Предлагаемая группа изобретений относится к области разработки систем наведения (СН) ракет и может быть использована в комплексах ПТУР и ЗУР.
Одной из задач, решаемых при разработке СН вращающихся по углу крена ракет, является повышение точности их наведения. Для управления ПТУР и ЗУР широко применяется релейный привод рулевого органа (ПРО), на вход которого поступает релейный двухпозиционный сигнал, обеспечивающий перекладку рулевого органа с одного упора на другой.
Известен способ наведения вращающейся ракеты с релейным ПРО (патент RU №2375667, МПК7 F41G 7/00, F42B 15/01, 11.03.08), включающий выработку сигналов управления в вертикальной и горизонтальной плоскостях, модуляцию этих сигналов периодическими по углу крена ракеты релейными трехпозиционными сигналами C(γ), S(γ), сдвинутыми друг относительно друга на угол π/2, формирование сигнала линеаризации, синфазного с периодическими по углу крена сигналами по условию n=2, причем 




СН, реализующая этот способ (патент RU №2375667, МПК7 F41G 7/00, F42B 15/01, 11.03.08), включает формирователи сигналов управления в вертикальной (ФСУВ) и горизонтальной плоскостях (ФСВГ), выходы которых соединены с первыми входами соответственно первого и второго модуляторов, первый суммирующий усилитель (СУ), первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, а третий вход соединен с выходом блока формирования сигнала линеаризации (БФСЛ), датчик угла крена (ДУК), первый выход которого соединен со вторым входом первого модулятора и первым входом БФСЛ, а второй выход соединен со вторым входом второго модулятора и вторым входом БФСЛ, причем сигналы с первого и второго выходов ДУК являются релейными трехпозиционными, сдвинутыми друг относительно друга на угол π/2, двухпозиционный релейный элемент (РЭ), вход которого соединен с выходом первого СУ, привод рулевого органа (ПРО), вход которого соединен с выходом двухпозиционного РЭ.
БФСЛ включает формирователь сигнала линеаризации (ФСЛ), который на основе информации с ДУК реализует на каждом периоде вращения пилообразный сигнал по условию n=2, а также источник временного сигнала (ИВС), третий модулятор и совокупность логических устройств (ЛУ), обеспечивающих при t>t0 инверсию пилообразного сигнала на двух четвертях оборота по крену (его формирование по условию n=4).
Согласно данному способу и реализующему его устройству формируется релейный двухпозиционный сигнал V, поступающий на ПРО, обеспечивающий управление ракетой на основе широтно-импульсной модуляции (ШИМ).
Комплексная амплитуда 
где 


В соответствии с разложением в ряд проекции 

где ky, Z - нормированные по амплитуде сигнала линеаризации Ал сигналы управления в вертикальной и горизонтальной плоскостях:
Результирующие команды в обеих плоскостях формируются независимо друг от друга каждая в своей плоскости, а диапазон их изменения составляет: от минус 
Недостатком данного способа является невозможность обеспечения максимальных команд вверх, необходимых для ракет с дефицитом располагаемой перегрузки. Кроме того, зависимость результирующих команд управления от отклонений носит нелинейный характер, связанный с реализацией сигналов линеаризации пилообразного вида.
Наиболее близким к предлагаемому является способ наведения вращающейся ракеты с релейным ПРО (патент RU №2310151, МПК7 F41G 7/00, F42B 15/01, 20.12.05), включающий выработку сигналов управления в вертикальной и горизонтальной плоскостях, модуляцию этих сигналов периодическими по углу крена ракеты сигналами, формирование сигнала линеаризации, синфазного с периодическими по углу крена сигналами, до момента включения маршевого двигателя ракеты и после его выключения по условию n=3, а во время работы маршевого двигателя по условию n=2, причем 

СН, реализующая этот способ (патент RU №2310151, МПК7 F41G 7/00, F42B 15/01, 20.12.05), включает ФСУВ и ФСУГ, выходы которых соединены, соответственно, с первыми входами первого модулятора и второго модулятора, СУ, первый и второй входы которого соединены соответственно с выходами первого и второго модуляторов, а третий вход соединен с выходом БФСЛ, ДУК, первый выход которого соединен со вторым входом первого модулятора, а второй выход соединен со вторым входом второго модулятора и входом БФСЛ, причем сигналы с первого и второго выходов ДУК являются релейными трехпозиционными, сдвинутыми друг относительно друга на угол π/2, двухпозиционный РЭ, вход которого соединен с выходом СУ, а также ПРО, вход которого соединен с выходом двухпозиционного РЭ.
БФСЛ включает ФСЛ, вход которого соединен со вторым выходом ДУК, первое ЛУ, вход которого соединен со вторым выходом ДУК, второе ЛУ, первый вход которого соединен со вторым выходом ДУК, а второй вход соединен с выходом ИВС, третий модулятор, первый вход которого соединен с выходом ФСЛ, второй вход соединен с выходом первого ЛУ, третий вход соединен с выходом второго ЛУ, а выход соединен с третьим входом СУ.
СН работает следующим образом.
Сигналы линейных рассогласований hy, hz с выходов ФСУВ и ФСУГ перемножаются на модуляторах M1 и M2 с сигналами C(γ), S(γ) с выходов ДУК, являющимися релейными трехпозиционными, сдвинутыми друг относительно друга на угол π/2. В БФСЛ на основе информации с ДУК на каждом периоде вращения ракеты по углу крена ФСЛ реализует пилообразный сигнал Uл вида (по условию n=4)
который корректируется сигналами с логических устройств ЛУ1 и ЛУ2. В результате скорректированный сигнал линеаризации Uл1 на выходе БФСЛ при t<t1 и t>t2 формируется по условию n=3
а при t1≤t≤t2 по условию n=2:
После суммирования промодулированных рассогласований со скорректированным сигналом линеаризации на СУ и определения знака суммы двухпозиционным РЭ результирующий выходной сигнал
V=sign(hyC(γ)+hzS(γ)+Uл1),
поступающий на одноканальный релейный ПРО ракеты, в течение времени t<t1 и t>t2 формируется на утроенной частоте вращения ракеты по крену, а в течение времени t1≤t≤t2 - на удвоенной.
ПРО осуществляет отработку этого сигнала, т.е. перекладку рулей в соответствии с изменением его знака. Вращающаяся по углу крена ракета демодулирует отклонение рулей δ, в результате чего в каждой из плоскостей создается управляющий момент, соответствующий исходным линейным рассогласованиям hy, hz.
В соответствии с разложением в гармонический ряд результирующие команды на ПРО в вертикальной и горизонтальной плоскостях 

Диапазон изменения результирующей команды на ПРО составляет:
в вертикальной плоскости 
от 

от минус 0,9 до 0,9 (при максимальной команде в горизонтали);
в горизонтальной плоскости 
от минус 0,9 до 0,9.
Известный способ и реализующая его СН позволяют обеспечить максимальные команды вверх на начальном и конечном участках наведения (при горизонтальных командах, близких к нулевым) за счет формирования дополнительной команды вверх 
Недостатком известных способа и СН является возможное расширение рассеивания траекторий на начальном участке в вертикальной плоскости, связанное с зависимостью реализуемой вертикальной команды от величины команды в горизонтальной плоскости, обусловленной, в свою очередь, величиной действующих возмущений схода ракеты (по углу рыскания и его производной) и бокового ветра (например, для ракет с низкой начальной скоростью, чувствительных к воздействию боковых возмущений и ветра).
Кроме того, зависимость результирующей команды управления от отклонений носит нелинейный характер, связанный с реализацией сигналов линеаризации пилообразного вида.
Задачей предлагаемой группы изобретений является обеспечение в течение всего полета высокой точности наведения одноканальной вращающейся ракеты с релейным двухпозиционным ПРО.
Для решения поставленной задачи необходимо обеспечить:
минимальное рассеивание траекторий ракет на начальном участке;
линейную зависимость результирующей команды управления от отклонений;
выбор рационального способа формирования команд управления в течение всего полета ракеты.
Поставленная задача решается за счет того, что по сравнению с известным способом наведения вращающейся ракеты с релейным ПРО, включающим выработку сигналов управления в вертикальной hy и горизонтальной hz плоскостях, модуляцию сигналов управления периодическими по углу γ крена ракеты релейными трехпозиционными сигналами C(γ), S(γ), сдвинутыми друг относительно друга на угол π/2, и преобразование релейного двухпозиционного сигнала управления в отклонение рулевого органа, задают до пуска момент времени tз, релейный двухпозиционный сигнал V формируют по закону

где U1, U2 - периодические по углу γ сигналы, сдвинутые на угол π/2 друг относительно друга и на угол π/2 соответственно относительно сигналов C(γ), S(γ), а момент времени t0 определяют как ближайший момент времени после заданного до пуска момента времени tз, соответствующий переключению сигнала S(γ) с нулевого уровня на положительный уровень.
В СН, реализующей предлагаемый способ наведения, в отличие от известной СН вращающейся ракеты с релейным ПРО, включающей формирователи сигналов управления в вертикальной и горизонтальной плоскостях, первый и второй модуляторы, выходы которых соединены соответственно с первым и вторым входами суммирующего усилителя, датчик угла крена, сигналы с первого и второго выходов которого являются периодическими по углу крена, сдвинутыми друг относительно друга на угол π/2, источник временного сигнала и ПРО, новым является то, что в нее введены второй и третий суммирующие усилители, первые входы которых соединены соответственно с выходами формирователей сигналов рассогласования в вертикальной и горизонтальной плоскостях, первый и второй релейные элементы, входы которых соединены соответственно с выходами второго и третьего суммирующих усилителей, а выходы соединены соответственно с первыми входами первого и второго модуляторов, фазовращатель, первый и второй входы которого соединены соответственно с первым и вторым выходами датчика угла крена, блок переключения, первый и второй входы которого соединены соответственно с первым и вторым выходами фазовращателя, третий вход соединен с выходом источника временного сигнала, а первый и второй выходы соединены со вторыми входами соответственно второго и третьего суммирующих усилителей, третий и четвертый релейные элементы, входы которых соединены соответственно с первым и вторым выходами датчика угла крена, инвертирующий усилитель, вход которого соединен с выходом четвертого релейного элемента, четвертый и пятый суммирующие усилители, первые входы которых соединены соответственно с выходами третьего и четвертого релейных элементов, вторые входы соединены соответственно с выходом инвертирующего усилителя и выходом третьего релейного элемента, а выходы соединены соответственно со вторыми входами первого и второго модуляторов, причем четвертый вход блока переключения соединен с выходом четвертого релейного элемента, а вход ПРО соединен с выходом первого суммирующего усилителя.
Графические материалы представлены на фиг.1-6.
Структура предлагаемой СН приведена на фиг.1, где 1 - ФСУВ, 2 - ФСУГ, 3 - второй СУ (СУ2), 4 - третий СУ (СУЗ), 5 - первый релейный элемент (РЭ1), 6 - второй релейный элемент (РЭ2), 7 - первый модулятор (M1), 8 - второй модулятор (М2), 9 - ДУК, 10 - фазовращатель (ФВ), 11 - блок переключения (БП), 12 - ИВС, 13 - третий релейный элемент (РЭЗ), 14 - четвертый релейный элемент (РЭ4), 15 - инвертирующий усилитель (ИУ), 16 - четвертый СУ (СУ4), 17 - пятый СУ (СУ5), 18 - первый СУ (СУ1), 19 - релейный ПРО.
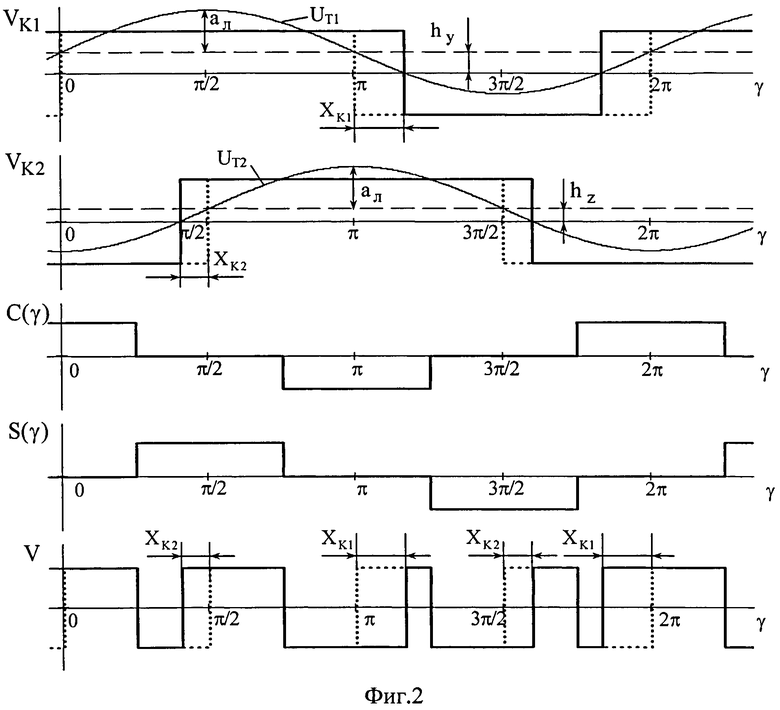
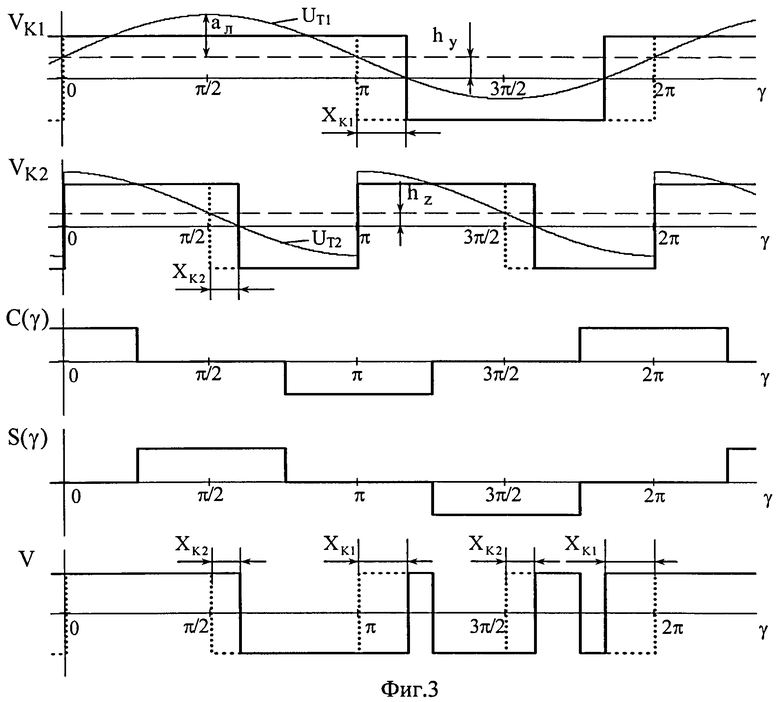
Вид сигналов с выходов элементов предлагаемой СН, поясняющих ее работу при t≤t0, представлен на фиг.2, а при t>t0 - на фиг.3.
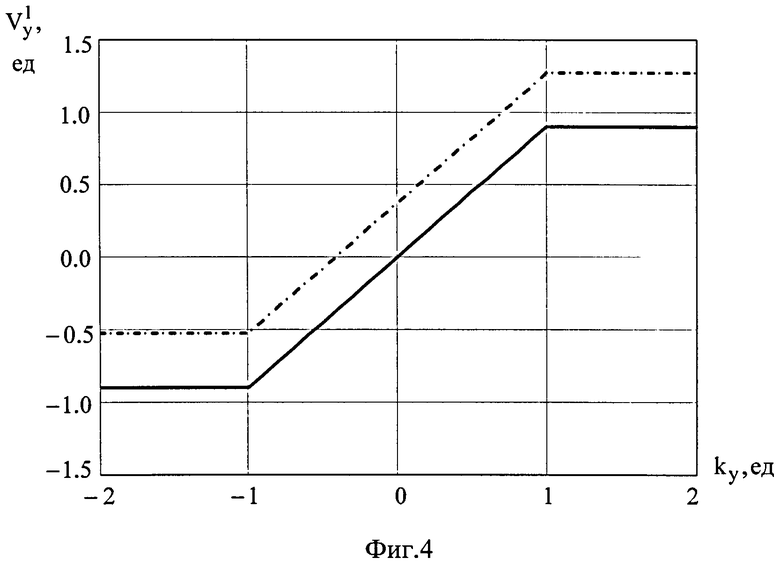
На фиг.4 представлена зависимость результирующей команды в вертикальной плоскости от сигнала управления в вертикальной плоскости (при нулевом сигнале управления в горизонтальной плоскости) при t≤t0 (сплошная линия) и при t>t0 (штрихпунктирная линия),
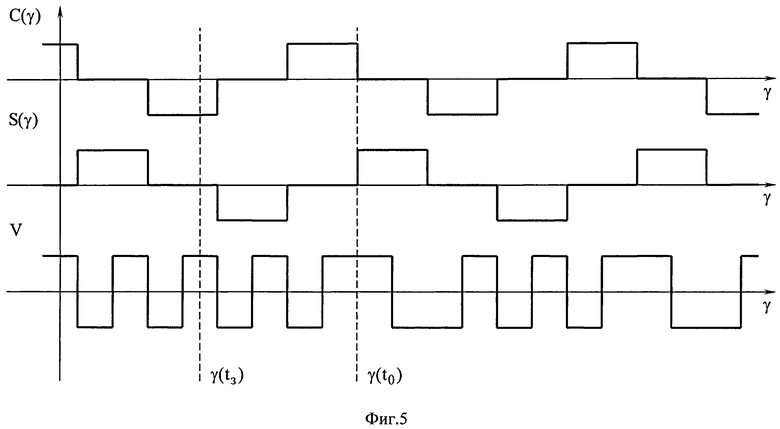
На фиг.5 показано формирование выходного релейного сигнала при нулевых сигналах управления в обеих плоскостях в районе момента времени t0.
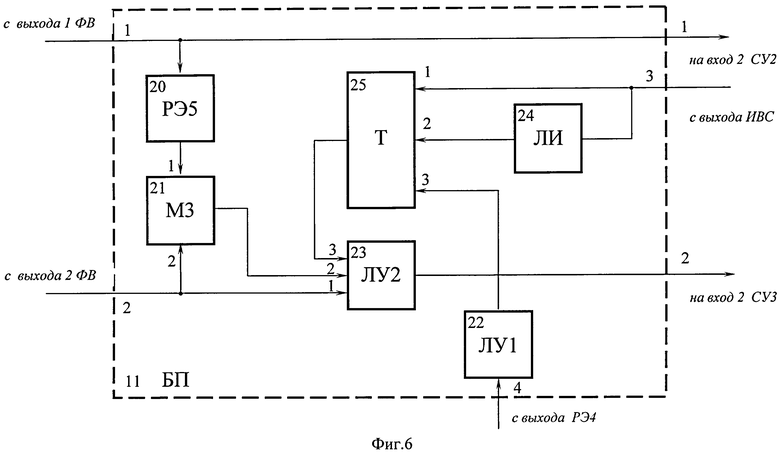
На фиг.6 приведена схема возможной реализации БП 11, где 20 - пятый релейный элемент (РЭ5), 21 - третий модулятор (M3), 22 - первое ЛУ (ЛУ1), 23 - второе ЛУ (ЛУ2) 24 - логический инвертор ЛИ, 25 - RS-триггер (Т), синхронизируемый фронтом.
Предлагаемая СН работает следующим образом (фиг.1).
Сигналы с первого и второго выходов ДУК 9, сдвинутые друг относительно друга на угол π/2, которые, в общем случае, могут быть любыми периодическими по углу крена, преобразуются на ФВ 10 в сигналы U1 и U2 путем изменения их фазы в сторону запаздывания на угол π/4 (что необходимо для фазового согласования сигналов). Например, при гармонических по углу крена сигналах с выходов ДУК сигналы с выходов ФВ 10 имеют вид U1=алcosγ и U2=алsinγ, где 
В БП, на входы которого кроме этих сигналов поступают сигнал с ИБС 12 и сигнал с выхода РЭ4 14, они преобразуются согласно алгоритму


Более подробно работа БП описана ниже.
Сигналы линейных рассогласований hy, hz (линии длинными штрихами на фиг.2, 3) с выходов ФСУВ 1 и ФСУГ 2 суммируются соответственно на СУ2 3 и СУ3 4 с периодическими по углу крена сигналами 



Все релейные элементы схемы (РЭ1 5, РЭ2 6, РЭ3 13, РЭ4 14) преобразуют линейные сигналы, поступающие на их входы, к релейному двухпозиционному виду. Уровни релейных сигналов на выходе РЭ1 5, РЭ2 6 устанавливаются равными ±1, а на выходе РЭ3 13, РЭ4 14 устанавливаются равными ±0,5.
Релейные сигналы с выходов РЭ3 13 и РЭ4 14 с помощью ИУ 15 и перекрестного суммирования на СУ4 16 и СУ5 17 с коэффициентами, равными 1 по всем входам, преобразуются в трехпозиционные релейные сигналы, аналогичные сигналам C(γ), S(γ) прототипа (см. фиг.2, 3).
Релейные сигналы VK1, VK2 с выходов РЭ1 5 и РЭ2 6 перемножаются на модуляторах M1 7 и М2 8 с сигналами C(γ), S(γ) с выходов СУ4 16 и СУ5 17.
После суммирования промодулированных рассогласований в вертикальной и горизонтальной плоскостях на СУ1 18 результирующий релейный двухпозиционный сигнал управления V поступает на одноканальный релейный ПРО 19, который осуществляет отработку этого сигнала. Отклонения рулей создают управляющий момент, соответствующий исходным линейным рассогласованиям hy, hz.
БП 11 осуществляет коррекцию сигналов U1 и U2. При задании в ИВС 12 до пуска момента времени tз, большего полетного времени tп ракеты до цели, результирующий сигнал управления V, поступающий на ПРО 19, формируется на учетверенной частоте вращения ракеты по крену, при задании момента времени tз=0 - на утроенной частоте, а при 0<tз<tп - последовательно чередуются по времени полета учетверенная и утроенная частоты.
Процесс формирования релейного сигнала управления V из сигналов линейных рассогласований и периодических сигналов крена подробно представлен на фиг.2, 3 для случая нулевых (линия короткими штрихами) и ненулевых (сплошная линия) отклонений в вертикальной и горизонтальной плоскости, определяющих величину смещений фронтов релейных сигналов VK1, VK2 и V в угловой мере, что реализует широтно-импульсную модуляцию сигналов управления.
При гармонических по углу крена сигналах U1, U2 результирующие команды на ПРО в вертикальной и горизонтальной плоскостях 
при t≤t0: 
при t>t0: 
Как видно из приведенных формул и фиг.4, зависимость результирующих команд от отклонений носит, в отличие от известных способов (зависимости (1), (2)), линейный характер.
С другой стороны, предлагаемая группа изобретений сохраняет положительное свойство ближайшего аналога - обеспечение максимально возможных команд вверх после момента времени tз.
Оптимальное значение момента времени tз, задаваемое до пуска, при реализации предлагаемого способа (фиг.5) определяется априорно конкретно для каждого типа ракет и реализуется в ИБС. Одним из определяющих факторов может служить величина располагаемой перегрузки ракеты, которая существенно переменна в процессе полета ракеты (например, на участке работы двигателя и участке излета после его выключения). Переключение частоты формирования сигнала с учетверенной на утроенную частоту вращения может производиться, например, по окончании переходного процесса после выстрела ракеты или непосредственно на конечном участке полета в условиях дефицита располагаемой перегрузки.
Формирование сигнала на начальном участке полета на утроенной частоте вращения нежелательно для ракет с низкой начальной скоростью вследствие увеличения рассеивания траекторий.
Так, при команде в горизонтальной плоскости, близкой к нулевой, имеется определенная трубка рассеивания в вертикальной плоскости от вертикальных возмущений схода ракеты (по углу тангажа и его производной). Рассеивание представляет собой разброс отклонений в точке экстремума от минимального значения Ymin до максимального значения Ymax.
При максимальных командах в горизонтальной плоскости трубка рассеивания смещается вниз на величину ΔY, вследствие отсутствия добавочной команды и, соответственно, общее рассеивание в вертикальной плоскости увеличивается на величину ΔY (от минимального значения Ymin-ΔY до максимального значения Ymax).
В качестве ФВ может быть использована схема, представленная в книге А.А.Казамаров, A.M.Палатник, Л.О.Роднянский. - Динамика двумерных систем автоматического регулирования, М.: «Наука», 1967, с.153, рис.2.6.6, представляющая собой двумерное устройство с антисимметричной перекрестной связью между каналами. Реализация требуемого угла разворота фазы π/4 обеспечивается при коэффициентах, все значения которых составляют 
В качестве примера реализации БП 11 может быть использована схема, представленная на фиг.6. На МЗ 21 с помощью РЭ5 20 образуется сигнал вида U2sign(-U1). На первый S-вход RS-триггера T25 поступает сигнал с ИВС 12, определяющий момент времени tз, а на его второй R-вход поступает логически инвертированный на ЛИ 24 сигнал (для сброса T в исходное состояние). На третий С-вход T 25 поступает сигнал синхронизации с ЛУ1 22, работающего согласно алгоритму
где UРЭ4 - сигнал с выхода РЭ4 14, передние фронты которого соответствуют переключениям сигнала S(γ) с нулевого уровня на положительный уровень.
Момент переключения по указанному фронту соответствует началу четверти периода вращения по углу крена, в которой происходит инвертирование выходного сигнала (фиг.5), обеспечивающее увеличение команды вверх.
Минимизация отклонений в вертикальной плоскости после переключения может быть обеспечена изменением программно-временного сигнала в вертикальном канале, компенсирующего динамическую ошибку от действия ускорения силы тяжести, как, например, в патенте RU №2131576, МПК6 F41G 7/00, 25.03.98.
В результате T25 выдает сигнал UT на переключение в момент времени t0, а на ЛУ2 23 формируется сигнал вида

Сигнал U1 в БП не преобразуется. Таким образом, выходные сигналы БП соответствуют зависимости (3).
В качестве остальных элементов СН могут быть использованы устройства, представленные в ближайшем аналоге и в патенте RU №2375667, МПК7 F41G 7/00, F42B 15/01, 11.03.08.
Применение предлагаемого способа и СН позволяет обеспечить высокую точность наведения вращающихся по углу крена одноканальных ракет с релейными ПРО в течение всего полетного времени.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТОЙ | 2006 |
|
RU2321814C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486428C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ | 2000 |
|
RU2184921C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375667C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310151C2 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА (ВАРИАНТЫ) | 2006 |
|
RU2326323C2 |
| СПОСОБ ВВОДА В ЗОНУ УПРАВЛЕНИЯ РАКЕТЫ, ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА, И РАКЕТНЫЙ КОМПЛЕКС | 2007 |
|
RU2362107C2 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2527391C2 |
| СПОСОБ ФОРМИРОВАНИЯ КОМАНДЫ УПРАВЛЕНИЯ ОДНОКАНАЛЬНОЙ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2011 |
|
RU2473864C1 |
| СПОСОБ МОДУЛЯЦИИ РЕЛЕЙНЫХ СИГНАЛОВ УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ ПО УГЛУ КРЕНА РАКЕТОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2315938C1 |
Изобретение относится к области приборостроения и может быть использовано в комплексах противотанковых управляемых ракет (ПТУР) и зенитных управляемых ракет (ЗУР). Технический результат - повышение точности наведения ракет с релейными приводами рулевых органов (ПРО). Для этого задают до пуска момент времени tз, а релейный двухпозиционный сигнал V формируют по закону
где U1, U2 - периодические по углу γ сигналы, сдвинутые на угол π/2 друг относительно друга и на угол π/2 соответственно относительно сигналов C(γ), S(γ), а момент времени t0 определяют как ближайший момент времени после заданного до пуска момента времени tз, соответствующий переключению сигнала S(γ) с нулевого уровня на положительный уровень. При этом в систему с релейным ПРО введены соответствующие дополнительные суммирующие усилители, релейные элементы, модуляторы, фазовращатель и инвертирующий усилитель. 2 н.п. ф-лы, 6 ил.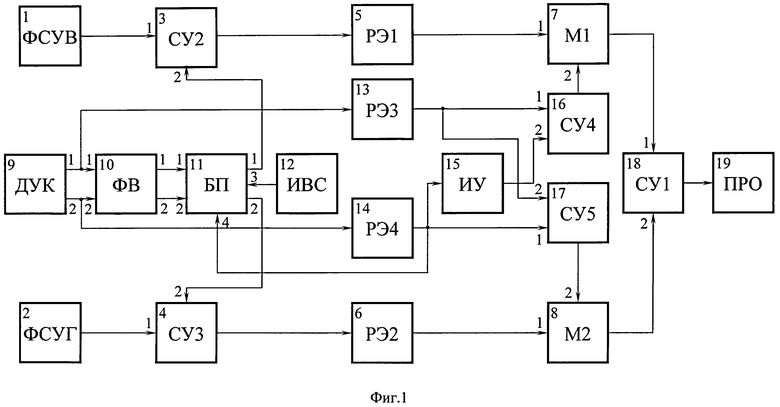
1. Способ наведения вращающейся ракеты с релейным приводом рулевого органа, включающий выработку сигналов управления в вертикальной hy и горизонтальной hz плоскостях, модуляцию сигналов управления периодическими по углу γ крена ракеты релейными трехпозиционными сигналами C(γ), S(γ), сдвинутыми друг относительно друга на угол π/2, и преобразование релейного двухпозиционного сигнала управления в отклонение рулевого органа, отличающийся тем, что задают до пуска момент времени tз, релейный двухпозиционный сигнал V формируют по закону

где U1, U2 - периодические по углу γ сигналы, сдвинутые на угол π/2 друг относительно друга и на угол π/2 соответственно относительно сигналов C(γ), S(γ),
а момент времени t0 определяют как ближайший момент времени после заданного до пуска момента времени tз, соответствующий переключению сигнала S(γ) с нулевого уровня на положительный уровень.
2. Система наведения вращающейся ракеты с релейным приводом рулевого органа, включающая формирователи сигналов управления в вертикальной и горизонтальной плоскостях, первый и второй модуляторы, выходы которых соединены соответственно с первым и вторым входами суммирующего усилителя, датчик угла крена, сигналы с первого и второго выходов которого являются периодическими по углу крена, сдвинутыми друг относительно друга на угол π/2, источник временного сигнала и привод рулевого органа, отличающаяся тем, что в нее введены второй и третий суммирующие усилители, первые входы которых соединены соответственно с выходами формирователей сигналов рассогласования в вертикальной и горизонтальной плоскостях, первый и второй релейные элементы, входы которых соединены соответственно с выходами второго и третьего суммирующих усилителей, а выходы соединены соответственно с первыми входами первого и второго модуляторов, фазовращатель, первый и второй входы которого соединены соответственно с первым и вторым выходами датчика угла крена, блок переключения, первый и второй входы которого соединены соответственно с первым и вторым выходами фазовращателя, третий вход соединен с выходом источника временного сигнала, а первый и второй выходы соединены с вторыми входами соответственно второго и третьего суммирующих усилителей, третий и четвертый релейные элементы, входы которых соединены соответственно с первым и вторым выходами датчика угла крена, инвертирующий усилитель, вход которого соединен с выходом четвертого релейного элемента, четвертый и пятый суммирующие усилители, первые входы которых соединены соответственно с выходами третьего и четвертого релейных элементов, вторые входы соединены соответственно с выходом инвертирующего усилителя и выходом третьего релейного элемента, а выходы соединены соответственно с вторыми входами первого и второго модуляторов, причем четвертый вход блока переключения соединен с выходом четвертого релейного элемента, а вход привода рулевого органа соединен с выходом первого суммирующего усилителя.
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2375667C1 |
| СПОСОБ НАВЕДЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТЫ С РЕЛЕЙНЫМ ПРИВОДОМ РУЛЕВОГО ОРГАНА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2310151C2 |
| ПУПКОВ К.А., ЧАН Н | |||
| К | |||
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| -С | |||
| Способ сопряжения брусьев в срубах | 1921 |
|
SU33A1 |
| СПОСОБ НАВЕДЕНИЯ ТЕЛЕУПРАВЛЯЕМОЙ РАКЕТЫ С РАСКРЫВАЕМЫМИ ПОСЛЕ ПУСКА РУЛЯМИ | 2005 |
|
RU2297588C1 |
| Релейно-импульсный регулятор | 1983 |
|
SU1674058A1 |
| КАМПЕ-НЕММ А.А | |||
| Автоматическое двухпозиционное регулирование | |||
| - М.: Наука, 1967, с.27 - 28 | |||

