», Москва, Военное издательство, 1989, стр.286, 287, рис.10.4], который входит в состав (оптронного) датчика угла крена 23. Таким образом, датчик угла крена 23 может быть выполнен на гироскопе [«Основы радиоуправления». Под ред. Вейцеля В.А. и Типугина В.Н., Москва «Советское радио», 1973, стр.52, рис.1.29], где вместо потенциометра используется преобразователь «угол-число».
Блок коррекции 21 и делитель чисел 18 могут быть выполнены на программно запоминающем устройстве, например на микросхеме 556РТ7, при этом адреса строк и столбцов этой микросхемы являются, соответственно, первым и вторым входами.
Генератор импульсов 3 - генератор импульсов, стабилизированный по частоте. Первый 4 и второй 13 «RS»-триггеры, первая (двухвходовая) логическая схема «И» 10, вторая (трехвходовая) логическая схема «И» 12, счетчик импульсов 15, первый 16, второй 17 и третий 19 регистры, например микросхемы 564 серии.
Первую 5, вторую 6 и третью 7 схемы задержки можно выполнить, например, как два последовательно включенных ждущих мультивибратора, второй из которых срабатывает по заднему фронту импульса, формируемого первым ждущим мультивибратором. Формирователь импульсов 8 можно выполнить в виде двух параллельно включенных по входу ждущих мультивибраторов, первый из которых срабатывает по переднему фронту входного импульса, а второй по заднему, выходы первого и второго ждущих мультивибраторов подключены, соответственно к первому и второму входам логической схемы «ИЛИ».
Таймер 11 представляет собой, например, счетчик импульсов, счетный вход которого подключен к генератору импульсов (внутренний), стабилизированному по частоте, выход счетчика импульсов соединен с одним из входов «RS»-триггера, второй вход которого и вход установки в нуль счетчика импульсов подключены к выходу устройства, формирующего разовый импульс в момент схода ракеты с пусковой установки, например при выходе бортового источника питания на рабочий режим [Патент России №2220401, МКИ7 F 42 B 15/01].
Заявленная система наведения ракеты работает следующим образом. Аппаратура пункта управления 1, расположенная, например, на земле, формирует поле управления, например, по закону ВИМ, при этом при изменении направления сканирования с вертикального на горизонтальное меняют рабочие сигналы с РС1 на РС2 [«Основы радиоуправления». Под ред. Вейцеля В.А. и Типугина В.Н., Москва, «Сов. радио», 1973, стр.248, рис.4.29]. При вводе ракеты 9 в луч приемник 14 преобразует электромагнитное излучение в электрические импульсы, которые поступают на вход блока выделения координат 20. Этот блок выделяет по курсу «Z» и тангажу «У» координаты ракеты, т.е. электрический сигнал, соответствующий отклонению ракеты 9 от точки прицеливания.
С выходов курса «Z» и тангажа «У» блока выделения координат 20 сигналы в двоичном параллельном коде поступают, соответственно, на первый вход автопилота 22 и через блок коррекции 21 на его второй вход.
Датчик угла крена 23 формирует, например, два импульсных сигнала с периодом повторения, соответствующему периоду вращения ракеты по углу крена, т.е. 360°, при этом длительность единичного и нулевого логических уровней этих сигналов соответствуют 180°, а сдвиг по фазе между этими сигналами - 90°. Из этих двух сигналов формируют, например, с помощью схемы «исключающее ИЛИ» сигнал, приведенный на фиг.2 (эпюра а на фиг.2). Длительности единичного и нулевого логических уровней этого сигнала соответствуют 90°. Данный сигнал привязан соответствующим фронтом первого или второго сигнала на входах логической схемы «исключающее ИЛИ» к исходной фазировке командного сигнала на ракете (данная связь и логическая схема «исключающее ИЛИ» не являются существенными признаками и на фиг.1 не приведены).
Таким образом, в каждую четверть разворота ракеты по углу крена (90°) автопилот 22 осуществляет коммутацию сигналов, например в первую четверть будет «Y'», во вторую «Z», в третью «минус Y'» и в четвертую «минус Z», в соответствии с которыми отклоняются рули ракеты 9.
Предварительно, например в момент выхода бортового источника питания на рабочий режим, формируемым им разовым импульсом устанавливают на выходе таймера 11 нулевой логический уровень, а на выходе второго «RS»-триггера 13 (по входу «S») - единичный логический уровень. Этот единичный логический уровень поступает на вход установки в исходное состояние (например «R») третьего регистра 19 и выставляет на его выходах нулевые логические уровни, которые соответственно выставляют на выходе блока коррекции 21 величину команды «Y'»=«Y».
Сигнал с выхода датчика угла крена 23 (эпюра а на фиг.2) формирователем импульсов 8 преобразуется в импульсы (эпюра б на фиг.2), которые поступают на вход «R» первого «RS»-триггера 4 и устанавливают на его выходе нулевой логический уровень (эпюра в на фиг.2). Этот уровень запрещает прохождение импульсов с выхода генератора импульсов 3 через первую логическую схему «И» 10 на счетный вход (вход «С») счетчика импульсов 15, который переходит из режима счета количества импульсов в режим хранения подсчитанного количества импульсов.
Импульсы с выхода формирователя импульсов 8 поступают также на вход третьей схемы задержки 7. Как отмечалось выше на первом входе второй логической схемы 12 единичный логический уровень, на втором входе - нулевой логический уровень. Поэтому импульсы с выхода третьей схемы задержки 7 (эпюра г на фиг.2) не пройдут на выход третьей логической схемы «И» 12, а импульсы, поступающие на вход записи (вход «С») второго регистра 17, запишут в него величину информации с выхода счетчика импульсов 15 (эпюра з на фиг.2). Однако она далее не пройдет в третий регистр 19, т.к. на его входе «R» запрещающий единичный логический уровень.
В момент срабатывания таймера 11 на втором входе второй логической схемы 12 появится единичный логический уровень, который разрешит пройти первому импульсу с выхода схемы задержки 7 через вторую логическую схему «И» 12. Этот импульс запишет информацию (по входу С) в первый регистр 16 (эпюра и на фиг.2) с выхода счетчика импульсов 15 и выставит по входу «R» на выходе второго «RS»-триггера 13 нулевой логический уровень, который до конца полета ракеты запретит прохождение второго и последующих импульсов с выхода третьей схемы задержки 7 на выход второй логической схемы «И» 12.
Таким образом, информация, записанная в первый регистр 16, не будет больше изменяться (переписываться). Следовательно, информация о величине длительности временного интервала t0 запишется и будет храниться в регистре 16, а информация о величине временного интервала ti будет записываться каждым импульсом с выхода схемы задержки 7 во второй регистр 17 (эпюра з на фиг.2 в аналоговом виде). С выходов обоих регистров информация в двоичном параллельном коде поступает на соответствующие входы делителя чисел 18, который делит одно число на другое, например ti/t0.
Задержанные импульсы с выхода третьей схемы задержки 7 поступают на вход второй схемы задержки 6, на выходе которой формируются импульсы (эпюра д на фиг.2). Эти задержанные импульсы поступают на вход записи (вход «С») третьего регистра 19, и поскольку на его входе «R» нулевой логический уровень, каждый из них записывает в регистр информацию с выхода делителя чисел 18. Информация с выхода третьего регистра 19 (эпюра к на фиг.2 в аналоговом виде) поступает на второй вход блока коррекции 21, где корректируется величина координаты по тангажу «Y», которая затем поступает на второй вход автопилота 22.
Импульсы с выхода второй схемы задержки 6 поступают на вход первой схемы задержки 5, на выходе которой формируются импульсы (эпюра е на фиг.2). Эти задержанные импульсы, т.е. каждый из них поступают на вход «R» счетчика 15 и вход «S» первого «RS»-триггера 4. Счетчик импульсов 15 обнуляется, а на выходе первого «RS»-триггера 4 выставляется единичный логический уровень (эпюра в на фиг.2), который разрешает прохождение импульсов с выхода генератора импульсов 3 через первую логическую схему «И» 10 на счетный вход (вход «С») счетчика импульсов 15. Счетчик импульсов 15 начинает вновь считать количество импульсов (эпюра ж на фиг.2) до момента прихода очередного импульса на вход «R» первого "RS"-триггера 4 (эпюра б на фиг.2). После чего процесс повторяется вновь.
Следовательно, в способе коррекции командного сигнала на ракете, вращающейся по углу крена, за счет того, что на ракете формируют креновый сигнал в виде электрических импульсов, длительности которых определяют равные по величине угловые интервалы, образуемые при вращении ракеты по углу крена, преобразуют длительности электрических импульсов в двоичные числа и вычисляют величину изменения скорости полета ракеты как отношение двух чисел, первое из которых соответствует длительности электрического импульса, принятого за начало отсчета, а второе - длительности каждого последующего импульса начиная с импульса, принятого за начало отсчета, и величиной этого отношения корректируют величину составляющей командного сигнала по тангажу, повышена эффективность коррекции на ракете величины командного сигнала по тангажу за счет использования в качестве регулирующей величины относительное изменение скорости полета ракеты, что уменьшает вероятность падения ракеты при ее полете на малой высоте.
Введение в систему наведения ракеты последовательно включенных датчика угла крена, блока вычисления величины ti/t0 и блока коррекции повысило эффективность коррекции на ракете величины командного сигнала по тангажу, что уменьшило вероятность падения ракеты.
Изобретение относится к области вооружения, а именно к ракетной технике и, в частности, к ракетам, вращающимся по углу крена, и может быть использовано в ракетных комплексах, например в противотанковых с носителями на земле, в которых применяются, например, лучевые системы теленаведения. Технический результат - повышение эффективности коррекции на ракете величины командного сигнала по тангажу за счет использования в качестве регулирующей величины относительное изменение скорости полета ракеты. Предложен способ коррекции командного сигнала на ракете, вращающейся по углу крена, в котором электромагнитное излучение с пункта управления преобразуют в составляющие командного сигнала по курсу и тангажу и из скорректированной составляющей командного сигнала по тангажу и нескорректированной по курсу вырабатывают командный сигнал. При этом на ракете формируют креновый сигнал в виде электрических импульсов, длительности которых определяют равные по величине угловые интервалы, образуемые при вращении ракеты по углу крена, преобразуют длительности электрических импульсов в двоичные числа и вычисляют величину изменения скорости полета как отношение двух чисел, первое из которых соответствует длительности импульса, принятого за начало отсчета, а второе - длительности каждого последующего импульса, начиная с импульса, принятого за начало отсчета, и величиной этого отношения корректируют составляющую командного сигнала по тангажу. Повышена эффективность коррекции на ракете величины командного сигнала, что уменьшает вероятность падения ракеты при полете на малой высоте. 2 н.п. ф-лы, 2 ил.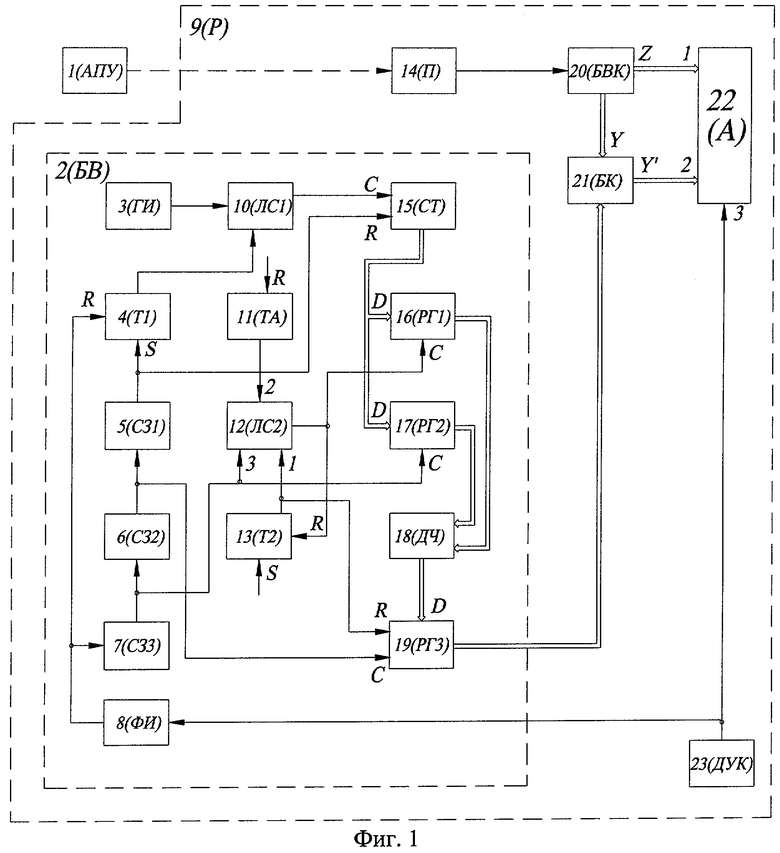
| Основы радиоуправления | |||
| Под редакцией ВЕЙЦЕЛЯ В.А | |||
| и ТИПУГИНА В.Н., М., Советское радио, 1973, с.276, 277 | |||
| СПОСОБ НАВЕДЕНИЯ | 1997 |
|
RU2118784C1 |
| ЦИФРОВОЙ ИЗМЕРИТЕЛЬ МОЩНОСТИ СИГНАЛА И МОЩНОСТИ ПОМЕХИ В ПОЛОСЕ ПРОПУСКАНИЯ КАНАЛА РАДИОПРИЕМНИКА В РЕАЛЬНОМ МАСШТАБЕ ВРЕМЕНИ | 2011 |
|
RU2472167C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ИНТЕРПРЕТАЦИИ ИСПЫТАНИЙ СВАБИРОВАНИЕМ С ИСПОЛЬЗОВАНИЕМ НЕЛИНЕЙНОЙ РЕГРЕССИИ | 2008 |
|
RU2474682C2 |

