Изобретение относится к микробиологической промышленности, а именно к способам автоматического управления процессом выращивания микроорганизмов, и может быть использовано при производстве дрожжей, в частности, хлебопекарных.
Известны способы автоматического управления процессом выращивания микроорганизмов, предусматривающие регулирование подачи воздуха на аэрацию и изменение температуры дрожжевой суспензии (а. с. N 488847, кл. C 12 B 1/08, 1975, бюл. N 39 и а.с. N 352562, кл. C 12 B 1/08, 1973, бюл. N 42).
Такие способы не обеспечивают оптимальных условий ведения процесса выращивания дрожжей, так как
не учитываются значительные колебания редуцирующих веществ (РВ) в питательном растворе;
не позволяют уловить момент затухания аэробного процесса, когда начавшееся анаэробное спиртовое брожение подавляет дыхание дрожжей и препятствует нормальному развитию и размножению дрожжевых клеток из-за недостатка кислорода;
не учитываются значительные инерционность и запаздывание контура регулирования температурным режимом.
Наиболее близким к предлагаемому способу является способ автоматического управления процессом выращивания дрожжей (а.с. N 584033, кл. C 12 B 1/08, 1977, бюл. N 46), предусматривающий определение скорости изменения температуры дрожжевой суспензии, сравнение ее с заданной отрицательной величиной и, в зависимости от результата сравнения, коррекцию подачи воздуха на аэрацию.
Рассматриваемый способ имеет следующие недостатки:
управление ведется по косвенному параметру - скорости изменения температуры дрожжевой суспензии, без учета основного параметра, определяющего процесс выращивания дрожжей - скорости изменения концентрации дрожжей;
Коррекция подачи воздуха на аэрацию осуществляется в том момент, когда величина изменения скорости температуры дрожжевой суспензии по своему абсолютному значению превысит определенную, наперед заданную, отрицательную величину, что соответствует началу нежелательного спиртового брожения, и, следовательно, такой режим далек от оптимального;
рассматриваемый способ может быть использован при реализации "жесткой" технологической программы, т.е. требует предварительного определения отрицательной величины, и, следовательно не находит применения при ведении "гибкого" технологического процесса, учитывающего, например, возмущающие воздействия по качеству питательных сред, поступающих в дрожжерастительный аппарат.
Задачей изобретения является обеспечение оптимальных условий ведения процесса выращивания дрожжей и увеличение их выхода.
Поставленная задача достигается тем, что по предлагаемому способу определяется скорость изменения концентрации дрожжевой суспензии, сравнивается со скоростью изменения концентрации кислорода в отработанных газах и со скоростью изменения температуры дрожжевой суспензии и, в зависимости от результатов сравнения, корректируется подача воздуха на аэрацию.
В результате проведенного поиска установлено, что в существующих технических решениях автоматического управления процессом выращивания микроорганизмов не использовались вообще такие параметры, как скорость изменения концентрации дрожжевой суспензии и скорость изменения концентрации кислорода в отработанных газах, тем более в совокупности с ранее используемым параметром - скоростью изменения температуры дрожжевой суспензии. Использование этих параметров в предложенной совокупности дает новый положительный эффект. Поэтому предлагаемое техническое решение отвечает критерию "существенные отличия".
На чертеже представлена структурная схема системы, реализующей предлагаемый способ.
Система состоит из объекта управления - дрожжерастительного аппарата 1; датчика расхода воздуха 2, поступающего на аэрацию в аппарат 1; датчика концентрации дрожжевой суспензии 3 в аппарате 1; датчика концентрации кислорода 4 в отработанных газах; датчика температуры 5 в дрожжевой суспензии в аппарате 1; дифференцирующих элементов 6-8; задатчиков 9-11; элементов сравнения 12-14; управляющего устройства 15 и исполнительного механизма с регулирующим органом 16, установленным на линии подачи воздуха на аэрацию в аппарат 1.
Система работает следующим образом.
Информация о текущем значении расхода воздуха на аэрацию в аппарат 1 поступает на управляющее устройство 15, где сравнивается с заданным значением расхода воздуха для данной расы микроорганизмов, поступающим на управляющее устройство 15 от задатчика 11. Управляющее устройство 15 при наличии разности между текущим и заданным значениями расхода воздуха на аэрацию в соответствии с выбранным алгоритмом управления вырабатывает соответствующий управляющий сигнал, поступающий на исполнительный механизм с регулирующим органом 16, который изменяет расход воздуха на аэрацию в аппарате 1.
Рассмотренная система обеспечивает стабилизацию воздуха на аэрацию при отсутствии возмущающих воздействий на объект управления. Однако в реальном процессе присутствуют значительные возмущающие воздействия, и возникает необходимость корректировать расход воздуха на аэрацию для компенсации возмущающих воздействий. Предлагаемый способ автоматического управления учитывает это.
Для этого непрерывно измеряются текущие значения концентрации дрожжевой суспензии X в аппарате 1, концентрации кислорода в отработанных газах Y и температуры дрожжевой суспензии Z в аппарате 1 с помощью датчиков, соответственно 3-5. Сигналы с датчиков 3-5, пропорциональные текущим значениям концентрации дрожжевой суспензии X, концентрации кислорода в отработанных газах Y и температуры дрожжевой суспензии Z, поступают в дифференциальные элементы 6-8, в которых определяются скорости их изменения и вырабатываются сигналы, пропорциональные этим скоростям, т.е. 
С дифференцирующих элементов 6 и 7 сигналы поступают на элемент сравнения 12, где происходит их сравнение и определение разности их значений, т. е.  Полученная разность на этом же элементе сравнения 12 сравнивается с заданной, предельно допустимой по технологическому регламенту для соответствующих микроорганизмов, величиной ε1, поступающей на элемент сравнения 12 от задатчика 9. Если величина
Полученная разность на этом же элементе сравнения 12 сравнивается с заданной, предельно допустимой по технологическому регламенту для соответствующих микроорганизмов, величиной ε1, поступающей на элемент сравнения 12 от задатчика 9. Если величина  то на выходе элемента сравнения 12 будет 0 (ноль). Если же величина разности
то на выходе элемента сравнения 12 будет 0 (ноль). Если же величина разности  то элемент сравнения 12 определит их разность, т.е.
то элемент сравнения 12 определит их разность, т.е.  и эта величина, с соответствующим знаком, поступает на элемент сравнения 14, куда одновременно поступает сигнал с элемента сравнения 13.
и эта величина, с соответствующим знаком, поступает на элемент сравнения 14, куда одновременно поступает сигнал с элемента сравнения 13.
Одновременно с этим, с дифференцирующим элементом 6 и 8 сигналы поступают и на элемент сравнения 13, где эти сигналы сравниваются, и определяется разность их значений, т. е.  Полученная разность в этом же элементе сравнения 13 сравнивается с заданной, предельно допустимой величиной ε2 , поступившей на элемент сравнения 13 от задатчика 10. Если величина
Полученная разность в этом же элементе сравнения 13 сравнивается с заданной, предельно допустимой величиной ε2 , поступившей на элемент сравнения 13 от задатчика 10. Если величина  , то на выходе элемента сравнения 13 будет 0 (ноль). Если же величина разности
, то на выходе элемента сравнения 13 будет 0 (ноль). Если же величина разности  то элемент сравнения 13 определит их разность, т. е.
то элемент сравнения 13 определит их разность, т. е.  и эта величина, с соответствующим знаком, поступит на элемент сравнения 14.
и эта величина, с соответствующим знаком, поступит на элемент сравнения 14.
На элементе сравнения 14 сравниваются две величины Δ1 и Δ2 с учетом их знаков. Если знаки Δ1 и Δ2 одинаковые (оба положительные или оба отрицательные), то элемент сравнения 14 пропустит больший из них на управляющее устройство 15 как корректирующий сигнал. Если же знаки Δ1 и Δ2 разные, то элемент сравнения 14 определяет их алгебраическую сумму, и этот суммарный сигнал поступает на управляющее устройство 15 как корректирующий сигнал. Если же Δ1 = Δ2, и их знаки одинаковые, то на управляющее устройство 15 подается 0 (ноль), т.е. корректирующий сигнал отсутствует.
Управляющее устройство 15, в соответствии с величиной и знаком сигнала с элемента сравнения 14, корректирует управляющее воздействие на исполнительный механизм 16, который изменит расход воздуха на аэрацию в аппарат 1.
Рассмотрим более подробно работу элементов сравнения 12-14.
Пусть, например, величина скорости изменения концентрации биомассы  больше величины скорости изменения концентрации кислорода
больше величины скорости изменения концентрации кислорода  в отработанных газах, т.е.
в отработанных газах, т.е.  (такая ситуация может произойти, если общее состояние процесса культивирования микроорганизмов, с учетом физиологических возможностей популяции, превосходит количество кислорода, поступающего в аппарат, например, из-за временной неисправности части воздухораспределительного устройства и др.). Следовательно, в элементе сравнения 12 определяется разность
(такая ситуация может произойти, если общее состояние процесса культивирования микроорганизмов, с учетом физиологических возможностей популяции, превосходит количество кислорода, поступающего в аппарат, например, из-за временной неисправности части воздухораспределительного устройства и др.). Следовательно, в элементе сравнения 12 определяется разность  и сравнивается, по абсолютной величине, с заданной величиной ε1. Тогда, при условии |ε
и сравнивается, по абсолютной величине, с заданной величиной ε1. Тогда, при условии |ε
Одновременно, пусть, например, величина скорости изменения температуры дрожжевой суспензии  больше величины скорости изменения концентрации дрожжевой суспензии
больше величины скорости изменения концентрации дрожжевой суспензии  т.е.
т.е.  (это может произойти, если имеют место возмущения по температурному каналу, например, засорение или другие временные неисправности при подаче охлаждающей жидкости в аппарат, изменение температуры воздуха, поступающего на аэрацию и др.). Тогда в элементе сравнения 13 определится разность
(это может произойти, если имеют место возмущения по температурному каналу, например, засорение или другие временные неисправности при подаче охлаждающей жидкости в аппарат, изменение температуры воздуха, поступающего на аэрацию и др.). Тогда в элементе сравнения 13 определится разность  и сравнится, по абсолютной величине, с заданной величиной ε2. Если
и сравнится, по абсолютной величине, с заданной величиной ε2. Если  то в элементе сравнения определится величина |ε
то в элементе сравнения определится величина |ε
Таким образом, на элемент сравнения 14 поступают значения Δ1 и Δ2 с различными абсолютными величинами и знаками.
Если в рассмотренном случае |Δ1| > |Δ2|, то в элементе сравнения 14 произойдет вычитание из большего значения меньшего, т.е. |Δ1|-|Δ2|, и, с учетом знака большего значения "+", этот элемент будет выдавать корректирующий сигнал на управляющее устройство 15, которое, в свою очередь, будет корректировать управляющий сигнал, поступающий на исполнительный механизм 16, увеличение расхода воздуха на аэрацию пропорционально величине разности |Δ1|-|Δ2|.
Если, например, |Δ1| < |Δ2|. то элемент сравнения 14 определит разность |Δ1|-|Δ2|, и, с учетом знака "-", управляющее устройство 15 корректирует управляющий сигнал на уменьшение расхода воздуха на аэрацию пропорционально величине разности |Δ1|-|Δ2|.
Если же, например, |Δ1| = |Δ2|, и их знаки различные, то управляющее устройство 15 не получает корректирующего сигнала, так как на выходе элемента сравнения будет 0 (ноль), т.е. возмущения, приходящие по разным каналам, взаимно компенсируют друг друга.
Теперь допустим, например, что на элемент сравнения 14 поступают два значения Δ1 и Δ2 , разные по своим абсолютным значениям, но с одинаковыми знаками (например, со знаком "-". Элемент сравнения 14, после сравнения абсолютных величин |Δ1| и |Δ2|, пропустит на управляющее устройство сигнал с большим значением величины, т.е. влияние возмущения по каналу с меньшим значением величины Δ уже учтено, и управляющее устройство 15 вырабатывает корректирующий сигнал (на уменьшение расхода воздуха) в зависимости от абсолютной величины большего Δ.
Предлагаемый способ был проверен экспериментально на дрожжерастительном аппарате типа ВДА-100 на товарной стадии производства дрожжей "В" с использованием воздуходувной машины ТВ-200-1,4 с использованием технологического регламента, принятого на Воронежском дрожжевом заводе, в накопительный период. Для реализации способа были использованы следующие средства автоматизации:
датчик концентрации дрожжевой суспензии - рефрактометрический датчик типа А1-ЕДР с преобразователем МП-П;
датчик расхода воздуха - индукционный расходомер типа ИР-11;
датчик температуры дрожжевой суспензии - термометр сопротивления типа ТСМ-XI;
датчик концентрации кислорода в отработанных газах - кислородомер КМК-59;
дифференцирующие элементы - дифференциаторы типа Д-П;
элементы сравнения - измерительные блоки типа И-УП;
задатчики - программные задатчики типа ПД-44 УМ;
управляющее устройство - электронный регулятор типа РП1-УП.
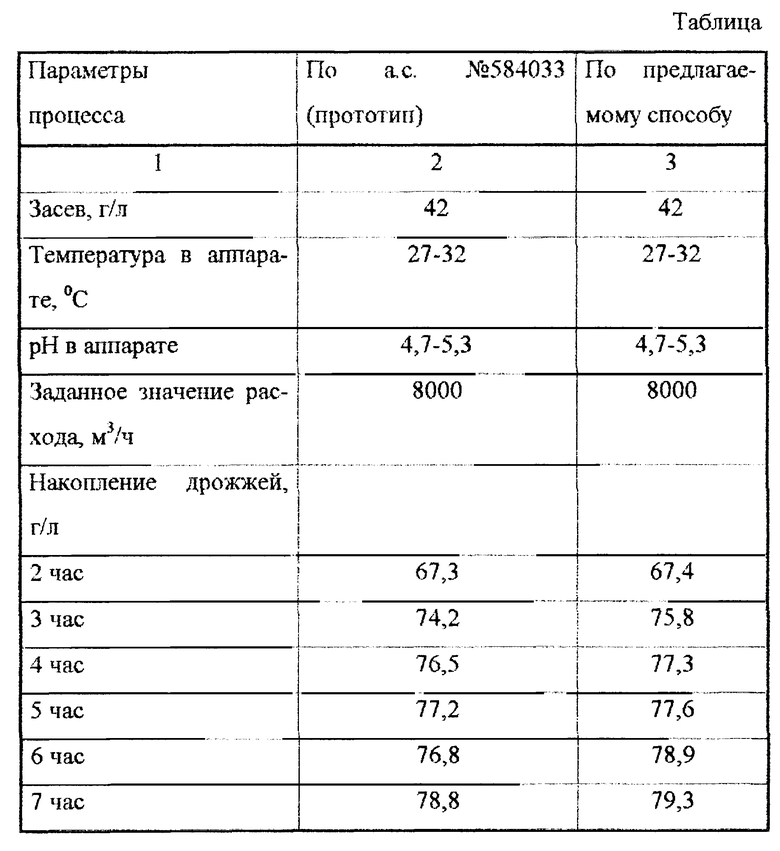
Результаты эксперимента приведены в таблице.
Из эксперимента видно, что только в накопительный период с помощью предлагаемого способа удается повысить выход дрожжей примерно на 5%.
Следовательно, предлагаемый способ позволяет корректно учитывать возмущения по различным каналам с учетом их величин и знаков, а также с учетом их взаимной компенсации и тем самым обеспечивает оптимальные условия ведения процесса выращивания дрожжей и увеличение их выхода.
Изобретение относится к микробиологической промышленности, а именно к способам автоматического управления процессом выращивания микроорганизмов, и может быть использовано при производстве дрожжей хлебопекарных. Данный способ предусматривает определение скорости изменения концентрации дрожжевой суспензии, сравнение ее со скоростью изменения концентрации кислорода в отработанных газах и со скоростью изменения температуры дрожжевой суспензии. При этом в зависимости от результатов сравнения, корректируют подачу воздуха на аэрацию. Данный способ обеспечивает оптимальные условия ведения процесса выращивания дрожжей и увеличение их выхода. 1 ил., 1 табл.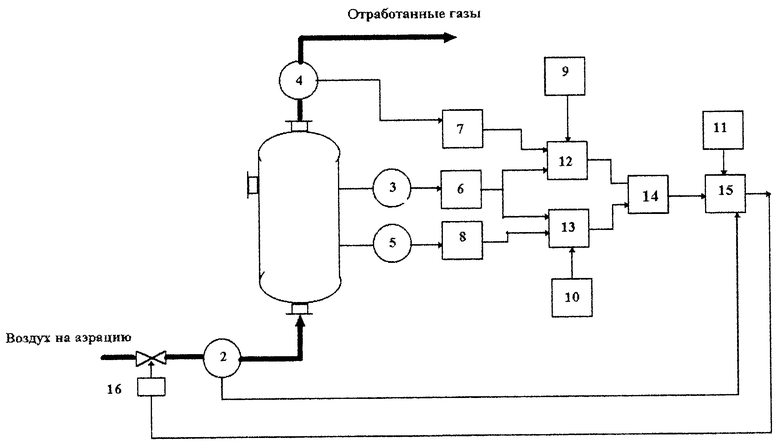
Способ автоматического управления процессом выращивания микроорганизмов, например хлебопекарных дрожжей, заключающийся в регулировании подачи воздуха на аэрацию с коррекцией, измерении температуры дрожжевой суспензии и определении скорости изменения этой температуры, отличающийся тем, что дополнительно определяют скорость изменения концентрации кислорода в отработанных газах и скорость изменения концентрации дрожжевой суспензии, последнюю величину сравнивают со скоростью изменения концентрации кислорода в отработанных газах и со скоростью изменения температуры дрожжевой суспензии, полученные результаты сравнения сравнивают между собой, а коррекцию подачи воздуха на аэрацию осуществляют в зависимости от результата последнего сравнения.
| Способ автоматического управления процессом выращивания дрожжей | 1976 |
|
SU584033A1 |
| Система автоматического управления процессом культивирования микроорганизмов | 1982 |
|
SU1027209A2 |
| Система автоматического управления процессом культивирования микроорганизмов | 1986 |
|
SU1351976A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПЕРИОДИЧЕСКИМ ПРОЦЕССОМ КУЛЬТИВИРОВАНИЯ МИКРООРГАНИЗМОВ | 1994 |
|
RU2074259C1 |
