Изобретение относится к технической кибернетике, предназначено для автоматизированного контроля и диагностики состояния пневмогидравлических систем в энергетике, нефтехимической и ракетной промышленности.
Отказы и неисправности пневмогидравлических систем в этих отраслях промышленности приводят к значительным материальным и экологическим потерям. Поэтому одним из основных требований, предъявляемым к способам контроля и диагностирования пневмогидравлических систем, является достижение минимального времени локализации отказа, которое позволяет парировать последствия неисправности.
Известен способ контроля и диагностики состояний объекта, заключающийся в том, что в процессе работы измеряют параметры во всех контрольных точках и сравнивают их с пороговыми значениями, определяющими ненормальное состояние или прохождение процесса ("ненорма" объекта) [1]. При этом под пороговыми значениями подразумеваются предельные минимальные и максимальные параметры, обеспечивающие работоспособность объекта.
Недостатком способа является низкая достоверность и необходимость обработки значительного объема информации, что приводит к большому времени локализации отказа.
Известен также способ контроля и диагностики объекта, при котором циклически измеряют параметры в основных контрольных точках, сравнивают их с расчетными пороговыми значениями и при выходе их за пороговые значения проводят измерения в дополнительных контрольных точках, вычисляют по ним обобщенные характеристики всех узлов, комплектующих объект, сравнивают их с пороговыми значениями обобщенных характеристик и по результатам сравнения проводят локализацию отказа [2].
Под обобщенной характеристикой узла понимается такая его характеристика, которая позволяет наиболее полно определить его состояние. Например, для насоса, установленного в системе питания пневмогидравлического объекта, такой характеристикой является напорная характеристика, определяемая по перепаду давлений и расходу.
Пороговые значения обобщенных характеристик по известному способу определяются по результатам измерений в начальном периоде эксплуатации как в основных, так и в дополнительных контрольных точках.
Данный способ принят за прототип.
В известном способе последовательность подключения измерений в дополнительных контрольных точках, вычисления по ним обобщенных характеристик узлов, сравнения их с пороговыми значениями и локализация отказов устанавливается жестко последовательно, начиная с 1-й точки до начала эксплуатации объекта. Это усложняет процедуру поиска отказавшего узла, требует значительного объема обрабатываемой информации. Время диагностирования состояния и обнаружения отказавшего узла остается довольно большим.
Задачей изобретения является сокращение объема обрабатываемой информации и времени локализации отказа.
Эта задача решается тем, что при контроле и диагностике пневмогидравлического объекта циклически измеряют параметры в основных контрольных точках объекта, сравнивают их с пороговыми значениями. При выходе основных контрольных параметров за пороговые значения фиксируют их временную последовательность выхода и в этой последовательности измеряют параметры в дополнительных контрольных точках, вычисляют по ним обобщенные характеристики узлов, составляющих объект, сравнивают их со своими пороговыми значениями и по результатам сравнения проводят локализацию отказа, определяя отказавший узел.
Новым в предлагаемом способе является то, что в процессе реализации способа фиксируют временную последовательность выхода за пороговые значения параметров в основных контрольных точках при "ненорме" рабочего процесса, а операции измерения параметров в дополнительных контрольных точках, определения обобщенных характеристик узлов объекта, сравнения их с пороговыми значениями и локализацию отказа при выходе параметров за пороговые значения ведут в последовательности, определяемой последовательностью выхода за пороговые значения параметров в основных контрольных точках.
Положительный эффект при использовании предлагаемого способа заключается в том, что последовательность операции в нем определяется реальным конкретным состоянием объекта, что существенно сокращает объем обрабатываемой информации и время локализации отказа. Пороговые значения обобщенных характеристик при реализации способа могут быть рассчитаны заранее, а могут быть определены по результатам измерений в какой-то короткий начальный период времени как в основных, так и в дополнительных контрольных точках. Дополнительными контрольными точками могут быть места измерения параметров, которые не являются необходимыми при оперативном контроле, но определяют обобщенные характеристики узлов объекта.
На чертеже изображен фрагмент сложной гидравлической системы, где НЦ - центробежный насос; 1,2,3...I - узлы гидравлической цепи; измеряемые параметры: P1...Pi - давления; Qi - расход; n - число оборотов насоса; T - температура рабочей жидкости.
Рассмотрим пример реализации способа применительно к гидравлической системе со шнекоцентробежным насосом, фрагмент которой изображен на чертеже.
На этапе проектирования системы в качестве основных контрольных точек объекта были выбраны давления P3 и Pi+1, которые являются наиболее информативными для заданного перечня возможных неисправных состояний.
При эксплуатации объекта производилось измерение параметров P3 и Pi+1 и сопоставление их с пороговыми значениями. До момента Tk измеренные значения параметров находились в пределах заданных допусков.
На времени Тk был зафиксирован выход за нижний предел сначала параметра Pi+1, а затем параметра P3. Это послужило основанием для фиксирования ненормального состояния объекта и подключения дополнительных измерений, вычисления по ним обобщенных характеристик узлов, сравнения их с пороговыми значениями и локализации отказа путем поиска узла, характеристика которого вышла за пороговые значения. При этом, т.к. первым за пороговое значение вышел контрольный параметр Pi+1, то контроль состояния узлов проводился сначала для узла i, затем для узла i-1, затем для узла i-2, для узла i-3 и т.д. Т. е. подключение дополнительных измерений, вычисление обобщенных характеристик узлов, сравнение их с пороговыми значениями и определение состояния узла проводилось в последовательности i,i-1,i-2,i-3... В качестве обобщенной характеристики узлов использовалась величина коэффициента гидравлического сопротивления.
В результате получены заключения системы о состоянии узлов: узел i - норма, i-1 ненорма, узел i-2 норма и выдано общее заключение об отказе объекта вследствие увеличения гидравлического сопротивления узла i-1 - засорения фильтра, и пневмогидравлический объект был переключен на работу по резервной нитке трубопровода. Локализация отказа была проверена после контроля лишь двух узлов и при частоте опроса 1 измерение/сек, составила ≈ 2 сек.
При реализации способа контроля и диагностики по прототипу подключение дополнительных замеров, вычисление характеристик узлов и сравнение их с пороговыми значениями производится по жесткой программе, начиная с узла 1, затем узел 2 и т.д. При сложном гидравлическом объекте, состоящем из 20-30 гидравлических узлов для локализации данного отказа пришлось бы провести предварительный контроль состояния 20 - 30 узлов и время локализации составило бы 20-30 сек, т.е. в 10...15 раз больше, чем по предлагаемому способу.
Источники информации
1. Авторское свидетельство СССР N 607190, G 05 B 23/02, 1978.
2. Патент РФ N 2018900, 5 G 05 B 23/00, F 15 C 5/00, 1994.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИКИ ПНЕВМОГИДРАВЛИЧЕСКОГО ОБЪЕКТА | 1990 |
|
RU2018900C1 |
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ СОСТОЯНИЯ ПНЕВМОГИДРАВЛИЧЕСКОГО ОБЪЕКТА | 1998 |
|
RU2133952C1 |
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 2009 |
|
RU2393450C1 |
| Способ функционального диагностирования жидкостного ракетного двигателя при огневом испытании | 2020 |
|
RU2781738C2 |
| Способ контроля характеристик агрегатов жидкостного ракетного двигателя при огневом испытании | 2020 |
|
RU2750874C1 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ КОНТРОЛЯ УПРАВЛЯЮЩЕЙ ПРОГРАММЫ ВЫЧИСЛИТЕЛЯ | 2005 |
|
RU2300795C2 |
| СПОСОБ ТЕСТИРОВАНИЯ КАНАЛА УПРАВЛЕНИЯ БОРТОВОЙ АППАРАТУРОЙ КОСМИЧЕСКОГО АППАРАТА | 2016 |
|
RU2653670C1 |
| Способ многоуровневого комплексного контроля технического состояния радиоэлектронных систем | 2018 |
|
RU2694158C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМА РАБОТЫ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ | 1996 |
|
RU2149439C1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА ТЕПЛОВОЙ ТРУБЫ | 1993 |
|
RU2088874C1 |
Изобретение относится к технической кибернетике и позволяет сократить время локализации отказа при эксплуатации пневмогидравлических объектов (О), что и является достигаемым техническим результатом. В процессе контроля (К) циклически измеряют параметры (П) в основных контрольных точках (ОKT) объекта, сравнивают их с пороговыми значениями (ПЗ). При выходе П в ОКТ за ПЗ фиксируют отказ и проводят его локализацию, т.е. поиск отказавшего узла, для чего фиксируют временную последовательность выхода. П и в этой последовательности измеряют П в дополнительных контрольных точках, вычисляют по ним обобщенные характеристики узлов, составляющих объект, сравнивают их со своими ПЗ. По результатам сравнения определяют отказавший узел, обобщенная характеристика которого вышла за ПЗ. 1 ил.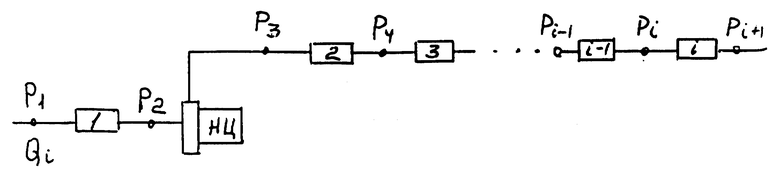
Способ контроля и диагностики пневмогидравлического объекта, заключающийся в том, что циклически измеряют параметры в основных контрольных точках объекта, сравнивают их с пороговыми значениями и при выходе их за пороговые значения измеряют параметры в дополнительных контрольных точках, вычисляют по всем измеренным параметрам обобщенные характеристики узлов, составляющих объект, сравнивают их с пороговыми значениями обобщенных характеристик и по результатам сравнения производят локализацию отказа, отличающийся тем, что фиксируют временную последовательность выхода за пороговые значения параметров в контрольных точках, а все операции измерения параметров в дополнительных контрольных точках, вычисления обобщенных характеристик узлов, сравнения и локализацию отказа ведут в последовательности, определяемой последовательностью выхода за пороговые значения параметров в основных контрольных точках.
| СПОСОБ КОНТРОЛЯ И ДИАГНОСТИКИ ПНЕВМОГИДРАВЛИЧЕСКОГО ОБЪЕКТА | 1990 |
|
RU2018900C1 |
| Диагностическое устройство | 1983 |
|
SU1171808A1 |
| Программатор время-параметр | 1983 |
|
SU1160438A1 |
| СПОСОБ ДИАГНОСТИКИ ГИПЕРИНФЛЯЦИИ ЛЕГКИХ | 2014 |
|
RU2544099C1 |
| СПОСОБ ИММУНОТЕРАПИИ ГНОЙНОГО РИНОСИНУСИТА | 2009 |
|
RU2408385C1 |
| DE 3435465 A1, 13.02.86 | |||
| US 3673577 A, 27.06.72. | |||

